Back
[00:10:00] -!- asdfasd has quit [Ping timeout: 255 seconds]
[00:10:59] -!- rob_h has quit [Ping timeout: 264 seconds]
[00:15:04] -!- Roguish has quit [Quit: ChatZilla 0.9.92 [Firefox 42.0/20151029151421]]
[00:20:08] <CaptHindsight> I wish to thank whomever is responsible for returning this channel to IRC vs a twitter feed
[00:21:59] <malcom2073> You're welcome
[00:33:08] -!- chris_99 has quit [Quit: Leaving]
[00:36:26] -!- justanotheruser has quit [Ping timeout: 252 seconds]
[00:43:26] -!- tinkerer has quit [Remote host closed the connection]
[00:47:23] -!- justanotheruser [justanotheruser!~Justan@unaffiliated/justanotheruser] has joined #linuxcnc
[00:48:52] -!- naja452 [naja452!~androirc@24-177-221-131.dhcp.eucl.wi.charter.com] has joined #linuxcnc
[00:51:18] -!- patrickarlt has quit [Remote host closed the connection]
[00:58:10] -!- AR_ [AR_!~AR@24.238.81.234.res-cmts.sth2.ptd.net] has joined #linuxcnc
[01:03:43] -!- norias [norias!~jm@c-98-219-193-107.hsd1.pa.comcast.net] has joined #linuxcnc
[01:07:14] -!- PetefromTn_ [PetefromTn_!~IceChat9@75-136-59-160.dhcp.jcsn.tn.charter.com] has joined #linuxcnc
[01:16:45] -!- boboss [boboss!~boboss@niv56-1-78-213-236-184.fbx.proxad.net] has joined #linuxcnc
[01:17:02] <t12> dang when said and done
[01:17:06] <t12> i think my moglicing was a success
[01:26:42] <AndChat|407721> Anyone run into problems using zinc plated key stock versus SS 18-8 for servo motors
[01:27:53] -!- erve has quit [Client Quit]
[01:29:11] -!- toner_ has quit [Ping timeout: 260 seconds]
[01:31:36] -!- AndChat|407721 has quit [Quit: Bye]
[01:32:28] -!- duc [duc!~AndChat40@2600:1005:b166:841c:0:4b:7b1f:f901] has joined #linuxcnc
[01:37:15] <Topy44> are there any solidworks users here? or does anyone have a recommendation for an irc channel that might have sw users on it?
[01:37:20] <Topy44> kinda unsure where to look
[01:37:41] <Topy44> (yes its a metaquestion, but its a bit complex an issue to explain it "just in case" :)
[01:37:51] <roycroft> i would start by checking out #solidworks
[01:40:23] <naja452> Has anyone had experience with rack and pinion drives as apposed to belts in a cnc router?
[01:41:06] <CaptHindsight> naja452: they work fine in a router, lathe or gantry
[01:41:12] -!- toner_ [toner_!ink@katsu.triplehelix.org] has joined #linuxcnc
[01:42:13] <naja452> Do yiu know if the manufacturing process lends its self to some drift across a long stretch of rack?
[01:42:36] <CaptHindsight> naja452: thats what encoders are for
[01:42:53] <naja452> :) say you have steppers.
[01:43:00] <naja452> Open loop
[01:43:26] -!- Tecan [Tecan!~fasdf@ip-216-234-182-80.wireless.tera-byte.com] has joined #linuxcnc
[01:43:26] -!- Tecan has quit [Changing host]
[01:43:26] -!- Tecan [Tecan!~fasdf@unaffiliated/unit41] has joined #linuxcnc
[01:43:32] <CaptHindsight> if you use open loop then you are at the mercy of the manufacturing tolerances and your abilities to assemble a machine properly
[01:44:08] <naja452> Also, how would encoders help with inconsistencies in a drive component?
[01:44:15] <Topy44> i know someone that uses a rack and pinion setup for the Z axis of an open loop cnc mill. its a headache.
[01:44:25] amnesic_away is now known as amnesic
[01:44:30] <naja452> If your ballscrew is messed up, your encoder wont know.
[01:44:42] <Topy44> naja452: you'd want positional feedback, not motor position feedback.
[01:45:07] <Topy44> like the glass rulers in large milling machines
[01:45:35] <Topy44> the advantage is that they are imune to backlash
[01:45:46] <Topy44> *immune
[01:45:48] <naja452> Sounds expensive.
[01:46:10] <CaptHindsight> expensive for whom?
[01:46:14] <Topy44> yes. :) though you could go with cheap chinese capacitive calipers
[01:46:28] <Topy44> they are surprisingly accurate. depends on how accurate you need to be.
[01:46:43] <CaptHindsight> that like asking how hard something is to do, or how boring the accounting conference was
[01:46:44] <naja452> Not on a 2 meter stretch though
[01:47:02] <Topy44> true. you can get them up to about 60cm or so afair
[01:48:28] <Topy44> why would you want to go rack and pinion? i'd rather go with a ballscrew
[01:48:37] <CaptHindsight> http://www.romiusa.com/heavy-duty-lathes/ they use rack and pinion for these lathes that are several meters long
[01:48:38] <Topy44> or do you need really high speed?
[01:48:59] <Topy44> hm, when i think about it, a 2 meter ballscrew is not trivial.
[01:49:17] <naja452> It's way cheaper, especially at these lengths
[01:49:27] <naja452> R&p that is
[01:49:47] <CaptHindsight> and they hold <0.001" over that travel using dual servos, one provides the preload for the rack
[01:50:30] <naja452> Preload? How do you mean?
[01:50:50] <Topy44> there is this odd way of using belts, not sure what its called. essentially you have 2 lengths of belt, one fixed to a rail, one on top of it, going around an idler, the pulley, and another idler on the carriage. the belt doesn't move. its essentially using a belt as a rack and pinion system. i could imagine that to be pretty accurate and very cheap. i don't have data to back that up though. :)
[01:51:14] <CaptHindsight> take up any lash in the pinion to rack, even when changing directions
[01:51:18] <Topy44> i guess you have 2 gears, slightly offset?
[01:51:20] <Topy44> right
[01:51:36] <Topy44> so when direction changes the "leading" one changes
[01:51:50] <Topy44> and the back one takes up slack
[01:52:04] <CaptHindsight> http://www.atlantadrives.com/systems1.htm Dual-Pinion Electrical Preload
[01:52:19] <Topy44> yeah that would be exactly what i just tried to describe :)
[01:52:25] <naja452> Wouldn't making sure that the pressure angle is shallow and tensioning the pinion into the rack take out the backlash as well?
[01:52:30] <CaptHindsight> you get a cookie
[01:54:51] <CaptHindsight> http://www.milwaukeegear.com/custom-gears/double-helical-gears.html as another option
[01:55:47] -!- toner_ has quit [Ping timeout: 260 seconds]
[01:56:26] <Topy44> ah, i meant this setup btw:
https://www.youtube.com/watch?v=m_v1LCUSOwY
[01:56:44] <Topy44> (and this too could be doubled up for preloading if using servos instead of steppers)
[01:57:15] <Topy44> its a bit of a hack ofc. not saying its good engineering. :)
[01:57:27] <naja452> Yes, I watched that a few days ago. Interesting setup
[01:57:31] -!- toner_ [toner_!ink@katsu.triplehelix.org] has joined #linuxcnc
[01:57:59] <CaptHindsight> if the belt stretch is not a problem for the design
[01:58:18] <Topy44> CaptHindsight: yes, however having that second length of belt at the bottom helps with that a bit
[01:58:18] <duc> naja452: r+p works fine on my plasma table.
[01:59:10] <Topy44> you could even machine a "rack" matching the belt profile for even better stability. or just screw down the belt every few cm.
[01:59:12] <duc> Purchased for cncrouterparts.com
[01:59:24] <duc> Been using for a few years with no issues
[01:59:38] <Topy44> so you'd only have to deal with a few cm of belt so stretching is less of an issue
[01:59:52] -!- Loetmichel [Loetmichel!~cylly@p54B10F55.dip0.t-ipconnect.de] has joined #linuxcnc
[02:00:33] <CaptHindsight> bbl, out of cookies
[02:01:05] -!- patrickarlt has quit [Remote host closed the connection]
[02:01:14] -!- Loetmichel2 has quit [Ping timeout: 276 seconds]
[02:01:18] R2E4_awy is now known as R2E4
[02:01:19] <Topy44> i want cookies :(
[02:01:41] <duc> Time to poke wife to make cookies
[02:01:43] <duc> Bastards
[02:02:46] -!- toner_ has quit [Ping timeout: 240 seconds]
[02:07:44] -!- Tom_L [Tom_L!~Tom@ip68-102-196-26.ks.ok.cox.net] has joined #linuxcnc
[02:07:44] -!- Tom_L has quit [Changing host]
[02:07:44] -!- Tom_L [Tom_L!~Tom@unaffiliated/toml/x-013812] has joined #linuxcnc
[02:07:50] -!- Tom_L has quit [Read error: Connection reset by peer]
[02:09:50] -!- jfigie [jfigie!~zephyr@65.26.60.4] has joined #linuxcnc
[02:12:24] -!- KGB-wlo has quit [Ping timeout: 255 seconds]
[02:13:10] -!- linuxcnc-build has quit [Ping timeout: 240 seconds]
[02:13:22] -!- seb_kuzminsky has quit [Ping timeout: 256 seconds]
[02:13:26] -!- hm2-buildmaster has quit [Ping timeout: 240 seconds]
[02:15:17] -!- seb_kuzminsky [seb_kuzminsky!~seb@184-96-188-158.hlrn.qwest.net] has joined #linuxcnc
[02:15:17] -!- mode/#linuxcnc [+v seb_kuzminsky] by ChanServ
[02:15:24] <PetefromTn_> jeez man helping my kids with thier algebra homework is such a bitch LOL
[02:15:53] <renesis> i wish i could go back to algebra
[02:16:13] <PetefromTn_> heh I can help you with that ;)
[02:16:27] <renesis> what are they doing right now?
