Back
[00:03:31] <zeeshan|2> hi friends
[00:04:29] <Sync> what up
[00:07:17] <zeeshan|2> modding the cnc mill
[00:07:56] <zeeshan|2> http://i.imgur.com/46vO9a9.jpg
[00:08:02] <zeeshan|2> it finally has a Z axis way cover
[00:08:03] <zeeshan|2> :D
[00:08:21] -!- Tom_L has quit [Quit: Leaving]
[00:08:29] <Wolf_> shiny
[00:12:23] <jthornton> finally got my recipe pages updated to HTML5 and CSS3 :)
[00:12:48] <_methods> welcome to the 2010
[00:12:49] <_methods> lol
[00:13:11] <jthornton> I don't want to get cut you know
[00:13:21] <_methods> google block you out
[00:13:31] <_methods> you go ssl
[00:13:39] <_methods> hehe
[00:13:57] <jthornton> what you mean jellybean
[00:14:06] <Tom_itx> JT-Shop, you need more links on your page
[00:14:15] <jthornton> which page
[00:14:22] <Tom_itx> like the log splitter and other things you've built
[00:14:44] <jthornton> still working on getting a cron job to upload my photos at night
[00:14:52] <jthornton> working on that as we type
[00:15:14] <Tom_itx> is it stacking wood for you yet?
[00:15:35] <jthornton> no, but maybe a robot arm could run the splitter for me
[00:16:44] <_methods> you need to get one of those clay pigeon launcher arms and attach it to the end where the logs split
[00:16:56] <_methods> and it flings the firewood into a stack
[00:17:14] <jthornton> I have one, what a good idea
[00:17:18] <_methods> hahah
[00:20:36] -!- patrickarlt has quit [Remote host closed the connection]
[00:24:33] -!- AR_ [AR_!~AR@24.238.81.234.res-cmts.sth2.ptd.net] has joined #linuxcnc
[00:33:39] -!- skunkworks [skunkworks!~chatzilla@str-broadband-ccmts-ws-26.dsl.airstreamcomm.net] has joined #linuxcnc
[00:35:32] -!- bilboquet [bilboquet!~bilboquet@95-210-222-40.ip.skylogicnet.com] has joined #linuxcnc
[00:43:28] amnesic is now known as amnesic_away
[00:43:44] amnesic_away is now known as amnesic
[00:45:41] -!- PetefromTn_ [PetefromTn_!~IceChat9@75-136-59-160.dhcp.jcsn.tn.charter.com] has joined #linuxcnc
[00:49:58] -!- JT-Shop has quit [Ping timeout: 260 seconds]
[00:50:00] -!- jthornton has quit [Ping timeout: 250 seconds]
[00:50:59] -!- rob_h has quit [Ping timeout: 250 seconds]
[00:53:59] -!- gonzo_nb has quit [Remote host closed the connection]
[01:02:24] -!- jfigie [jfigie!~zephyr@cpe-65-26-60-4.wi.res.rr.com] has joined #linuxcnc
[01:03:43] -!- Loetmichel [Loetmichel!~cylly@p54B11125.dip0.t-ipconnect.de] has joined #linuxcnc
[01:05:23] -!- Loetmichel2 has quit [Ping timeout: 246 seconds]
[01:06:08] -!- bilboquet has quit [Remote host closed the connection]
[01:10:37] <zeeshan|2> PetefromTn_: how goes the machining of that 3 rotor
[01:10:38] -!- andypugh has quit [Quit: andypugh]
[01:11:02] <PetefromTn_> aah have not even started it yet
[01:13:22] <zeeshan|2> i got a z way cover man
[01:13:23] <zeeshan|2> finally
[01:13:30] <zeeshan|2> stupid expensive and had to come from germany
[01:13:53] <PetefromTn_> I am sure
[01:14:02] <zeeshan|2> http://i.imgur.com/46vO9a9.jpg
[01:14:05] <zeeshan|2> way nicer though now
[01:14:10] <zeeshan|2> no more headache of getting crap on the way
[01:14:18] <zeeshan|2> and having to clean them vigorously after every job
[01:14:47] <PetefromTn_> they had a bit of a setback yesterday at work
[01:14:59] <zeeshan|2> what happened
[01:15:17] <PetefromTn_> they brought back that red car after it got a couple hundred road miles on it
[01:15:44] <PetefromTn_> and the owner wanted to get a bit more streetable tune tentative tune on it
[01:15:53] <PetefromTn_> so they put er on the dynojet
[01:16:02] <zeeshan|2> i know where this is going
[01:16:02] <PetefromTn_> and while they were making a pull
[01:16:06] <zeeshan|2> apex seal out
[01:16:16] <PetefromTn_> one of the fuel pumps ground broke somehow
[01:16:27] <PetefromTn_> and the car leaned out pretty good
[01:16:34] <PetefromTn_> apex seals are fine
[01:16:42] <PetefromTn_> all seals actually were fine
[01:16:49] <PetefromTn_> but the motor detonated
[01:17:04] <zeeshan|2> rotaries can't take a single detonation effect
[01:17:08] <zeeshan|2> there is damage
[01:17:10] <zeeshan|2> just dont know it yet
[01:17:15] <PetefromTn_> we pulled it apart today
[01:17:16] <zeeshan|2> compression will be low on one rotor
[01:17:20] <PetefromTn_> it was
[01:17:26] <zeeshan|2> that means a cracked apex seal
[01:17:31] <PetefromTn_> we looked at the rotors
[01:17:34] <PetefromTn_> seals were fine
[01:17:46] <PetefromTn_> the rotors face has a big dent in it now
[01:17:55] <PetefromTn_> both of them actually
[01:18:07] <PetefromTn_> the pressure actually deformed the face of the rotor
[01:18:25] <zeeshan|2> hm
[01:18:29] <PetefromTn_> the good news is that ALL SEALS survived the catastrophe
[01:18:38] <PetefromTn_> and the irons are undamaged
[01:18:50] <PetefromTn_> the cylinders appear to be fine
[01:19:16] <PetefromTn_> they also found out that the peripheral port job they had some other shop do
[01:20:13] <PetefromTn_> where they insert aluminum tubes thru the cylinders to the rotor cavity and seal with an oring and JB weld
[01:20:33] <PetefromTn_> were weeping coolant into the combustion chamber
[01:20:49] <PetefromTn_> so it was NOT a good day over there today
[01:21:27] <PetefromTn_> I will probably have to machine some new rotors for them and then they will have to send them out for balancing etc.
[01:21:41] -!- patrickarlt has quit [Remote host closed the connection]
[01:21:51] <PetefromTn_> the car has so much fuel going in it takes 2 seperate high flow fuel pumps
[01:22:05] <zeeshan|2> pretty typical on a car making 500+hp
[01:22:06] <PetefromTn_> loosing one was enough to lean it out
[01:22:09] <zeeshan|2> you usually gotta go duals
[01:22:37] <zeeshan|2> how does a ground fail
[01:22:38] <PetefromTn_> and as you well know ANY car that is turbo/blown cannot take a lean condition during a pull...
[01:22:40] <zeeshan|2> makes no sense
[01:22:43] <PetefromTn_> I dunno
[01:22:47] <zeeshan|2> that's not true
[01:22:49] <PetefromTn_> but that is what happened
[01:22:54] <zeeshan|2> a piston engine can take a more more than one deotnation event
[01:22:56] <zeeshan|2> before letting go
[01:22:58] <zeeshan|2> rotary goes on the first event
[01:23:03] <zeeshan|2> no matter how big or how small it is
[01:23:23] -!- zuri has quit [Quit: Leaving.]
[01:23:38] <PetefromTn_> I have seen PLENTY of pistons and rods bent and broken from leaning out
[01:23:54] <zeeshan|2> pete sigh
[01:23:55] <zeeshan|2> lol
[01:23:58] <PetefromTn_> it sucks
[01:24:03] <PetefromTn_> but what are you gonna do
[01:24:18] <PetefromTn_> just glad nothing really catastrophic happened
[01:24:25] <zeeshan|2> it is pretty catastrophic
[01:24:29] <zeeshan|2> if you had to take the motor apart
[01:24:34] <PetefromTn_> it could have blown the rotor and destroyed the cases
[01:24:42] <PetefromTn_> naah
[01:24:51] <PetefromTn_> cars like this trying to make 1k
[01:25:03] <PetefromTn_> it is hit or miss sometimes
[01:25:57] <PetefromTn_> I know you have a low opinion of the rotaries
[01:26:06] <PetefromTn_> so I am not surprised by your comments
[01:26:09] <zeeshan|2> i've built enough
[01:26:12] <zeeshan|2> and dealt with enough
[01:26:14] <zeeshan|2> and tuned enough
[01:26:18] <zeeshan|2> i used to do it professionally
[01:26:34] <zeeshan|2> so that is why my opinion is the way it is
[01:26:41] <PetefromTn_> they have built quite a few since I have been there
[01:26:50] <PetefromTn_> most are just street cars
[01:26:53] <zeeshan|2> they never last more than 15,000 miles
[01:26:55] <PetefromTn_> making sub 500hp
[01:26:59] <zeeshan|2> if they're pushing more than 450hp
[01:27:13] <zeeshan|2> even in the most perfect setup, they start losing compression
[01:27:23] <PetefromTn_> the red car actually had been makine 750hp before
[01:27:34] <zeeshan|2> on what a dynojet?
[01:27:35] <PetefromTn_> he drove it for like 2 years
[01:27:40] <zeeshan|2> thats like 400 on a regular dyno
[01:27:40] <PetefromTn_> yeah dynojet
[01:27:48] <PetefromTn_> oh okay
[01:28:05] <zeeshan|2> true test is what did it run on the 1/4 mile
[01:28:09] <zeeshan|2> if its making 750hp
[01:28:12] <zeeshan|2> it should be running high 8's
[01:28:14] <zeeshan|2> to low 9's
[01:28:32] <PetefromTn_> youre kidding right
[01:29:05] <zeeshan|2> no.