[02:17:11] <PetefromTn_> solve by elimination using multiplication
[02:17:28] <PetefromTn_> and slope intercept problems
[02:18:04] <renesis> im not sure what the first one is, but slope intercept problems are basically life, heh
[02:18:12] <renesis> gain and offset, yo!
[02:18:31] <PetefromTn_> I was not sure either
[02:19:04] <renesis> oh
[02:19:22] <renesis> its just scaling one equation so terms cancel
[02:19:51] <renesis> then you can solve for the remaining single variable, plug back into one of the original equations, solve for the other
[02:20:14] <renesis> heh, i had to do something like that on my statics test couple days ago
[02:20:40] -!- toner_ [toner_!ink@katsu.triplehelix.org] has joined #linuxcnc
[02:20:51] <renesis> petefromtn_: when you have no other options, this shit all comes back real quick, eheheh
[02:21:17] <PetefromTn_> well I actually had to revert to youtube videos to find out what I was doing with it LOL
[02:21:43] <renesis> yeah but how long since you been in school or done theoretical work?
[02:21:57] <PetefromTn_> too long
[02:22:37] <renesis> going back to math classes after years off was kind of hellish
[02:23:04] <renesis> everything is fucked when your algebra and trig is weak
[02:23:18] <PetefromTn_> like right now we have a number that does not divide evenly and that is a problem
[02:23:48] <renesis> so multiply the other thing?
[02:23:58] <renesis> just guessing dont really know what youre doing
[02:24:23] <PetefromTn_> its 2X-3y=21 and 5X-2y=25
[02:24:51] <PetefromTn_> we multiplied the first one by 2 and the second one by 3 to eliminate the Y
[02:24:52] <renesis> multiple right by -2 and left by 5
[02:25:09] <PetefromTn_> but that gives us 19X=117
[02:25:25] <renesis> x=117/19 is the answer
[02:25:37] <PetefromTn_> it is?
[02:25:42] <renesis> ya
[02:25:52] <PetefromTn_> I thought that was wrong LOL
[02:26:10] <renesis> or 6 remainder 3
[02:26:39] <PetefromTn_> now you gotta plug it back in
[02:26:44] <PetefromTn_> and solvefor Y
[02:26:59] <renesis> heh, yeah i would just use 117/19
[02:27:12] <PetefromTn_> you gotta solve for both variables
[02:27:18] <renesis> but hard to say what a basic algebra class expects
[02:27:55] <renesis> 234/19 - 3y = 21
[02:28:37] <renesis> y = (21 - 234/19) / -3
[02:29:30] <PetefromTn_> yeah that is kinda what I got but it seems to not jibe with the rest of what the problems are
[02:29:39] <renesis> y = ((399/19 - 234/19) / -3, y = 155/19 / -3
[02:30:33] <renesis> y = -465/19
[02:30:45] <renesis> is this one of the last ones?
[02:30:58] <PetefromTn_> it is the last one
[02:31:10] <PetefromTn_> but none of the other problems were fractional answers
[02:31:18] <renesis> so theyre maybe just throwing some messy shit in to challenge kids
[02:31:29] <PetefromTn_> and their parents
[02:31:31] <PetefromTn_> bastards
[02:31:34] <PetefromTn_> ;)
[02:31:43] <renesis> i hate math classes
[02:32:27] <renesis> i like applied math, but math for the sake of math is really frustrating for me
[02:32:55] <renesis> i should be in the library right now studying math shit actually
[02:33:07] * renesis procrastinating
[02:33:15] <PetefromTn_> I like math but this stuff is maddening sometimes
[02:33:58] <renesis> http://thewaythetruthandthelife.net/index/2_background/2-1_cosmological/math/mat6/calcul11_files/s196.jpg
[02:34:04] <renesis> this is the kind of shit im doing right now
[02:34:05] <renesis> =(
[02:34:48] <renesis> but sometimes, there are sections that deal with real shit, like sprung damped mass, or methods that are used in electronics, or exponential growth
[02:35:13] <renesis> i do better at that stuff, probably just because i like it more
[02:35:31] <PetefromTn_> you have my sympathies mate
[02:35:39] <renesis> its almost over
[02:35:58] <renesis> if i want to double major in EE, only one more semester of math after this
[02:36:09] <renesis> if i do grad school, i think maybe two more after that
[02:36:15] <renesis> but for now its over
[02:37:38] <renesis> instructor doesnt get why i dont do well on more of the quizes because when i talk to him about stuff he gets the impression i know whats up
[02:37:49] <PetefromTn_> and here I am having trouble with my kids algebra homework sheesh
[02:38:19] <renesis> are they into technical stuff?
[02:39:08] <renesis> if you think they might end up in an engineering or science based field, you should encourage and help them with the algebra as much as you can
[02:39:15] -!- Akex_ has quit [Quit: Connection closed for inactivity]
[02:39:42] -!- Tom_L [Tom_L!~Tom@ip68-102-196-26.ks.ok.cox.net] has joined #linuxcnc
[02:39:42] -!- Tom_L has quit [Changing host]
[02:39:42] -!- Tom_L [Tom_L!~Tom@unaffiliated/toml/x-013812] has joined #linuxcnc
[02:39:58] <renesis> heh, my professor is always talking about how its too late for us, but we should focus on our kids
[02:40:00] <PetefromTn_> that is precisely what I am doing
[02:40:14] <PetefromTn_> but unfortunatly I SUCK at it LOL
[02:40:15] <renesis> cool, big up
[02:40:19] -!- Tom_itx [Tom_itx!~Tl@unaffiliated/toml/x-013812] has parted #linuxcnc
[02:40:58] -!- Tom_L has quit [Client Quit]
[03:12:08] -!- PetefromTn_ has quit [Quit: I'm Outta here!!]
[03:16:14] -!- toner_ has quit [Ping timeout: 265 seconds]
[03:16:56] -!- Tom_itx [Tom_itx!~Tl@unaffiliated/toml/x-013812] has joined #linuxcnc
[03:22:36] -!- Greg___ has quit [Ping timeout: 246 seconds]
[03:23:00] -!- toner_ [toner_!ink@katsu.triplehelix.org] has joined #linuxcnc
[03:23:30] -!- norias has quit [Ping timeout: 255 seconds]
[03:38:58] -!- skunksleep has quit [Ping timeout: 250 seconds]
[03:38:58] -!- R2E4 has quit [Read error: Connection reset by peer]
[03:42:32] -!- skunksleep [skunksleep!~AndChat14@str-broadband-ccmts-ws-26.dsl.airstreamcomm.net] has joined #linuxcnc
[04:14:40] -!- logger[psha] [logger[psha]!~loggerpsh@195.135.238.205] has joined #linuxcnc
[04:14:48] -!- Tecan has quit [Ping timeout: 255 seconds]
[04:16:23] -!- AR_ has quit [Ping timeout: 246 seconds]
[04:26:01] -!- anomynous_ has quit [Read error: Connection reset by peer]
[04:26:27] -!- anomynous_ [anomynous_!~anomynous@188-67-138-66.bb.dnainternet.fi] has joined #linuxcnc
[04:29:23] amnesic is now known as amnesic_away
[04:34:03] -!- naja452 has quit [Ping timeout: 265 seconds]
[04:36:12] -!- tannewt has quit [Quit: My Mac has gone to sleep. ZZZzzz…]
[04:39:48] -!- alex_joni [alex_joni!~alex_joni@emc/board-of-directors/alexjoni] has joined #linuxcnc
[04:39:48] -!- mode/#linuxcnc [+v alex_joni] by ChanServ
[05:34:23] -!- amiri has quit [Ping timeout: 264 seconds]
[06:02:47] -!- jdqx has quit [Ping timeout: 246 seconds]
[06:31:59] -!- skunksleep has quit [Ping timeout: 264 seconds]
[06:32:09] -!- ve7it has quit [Remote host closed the connection]
[06:34:47] -!- skunksleep [skunksleep!~AndChat14@str-broadband-ccmts-ws-26.dsl.airstreamcomm.net] has joined #linuxcnc
[06:40:17] -!- WalterN [WalterN!~Octavia@96-39-185-16.dhcp.mdfd.or.charter.com] has joined #linuxcnc
[06:41:43] WalterN is now known as tiwake
[06:50:34] -!- JesusAlos [JesusAlos!~Thunderbi@80.173.130.240.dyn.user.ono.com] has joined #linuxcnc
[07:07:03] -!- RootB [RootB!~RootB@201.142.255.178.dsl.dyn.telnor.net] has joined #linuxcnc
[07:07:34] -!- tannewt has quit [Quit: My Mac has gone to sleep. ZZZzzz…]
[07:16:40] -!- tannewt has quit [Quit: My Mac has gone to sleep. ZZZzzz…]
[07:21:33] -!- JesusAlos1 [JesusAlos1!~Thunderbi@80.173.130.240.dyn.user.ono.com] has joined #linuxcnc
[07:21:42] -!- JesusAlos has quit [Remote host closed the connection]
[07:21:42] JesusAlos1 is now known as JesusAlos
[07:58:21] -!- anth0ny has quit [Quit: anth0ny]
[08:07:41] -!- bkboggy has quit [Quit: Leaving]
[08:35:10] -!- Deejay [Deejay!~Deejay@unaffiliated/dj9dj] has joined #linuxcnc
[08:35:18] <Deejay> moin
[09:11:13] -!- kyle_rpi has quit [Ping timeout: 252 seconds]
[09:15:47] -!- Valen has quit [Remote host closed the connection]
[09:23:58] -!- kyle_rpi [kyle_rpi!~kyle@c-76-16-216-185.hsd1.il.comcast.net] has joined #linuxcnc
[09:24:42] -!- GargantuaSauce has quit [Ping timeout: 260 seconds]
[09:25:05] -!- Audio has quit [Ping timeout: 246 seconds]
[09:26:12] -!- zhivko [zhivko!bcc64ca3@gateway/web/freenode/ip.188.198.76.163] has joined #linuxcnc
[09:26:26] <zhivko> Hi guys!