[01:29:24] <PetefromTn_> well whatever
[01:29:26] <zeeshan|2> its simple math and traction
[01:29:28] <PetefromTn_> it is what it is
[01:29:47] <zeeshan|2> 2500 race weight, 400rwhp runs high 10s
[01:29:55] <zeeshan|2> at around 125 mph
[01:30:22] <PetefromTn_> so every car that makes 400hp will run 10's then?
[01:30:28] <zeeshan|2> if its 750hp and has not much traction in first and second, then it'll run low 10s at 135 mph
[01:30:31] <zeeshan|2> the trap gives it away
[01:30:43] <zeeshan|2> 135-145
[01:30:53] <zeeshan|2> if it's rwd and 2500lb
[01:30:54] <zeeshan|2> yes
[01:31:01] <zeeshan|2> and has traction in all gears
[01:31:23] <PetefromTn_> you love that the car had a problem huh
[01:31:23] <Sync> PetefromTn_: you could have built in some more sensors to keep the engine alive when that happens
[01:31:33] <zeeshan|2> not really
[01:31:36] <zeeshan|2> it means more money for you
[01:31:44] <zeeshan|2> and that is a good thing!
[01:31:51] <PetefromTn_> Sync the car runs a Haltec standalone
[01:32:05] <PetefromTn_> this happened in seconds during a pull
[01:32:05] -!- zuri has quit [Remote host closed the connection]
[01:32:08] <zeeshan|2> Sync: i advocated a long time ago
[01:32:14] <naja452> Hey all.
[01:32:16] <zeeshan|2> that ever rotary absolutely needs a pressure tranducer on it
[01:32:21] <zeeshan|2> for both rotors
[01:32:23] <zeeshan|2> to prevent det damage
[01:32:30] <Sync> two sensors on both fuel lines ;)
[01:32:39] <malcom2073> All the sensors everywhere!
[01:33:15] <zeeshan|2> fuel pressure sensors have no where as good response time as a pressure tranducer designed for combustion events
[01:33:16] <Sync> PetefromTn_: yeah, not sure what it can do, but I'd just have two analog monitors that look at the fuel pressure
[01:33:17] <PetefromTn_> I am kinda surprised at your comments zeeshan especially if you have built many cars as you say
[01:33:25] <zeeshan|2> PetefromTn_: you need pics as proof?
[01:33:30] <zeeshan|2> =D
[01:33:32] <PetefromTn_> of what?
[01:33:38] <zeeshan|2> of all the rotaries ive built?!
[01:33:44] <zeeshan|2> from 3 rotors and 2 rotors
[01:33:49] <PetefromTn_> I don't need any proof
[01:33:58] <Sync> zeeshan|2: don't need no bandwidth
[01:34:11] <zeeshan|2> i built engines starting when i was 16!!
[01:34:14] <Sync> if the pressure dips below n bar for more than 10ms, kill it
[01:34:16] <zeeshan|2> all the way ttill 26!!
[01:34:17] <PetefromTn_> but if you have built them and as you say have had failures I am just surprised at your comments
[01:35:15] <Sync> tune muh 4g63t zeeshan|2 :3
[01:35:21] <zeeshan|2> sync gimme aem ems
[01:35:33] <Sync> that's not pro
[01:35:34] <PetefromTn_> I could have lied and told you rosy stories of awesome power but instead I told the truth and you just bash away at it...
[01:35:37] <Sync> I can give you a pectel
[01:35:48] <zeeshan|2> PetefromTn_: no matter how good of a story you'll tel lme
[01:35:49] <naja452> So what's the general consensus on rack and pinion drive for a CNC router gantry?
[01:35:54] <zeeshan|2> itll never change my opinion about rotaries
[01:35:59] <zeeshan|2> they are a waste of money, and they always will be in my eyes
[01:36:04] <zeeshan|2> no matter how much 10000whp it's making
[01:36:07] <PetefromTn_> never tried to change your opinion
[01:36:18] <PetefromTn_> could not care to
[01:36:34] <zeeshan|2> sync i got some pics coming for you
[01:36:43] <zeeshan|2> but i warn, they are on photobucket
[01:36:47] <zeeshan|2> they will rape your bandwidth
[01:36:53] <PetefromTn_> but as someone who has built cars and knows the ups and downs I guess I just expected more from you.
[01:37:03] <zeeshan|2> there are no ups with a rotary
[01:37:08] <zeeshan|2> i take that back
[01:37:08] <PetefromTn_> BS
[01:37:10] <zeeshan|2> the upers are temporary
[01:37:13] <zeeshan|2> for 15,000 km
[01:37:13] <zeeshan|2> :D
[01:37:36] <PetefromTn_> ya know what
[01:37:40] <PetefromTn_> it was not my car
[01:37:44] <PetefromTn_> it was not my motor
[01:37:48] <PetefromTn_> its not my business
[01:37:49] <malcom2073> lol
[01:37:56] <PetefromTn_> what happened was not my fault
[01:38:02] <PetefromTn_> but I STILL felt terrible for them
[01:38:17] <zeeshan|2> http://s130.photobucket.com/user/turbozee84/media/null_zps2ec8671f.jpg.html?sort=3&o=203
[01:38:22] <zeeshan|2> dual fuel pumps yo!
[01:38:26] <PetefromTn_> as I would no matter what kind of motor went in the car
[01:39:12] -!- micges has quit [Quit: Wychodzi]
[01:39:17] <zeeshan|2> it does suck after you put a lot of hard to work into it
[01:40:01] <Sync> well, failures are part of the game
[01:40:28] <PetefromTn_> failures ARE part of the game when building high HP cars that much is a given
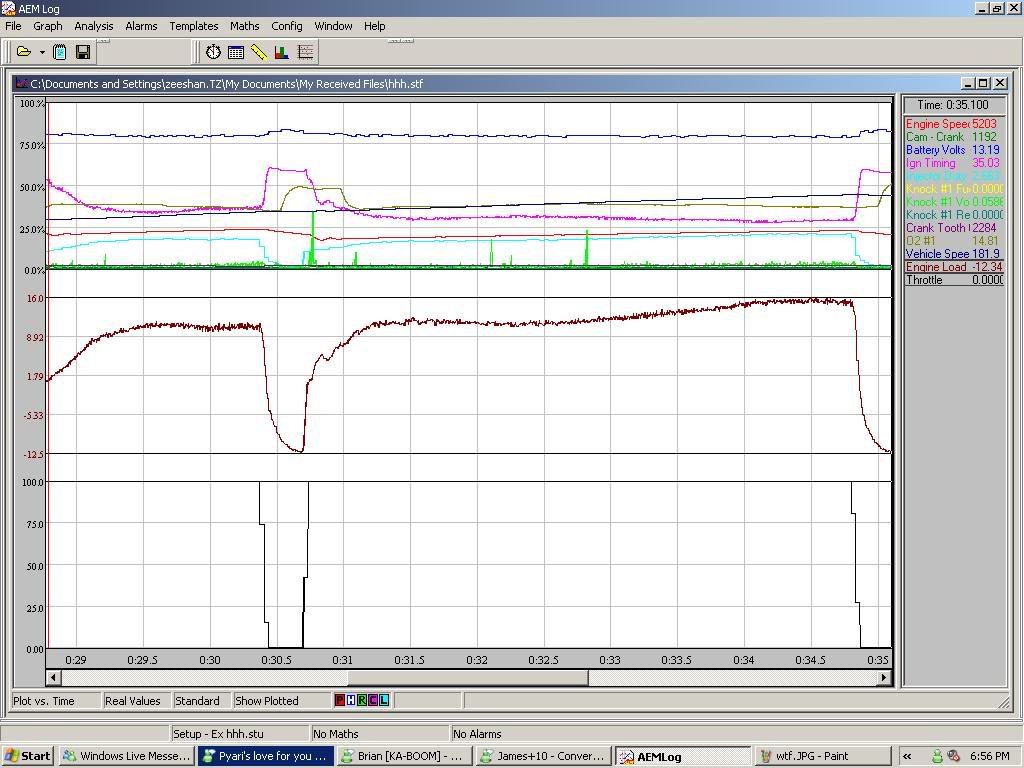
[01:40:29] <zeeshan|2> http://i130.photobucket.com/albums/p252/turbozee84/wtf2.jpg
[01:40:31] <zeeshan|2> wow this pic is ancient
[01:40:42] <zeeshan|2> can you tell whats going on sync
[01:41:46] <Sync> huh, need to figure out what is what
[01:41:57] <zeeshan|2> lol i dunno why i was plotting crank trigger there
[01:42:11] <zeeshan|2> 16psi!!
[01:43:16] <Sync> no idea
[01:43:24] <zeeshan|2> just doing runs
[01:43:28] <zeeshan|2> and monitoring knock and o2
[01:43:33] <Sync> yeah
[01:43:36] <Sync> looks like it
[01:43:54] <Sync> PetefromTn_: also applies to racecars in general
[01:44:14] <zeeshan|2> man i was tuning this rotary once
[01:44:19] <Sync> I hated it when one of our drivers pancaked the wall hard because my dumb lca broke
[01:44:30] <zeeshan|2> afrs were 11.2:1
[01:44:42] <zeeshan|2> timing was excellent, drove it around great
[01:44:49] <zeeshan|2> got some gas
[01:44:50] <Sync> especially because we worked our balls off to get the car out to quali since it was crashed in FP
[01:44:58] <zeeshan|2> wide open throttled it, and i heard it right away
[01:45:04] <zeeshan|2> the dreaded 1 rotor noise, checked the log
[01:45:07] <zeeshan|2> 1 detonation event
[01:45:41] <zeeshan|2> Sync: as long he didnt pancake himself!
[01:46:40] <Sync> sure
[01:46:53] <zeeshan|2> PetefromTn_: for what its worth
[01:46:54] <Sync> but that's pretty unlikely in that car
[01:47:03] <zeeshan|2> and im telling you this because i dont want you to go throug hthis
[01:47:11] <zeeshan|2> but becareful if someone asks you to bridgeport their engine
[01:47:29] <zeeshan|2> it becomes wayyyy to thin and is a ticking timebomb
[01:47:58] <Sync> but dem inertiaaaaa
[01:48:11] <Sync> zeeshan|2: did you see my mitsu fubar screws?
[01:54:15] <CaptHindsight> naja452: they tend to make sense when the travel is too long for a ballscrew
[01:55:31] <CaptHindsight> naja452: some use 2 servos with one preloading the other to keep lash as low as possible
[01:57:15] <zeeshan|2> no
[01:57:15] <PetefromTn_> zeeshan|2 there are MANY many bridgeported cars running around
[01:57:24] <zeeshan|2> REALLY PETE?
[01:57:27] <zeeshan|2> tell about some!!
[01:57:41] <PetefromTn_> what do you want me to say
[01:57:48] <zeeshan|2> i want you to prove your statement
[01:57:55] <zeeshan|2> about the MANY bridgeport cars you know of!
[01:57:59] <zeeshan|2> there's SO MANY!!
[01:58:00] <CaptHindsight> whats a bridgeported car? A car welded to a bridgeport?
[01:58:01] <zeeshan|2> so lets see even one?
[01:58:10] <PetefromTn_> there are quite a few local here
[01:58:18] <zeeshan|2> whats a bridgeport?
[01:58:48] <PetefromTn_> CaptHindsight a bridgeported rotoray motor
[01:59:02] <zeeshan|2> CaptHindsight:
http://www.mazdarotary.net/images/tech_pics/portbdg.jpg
[01:59:03] <PetefromTn_> is a motor than has a port with two holes in the irons
[01:59:05] <zeeshan|2> it's this retarded shit
[01:59:11] <zeeshan|2> with like a 2mm bridge between em
[01:59:12] <PetefromTn_> seperated by a thin sliver of metal
[01:59:15] <zeeshan|2> ready to snap off
[01:59:19] <PetefromTn_> for the seal to go over
[02:00:49] <PetefromTn_> http://i.imgur.com/ONMUl0I.jpg
[02:01:09] <PetefromTn_> looks like that
[02:01:18] -!- Loetmichel2 [Loetmichel2!~cylly@p54B11C36.dip0.t-ipconnect.de] has joined #linuxcnc
[02:01:35] -!- Loetmichel has quit [Ping timeout: 240 seconds]
[02:05:16] <PetefromTn_> I think I am done sharing car stuff we do at work here I will just try to stick to CNC conversation. it leads to too many arguments and animosity.
[02:06:32] <bz> do delta robots carry enough rigidity for milling stuff?
[02:07:06] <Sync> http://sync-hv.de/autowagens/cao/crack.jpg zeeshan|2
[02:07:18] <zeeshan|2> howd you manage that sync
[02:07:30] <zeeshan|2> never seen a bolt do that
[02:08:44] <malcom2073> Hmm, is there any kind of way oil (vactra #2 for instance) that can be had locally (hardware store type of stuff), or is that pretty much only in the realm of online-only sorta stuff?
[02:08:49] <Sync> straight from the package zeeshan|2
[02:08:58] <zeeshan|2> no malcom2073
[02:09:00] <malcom2073> bz: If you build them rigid enough, sure
[02:09:01] <Sync> malcom2073: visit your local lube dealer
[02:09:06] <zeeshan|2> Sync: wow
[02:09:14] <PetefromTn_> malcom2073 sometimes you can buy this stuff at auto parts suppliers
[02:09:40] <malcom2073> What am I looking for in terms of an oil?
[02:09:45] <zeeshan|2> "way lube"
[02:09:49] <zeeshan|2> its like hydraulic fluid
[02:09:52] <zeeshan|2> but has tackifiers
[02:09:59] <zeeshan|2> put some betewen you fingers
[02:10:03] <zeeshan|2> it comes apart like chewing gum
[02:10:07] <malcom2073> Sync: I'd like to find a lube dealer, but unsure if there are any near here, not that I've found :P
[02:10:14] <Sync> PetefromTn_: pfft, gotta develop a thicker skin on the interwobs
[02:10:16] <zeeshan|2> where are you?
[02:10:21] <malcom2073> zeeshan|2: East coast USA
[02:10:29] <zeeshan|2> thats a mighty big area :P
[02:10:37] <malcom2073> Shrewsbury, PA
[02:10:39] <Sync> usually regular heating oil suppliers can order stuff like that
[02:10:54] <zeeshan|2> dude
[02:10:56] <zeeshan|2> msc is in pa
[02:10:59] <malcom2073> Well if I'm gonna order it I can order it, wanted it before this weekend though so that's why I wanted to run around and find something
[02:11:00] <zeeshan|2> just order it from there?!: d
[02:11:07] <malcom2073> zeeshan|2: 2 hours away, I could do that
[02:11:22] <PetefromTn_> Sync maybe
[02:11:34] <zeeshan|2> malcom2073: i had a hard time finding in ain industrial town!
[02:11:35] <Sync> malcom2073: applied industrial?
[02:11:41] <zeeshan|2> i looked at various machine tool suppliers
[02:11:43] <zeeshan|2> none of them carried
[02:11:46] <zeeshan|2> then i found this awesome lube shop
[02:11:50] <zeeshan|2> which carries all sorts of lubes
[02:12:02] <zeeshan|2> i had to buy a 5 gallon pail, but it was only $65 cad
[02:12:30] <malcom2073> Sync: Does not look like the kind of place that has a walk-in store heh
[02:12:40] <Sync> does it have to?
[02:12:44] <Sync> just call them up
[02:12:51] <PetefromTn_> malcom2073 I don't know why you would not just order it online
[02:12:52] <zeeshan|2> 2 hours away kinda seems far :D
[02:12:53] <malcom2073> For me to walk in and buy something? yeah
[02:12:56] <malcom2073> PetefromTn_: I can
[02:13:02] <Sync> I guess nobody does industrial lubes retail
[02:13:07] <malcom2073> PetefromTn_: But I said earlier, I'd like to have it before this weekend
[02:13:08] <Sync> or rather with a big retail store
[02:13:11] <malcom2073> which means I'd have to pick it up somewhere
[02:13:14] <PetefromTn_> useenco sells that stuff pretty cheap
[02:13:16] <Sync> just call them and drive by
[02:13:29] <Sync> I just go to my shell rep
[02:13:34] <PetefromTn_> if you order it from Mcmaster carr you might have it by tomorrow afternoon
[02:13:43] <Sync> but we have a shell blend plant here
[02:13:45] <PetefromTn_> depending on where you are
[02:13:48] <zeeshan|2> its nice to go through the effort of finding that stuff locally
[02:13:52] <zeeshan|2> cause shipping is annoying to wait for
[02:14:12] <malcom2073> Yeah shipping is the tough part, iirc you have to ship that stuff ground
[02:14:38] <Sync> zeeshan|2: asked my mech prof about that shit
[02:14:47] <zeeshan|2> whatd he say
[02:14:49] <malcom2073> I'll call the MSC up, they don't carry very much in stock, but they might have that
[02:14:50] <zeeshan|2> forging fail?
[02:14:58] <Sync> he said that the plant does not have the process in line, they are quenching failures
[02:15:06] <Sync> apparently it is common to droplet spray the screws
[02:15:14] <CaptHindsight> when I was kid and wanted a V8 we had to weld 4 harley engines together (and they actually ran smoother that way)
[02:15:15] <Sync> and if you squirt them too hard, that happens
[02:15:18] <zeeshan|2> i believe it
[02:15:26] <zeeshan|2> now that you mention that
[02:15:30] <zeeshan|2> it does look like a quench failure
[02:15:35] <zeeshan|2> not a forging fail
[02:15:37] <Sync> yes
[02:15:50] <Sync> it is pretty obvious, but he was suprised that they went through QA
[02:16:00] <Sync> especially considering that they are a critical bolt
[02:16:15] <Sync> although the car industry does not really care for stuff like that
[02:16:29] <zeeshan|2> qa is a bunch of unskilled labor..
[02:16:36] <zeeshan|2> in my exp.
[02:16:45] <malcom2073> Now that you mentioned industrial lube, I looked that up there's a commercial industrial lube shop up in york, not too far
[02:16:49] <malcom2073> I'll try them too
[02:17:18] <Sync> he said, that for critical screws you usually have inline ultrasonics
[02:17:32] <Sync> VW does that for headbolts/blocks and cylinder heads
[02:17:46] <zeeshan|2> were those oem mitsu bolts?
[02:17:49] <Sync> you put in two probes, they do their magic and you know if it is good or not
[02:17:49] <Sync> yes
[02:17:53] <zeeshan|2> wow
[02:18:02] <zeeshan|2> unlike japanese quality..
[02:18:04] <zeeshan|2> interesting!
[02:18:16] <Sync> the ziploc says made in the netherlands
[02:18:44] <Sync> so maybe the dutch had too many energy cigs QAing them
[02:18:52] <zeeshan|2> lol
[02:19:08] <Sync> the dealer did not know what to say
[02:20:00] <Sync> these are 12.9 btw, used to mount the rear calipers
[02:20:10] -!- zeeshan [zeeshan!~kvirc64@CPE0018e7cea342-CM5039555db2cc.cpe.net.cable.rogers.com] has joined #linuxcnc
[02:20:49] -!- Jymmmm [Jymmmm!~jymmm@unaffiliated/jymmm] has joined #linuxcnc
[02:21:12] <Sync> I mean, what could possibly go wrong if they failed....