[09:27:08] <zhivko> Question here: Is there cheap solution for ethernet servo motors with encoder ?
[09:27:49] <zhivko> I mean, to be able to send tcp and servo motor will interpret it ?
[09:29:57] <zhivko> I want them to be synchronized to be used in 4axis CNC
[09:30:02] <zhivko> Anybody here?
[09:33:12] -!- GargantuaSauce [GargantuaSauce!~sauce@blk-224-177-97.eastlink.ca] has joined #linuxcnc
[09:36:52] <SpeedEvil> zhivko: how well?
[09:37:03] <SpeedEvil> Cheap solution would be esp8266 + RC servos.
[09:37:03] <zhivko> HEy SpeedEvil!
[09:37:21] <zhivko> :) I already build that :)
[09:39:03] <zhivko> https://plus.google.com/+KlemenZhivko/posts/achn3kKYTvv
[09:39:26] -!- Akex_ [Akex_!uid58281@gateway/web/irccloud.com/x-udkgdyxxyfahpfii] has joined #linuxcnc
[09:39:51] <zhivko> but esp8266 is not prooffull, since it doesnt have separate chip for wifi.
[09:40:19] <zhivko> I was thinking about:
http://www.aliexpress.com/item/LinuxCNC-EMC2-ethernet-4-Axis-max-3MHz-pulse-motion-control-card-20-input-IO-8-output/32468176459.html
[09:40:48] <SpeedEvil> 'seperate chip for wifi' is pretty irrelevant, done properly, you have the motor handling on a interrupt.
[09:41:04] -!- rob_h [rob_h!~robh@90.217.27.183] has joined #linuxcnc
[09:42:39] <zhivko> speedevil - what about this aliexpress link I sent - do you think this works OK ?
[09:43:01] <zhivko> they say they send driver for linuxcnc
[09:43:50] <archivist_herron> zhivko, geared axes in linuxcnc is known art
[09:44:15] <zhivko> speedevil - geared axis ? what do you mean?
[09:44:33] <zhivko> rack and pinion ?
[09:44:54] <zhivko> archivist: what's the issue there? Why is that an issue ?
[09:45:52] <archivist_herron> not an issue
[09:46:28] <zhivko> As I know CNC by know - it seems that ethernet servo with encoder motor could solve all this issues - fast mbit ethernet and linuxcnc...
[09:46:53] <zhivko> HAs somebody thought about this ? Has somebody did something similar in diy way ?
[09:48:09] <archivist_herron> linuxcnc and ethernet using the mesa cards works, what is not being looked at is the closed source ethernet drivers
[09:53:34] <zhivko> archivist: "closed source" is closed loop with encoder servo? Sorry I don't speek CNC language very fluently... Can you please help me understand?
[09:54:54] <archivist_herron> companies own the protocol used over ethernet
[09:55:11] <archivist_herron> we cannot use copyright protocols
[09:55:36] <zhivko> mesa card is not opensourced?
[09:55:48] <archivist_herron> mesa is opensource
[09:56:11] <zhivko> Where can I find more info - for example sample configuration of linuxcnc with mesa card
[09:56:25] <zhivko> I need to build 4 axis cnc..
[09:57:02] <archivist_herron> what we dont have is ethernet direct to ethernet servos
[09:58:44] <archivist_herron> http://linuxcnc.org/docs/html/
[10:02:50] -!- kyle_rpi has quit [Ping timeout: 244 seconds]
[10:03:11] <zhivko> I see there are some industrial servos that have closed loop ethernet support - So how can I aproach this from linuxcnc ? No way currently ?
[10:06:59] <Sync> http://wiki.linuxcnc.org/cgi-bin/wiki.pl?EtherCatDriver
[10:11:55] <zhivko> Sync: what servo ethernet provider (cheap possibly) can I choose from - can you recomend something ?
[10:11:58] -!- JesusAlos has quit [Quit: JesusAlos]
[10:13:23] -!- Barfious_PC [Barfious_PC!32baff89@gateway/web/cgi-irc/kiwiirc.com/ip.50.186.255.137] has joined #linuxcnc
[10:13:52] <Barfious_PC> So recently I took apart a large copy machine.
[10:14:26] <Barfious_PC> I recovered lots of motors, steppers, rods, all sorts of sensors
[10:15:15] -!- RoyBellingan [RoyBellingan!~roy@195.189.129.21] has joined #linuxcnc
[10:15:18] <Barfious_PC> there are these optical sensors throughout the machine, and I think it might be possible to build an encoder with them
[10:15:26] -!- kyle_rpi [kyle_rpi!~kyle@c-76-16-216-185.hsd1.il.comcast.net] has joined #linuxcnc
[10:16:05] <Barfious_PC> I've seen some neat videos where this german guy made a closed loop dc servo with an H bride, and a home made encoder
[10:16:37] <SpeedEvil> You can buy actual specified encoders
[10:16:39] <SpeedEvil> cheapl
[10:16:40] <SpeedEvil> y
[10:16:47] <Barfious_PC> yeah but what is the fun in that
[10:17:02] <SpeedEvil> Being able to make another servo after you run out of scavenged parts.
[10:17:19] <Barfious_PC> these are my playing around and learning projects
[10:17:36] <Barfious_PC> I've already got my mill to satisfy doing it right
[10:17:38] <SpeedEvil> Fair enough
[10:17:52] <Barfious_PC> here one second
[10:18:20] <Barfious_PC> https://www.youtube.com/watch?v=PQ1FBcQT0AI
[10:18:51] <Sync> zhivko: ethercat and cheap does not go together
[10:19:14] <Barfious_PC> if you jump to around 5 minutes , you can see he made an encoder with a two optical sensors
[10:19:26] <zhivko> I am looking for closed loop servo (with encoder), that can be connected to ethercat. Lets say Less Expensive :)
[10:19:33] <MrSunshine> hmm this with table for the router is hard ... made it out of mdf .. and ofc it warps like crazy when skimming it off making vacuum seal not working to great and stuff :/
[10:19:35] <Barfious_PC> and a wheel made from a cd. I'm sure I could cut a wheel out on my mill
[10:19:44] <MrSunshine> and thick plastic sheets are frekkin expensive :/
[10:20:09] <zhivko> Barfious_PC: I dont want to make this closed loop by myselve, I have tight deadlines...
[10:20:24] <MrSunshine> thinking of making the table bottom in steel and then have a sacrificial sheet on top but i dont know :/
[10:20:46] -!- asdfasd [asdfasd!~332332@90.194.75.33] has joined #linuxcnc
[10:20:47] <Barfious_PC> if i was making a vac table i would go aluminum
[10:20:57] <Barfious_PC> but that would be for my mlll
[10:21:32] <Barfious_PC> this guy is doing this encoder with an arduino , but i was wondering, can you read two optical sensors like that directly from the parport?
[10:21:40] <Barfious_PC> i mean with linuxcnc
[10:22:04] <MrSunshine> Barfious_PC: problem is that the table is 125x125cm =)
[10:24:22] <Barfious_PC> I just want to know if theoretically its possible to read a diy encoder like that from the parport using a wheel and two optical sensors
[10:24:27] <MrSunshine> maybe make it out of corian :P
[10:24:31] <MrSunshine> tho thats quite expensive :P
[10:24:36] <MrSunshine> but a nice material =)
[10:25:29] <Barfious_PC> MrSunshine: im not understanding , is 125x125 cm too big or too small for aluminum?
[10:26:08] <MrSunshine> Barfious_PC: big to make it out of i think .. tho might not be but feels big =) sheets that size and like 12mm thick would be quite expensive also =)
[10:26:33] <MrSunshine> and do not have the means to weld alu :/
[10:27:16] <MrSunshine> then again .. i do not have the means to glue corian either :P
[10:27:20] <Barfious_PC> do you have a high speed spindle?
[10:27:31] <MrSunshine> Barfious_PC: 24k rpm on the router
[10:27:55] <Barfious_PC> melt hdpe into a slab
[10:28:06] <Barfious_PC> and mill it
[10:28:33] <Barfious_PC> or polyproplene
[10:28:55] <Barfious_PC> in an oven
[10:29:02] <MrSunshine> a slab of 125x125cm ?
[10:29:16] <MrSunshine> thats about 50x50 inches
[10:29:23] <MrSunshine> if you do not speak cm =)
[10:29:34] <Barfious_PC> yeah lol i just converted it
[10:29:51] <Barfious_PC> you probably dont have access to an oven that size
[10:30:18] <MrSunshine> 460 usd for a sheet of 2x1 meter of 12mm alu :P
[10:32:10] <MrSunshine> oh well, dogwalk!
[10:33:28] <Barfious_PC> how about some hardwood
[10:33:44] <MrSunshine> wood bends and bows and changes with humidity :/
[10:33:49] <MrSunshine> not very good for a table realy :/
[10:34:02] <Barfious_PC> how about impregnate it with epoxy
[10:34:38] <Barfious_PC> idk anything denser than wood that size and likely thickness, price tags
[10:35:10] <Barfious_PC> some composite material
[10:35:30] -!- AndChat|144384 [AndChat|144384!~AndChat14@str-broadband-ccmts-ws-26.dsl.airstreamcomm.net] has joined #linuxcnc
[10:35:50] <Barfious_PC> i wish the market for plastic / fiber composites was better
[10:36:08] <Barfious_PC> there are some cool plastic / mineral composites too
[10:37:15] -!- skunksleep has quit [Ping timeout: 250 seconds]
[10:38:05] <Barfious_PC> expand budget
[10:47:22] amnesic_away is now known as amnesic
[10:47:53] -!- chris_99 [chris_99!~chris_99@unaffiliated/chris-99/x-3062929] has joined #linuxcnc
[10:48:15] -!- Tecan [Tecan!~fasdf@unaffiliated/unit41] has joined #linuxcnc
[10:52:30] <archivist_herron> zhivko,
http://wiki.linuxcnc.org/cgi-bin/wiki.pl?EtherCatDriver
[10:52:54] <archivist_herron> but you probably have a certain amount of work to do
[10:55:07] <zhivko> archivist_herron: OK - but to estimate cost with full ethercat solution - can you help me to find 2NM closed loop stepper that supports ethercat - its 4 axis CNC
[10:55:32] <archivist_herron> best to forget ethercat
[10:55:42] <archivist_herron> just use normal stuff
[10:57:29] -!- AndChat|144384 has quit [Ping timeout: 276 seconds]
[11:03:14] <Tecan> https://scontent.xx.fbcdn.net/hphotos-ash2/v/t1.0-9/q81/s720x720/10520772_391799844318762_6658492397936095669_n.jpg?oh=c761de93021b0e141c45c06b48a3b736&oe=56B71A52
[11:04:00] <Tecan> xmas tree decoration for the side of house
[11:11:14] -!- norias [norias!~jm@c-98-219-193-107.hsd1.pa.comcast.net] has joined #linuxcnc
[11:13:02] <gonzo_> morning peoples
[11:13:43] <gonzo_> have some more silly basic questions to fire into the aether, hoping someone will enlighten me
[11:14:43] <gonzo_> have a testbed set up, using the hal stepper config, but I have changed one axis to servo.
[11:15:41] <gonzo_> the closed loop control of the motor looks good amd I have the encoder output feeding back to axit.00.motor-fb (from mem, as I'm not near the machine at the mo)
[11:15:46] -!- kengu has quit [Ping timeout: 240 seconds]
[11:16:19] -!- kengu [kengu!mii@pepper.modeemi.fi] has joined #linuxcnc
[11:16:41] <gonzo_> I see the encoder posn in the AXIS display and have it set to show the actual position rather than the planned posn for the tool
[11:17:17] <gonzo_> But what I seem to be getting on the graphic for the tool, is the target posn, not the actual
[11:19:09] <gonzo_> also, it seems to be ignoring the encoder posn when moving the tool. eg. the tool will move into the work, before the X (servo) has actually reached the new cut posn
[11:19:47] <gonzo_> looking like the motion planner (if that is the correct term) is not seeing the actual encoder posn
[11:20:10] <gonzo_> anyone give me a pointer where the prob could be
[11:21:38] -!- Barfious_PC has quit [Quit: http://www.kiwiirc.com/ - A hand crafted IRC client]
[11:24:50] -!- skunkworks has quit [Ping timeout: 240 seconds]
[11:28:58] -!- KimK_ has quit [Ping timeout: 260 seconds]
[11:31:11] -!- Loetmichel2 [Loetmichel2!~cylly@p54B10E23.dip0.t-ipconnect.de] has joined #linuxcnc
[11:31:26] amnesic is now known as amnesic_away
[11:32:44] -!- Loetmichel has quit [Ping timeout: 244 seconds]
[11:32:45] -!- norias has quit [Ping timeout: 252 seconds]
[11:35:56] <archivist_herron> gonzo_, you would be getting following errors
[11:36:52] -!- taruti has quit [Ping timeout: 244 seconds]
[11:39:50] <gonzo_> am I correct in setting axis.00.motor-fb from the encoder
[11:40:44] <gonzo_> there is a comment in the example that this is to send the value to the display in AXIS graphic prog. But I think this may be incorrect
[11:40:57] <gonzo_> axis.00.... is the motion planner???
[11:45:13] <archivist_herron> http://linuxcnc.org/docs/html/man/man9/motion.9.html
[11:49:45] -!- zhivko has quit [Ping timeout: 246 seconds]
[11:49:52] <gonzo_> thanks. Looks like I have it correct. The reference to AXIs in the comment block is misleading
[11:52:13] <gonzo_> so if I am sending the actual position to motion, why would AXIS be displaying the target posn rather than the actual
[11:52:32] <gonzo_> and the tool path seems to be ignoring this actual posn?
[11:53:47] <archivist_herron> have you connected stuff incorrectly in the files
[11:56:08] <gonzo_> I don't think so. As I am seeing the correct actual encoder position in AXIS prog
[11:56:45] <gonzo_> I mean the displayed X poxn value
[11:57:08] -!- Mandeep [Mandeep!~Mandeep@123.237.61.146] has joined #linuxcnc
[11:57:21] <gonzo_> though the tool icon on the graphic seems to follow thetarget path
[12:05:48] -!- quiqua has quit [Client Quit]
[12:12:52] -!- norias [norias!~jm@2601:549:c001:2ddc:602e:c1a5:95e1:5aa0] has joined #linuxcnc
[12:13:38] -!- JesusAlos [JesusAlos!~Thunderbi@80.173.130.240.dyn.user.ono.com] has joined #linuxcnc
[12:16:58] -!- skunksleep [skunksleep!~AndChat14@str-broadband-ccmts-ws-26.dsl.airstreamcomm.net] has joined #linuxcnc
[12:17:23] <XXCoder> gonzo_: hope you find solution
[12:19:56] <gonzo_> ta. me too!
[12:20:29] <gonzo_> really am starting from the basics here, so lots of silly questions
[12:21:33] -!- norias has quit [Ping timeout: 272 seconds]
[12:21:48] <gonzo_> this seems quite a US centric chan, so will re-ask when they are all awake!
[12:22:01] -!- vascoreggiando11 has quit [Client Quit]
[12:23:41] <XXCoder> yeah im american too but Im awake 1 pm to 5 am usually
[12:23:45] <XXCoder> its now 4 am
[12:24:30] -!- user__ has quit [Ping timeout: 240 seconds]
[12:24:43] <Tecan> LINUX
[12:25:04] <Tecan> FTW
[12:25:24] <malcom2073> Every time I see someone say something like that, I just think of the whole "Team Jacob" thing
[12:25:32] <malcom2073> It makes me chuckle though :P
[12:47:23] -!- jfigie has quit [Quit: Ex-Chat]
[13:00:38] <jthornton> is the lower image in this page out of place
http://gnipsel.com/recipes/index.html
[13:00:50] <malcom2073> The background is out of place
[13:00:56] <malcom2073> I thought I was on ytmnd
[13:01:35] <jthornton> it looks ok local but online it's messed up for m
[13:01:36] <jthornton> e
[13:02:28] <_methods> is it supposed to be centered?