[02:21:19] <zeeshan> i missed some chat
[02:21:49] <Sync> the dealer did not know what to say
[02:21:52] <Sync> these are 12.9 btw, used to mount the rear calipers
[02:21:59] <zeeshan> ah
[02:23:41] -!- ibaca has quit [Ping timeout: 250 seconds]
[02:23:41] -!- varesa has quit [Ping timeout: 250 seconds]
[02:23:43] -!- evil_ren has quit [Ping timeout: 250 seconds]
[02:23:43] -!- zeeshan|2 has quit [Ping timeout: 250 seconds]
[02:23:44] -!- alex_joni has quit [Ping timeout: 250 seconds]
[02:23:45] -!- gavlee has quit [Ping timeout: 250 seconds]
[02:23:45] -!- Connor has quit [Ping timeout: 250 seconds]
[02:23:46] -!- Jymmm has quit [Ping timeout: 250 seconds]
[02:23:47] -!- jst_ has quit [Ping timeout: 250 seconds]
[02:23:47] -!- MrSunshine has quit [Ping timeout: 250 seconds]
[02:23:47] -!- xrr has quit [Ping timeout: 250 seconds]
[02:24:02] -!- jst [jst!~quassel@198.199.94.175] has joined #linuxcnc
[02:24:17] -!- alex_joni [alex_joni!~alex_joni@emc/board-of-directors/alexjoni] has joined #linuxcnc
[02:24:17] -!- mode/#linuxcnc [+v alex_joni] by ChanServ
[02:24:40] -!- MrSunshine [MrSunshine!~mrsun@c-393de253.4551536--62697410.cust.bredbandsbolaget.se] has joined #linuxcnc
[02:24:44] -!- xrr [xrr!~quassel@c21-76.uvn.zone.eu] has joined #linuxcnc
[02:24:50] -!- Sairon [Sairon!~jm@c-98-219-193-107.hsd1.pa.comcast.net] has joined #linuxcnc
[02:24:54] -!- varesa [varesa!~varesa@ec2-54-246-169-192.eu-west-1.compute.amazonaws.com] has joined #linuxcnc
[02:25:02] -!- renesis [renesis!renesis@cockgoblins.net] has joined #linuxcnc
[02:25:12] -!- gavlee [gavlee!~gavlee@poker.plus.com] has joined #linuxcnc
[02:25:22] -!- Connor [Connor!~Connor@c-67-187-108-117.hsd1.tn.comcast.net] has joined #linuxcnc
[02:30:07] <zeeshan> https://www.youtube.com/watch?feature=player_embedded&v=sOQMr-rwzu0
[02:30:11] <zeeshan> rofl i like this guys video title
[02:30:47] -!- patrickarlt has quit [Ping timeout: 246 seconds]
[02:35:33] <Sync> wot
[02:36:10] <Jymmmm> where be the car-ba-tat-or?
[02:36:33] Jymmmm is now known as Jymmm
[02:37:16] * Tom_itx sweeps the m's off the floor
[02:38:20] Jymmm is now known as Jymmmmmmmmmmmmmm
[02:38:58] -!- anth0ny has quit [Quit: anth0ny]
[02:40:43] Jymmmmmmmmmmmmmm is now known as Jymmm
[02:40:58] <Jymmm> Tom_itx: Now you have m&m&m&m's
[02:41:33] <Tom_itx> mmmm
[02:41:46] <Sync> nomnom
[02:44:18] <zeeshan> how is it already 10pm?
[02:44:43] <Tom_itx> it isn't
[02:44:50] <zeeshan> almost!
[02:46:37] <Sync> it is like 3:44 in the morning here
[02:46:49] <zeeshan> go to sleep1
[02:46:53] <zeeshan> man after all this rotary talk
[02:46:58] <zeeshan> i have an itch to build one
[02:47:04] <Sync> I can't
[02:47:07] <Sync> muh back hurts
[02:47:07] <zeeshan> why
[02:50:31] -!- jfigie has quit [Quit: Ex-Chat]
[02:52:51] <Jymmm> Sync: Lidoderm Patch
[02:53:38] <Sync> nah, actually not really back pain, just exhaustion
[02:54:53] <Tom_itx> hit your thumb with a big hammer and your back won't hurt anymore
[03:12:45] Sairon is now known as norias
[03:19:14] -!- Akex_ has quit [Quit: Connection closed for inactivity]
[03:31:15] -!- patrickarlt has quit [Ping timeout: 240 seconds]
[03:47:39] amnesic is now known as amnesic_away
[03:49:26] -!- duc has quit [Quit: Bye]
[03:50:01] -!- Duc [Duc!~Duc@42.sub-70-198-71.myvzw.com] has joined #linuxcnc
[03:50:04] -!- basiclaser has quit [Quit: Connection closed for inactivity]
[03:50:21] <Duc> Hello
[03:51:24] <Duc> How difficult would it be to write a driver for the Mechatronics-II protocol?
[04:01:26] -!- naja452 has quit [Ping timeout: 246 seconds]
[04:02:26] -!- dgarr has quit [Quit: Leaving.]
[04:11:56] -!- AR_ has quit [Ping timeout: 246 seconds]
[04:14:10] <renesis> whats mechatronics-ii prototocol?
[04:14:35] -!- PetefromTn_ has quit [Quit: I'm Outta here!!]
[04:16:09] -!- Tecan has quit [Ping timeout: 255 seconds]
[04:17:38] <Duc> its a open protocol for communcations to a servopack like ethercat but rs-485 based
[04:18:12] <renesis> neat
[04:22:05] -!- Duc has quit [Ping timeout: 246 seconds]
[04:32:10] -!- patrickarlt has quit [Ping timeout: 240 seconds]
[04:34:18] Audioburn is now known as Audioaway
[04:43:09] -!- naja452 [naja452!~androirc@24-197-250-43.dhcp.stpt.wi.charter.com] has joined #linuxcnc
[04:50:44] <jesseg> Tom_itx, ahh cool, thanks!
[05:22:06] -!- kanzure has quit [Ping timeout: 240 seconds]
[05:32:32] -!- knownasilya has quit [Quit: Connection closed for inactivity]
[05:32:37] -!- Contract_Pilot [Contract_Pilot!~Steven@c-73-180-48-246.hsd1.wa.comcast.net] has joined #linuxcnc
[05:35:04] -!- jdqx has quit [Remote host closed the connection]
[05:38:35] -!- fenn has quit [Ping timeout: 240 seconds]
[05:38:45] -!- fenn [fenn!~fenn@unaffiliated/fenn] has joined #linuxcnc
[05:44:14] -!- kanzure [kanzure!~kanzure@bryan.fairlystable.org] has joined #linuxcnc
[05:45:43] -!- kanzure has quit [Client Quit]
[05:46:04] -!- kanzure [kanzure!~kanzure@unaffiliated/kanzure] has joined #linuxcnc
[05:55:04] -!- kanzure has quit [Ping timeout: 250 seconds]
[05:55:29] -!- fenn has quit [Ping timeout: 276 seconds]
[05:56:28] -!- kanzure [kanzure!~kanzure@unaffiliated/kanzure] has joined #linuxcnc
[06:00:39] -!- fenn [fenn!~fenn@unaffiliated/fenn] has joined #linuxcnc
[06:02:40] -!- R2E4 [R2E4!~bob@modemcable164.157-20-96.mc.videotron.ca] has joined #linuxcnc
[06:06:49] <Contract_Pilot> Another busy, busy, day! Did get a DM8010 drive in today to fix got it done and tested and packaged for return.
[06:08:24] Audioaway is now known as Audioburn
[06:13:17] -!- ve7it has quit [Remote host closed the connection]
[06:16:32] <Contract_Pilot> Going to have to kill the ebay ad for repairs when i start my lcnc conversion and move away from mach.
[06:24:27] <Contract_Pilot> Then will have to set up a test axis.
[06:56:53] -!- kanzure has quit [Ping timeout: 244 seconds]
[06:57:35] -!- fenn has quit [Ping timeout: 260 seconds]
[06:57:42] -!- fenn [fenn!~fenn@unaffiliated/fenn] has joined #linuxcnc
[06:57:42] -!- kanzure [kanzure!~kanzure@unaffiliated/kanzure] has joined #linuxcnc
[06:59:44] -!- JesusAlos [JesusAlos!~Thunderbi@80.173.130.240.dyn.user.ono.com] has joined #linuxcnc
[07:03:03] -!- patrickarlt has quit [Remote host closed the connection]
[07:06:19] -!- amiri_ has quit [Ping timeout: 276 seconds]
[07:48:20] -!- JesusAlos has quit [Quit: JesusAlos]
[07:48:41] R2E4 is now known as R2E4_awy
[07:53:12] -!- Komzzpa has quit [Ping timeout: 244 seconds]
[07:57:30] -!- Deejay [Deejay!~Deejay@unaffiliated/dj9dj] has joined #linuxcnc
[07:57:41] <Deejay> moin
[08:03:47] -!- skunksleep has quit [Ping timeout: 264 seconds]
[08:10:41] -!- tannewt has quit [Quit: My Mac has gone to sleep. ZZZzzz…]
[08:13:05] -!- dan2k3k4 has quit [Ping timeout: 246 seconds]
[08:17:31] <Contract_Pilot> mon DJ
[08:17:45] <Contract_Pilot> well evning dj
[08:17:55] <Deejay> good morning (9 am here)
[08:17:57] <Contract_Pilot> been busy
[08:18:23] <Contract_Pilot> More terrorists that use ak-47 = more biz
[08:19:02] -!- patrickarlt has quit [Ping timeout: 244 seconds]
[08:24:44] <Contract_Pilot> 500 magazines in the last few days
[08:26:35] -!- toner_ has quit [Ping timeout: 240 seconds]
[08:26:44] -!- toner_ [toner_!ink@katsu.triplehelix.org] has joined #linuxcnc
[08:28:13] <Praesmeodymium> yeah thats a lot of work
[08:31:06] -!- tofu has quit [Read error: Connection reset by peer]
[08:42:46] -!- rob_h [rob_h!~robh@90.217.27.183] has joined #linuxcnc
[08:43:08] -!- dan2k3k4k5 has quit [Quit: Leaving]
[08:47:13] -!- Akex_ [Akex_!uid58281@gateway/web/irccloud.com/x-rtnxgllegoitjdpt] has joined #linuxcnc
[08:50:26] -!- Komzpa has quit [Ping timeout: 252 seconds]
[08:59:21] <gonzo___> they are talking about banning 'certain' semi auto rifles across europe
[09:00:26] <gonzo___> though in the UK they went years ago. Only smallbore SA left. And they will probably take the opertunity to ban them too
[09:03:20] <archivist> shotguns still too
[09:05:54] <gonzo___> there are noises coming from the police about section 1 shotguns
[09:06:47] <gonzo___> adding little extra requiorements (that are not actually law) to just make it too inconvenient to have
[09:19:35] -!- Audioburn has quit [Ping timeout: 240 seconds]
[09:19:55] -!- patrickarlt has quit [Ping timeout: 240 seconds]
[09:40:36] -!- bkboggy has quit [Quit: Leaving]
[09:57:55] -!- skunksleep [skunksleep!~AndChat14@str-broadband-ccmts-ws-26.dsl.airstreamcomm.net] has joined #linuxcnc
[10:04:42] -!- RoyBellingan [RoyBellingan!~roy@195.189.129.21] has joined #linuxcnc
[10:09:57] <Jymmm> (NSFW) Da Booty...
http://i.imgur.com/ZmdMlcd.jpg ( lair82, Tom_itx: your morning wakeup call as requested )
[10:20:35] -!- patrickarlt has quit [Ping timeout: 240 seconds]
[10:32:42] -!- Tecan [Tecan!~fasdf@unaffiliated/unit41] has joined #linuxcnc
[10:33:55] <ReadError> so.. question
[10:34:14] <ReadError> trying to use some loctite retaining compound that requires a anaerobic cure
[10:34:46] <ReadError> is there any way to emulate this in a jar or something?