[13:03:05] <malcom2073> what it looks like to me:
http://i.imgur.com/GTnq43q.png
[13:03:24] <_methods> yep me too
[13:04:05] <XXCoder> meow mix
[13:04:23] -!- taruti has quit [Ping timeout: 264 seconds]
[13:04:36] <XXCoder> be careful what you brag to superman. heh
http://smbc-comics.com/index.php?db=comics&id=788#comic
[13:05:28] <jthornton> this is what I see
http://ibin.co/2NCpeIXO10oc
[13:05:53] <jthornton> yours look right
[13:06:32] <malcom2073> Yours looks like you need to get out of the 80's with your video card :P
[13:07:04] <jthornton> brand new computer lol
[13:07:23] <XXCoder> my 9 year old pc could do larger res
[13:08:31] <malcom2073> My 7 year old PC *does*
[13:21:30] -!- chris_99 has quit [Quit: Leaving]
[13:28:55] <lair82> Good Morning Guys, have a question regarding my new servo, should tune the drive/servo with the servo mounted in the rotary table, or should I tune the servo by itself on the table then install the motor after it is tuned?
[13:30:10] -!- chris_99 [chris_99!~chris_99@unaffiliated/chris-99/x-3062929] has joined #linuxcnc
[13:30:17] <lair82> I'm not referring to the cnc tuning, just getting the servo tuned to the drive itself
[13:33:09] <archivist_herron> with the mass mounted I would assume
[13:34:15] -!- KimK [KimK!~Kim__@ip68-102-29-211.ks.ok.cox.net] has joined #linuxcnc
[13:38:38] -!- Mandeep has quit [Quit: Leaving]
[13:47:04] -!- KimK has quit [Ping timeout: 244 seconds]
[13:48:55] -!- KimK [KimK!~Kim__@ip68-102-29-211.ks.ok.cox.net] has joined #linuxcnc
[13:55:01] -!- Greg has quit []
[13:55:29] -!- greg [greg!4b1b664f@gateway/web/freenode/ip.75.27.102.79] has joined #linuxcnc
[14:02:19] -!- c_morley has quit [Ping timeout: 240 seconds]
[14:02:59] -!- GJdan has quit [Ping timeout: 240 seconds]
[14:03:00] -!- c_morley [c_morley!~chris@S0106204e7f8c229b.no.shawcable.net] has joined #linuxcnc
[14:05:03] <CaptHindsight> I don't know much about machine design or servos but I have a revolutionary design I'd like to use. Can someone help me and I will only argue and hand wave for possibly 30 minutes about it :)
[14:05:37] <ReadError> thought I was in #reprap for a second there
[14:05:42] <archivist_herron> just put it on kickstarter the loons will buy regardless
[14:09:10] <archivist_herron> call it the Lemon, mention it is made only on Friday afternoons just before home time
[14:10:38] <archivist_herron> http://www.phrases.org.uk/meanings/143350.html
[14:12:22] <CaptHindsight> archivist_herron: we had something similar here but it went on further to explain why you also didn't want a Monday or Wednesday car either
[14:12:23] <archivist_herron> iirc the term was in common use in the 1970's
[14:12:38] amnesic_away is now known as amnesic
[14:12:58] <greg> I'm finally getting to electronics in my lathe. I have Mesa 7i76, but might want to use 7i77 instead. I don't know much about this stuff, is anything additional required to run a spindle with 7i77? The spindle with run VFD and machine has 360ppr+index.
[14:13:14] -!- KimK has quit [Ping timeout: 260 seconds]
[14:14:16] <JT-shop> are your axes stepper or servo?
[14:16:17] <greg> servos, I was planning for gecko drives, because I had experience with them. I may just set it up to close the loop in linuxcnc instead.
[14:20:59] -!- lair82_ has quit [Quit: Page closed]
[14:21:15] -!- Audioburn has quit [Ping timeout: 272 seconds]
[14:22:24] <JT-shop> good plan
[14:22:52] <JT-shop> G320's are for when you don't have hardware like Mesa
[14:26:47] <archivist_herron> I find it hard to think of stepdir things as proper servos
[14:29:03] -!- FinboySlick [FinboySlick!~shark@74.117.40.10] has joined #linuxcnc
[14:30:39] <greg> I can't complain about how they work on a mill I built a long time ago.
[14:32:02] -!- KimK [KimK!~Kim__@ip68-102-29-211.ks.ok.cox.net] has joined #linuxcnc
[14:41:50] -!- KimK has quit [Ping timeout: 240 seconds]
[14:53:39] -!- ktchk [ktchk!~eddie6929@n219079250048.netvigator.com] has joined #linuxcnc
[14:53:59] -!- gaute has quit [Quit: Page closed]
[14:56:18] -!- skunkworks has quit [Ping timeout: 246 seconds]
[14:58:59] -!- KimK [KimK!~Kim__@ip68-102-29-211.ks.ok.cox.net] has joined #linuxcnc
[15:04:11] -!- KimK has quit [Ping timeout: 250 seconds]
[15:06:54] -!- arekm has quit [Ping timeout: 260 seconds]
[15:07:32] -!- KimK [KimK!~Kim__@ip68-102-29-211.ks.ok.cox.net] has joined #linuxcnc
[15:10:04] -!- basiclaser has quit [Quit: Connection closed for inactivity]
[15:13:43] amnesic is now known as amnesic_away
[15:15:23] <ktchk> Hi Kimk
[15:16:45] <ktchk> Will Linuxcnc drive a tangent knife??
[15:21:23] <_methods> like this?
[15:21:25] <_methods> http://imgur.com/gallery/xFkhofN
[15:22:10] -!- Simonious has quit [Ping timeout: 240 seconds]
[15:23:04] <ktchk> cutting air, no
[15:23:09] <_methods> hehe
[15:29:05] -!- anth0ny has quit [Quit: anth0ny]
[15:29:43] -!- Simonious [Simonious!~sgoble@h69-21-230-45.mntimn.dedicated.static.tds.net] has joined #linuxcnc
[15:35:46] -!- RoyBellingan has quit [Quit: Konversation terminated!]
[15:36:34] -!- KimK has quit [Read error: Connection timed out]
[15:42:02] -!- RoyBellingan [RoyBellingan!~roy@195.189.129.21] has joined #linuxcnc
[15:45:32] -!- Tecan has quit [Quit: Live Long And Phosphor!]
[16:01:46] -!- KimK [KimK!~Kim__@ip68-102-29-211.ks.ok.cox.net] has joined #linuxcnc
[16:02:35] -!- Nick001-shop [Nick001-shop!~chatzilla@50.107.138.87] has joined #linuxcnc
[16:09:27] -!- ivansanchez has quit []
[16:13:12] -!- ktchk [ktchk!~eddie6929@n219079250048.netvigator.com] has parted #linuxcnc
[16:13:30] amnesic_away is now known as amnesic
[16:15:06] -!- taruti has quit [Ping timeout: 240 seconds]
[16:22:53] -!- arekm [arekm!~arekm@phobos.pld-linux.org] has joined #linuxcnc
[16:22:53] -!- arekm has quit [Changing host]
[16:22:53] -!- arekm [arekm!~arekm@pld-linux/arekm] has joined #linuxcnc
[16:29:38] -!- KimK has quit [Read error: Connection timed out]
[16:33:27] -!- KimK [KimK!~Kim__@ip68-102-29-211.ks.ok.cox.net] has joined #linuxcnc
[16:37:20] -!- dan2k3k4 has quit [Ping timeout: 246 seconds]
[16:39:34] <lair82> pcw_home, you floating around yet?
[16:41:42] -!- Nick001-shop has quit [Ping timeout: 244 seconds]
[16:49:27] -!- KimK has quit [Ping timeout: 255 seconds]
[16:51:09] -!- KimK [KimK!~Kim__@ip68-102-29-211.ks.ok.cox.net] has joined #linuxcnc
[16:52:40] -!- gonzo_nb [gonzo_nb!~gonzo@host-92-6-244-28.as43234.net] has joined #linuxcnc
[16:59:46] <FinboySlick> _methods: Should have been a butterfly knife, like in those '80s movies.
[17:01:04] <_methods> heheh
[17:01:15] <_methods> butterfly knife tentacle
[17:01:21] <_methods> sounds like a good password
[17:01:33] <FinboySlick> Not anymore!
[17:01:40] <_methods> hahaha
[17:03:05] <CaptHindsight> words you probably won't hear at Thanksgiving dinner
[17:04:32] <CaptHindsight> I started getting emails yesterday about people being gone until Dec 1
[17:07:20] <CaptHindsight> looks like the last 2 weeks of December are going to be dead as well
[17:07:52] <CaptHindsight> with xmas and new years on Fridays
[17:09:56] -!- KimK has quit [Ping timeout: 276 seconds]
[17:11:26] <Jymmm> (NSFW) Can you find the red boots?
https://i.imgur.com/yWqtYG2.jpg
[17:14:08] -!- Nick001-shop [Nick001-shop!~chatzilla@50-32-107-72.adr01.dlls.pa.frontiernet.net] has joined #linuxcnc
[17:14:48] <Jymmm> CaptHindsight: And nobody works on those days, so exclude the day(s) before then too.
[17:14:57] <CaptHindsight> Jymmm: you know I've heard that there are websites with tons of those things on the intertubes
[17:15:39] <Jymmm> CaptHindsight: Hi-res, no ads, direct link?
[17:15:42] <CaptHindsight> Dec 18 - Jan 4
[17:16:21] -!- KimK [KimK!~Kim__@ip68-102-29-211.ks.ok.cox.net] has joined #linuxcnc
[17:17:46] -!- md-2 has quit [Quit: Leaving...]
[17:23:39] -!- lair82 has quit [Ping timeout: 246 seconds]
[17:27:48] -!- lair82 [lair82!616b5c34@gateway/web/freenode/ip.97.107.92.52] has joined #linuxcnc
[17:57:34] -!- anomynous [anomynous!~anomynous@188-67-138-66.bb.dnainternet.fi] has joined #linuxcnc
[17:57:55] -!- RoyBellingan has quit [Quit: Konversation terminated!]
[17:58:48] -!- anomynous_ has quit [Ping timeout: 265 seconds]
[18:07:45] -!- patrickarlt has quit [Ping timeout: 255 seconds]
[18:28:16] -!- KimK has quit [Read error: Connection timed out]
[18:31:00] <FinboySlick> Well, since it's fancy picture day:
http://img.pandawhale.com/159155-otter-dinner-table-gif-Imgur-T-PvAn.gif
[18:31:59] Erant_ is now known as Erant
[18:36:43] -!- KimK [KimK!~Kim__@ip68-102-29-211.ks.ok.cox.net] has joined #linuxcnc
[18:52:23] -!- jduhls has quit [Ping timeout: 264 seconds]
[18:52:42] <_methods> why i otter
[18:53:10] -!- kwallace has quit [Ping timeout: 240 seconds]
[18:57:02] <SpeedEvil> http://imgur.com/gallery/KYo5P I never thought she could fit those balls in her mouth (sfw)
[18:57:42] -!- KimK has quit [Read error: Connection timed out]
[18:58:58] -!- [qube] [[qube]!~cube@204.237.15.88] has joined #linuxcnc
[19:00:06] * JT-shop just saved the jig saw from going in the recycle bin after getting ran over with the dozer with a sliver of wood
[19:01:10] -!- [cube] has quit [Ping timeout: 260 seconds]
[19:01:14] [qube] is now known as [cube]
[19:01:15] -!- KimK [KimK!~Kim__@ip68-102-29-211.ks.ok.cox.net] has joined #linuxcnc
[19:02:07] <SpeedEvil> err - what?
[19:02:14] <SpeedEvil> you mean you repaired it with wood?
[19:11:18] -!- JesusAlos has quit [Quit: JesusAlos]
[19:20:11] <JT-shop> yea jammed a sliver of wood behind the lock
[19:21:52] -!- DaPeace has quit [Quit: Leaving.]
[19:27:27] -!- andypugh [andypugh!~andypugh@cpc14-basl11-2-0-cust1010.20-1.cable.virginm.net] has joined #linuxcnc
[19:28:23] <andypugh> Installing all the dependencies to build linuxCNC, I ran out of disk space.
[19:28:29] <lair82> Hey guys, working on my A-axis, if I am looking straight at the faceplate on the rotary, and I command a positive move, should it spin CW or CCW? Obviously pretty elementary considering, but I have never dealt with one of these.
[19:28:35] <andypugh> So, I purged all the applications I knew I wouldn’t need.
[19:28:58] <andypugh> Like Libre Office, VLC, that sort of thing.
[19:30:00] <andypugh> Then I did “Sudo apt-get autoremove” and watched in astonishment as it removed lightdm, X11, and just about everything else. Including whatever resolves domain names to get things back again. That could have gone better.
[19:31:02] <cradek> heh it's always good to read the screen before agreeing to a big removal. I've screwed that up in recent memory too.
[19:31:06] <cradek> recent
[19:31:14] <_methods> just hit y
[19:31:19] <_methods> like a boss
[19:32:49] <rob_h> lair82, plus move on a Rotary is generaly CW .. but depends on machines and setups.. as normaly cam posts are coustomized to machine setups when get multi axis
[19:33:00] <andypugh> So, is it possible to remove Libre office and retain a GUI OS?
[19:33:48] <cradek> I suspect you had that, right until you did the autoremove
[19:34:11] <cradek> autoremove removes things that were initially installed because they were a dependency of something else, but that something else is now gone
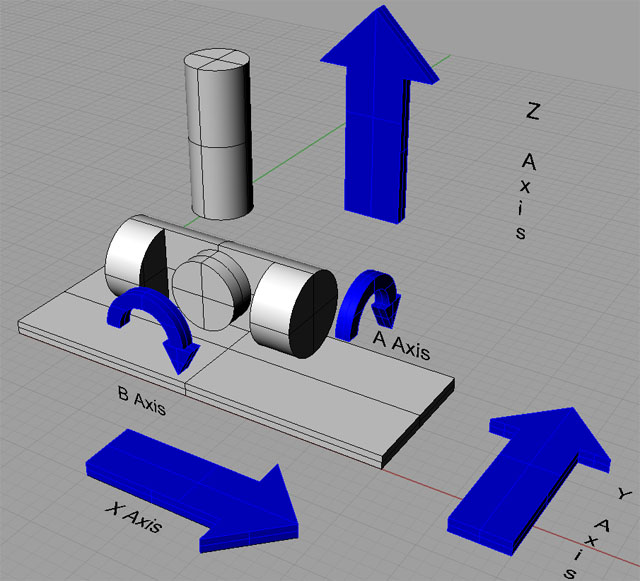
[19:34:28] <lair82> rob_h, opposite of this then?
http://www.cnccookbook.com/img/CNCCookbook/5AxisMillAxes.jpg
[19:34:36] <andypugh> cradek: Any way back other than reinstalling from scratch? I already spent two evenings trying to get a system that I could build linuxCNC on
[19:34:46] <greg> http://www.mfgaa.com/5axis.table.table.jpg
[19:34:58] <lair82> It said that the arrow points in the positive g-code dimension
[19:35:21] <cradek> what do you mean by back exactly? (I wish there was an undo in apt)
[19:35:50] -!- DaPeace [DaPeace!~Adium@46.243.107.151] has joined #linuxcnc
[19:35:51] <cradek> if you do an install command with the same things you removed, I think it will be exactly back
[19:35:58] <lair82> Well that just confused the shit out of me
[19:36:19] <andypugh> lair82: That cnccookbook picture is inconsistent
[19:36:37] <Jymmm> There is a way using git + apt, but it has to be setup in advance.
[19:36:50] <andypugh> Looking along the X and Y arrows has A anticlockwise and B cllockwise
[19:36:52] <rob_h> is your A axis in the Y axis or in the X axis like most have it
[19:37:03] <lair82> Makes sense now after looking at the x and y
[19:37:13] <lair82> No the A is on the X
[19:37:19] <cradek> yeah that image has got to be wrong
[19:37:28] <greg> crap, the one I posted is dumb too.
[19:37:30] <andypugh> cradek: Hmm, I wonder what to start with? X11?
[19:37:33] <cradek> A,B should both be RH or both LH
[19:37:53] <rob_h> like on our matsuura we have C and B axis... C rotary.. B is tilt
[19:38:12] <lair82> I will go with greg's
[19:38:16] amnesic is now known as amnesic_away
[19:39:01] <cradek> andypugh: I think the metapackages are called task-something. I see task-desktop and task-xfce-desktop for instance
[19:40:20] <cradek> but those will put whatever-office back I'm sure
[19:40:44] <andypugh> I think I am screwed. apt can’t resolve any URLs
[19:40:54] <cradek> wow :-/
[19:41:41] <andypugh> Is there a “light” Debian?
[19:41:46] <cradek> what was your install originally? is it just our image, but your space is small?
[19:42:00] <andypugh> I “only” have 8GB
[19:42:13] <andypugh> Yeah, LinuxCNC .iso
[19:42:14] <_methods> yoikes
[19:42:19] <Jymmm> http://stackoverflow.com/questions/8647454/how-to-get-a-list-of-repositories-apt-get-is-checking
[19:42:30] <cradek> 8 seems like it would be enough
[19:42:39] <cradek> do you care about building linuxcnc packages, or just rip without docs?
[19:43:20] <andypugh> just a rip, really
[19:43:29] -!- [qube] [[qube]!~cube@204.237.15.88] has joined #linuxcnc
[19:43:36] <cradek> the docs toolchain is probably what was so big
[19:43:40] <cradek> it pulls in a lot of stuff
[19:43:49] <andypugh> Well, yes.
[19:44:17] <andypugh> But I am sure it all fitted with Lubuntu
[19:44:35] <cradek> if you reinstall and then remove office again (and read the screen carefully before saying yes), and then don't do the autoremove, you might be ok?