[10:35:08] <ReadError> I know it would happen naturally if I used it properly
[10:54:24] -!- b_b has quit [Changing host]
[11:00:49] -!- Meduza89 [Meduza89!~meduza@addprofile.se] has joined #linuxcnc
[11:01:22] -!- Meduza has quit [Write error: Broken pipe]
[11:01:22] -!- malcom2073 has quit [Write error: Broken pipe]
[11:01:22] -!- os1r1s has quit [Excess Flood]
[11:03:11] -!- DaPeace has quit [Ping timeout: 246 seconds]
[11:03:37] -!- os1r1s [os1r1s!~os1r1s@mounicou.com] has joined #linuxcnc
[11:08:08] -!- skunksleep has quit [Ping timeout: 276 seconds]
[11:09:06] -!- JT-Shop [JT-Shop!~JT@172.242.222.19] has joined #linuxcnc
[11:09:11] -!- jthornton [jthornton!~jthornton@172.242.222.19] has joined #linuxcnc
[11:12:16] -!- skunksleep [skunksleep!~AndChat14@str-broadband-ccmts-ws-26.dsl.airstreamcomm.net] has joined #linuxcnc
[11:13:28] -!- jthornton has quit [Remote host closed the connection]
[11:15:17] -!- jthornton [jthornton!~jthornton@172.242.222.19] has joined #linuxcnc
[11:21:50] -!- patrickarlt has quit [Ping timeout: 260 seconds]
[11:24:31] <anomynous_> https://www.youtube.com/watch?v=Y2xv3XwOVaQ
[11:25:45] <SpeedEvil> ReadError: remove the obics
[11:25:59] <SpeedEvil> flush with argon, for example.
[11:32:34] -!- JesusAlos [JesusAlos!~Thunderbi@80.173.130.240.dyn.user.ono.com] has joined #linuxcnc
[11:52:02] -!- hsm [hsm!5f216961@gateway/web/freenode/ip.95.33.105.97] has joined #linuxcnc
[11:52:07] <hsm> Hello guys
[11:53:26] <hsm> what is the best way to control feed overdrive, rapid feet overdrive and spindle speed overdrive?
[11:53:38] -!- Valen has quit [Remote host closed the connection]
[11:54:08] <jthornton> I seldom use them
[11:54:56] <hsm> Is it a good plan to control them with 3 MPG handwheels? (TTL) over 7i77 encoder input?
[11:55:09] -!- skunkworks has quit [Ping timeout: 255 seconds]
[11:55:18] <jthornton> just depends on your needs
[11:55:20] <_methods> most real cnc's have 3 knobs to control those
[11:55:31] -!- logger[mah] has quit [Remote host closed the connection]
[11:55:45] <hsm> yes but i don´t want to control it in steps
[11:55:56] <jthornton> my "real" cnc's only one had a feed override knob
[11:56:09] <jthornton> just ask the real question
[11:56:30] <_methods> any recent cnc has spindle, feed and rapid override
[11:56:45] <hsm> yes this is what i want
[11:56:48] <jthornton> lol that lets me out then
[11:57:04] <XXCoder> yeah 3 knobs is good for those
[11:57:20] <hsm> why knobs? knobs = MPG?
[11:57:28] <XXCoder> spindle, g0 % override, and feed rate %
[11:57:33] <_methods> use a pot
[11:57:35] <hsm> yes
[11:57:37] <jthornton> no they could be encoders
[11:57:40] <_methods> or whatever the hell you want
[11:57:43] <XXCoder> yeah can be anything really
[11:57:44] -!- logger[mah] [logger[mah]!~loggermah@mah2.mah.priv.at] has joined #linuxcnc
[11:57:47] <_methods> sliders
[11:57:50] <_methods> buttons
[11:57:58] <_methods> a sting
[11:57:59] <_methods> string
[11:58:01] <_methods> lol
[11:58:05] <XXCoder> haas has 5 buttons, 0, 25, 50 75 and 100%
[11:58:13] <hsm> okay but i had read that potentiometer are bad for this
[11:58:18] <XXCoder> haas sucks
[11:58:21] <hsm> yes
[11:59:00] <XXCoder> best ones has 0% to 100% in 5% or less incerments
[11:59:08] <_methods> most people use incremental knobs for a reason
[11:59:23] <_methods> so they can calculate their new feed/spindle speed after adjustment
[11:59:32] <hsm> okay, I buy 3 MPGs
[11:59:36] <_methods> a nice defined 10,20,30.....%
[11:59:38] <XXCoder> honestly 5% is fine actually
[11:59:46] <XXCoder> do anyone need any finer resolution?
[11:59:48] <_methods> is easier to calculate than some random pot setting
[12:00:06] <lair82> Jymmm, where are you finding this shit?
[12:00:15] <XXCoder> google is your friend lol
[12:00:48] <hsm> if you have resonance vibrations you can fix it with fine steps under 5%
[12:00:52] <ReadError> SpeedEvil yea I was thinking a jar + gas to displace oxygen
[12:01:03] <lair82> True, but I looked at that imgur site, and don't find any nice shit like that!!!!!!!!!!!!!!!
[12:01:18] <ReadError> but dont have any good gas bottles here to use
[12:02:07] <hsm> I will buy 5 of these
http://www.ebay.de/itm/Hand-wheel-Pulse-Encoder-100PPR-CNC-Mill-Router-Manual-Control-For-CNC-System-20-/201087639110?hash=item2ed1c1de46:g:X34AAOxyi-ZTZo2m
[12:02:41] <anomynous_> 5?
[12:02:52] <XXCoder> hsm: dunno dont think that is best choice
[12:03:06] <XXCoder> can easily bump and turn it from 100% spindle to 0% while its running
[12:03:13] <hsm> jog z, jog x, feed override, rapid override, spindle override
[12:03:21] <anomynous_> +1 XXCoder
[12:03:45] <XXCoder> hsm: best is single one for both jogs with X or Z button or knob
[12:04:00] <XXCoder> unless you feel need to control both at once
[12:04:44] <hsm> what would you do?
[12:04:50] <XXCoder> hsm: look for "selector knob"
[12:04:57] <XXCoder> it has defined positons
[12:05:32] <XXCoder> you do need one pulse encoder for jogs but only one encoder needed
[12:06:16] <XXCoder> example
http://www.alibaba.com/product-detail/LW28-20A-25A-32A-63A-125A_60101251592.html?spm=a2700.7724857.29.190.cc5Adt
[12:06:29] <XXCoder> not best example but it shows what I mean
[12:06:40] <hsm> i want to build a cycle lathe with handwheels
[12:07:16] <anomynous_> pulse wheels dont have any feedback
[12:08:24] <anomynous_> you can just keep running it and its not any different based on feeding power used ;) Also it just is not... easy to use like handknobs in a manual lathe
[12:08:31] -!- logger[mah] has quit [Remote host closed the connection]
[12:09:31] <XXCoder> I dont know whats best for lathe, being mill machinist but yeah encoders isnt good idea for everything, just jog really
[12:09:52] <XXCoder> man I wanna get a encoder and build something ro control my machine as keyboard really sucks lol
[12:09:56] <XXCoder> anyway night
[12:10:45] -!- logger[mah] [logger[mah]!~loggermah@mah2.mah.priv.at] has joined #linuxcnc
[12:10:50] -!- boboss has quit [Ping timeout: 260 seconds]
[12:10:57] <anomynous_> its good for getting your zero maybe? =) Or driving it close to probe for measurement... or something like that
[12:11:26] <anomynous_> if you want hand wheels, use hand wheels. Or mdi. My opinion. Or just make a program.
[12:11:47] <hsm> okay i will use two encoders for jog and 3 selector knobs for override
[12:19:53] <hsm> is it possible to use only 2 button switches for override ? Every push on one button makes the override 5% higher or lower
[12:20:18] <hsm> because of the massive input wiring for selector knop with 12 positions
[12:20:48] -!- Tecan has quit [Ping timeout: 255 seconds]
[12:22:55] -!- patrickarlt has quit [Ping timeout: 240 seconds]
[12:25:13] <alex_joni> howdy all
[12:25:46] <Tom_itx> morning
[12:27:24] <hsm> hi
[12:29:23] <anomynous_> hsm, is it possible to use a potentiometer that has fixed positions and round the value?