[19:44:50] <andypugh> Well, I know it did, the machine in question was my LinuxCNC dev box for a couple of years
[19:45:30] -!- [cube] has quit [Ping timeout: 260 seconds]
[19:45:39] <andypugh> All I want is kernel + GUI. The rest I can install as-required
[19:46:07] <andypugh> (Help me! I am being drawn to Gentoo…)
[19:47:09] <greg> 4th orientation can go either way, like was said you can configure it in your CAM post.
[19:47:22] -!- __rob [__rob!~rob@5.80.65.57] has joined #linuxcnc
[19:47:24] <__rob> hello
[19:48:05] <CaptHindsight> andypugh: there used to be trimmed down versions of Debian available
[19:48:08] <__rob> anyone know of any nice motor that will run extremely smoothly at very low speed
[19:48:14] <__rob> or should i just get a geared one ?
[19:48:38] <cradek> andypugh: I have a VM here. let me see if I can figure out how to uninstall whateveroffice without screwing the pooch.
[19:48:49] <CaptHindsight> we did a debian liveCD with coreboot and flashrom tools that fit on a CD a few, heh several years ago now
[19:49:25] <andypugh> cradek: Don’t worry about it. I only wanted the dev stuff to look at the problem that Deway just fixed :-)
[19:49:32] <cradek> aw jeez
[19:49:39] <cradek> dewey's awesome
[19:49:39] <greg> geared motor could be smaller if it matters
[19:49:47] <andypugh> He fixed the problem in less tome than it took me to install a dev system
[19:49:52] [qube] is now known as [cube]
[19:49:53] <__rob> yea, I ideally want it nema 8
[19:49:56] <__rob> or there abouts
[19:49:59] <__rob> I have a stepper at the moment
[19:50:10] <__rob> but even with 128 microstepping its not ultra smooth
[19:50:41] <__rob> thats already geared with a timing pulley 4:1
[19:50:41] <lair82> Ok, now I have that figured out, and now I know that my encoder FB is opposite of what it is doing, would it be proper to reverse the A with /A, B with /B and Z with /Z?
[19:50:44] <andypugh> __rob: A brushless servo with sinusoudal commutation from a high-count encoder
[19:50:54] <greg> servo motor
[19:51:01] <lair82> To get my FB reversed3
[19:51:12] <__rob> problem is I couldn't find servos cheap that did the resolution I wanted
[19:51:13] <CaptHindsight> andypugh:
https://wiki.debian.org/DamnSmallLinux
[19:51:20] <andypugh> lair82: Just put a negative number in the encoder scale in HAL.
[19:51:24] <__rob> I have a 17 bit encoder working with this
[19:51:25] <CaptHindsight> might be too small
[19:51:26] <__rob> already
[19:51:40] <__rob> so really I just want the geared motor part of the servo
[19:51:45] <lair82> AAAAHHHHHH, very nice, thank you andypugh
[19:51:56] <__rob> do they come without the encoder ?
[19:52:08] <greg> you can find them without
[19:52:19] <greg> maxon, faulhaber
[19:52:21] <__rob> I always assumed servo motor was including encoder
[19:52:21] <andypugh> A geared motor will introduce backlash. Does that matter?
[19:52:41] <__rob> and it was just a geared motor otherwise
[19:53:45] -!- mozmck [mozmck!~moses@67.210.159.245] has joined #linuxcnc
[19:53:46] <greg> technically I suppose, servo motors are generally rated differently and have no/little cogging.
[19:53:53] <cradek> andypugh: I removed libreoffice* and then did autoremove, and it freed 500MB and things still seem to work ok
[19:54:09] <__rob> right, any suggestions of any (quality) motors in that kind of size ?
[19:54:10] <__rob> or smaller
[19:54:25] <__rob> I really want to drive it like a bldc
[19:54:33] <__rob> not pwm or something
[19:54:34] <cradek> andypugh: oh wait I may have done a thing that affected it - starting again
[19:54:55] <greg> maxon or faulhaber, both do PMDC and BLDC
[19:54:58] <andypugh> I killed Brasero too, and VLC
[19:55:15] <andypugh> Not too clear what triggered the over-ambitious cleanup
[19:55:36] <CaptHindsight> I'd test your trimming down of debian for a while before you feel that it's ready
[19:55:42] <greg> what do you mena no pwm
[19:56:16] <__rob> well aren't most servos setpoint with a pwm to set the target position
[19:56:45] <__rob> rather then explicitly commutating the phases myself
[19:56:47] <__rob> to get it to move
[19:57:39] <greg> you can get drives which use step/dire, linear, or pwm signals
[19:57:41] <cradek> after removing libreoffice* vlc brasero, I still get a reasonable-looking autoremove
[19:57:54] <__rob> ahh ok
[19:58:18] <__rob> so whats the actual difference between a servo without encoder and bldc ?
[19:58:22] <__rob> something in the windings ?
[19:58:25] <greg> none
[19:58:59] <__rob> right, so just the gearing then ?
[19:59:07] <__rob> but the motor is the same
[19:59:16] <greg> could be used to do the same thing. servos are generally much lower rated, better insulation, skewed armature and expensive.
[19:59:31] <andypugh> cradek: Clearly you are more l33t in the pruning department
[19:59:51] <__rob> yea, only complete servos I found that had 17 bits of precesion or more were crazy expensive
[19:59:57] <greg> yeah
[20:00:02] <__rob> the actual encoder cost me £60 all in
[20:00:06] <cradek> andypugh: wonder what else you caught in your prune
[20:00:07] <__rob> with the disc
[20:00:34] <__rob> effectively making my own hi-res servo, but I want as much done as possible, so geared up would be ideal
[20:00:38] <__rob> this stepper is just not cutting it
[20:00:52] <andypugh> cradek: Well, had it been a hedge cutter, it would have been equivalent to at least a lower limb.
[20:01:26] <cradek> emc
[20:01:37] <andypugh> __rob: For the smoothest possible, you might want a resolver. But that would have to be second-hand from eBay
[20:01:39] <cradek> oops now everyone knows my password
[20:02:14] <andypugh> If that is your password, then there are lawyers who would like a word..
[20:02:16] <cradek> yeah after removing those 3 things, then doing autoremove, the install is 2.7 GB
[20:02:36] <cradek> (looks like my virtual disk is 4 GB)
[20:02:43] <__rob> andypugh, yea I need to make a few
[20:02:50] <__rob> so I need to be able to get more compontents
[20:02:53] <__rob> never heard of a resolver
[20:03:07] <cradek> build-dep linuxcnc says 523 MB
[20:03:43] <andypugh> That’s odd, the checkbuilddeps list installed 1.7GB
[20:04:17] <cradek> I bet this doesn't include build-essential
[20:04:27] <andypugh> __rob: Resolvers are analogue and absolute. Great for smooth commutation.
[20:05:04] <greg> I spent a bunch of time looking for nema23 size or smaller to replace a Maxon DC 28mm motor. Finally found a brushless. Now I need a drive to work with 7i77.
[20:05:16] <__rob> yea, well 17 bits should be enough
[20:05:38] <greg> what does this motor do?
[20:05:48] <andypugh> greg: what voltage?
[20:05:51] <greg> 48V
[20:06:25] <andypugh> I have some 24V brushless drives going spare. But you probably want to look on eBay for AMC
[20:06:54] <greg> I have a few AMC i bought some time ago before i knew about PWM input.
[20:07:53] <andypugh> cradek: I just booted from USB to install LinuxCNC / Debian, and it turns out I used the Lubuntu stick by mistake.
[20:07:55] <greg> 24V would work too.
[20:08:19] <cradek> oh ok, so my tests are invalid
[20:08:27] <andypugh> I probably shouldn’t be allowed near computers
[20:08:41] <__rob> andy, the motor turns :)
[20:08:42] <cradek> and maybe that's why it didn't fit in the first place - they probably have a lot more thingies
[20:09:04] <andypugh> cradek: No, I _was_ on Debian, but just put the wrong stick in for the reinstall attempt
[20:09:10] <__rob> but I basically want smooth movement and good position feedback
[20:09:15] -!- Akex_ has quit [Quit: Connection closed for inactivity]
[20:09:29] <__rob> not to worried about the motor being at pos X, as long as I know its as Y
[20:09:53] <greg> I installed 2.7pre a few months back on a 4GB CF from the iso, don't rember quite how big it ended up.
[20:10:39] <cradek> after removing those 3 things, autoremove, build-dep linuxcnc, the install is 3.5GB, 97% of my 4G disk
[20:12:42] <andypugh> That sounds good
[20:12:54] <andypugh> That’s excluding the docs package, I assume?
[20:13:12] <cradek> no, I let it do all the build-dep things it wanted
[20:13:26] <cradek> should be all that's needed to build the debs
[20:14:12] <__rob> andypugh,
http://www.micromo.com/products/brushless-dc-motors/brushless-dc-servomotors
[20:14:31] <__rob> so these motors it says "servo motor", presumably that is just he motor then, no encoder
[20:14:53] <__rob> looking at the rpm it seems to fast to be heavily geared
[20:15:24] <andypugh> Thord table lists encoder versions
[20:15:25] <greg> you can configure them with encoders or without, but if without makes you you have a shaft to mount one.
[20:15:42] <__rob> right, but what about gearing?
[20:15:50] <__rob> presumably they wont run very very slow
[20:16:20] <__rob> basically the best I've got so far was with a "gimbal motor" for RC quadcopters, I could run that extremely slow. but still had 'jerky' bits in it
[20:16:27] <__rob> so I think gearing is essential for hte speed I want to run
[20:17:01] <greg> also with(out) any ratio available, RPM also depends on the winding, several will be available.
[20:17:40] <__rob> really it seems my best option is any kind of bldc, 'servo' or otherwise
[20:17:44] <__rob> and a nice gearbox
[20:17:49] <__rob> something thats like 500:1
[20:18:46] <greg> what is your rpm?
[20:19:11] <__rob> maybe 0.1 slowest
[20:20:06] <andypugh> It really comes down to the toque you want
[20:20:17] <__rob> there is very little load
[20:20:24] <__rob> mabye 10grams
[20:20:50] <andypugh> Those motors have torques in the order of several mNm
[20:21:03] <greg> what was the problem with the gimbal motor?
[20:21:12] <andypugh> 10g isn’t a load, that’s a mass
[20:21:19] <__rob> I have a video at hand!
[20:21:20] <__rob> 1 sec
[20:21:24] <andypugh> Work out the torque you need
[20:22:26] <__rob> https://goo.gl/photos/JmkwVNwTVkqThuUh6
[20:22:50] <__rob> you can see it suddenly jumps a little bit
[20:24:02] <greg> how are you driving it?
[20:24:20] <__rob> thats with a microcontroller and a stm bldc driver
[20:24:31] <McBride36> RIP lathe bit
[20:24:40] <__rob> L6234
[20:24:51] <__rob> with sine wave style commutation
[20:24:56] <__rob> works ok
[20:25:09] <__rob> but its not ultra smooth
[20:25:31] -!- Tecan [Tecan!~fasdf@ip-216-234-182-80.wireless.tera-byte.com] has joined #linuxcnc
[20:25:31] -!- Tecan has quit [Changing host]
[20:25:31] -!- Tecan [Tecan!~fasdf@unaffiliated/unit41] has joined #linuxcnc
[20:25:41] <andypugh> Is that in closed-loop position control?
[20:25:53] <__rob> no, totally open loop
[20:26:11] <greg> hall sensors?
[20:26:12] <andypugh> Your solution is probably to close the loop (either position or velocity).
[20:26:12] <__rob> nope
[20:26:23] <__rob> I was just going to use the encoder
[20:26:24] <__rob> if it worked
[20:26:31] <__rob> rather then look at the backemf
[20:26:34] <__rob> or hall sensor
[20:26:42] <__rob> but, it didn't seem smooth enuf at first test
[20:27:21] <__rob> so you think that could be smoother with a closed loop ?
[20:28:13] <__rob> also, it got pretty hot
[20:28:59] <greg> You are hoping the motor is perfect, it won't be.
[20:29:02] -!- archivist_herron has quit [Ping timeout: 244 seconds]
[20:29:14] <__rob> mabye reduction is the way forward then
[20:29:30] <__rob> divide the little errors down
[20:29:40] <greg> asymmetry in the motor will cause things like this
[20:30:25] <__rob> right, problem again is that its all a solved problem
[20:30:27] <__rob> for the right price
[20:30:38] <andypugh> I know that it would be smoother with closed loop
[22:06:11] -!- logger[psha] [logger[psha]!~loggerpsh@195.135.238.205] has joined #linuxcnc
[22:07:00] <duc> I wonder if the seller will fix the issue. The connectors are hard to buy alone
[22:09:29] <MrSunshine> kinda annoying that the translation from sketchup to fusion 360 ends up in circles becoming alot of flat faces .. :/
[22:10:43] <renesis> cylinders?
[22:11:06] <renesis> doesnt have some sort of stl resolution option?
[22:13:58] <MrSunshine> have to ask the person that gave me the models (im not the one converting from sketchup to brep)
[22:15:00] <MrSunshine> but every single hole in the pieces that is supposed to be round is split up in like 20 faces insted
[22:18:33] -!- Camaban has quit [Quit: Leaving]
[22:21:21] <SpeedEvil> http://imgur.com/gallery/VQTBd56 - on the earlier topic of deliveries.
[22:21:55] -!- Audioburn has quit [Ping timeout: 276 seconds]
[22:22:32] <andypugh> i would be so annoyed by that! He meant “of your roof”
[22:23:13] <andypugh> (I wonder if he meant to throw the parcel through the open window?)
[22:23:17] <SpeedEvil> likely
[22:24:23] <XXCoder> wow
[22:24:41] <andypugh> Yodel drivers get paid 45p per delivery, and have to supply their own fuel and vehicle..
[22:25:26] <SpeedEvil> andypugh: yeah - delivery can be broken.
[22:42:17] -!- jduhls has quit [Remote host closed the connection]
[22:43:51] <andypugh> I wish that Debian let you choose UID at setup time
[22:44:27] -!- [cube] has quit [Ping timeout: 265 seconds]
[22:45:32] -!- [cube] [[cube]!~cube@204.237.15.88] has joined #linuxcnc
[22:45:41] amnesic_away is now known as amnesic
[22:50:25] -!- chillly has quit [Quit: Ex-Chat]
[22:53:49] -!- chris_99 has quit [Quit: Leaving]
[22:54:30] -!- Komzpa has quit [Ping timeout: 240 seconds]
[22:57:52] -!- sumpfralle [sumpfralle!~lars@erina.opennet-initiative.de] has joined #linuxcnc
[22:58:57] -!- erictheise has quit [Quit: erictheise]
[23:02:44] <yasnak> that new citizen k16e smell. mmm.
[23:04:48] <andypugh> so, I try adduser andypugh sudo and Debian says “The user andypugh does not exist”. Am I missing something?
[23:05:22] <XXCoder> caps?
[23:05:29] -!- justanotheruser has quit [Ping timeout: 276 seconds]
[23:05:47] <andypugh> I have a number of hats. what are you getting at?
[23:05:59] -!- justanotheruser [justanotheruser!~Justan@unaffiliated/justanotheruser] has joined #linuxcnc
[23:06:07] <XXCoder> no, not hats
[23:06:14] <XXCoder> CAPS and caps
[23:06:19] <XXCoder> capitalizion
[23:07:14] -!- sumpfralle has quit [Ping timeout: 250 seconds]
[23:09:19] <andypugh> What would I capitalise?
[23:09:37] <andypugh> AdUsEr AndyPugh?
[23:09:41] <XXCoder> dunno what do you use to login?
[23:09:46] <andypugh> root
[23:09:55] <XXCoder> do you just login andypugh?
[23:10:02] <andypugh> I want to
[23:10:03] <XXCoder> oh you havent created user?
[23:10:27] <XXCoder> make user then make it sudoer, sudo enable must have user exist first :)
[23:10:44] <XXCoder> though I dont even remember create user command lol
[23:10:53] <jdh> adduser or useradd
[23:11:12] <andypugh> Exactly. I want to create a new user (andypugh) Debian reponds to “adduser andypugh sudo” with “the user andypugh does not exist"
[23:12:01] <XXCoder> http://linux.die.net/man/8/adduser
[23:13:20] <JT-shop> goodnight
[23:13:43] <XXCoder> do adduser -D andypugh
[23:13:49] <XXCoder> then adduser andypugh sudo
[23:14:01] <XXCoder> oops
[23:14:07] <XXCoder> do useradd -D andypugh
[23:18:32] -!- PetefromTn_ [PetefromTn_!~IceChat9@75-136-59-160.dhcp.jcsn.tn.charter.com] has joined #linuxcnc
[23:19:50] <KimK_laptop> sudo adduser andypugh ?
[23:20:43] <XXCoder> KimK_laptop: nah hes logged as root
[23:20:57] <XXCoder> dangerous. lol
[23:21:38] <KimK_laptop> OK, just I'm kibitzing anyway, I just happened by. I'll move along now, lol.
[23:21:58] <XXCoder> there aren't droids you want. move on. move on.
[23:22:03] <KimK_laptop> s/just I'm/I'm just/
[23:28:42] -!- yasnak [yasnak!~yasnak@static-72-91-163-230.tampfl.fios.verizon.net] has parted #linuxcnc
[23:29:03] -!- Tecan has quit [Ping timeout: 255 seconds]
[23:30:02] -!- yasnak [yasnak!~yasnak@31.192.111.189] has joined #linuxcnc
[23:31:24] -!- Nick001-shop has quit [Quit: ChatZilla 0.9.92 [Firefox 39.0.3/20150806001005]]
[23:32:07] -!- zeeshan has quit [Read error: Connection reset by peer]
[23:36:19] -!- yasnak has quit [Quit: Leaving]
[23:36:41] -!- yasnak [yasnak!~yasnak@31.192.111.189] has joined #linuxcnc
[23:44:17] -!- erictheise has quit [Quit: erictheise]
[23:51:37] -!- jerryitt has quit [Quit: Connection closed for inactivity]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}