[12:29:35] <anomynous_> i dont know if there are such potentiometers, but there probably are ;D
[12:30:09] <hsm> good idea
[12:31:12] <Tom_itx> 38�F A 4.7 earthquake woke up a lot of people in southern Kansas about 1:42 a.m
[12:32:11] -!- norias has quit [Ping timeout: 260 seconds]
[12:36:15] <anomynous_> only a pot may be unreliable
[12:36:16] <anomynous_> ;D
[12:37:51] * anomynous_ is thinking of the same thing that old stereos do when adjusting volyme
[12:39:05] <hsm> or i use quadratur encoder with just 20 positions
http://wiki.linuxcnc.org/cgi-bin/wiki.pl?Spindleoverride
[12:41:38] -!- skunksleep has quit [Ping timeout: 260 seconds]
[12:42:40] <hsm> but than i will have problems with indey point
[12:42:44] <hsm> *index
[12:59:10] gonzo___ is now known as gonzo_
[13:04:38] -!- Audioburn has quit [Ping timeout: 246 seconds]
[13:13:18] -!- mk0 [mk0!~Orr@fiztech.basnet.by] has joined #linuxcnc
[13:16:22] -!- automata_ [automata_!~automata_@114.143.63.33] has joined #linuxcnc
[13:22:44] -!- sumpfralle [sumpfralle!~lars@p20030059CE15EF00021CBFFFFEAF05DA.dip0.t-ipconnect.de] has joined #linuxcnc
[13:23:15] -!- patrickarlt has quit [Ping timeout: 240 seconds]
[13:26:56] -!- asdfasd [asdfasd!~332332@90.194.75.33] has joined #linuxcnc
[13:27:05] <anomynous_> index point?
[13:27:15] -!- il has quit [Ping timeout: 240 seconds]
[13:30:31] <anomynous_> or weld... i mean solder resistors to the override knob.... i mean... whatever a fancy name is
[13:30:33] <anomynous_> in series
[13:30:34] <anomynous_> ;D
[13:30:42] <anomynous_> and measure that
[13:31:53] <anomynous_> maybe i didnt think that through. Or maybe i did. dunno
[13:32:32] <archivist> dont need an index on a jog encoder
[13:33:01] amnesic_away is now known as amnesic
[13:33:11] Meduza89 is now known as Meduza
[13:34:56] <gonzo_> another stupidly simple question for you all.....
[13:35:12] -!- hsm has quit [Ping timeout: 246 seconds]
[13:35:54] * archivist hides
[13:36:39] <gonzo_> when the g code interpreter in axis gets the feedback position from the machine, will it use that to adjust the speed of movement on all axis and the rates that it runs througc commands
[13:36:59] <archivist> it does
[13:37:05] <gonzo_> or does the interpreter just spit out positional commands and it's the hal job to keep up?
[13:37:34] <archivist> they are all working together
[13:37:47] <archivist> except for stepper systems
[13:38:08] -!- chris_99 [chris_99!~chris_99@unaffiliated/chris-99/x-3062929] has joined #linuxcnc
[13:38:14] <anomynous_> http://1drv.ms/1SHtEUf i just drew this knob hack with my pro electronics design software.
[13:38:17] <gonzo_> ok. so if I have, for example, a slow X axis, and was cutting a diagonal, the feedback of the actual posn will be used to slow the Y axis too
[13:38:43] <archivist> it will correctly coordinate the move
[13:39:20] <archivist> anomynous_, use a better image hoster :)
[13:39:29] <gonzo_> ok, prob such a basig principal that it wasn;'t documented anywhere (not that I remem,ber)
[13:39:40] <gonzo_> additiona Q
[13:39:40] <anomynous_> archivist, it has a feature. If you go too fast or too slow, you have to change fuse.
[13:40:21] <gonzo_> foes the interpreter run in axis, or is that just the display prog that shows what is going on and has a few inputs
[13:40:25] <archivist> anomynous_, I get an crane image and a reminder to upgrade my browser....wtf
[13:40:31] <anomynous_> :/
[13:40:36] <anomynous_> its a png
[13:41:19] <archivist> gonzo_, that is a display mainly
[13:41:25] <anomynous_> http://1drv.ms/1I12e5W
[13:41:30] -!- tobias47n9e has quit [Ping timeout: 240 seconds]
[13:41:32] <anomynous_> that should be smaller. its jpg
[13:42:02] <archivist> that site is fsked, it is not your image
[13:42:07] <gonzo_> was wonderiong about the hal entry (example files) that sends the feedback from encoders to axis.something
[13:42:36] <gonzo_> does there also need to be a line that sends the feedback pos to the interpreter then?
[13:42:46] <archivist> badly named gui
[13:43:11] <archivist> an axis A has little relation to the gui called axis
[13:43:31] <gonzo_> ok
[13:43:50] <archivist> the motion controller is the part doing the work live
[13:44:32] <gonzo_> so the hal serts up paths/nets to the motion controller and that talks to the display prog?
[13:46:05] <archivist> hal is in between almost everything axis-hal-motion-hal-hardware
[13:50:25] -!- P1ersson [P1ersson!~P1ersson@cl-1054.sto-01.se.sixxs.net] has joined #linuxcnc
[13:53:03] <gonzo_> thought that was the case. but seeing things like:
[13:53:14] <gonzo_> net homeswitches => axis.0.home-sw-in
[13:53:26] <gonzo_> caused me to doubt myself
[13:56:58] -!- Tecan [Tecan!~fasdf@unaffiliated/unit41] has joined #linuxcnc
[13:58:23] -!- quiqua has quit [Quit: quiqua]
[13:58:32] -!- sumpfralle has quit [Ping timeout: 246 seconds]
[14:09:48] -!- exitcode1 [exitcode1!~exitcode1@unaffiliated/exitcode1] has joined #linuxcnc
[14:16:02] -!- naja452 has quit [Ping timeout: 246 seconds]
[14:16:26] -!- naja452 [naja452!~androirc@64.91.16.231] has joined #linuxcnc
[14:21:02] <Jymmm> (NSFW) lair82 Here's a bonus for you...
http://i.imgur.com/t21XbfG.jpg
[14:24:14] -!- DaPeace [DaPeace!~Adium@46.243.107.151] has joined #linuxcnc
[14:24:47] -!- patrickarlt has quit [Ping timeout: 264 seconds]
[14:25:27] -!- duc [duc!~AndChat40@2600:1015:b009:6817:0:1f:af90:8801] has joined #linuxcnc
[14:25:30] <archivist> gonzo_, and then you realise you can connect things in different ways with hal and its components, enabling things like hobbing machines
[14:27:28] <Jymmm> hobbing machines ???
[14:30:00] <archivist> a method of cutting gears
[14:30:11] <Jymmm> Ah, ok
[14:33:04] <Tom_itx> you hobbit
[14:33:18] <Jymmm> you troll =)
[14:36:59] <Jymmm> (Semi-NSFW) YAY for sweaters!
http://i.imgur.com/6JT9quJ.jpg
[14:37:28] <_methods> won't you be my neighbor
[14:37:37] <Jymmm> lol
[14:38:56] -!- mk0 has quit [Read error: Connection reset by peer]
[14:45:30] <Tom_itx> _methods is there an easy way to rotate parts around in an assembly to when setting their constraints?
[14:46:29] <Tom_itx> oops.. gotta run. check in later.
[14:51:46] <lair82> Jymm, again, where in the hell are you finding those? I looked around on that site, and nothing as nice as those could be found.
[14:52:52] <Jymmm> lair82: pornz, it comes free with the internetz ;)
[14:57:54] -!- a_morale has quit [Ping timeout: 260 seconds]
[14:59:07] <zeeshan> Tom_itx: middle mouse button
[14:59:10] -!- a_morale [a_morale!~quassel@2-227-115-13.ip186.fastwebnet.it] has joined #linuxcnc
[15:00:28] -!- eFuchs_mobil [eFuchs_mobil!~voodoo@qo013.physik.uni-ulm.de] has joined #linuxcnc
[15:01:01] <_methods> Tom_itx: not really, i usually just put a temporary constraint on parts to make them easier to move around
[15:01:12] <_methods> or get them facing the way i need them to make assembly easier
[15:01:41] -!- skunksleep [skunksleep!~AndChat14@str-broadband-ccmts-ws-26.dsl.airstreamcomm.net] has joined #linuxcnc
[15:05:24] x_ is now known as micges
[15:09:53] -!- skunkworks [skunkworks!~chatzilla@68-115-41-210.static.eucl.wi.charter.com] has joined #linuxcnc
[15:12:32] <zeeshan> man work is getting awesome here
[15:12:41] <zeeshan> im doing some serious FEA! :D
[15:19:09] amnesic is now known as amnesic_away
[15:19:54] <duc> zeeshan: one area where I wish I used at all for my ME degree
[15:25:20] -!- patrickarlt has quit [Ping timeout: 246 seconds]
[15:30:55] -!- anth0ny has quit [Quit: anth0ny]
[15:33:15] -!- benc_ [benc_!~benc@c-50-137-197-133.hsd1.mn.comcast.net] has joined #linuxcnc
[15:37:00] -!- richardsmd has quit [Ping timeout: 246 seconds]
[15:40:50] -!- automata_ has quit [Ping timeout: 260 seconds]
[15:49:55] -!- kwallace1 has quit [Ping timeout: 240 seconds]
[15:50:15] -!- Audioburn has quit [Ping timeout: 240 seconds]
[15:53:42] -!- ivansanchez has quit [Remote host closed the connection]
[16:05:05] -!- md-2 has quit [Quit: Leaving...]
[16:05:55] Audioburn is now known as Audioaway
[16:13:00] -!- automata [automata!~automata_@triband-mum-59.182.134.248.mtnl.net.in] has joined #linuxcnc
[16:24:46] -!- dan2k3k4 has quit [Quit: Leaving]
[16:34:01] -!- Tecan has quit [Quit: Live Long And Phosphor!]
[17:06:30] -!- Komzzpa has quit [Ping timeout: 240 seconds]
[17:06:58] -!- SpeedEvil has quit [Quit: No Ping reply in 180 seconds.]
[17:07:33] -!- SpeedEvil [SpeedEvil!~quassel@tor/regular/SpeedEvil] has joined #linuxcnc
[17:07:55] -!- Audioaway has quit [Ping timeout: 240 seconds]
[17:13:48] <Tom_itx> _methods, what i find is when 2 parts are facing each other it makes it hard to select the ajoining faces for a constraing
[17:13:49] <Tom_itx> t
[17:14:48] <Tom_itx> and i can't figure out how to get the rotate working when in the mate dialog
[17:15:21] <archivist> I select one, rotate/zoom/whatever select the other
[17:17:17] <archivist> iirc just use the outer area for the move/rotate
[17:17:57] <archivist> it just knows the context is rotate and not a face/edge
[17:19:31] <archivist> this is one of those things one is used to doing rather than explaining
[17:20:10] <Tom_itx> yeah
[17:20:59] <Tom_itx> when i have the mates dialog up though it won't let me rotate
[17:22:25] <archivist> and you can also use the top menu to do moves and rotates and the mate menu remembers where you are when you drop back out of the move/rotate
[17:22:48] <Tom_itx> i must not have enough toolbars showing then
[17:22:55] <archivist> not used it for a few months
[17:23:33] <archivist> yes adding your favourite tools is a must :)
[17:24:01] <Tom_itx> do you know what toolbar that's under? view?...
[17:25:00] <archivist> I would need to go and fire up the windows laptop
[17:25:20] <Tom_itx> view gets you the standard views but not dynamic rotate
[17:27:57] <Tom_itx> i guess i could have multiple viewports
[17:28:23] -!- Komzzpa has quit [Ping timeout: 276 seconds]
[17:29:05] <JT-Shop> use the arrow keys
[17:29:46] <Tom_itx> viewports will get it
[17:30:04] <Tom_itx> i'd forgotten about that
[17:30:38] -!- JesusAlos has quit [Quit: JesusAlos]
[17:30:46] <Tom_itx> do you generally do sub assemblies then have a main assembly or do it all in one?
[17:33:02] <archivist> depends on the job
[17:33:49] <JT-Shop> the more complex the machine the more sub assemblies I make
[17:34:17] -!- Nick001-shop [Nick001-shop!~chatzilla@50.39.54.233] has joined #linuxcnc
[17:34:26] -!- [cube] has quit [Ping timeout: 240 seconds]
[17:34:50] -!- KimK_laptop has quit [Ping timeout: 246 seconds]
[17:35:16] -!- Roguish [Roguish!~chatzilla@c-50-143-183-159.hsd1.ca.comcast.net] has joined #linuxcnc
[17:37:30] -!- JesusAlos [JesusAlos!~Thunderbi@80.173.130.240.dyn.user.ono.com] has joined #linuxcnc
[17:39:23] -!- [cube] [[cube]!~cube@bas17-ottawa23-1279418680.dsl.bell.ca] has joined #linuxcnc
[17:45:04] <renesis> tom_itx: i do it how i think it should be assembled
[17:45:36] <renesis> so if you were to build up a sub-assy before installing into something else, thats how i model it
[17:47:29] <Tom_itx> sounds reasonable
[17:47:44] <archivist> looks like I need to leave the laptop on charge to get it to fire up
[17:50:38] -!- KimK_laptop [KimK_laptop!~Kim@wsip-70-186-238-216.ks.ks.cox.net] has joined #linuxcnc
[17:53:06] -!- automata_ [automata_!~automata_@triband-mum-59.182.134.248.mtnl.net.in] has joined #linuxcnc
[17:53:38] -!- md-2 has quit [Remote host closed the connection]
[17:56:37] -!- jthornton has quit [Read error: Connection reset by peer]
[17:56:46] -!- mik_ has quit [Ping timeout: 240 seconds]
[17:56:53] -!- jthornton [jthornton!~jthornton@172.242.222.19] has joined #linuxcnc
[17:56:57] -!- JT-Shop has quit [Read error: Connection reset by peer]
[17:57:11] -!- automata has quit [Ping timeout: 244 seconds]
[17:57:42] -!- JT-Shop [JT-Shop!~JT@172.242.222.19] has joined #linuxcnc
[17:58:05] -!- patrickarlt has quit [Remote host closed the connection]
[18:00:53] -!- JT-Shop has quit [Read error: Connection reset by peer]
[18:00:53] -!- jthornton has quit [Read error: Connection reset by peer]
[18:01:00] -!- JT-shop [JT-shop!~JT@172.242.222.19] has joined #linuxcnc
[18:01:59] -!- jthornton [jthornton!~jthornton@172.242.222.19] has joined #linuxcnc
[18:04:06] <CaptHindsight> anyone have a good source that makes custom sanding belts ?
[18:04:44] <Tom_itx> i had a place in NY that makes buffing wheels etc for me. they also deal in abrasives so they might
[18:05:17] <_methods> Tom_itx: what do you mean it makes it hard to select the faces?
[18:05:41] <CaptHindsight> got am old custom belt sander recently that needs belts in various grits
[18:05:43] <_methods> sorry customer here
[18:05:46] <_methods> i'll bbiab
[18:05:53] <Tom_itx> np
[18:06:32] <Tom_itx> CaptHindsight,
http://www.divinebrothers.com/
[18:06:40] -!- naja452 has quit [Ping timeout: 252 seconds]
[18:06:45] <Tom_itx> maybe
[18:06:51] <CaptHindsight> _methods: you need to change the angle of the part to be able to select to faces that you want to mate if they are facing or opposite each other
[18:07:04] <CaptHindsight> to/the
[18:07:32] <Tom_itx> yeah, and i can't figure out how to use 'rotate view' when in the mates dialog
[18:08:57] <CaptHindsight> it depends on the CAD package, but I either have the button to freely rotate or some let you right click to get to a view menu
[18:09:12] <CaptHindsight> while in the mates dialog
[18:09:37] <CaptHindsight> Tom_itx: are you using SW?
[18:09:45] <Tom_itx> yeah
[18:09:51] -!- patricka_ has quit [Remote host closed the connection]
[18:10:14] <Tom_itx> i just opened 2 panes and got it done
[18:11:12] <CaptHindsight> I'm starting it up here
[18:11:44] -!- patrickarlt has quit [Ping timeout: 250 seconds]
[18:11:47] <Tom_itx> ^^ they may not do belts
[18:12:02] <CaptHindsight> they do
[18:12:13] <CaptHindsight> Met-L-Brasive® Belts
[18:12:48] <Tom_itx> ahh there it is..
[18:14:21] <CaptHindsight> Tom_itx: while in the mate dialog I click on the free rotate button and it lets me rotate to choose a surface currently not in view
[18:15:03] <Tom_itx> what toolbar is that on?
[18:15:21] <CaptHindsight> if the free rotate button is not already on your desktop then add it
[18:15:54] <CaptHindsight> http://help.solidworks.com/2013/English/SolidWorks/sldworks/t_rotate_view.htm they have info and a pic here
[18:16:15] -!- tannewt has quit [Quit: My Mac has gone to sleep. ZZZzzz…]
[18:18:38] <CaptHindsight> when I get anew version one of the first things I do is make sure that Pan, Rotate, Zoom etc is on my desktop
[18:18:56] <Tom_itx> seems like a must
[18:19:31] <CaptHindsight> you'd think it would come as default but you have to tweak a few things to make it easier to use
[18:20:12] <Roguish> get one of these. full 3D motions without the keyboard at all. works in ProeE, SW, MasterCam, Autocad......
http://www.3dconnexion.com/products/spacemouse/spacenavigator.html
[18:20:32] <archivist> a right click also brings up a context sensitive menu where it may be available too
[18:20:48] <Roguish> inexpensive too. only $100. worth every dollar.
[18:20:55] <Tom_itx> yeah my bud had one of those for acad or very similar to it
[18:23:07] <CaptHindsight> http://www.incredible-adventures.com/l-39/l-39-space03.jpg I have one of these I use as 3d mouse for full effect :)
[18:23:50] -!- Komzpa has quit [Ping timeout: 240 seconds]
[18:26:12] -!- patrickarlt has quit [Remote host closed the connection]
[18:28:54] <Tom_itx> how do you put those on a custom toolbar?
[18:29:16] <Tom_itx> i got em up top now
[18:30:01] <Tom_itx> in the command manager..
[18:30:25] -!- patrickarlt has quit [Remote host closed the connection]
[18:31:52] -!- patrickarlt has quit [Remote host closed the connection]
[18:32:24] -!- FinboySlick [FinboySlick!~shark@74.117.40.10] has joined #linuxcnc
[18:32:41] <Tom_itx> yeah that's alot better
[18:34:57] -!- md-2 has quit [Remote host closed the connection]
[18:39:17] -!- kb8wmc [kb8wmc!~kb8wmc@64.25.194.29] has joined #linuxcnc
[18:43:37] -!- patrickarlt has quit [Remote host closed the connection]
[18:48:03] -!- naja452 [naja452!~androirc@96-42-61-71.dhcp.eucl.wi.charter.com] has joined #linuxcnc
[18:50:58] <lair82> Hey Guys, just wondering, I have a 7i49 driving my new servo drive from Automation direct, and when I start Linuxcnc up, before I do anything I looked at the pwmgen value, and it is showing me -6.9 MVDC. Is there any way to actually get that to zero? I tried the adjusting the BIAS, but I cannot get it to a true zero.
[18:52:46] <lair82> The drive is reacting to this, and moving the servo. If I put a 7mv offset in the drive, it almost comes to a halt, but still creeps, very, very slowly.
[18:53:47] <pcw_home> small motion is expected (Even if you zero the motion it will still drift as temperature changes)
[18:54:12] -!- Tom_L [Tom_L!~Tom@ip68-102-196-26.ks.ok.cox.net] has joined #linuxcnc
[18:54:13] -!- Tom_L has quit [Changing host]
[18:54:13] -!- Tom_L [Tom_L!~Tom@unaffiliated/toml/x-013812] has joined #linuxcnc
[18:54:26] -!- jduhls has quit [Ping timeout: 240 seconds]
[18:55:11] -!- Tecan [Tecan!~fasdf@ip-216-234-182-80.wireless.tera-byte.com] has joined #linuxcnc
[18:55:11] -!- Tecan has quit [Changing host]
[18:55:11] -!- Tecan [Tecan!~fasdf@unaffiliated/unit41] has joined #linuxcnc
[18:55:15] <pcw_home> The fix is not to enable the drives until LinuxCNC is running and the PID loop is in control
[18:55:54] <pcw_home> (this is also a safety issue)
[18:55:59] <lair82> Linuxcnc is running, and using the PID loop,
[18:56:36] <lair82> Halmeter shows "0" for the value, but the actual reading at the Aout is -6.9 MV
[18:57:19] <lair82> Right now I only have a 1 for the P and a 1 for the FF1
[18:57:35] <pcw_home> That should be fine (the drives should not creep when however)
[18:58:44] <pcw_home> should not creep when PID is enabled I should say, creeping means the loop is not closed
[18:58:53] <lair82> If I enter the opposite voltage into the drive offset parameter it almost completely stops
[18:59:06] -!- naja452 has quit [Ping timeout: 252 seconds]
[18:59:28] <lair82> The DRO on the screen is moving up and down for the axis
[19:00:14] <lair82> I am not sure on the scale yet ( haven't made it that far) but is does corellate with the servo rotation
[19:00:20] <pcw_home> is motion about right
[19:00:55] <pcw_home> dont worry about MV offsets, they are not an issue
[19:01:33] <pcw_home> continuous creeping means the feedback loop is not closed
[19:01:37] <lair82> The servo drive/motor is operating properly per their directions, I guess maybe in general it is opposite of what linuxcnc is expecting maybe?
[19:03:58] <pcw_home> is this a PNCCONF created config?
[19:04:12] <lair82> Nope
[19:04:41] <lair82> I am using one of the 7i52 encoder inputs for the feedback
[19:06:13] <pcw_home> In any case the PID setup is not working for some reason
[19:06:15] <pcw_home> If it was, either there would be no creep (correct feedback) or it would runway (reversed feedback)
[19:08:21] -!- patrickarlt has quit [Remote host closed the connection]
[19:08:27] -!- kb8wmc has quit [Quit: ChatZilla 0.9.92 [Firefox 20.0/20130329043827]]
[19:09:11] -!- lair82_ [lair82_!616b5c34@gateway/web/freenode/ip.97.107.92.52] has joined #linuxcnc
[19:09:56] <pcw_home> I would check
[19:09:58] <pcw_home> input scaling (does the DRO read correctly)
[19:09:59] <pcw_home> PID HAL wiring
[19:10:01] <pcw_home> does the PID output connect to the right place (a pwmgen)
[19:10:02] <pcw_home> and does the output make sense (With P=1 the static ouput will equal the error)
[19:10:04] <pcw_home> is the PWMGen enabled?
[19:12:55] -!- erictheise has quit [Quit: erictheise]
[19:13:11] <lair82_> At the machine now, here is my hal or the a axis
http://pastebin.com/ytTKB2ec, the pwmgen is enabled
[19:13:23] <lair82_> hal for the a axis
[19:19:11] <lair82_> pcw_home that is another question, the scaling right now the servo motor is clamped to the table, not mounted in the rotary table, but regardless the drive is sending the 7i52 a 1:1 encoder signal 2500 ppr quad, so 10,000 pulses
[19:20:58] <lair82_> When I put the servo in the rotary, I need to adjust the ENCODER_SCALE in my INI so a command of 360 degrees of the table actually equals one full revolution correct?
[19:24:06] <pcw_home> AFAIK rotaries are scaled in degrees so the input scale would be encoder counts per degree
[19:25:52] <lair82> So 27.777 repeating, should be my scale
[19:26:10] <lair82> So I am way off, I have it at 1000
[19:28:22] <pcw_home> that seems pretty low, what is your rotary table gear ratio?
[19:31:38] <pcw_home> 27.777 would be the scale for motor shaft (10000/360)
[19:31:39] <pcw_home> but the 27.777 needs to be multiplied by the rotary tables gear ratio
[19:32:36] -!- patrickarlt has quit [Remote host closed the connection]
[19:34:11] -!- naja452 [naja452!~androirc@97.41.178.164] has joined #linuxcnc
[19:34:14] -!- ohbboh [ohbboh!d8b26d55@gateway/web/freenode/ip.216.178.109.85] has joined #linuxcnc
[19:34:21] -!- ohbboh [ohbboh!d8b26d55@gateway/web/freenode/ip.216.178.109.85] has parted #linuxcnc
[19:34:24] -!- ohbboh [ohbboh!d8b26d55@gateway/web/freenode/ip.216.178.109.85] has joined #linuxcnc
[19:34:51] <lair82> I'm not sure what the reduction is, it is either 1/360 or 1/180, apparently they put multiple servos in this unit, with either 2000rpm or 1500rpm ratings
[19:35:18] <lair82> And there was no data on the servo I took out of this thing when we bought it
[19:36:13] -!- ve7it [ve7it!~LawrenceG@S01060014d19d0b68.pk.shawcable.net] has joined #linuxcnc
[19:36:16] <pcw_home> OK so thats either 5000 or 10000 for scale
[19:36:27] <lair82> Was just typing that
[19:36:27] -!- Audioburn has quit [Ping timeout: 272 seconds]
[19:36:38] <lair82> Ok, so that clears that up,
[19:37:14] <lair82> And sure enough, I gotta roll, have to go to another shop and look at a machine.
[19:38:04] <lair82> I will hit this again in the morning, I'm sure it is something simple, just working on a rotary axis vs a linear is new to me
[19:39:48] -!- naja452 has quit [Ping timeout: 272 seconds]
[19:45:20] -!- RoyBellingan has quit [Quit: Konversation terminated!]
[19:51:15] -!- Tom_L has quit [Quit: Leaving]
[19:54:51] Audioburn is now known as Audio
[19:57:33] -!- tinkerer has quit [Read error: Connection reset by peer]
[20:06:39] -!- PetefromTn_ [PetefromTn_!~IceChat9@75-136-59-160.dhcp.jcsn.tn.charter.com] has joined #linuxcnc
[20:09:38] -!- SEL [SEL!~SEL@net77-43-27-64.mclink.it] has joined #linuxcnc
[20:09:46] -!- JesusAlos has quit [Quit: JesusAlos]
[20:14:46] -!- automata_ has quit [Ping timeout: 265 seconds]
[20:19:36] -!- skunkworks has quit [Ping timeout: 265 seconds]
[20:20:38] -!- SEL has quit [Quit: Leaving]
[20:23:55] -!- micges has quit [Quit: Leaving]
[20:25:25] -!- patrickarlt has quit [Remote host closed the connection]
[20:28:50] <Sync> zeeshan: who in the fuck thought it was a good idea to change the brake calipers between the hatchback and the wagon versions?!
[20:28:59] <Sync> just ragequit changing the handbrake cables
[20:36:16] -!- exitcode1 has quit [Quit: quit]
[20:36:20] -!- PCW has quit [Read error: Connection reset by peer]
[20:46:11] -!- PetefromTn_ has quit [Quit: I'm Outta here!!]
[20:48:09] <CaptHindsight> Tom_itx: load up the toolbar with your most used features
[20:48:41] -!- johtso has quit [Quit: Connection closed for inactivity]
[20:54:33] -!- skunkworks [skunkworks!~chatzilla@str-broadband-ccmts-ws-26.dsl.airstreamcomm.net] has joined #linuxcnc
[20:55:30] -!- skunkworks has quit [Client Quit]
[20:55:51] -!- skunkworks [skunkworks!~chatzilla@str-broadband-ccmts-ws-26.dsl.airstreamcomm.net] has joined #linuxcnc
[20:56:26] -!- chillly has quit [Quit: Ex-Chat]
[20:56:42] <XXCoder> heys
[21:06:18] -!- SpeedEvil has quit [Quit: No Ping reply in 180 seconds.]
[21:06:54] -!- SpeedEvil [SpeedEvil!~quassel@tor/regular/SpeedEvil] has joined #linuxcnc
[21:08:45] -!- b_b has quit [Remote host closed the connection]
[21:09:23] -!- radish has quit [Ping timeout: 276 seconds]
[21:12:39] -!- SpeedEvil has quit [Quit: No Ping reply in 180 seconds.]
[21:13:22] -!- SpeedEvil [SpeedEvil!~quassel@tor/regular/SpeedEvil] has joined #linuxcnc
[21:22:24] -!- md-2 has quit [Quit: Leaving...]
[21:29:48] -!- Tecan has quit [Ping timeout: 255 seconds]
[21:31:20] -!- Tecan [Tecan!~fasdf@unaffiliated/unit41] has joined #linuxcnc
[21:31:42] -!- jerryitt has quit [Quit: Connection closed for inactivity]
[21:39:47] -!- tobias47n9e_ has quit [Quit: Leaving]
[21:43:50] -!- jepler has quit [Read error: Connection reset by peer]
[21:49:17] -!- eFuchs_mobil has quit [Remote host closed the connection]
[21:50:16] -!- uwe_ has quit [Ping timeout: 272 seconds]
[21:53:15] -!- Komzpa has quit [Ping timeout: 240 seconds]
[21:56:32] -!- uwe_ [uwe_!~uwe_@dslb-084-056-052-123.084.056.pools.vodafone-ip.de] has joined #linuxcnc
[21:59:03] -!- Tecan has quit [Ping timeout: 255 seconds]
[22:04:01] <Deejay> gn8
[22:04:41] -!- Deejay has quit [Quit: bye]
[22:12:20] -!- FinboySlick has quit [Quit: Leaving.]
[22:17:06] <SpeedEvil> http://imgur.com/gallery/BfLdbMC on the topic of polymer-composite lathes
[22:19:48] * JT-shop takes five with Dave Brubeck
[22:21:56] <skunkworks> that gets stuck in my head
[22:22:20] -!- Greg___ [Greg___!4b1b664f@gateway/web/freenode/ip.75.27.102.79] has joined #linuxcnc
[22:22:29] <JT-shop> lol
[22:23:11] <skunkworks> I am in a cake mood atm
[22:24:07] <skunkworks> sheeps go to heaven goats go to hell
[22:30:41] -!- AndChat|407721 [AndChat|407721!~AndChat40@2600:1005:b166:841c:0:4b:7b1f:f901] has joined #linuxcnc
[22:33:44] -!- duc has quit [Ping timeout: 246 seconds]
[22:38:55] -!- gonzo_nb [gonzo_nb!~gonzo@host-92-6-244-28.as43234.net] has joined #linuxcnc
[22:40:23] -!- justanotheruser has quit [Ping timeout: 276 seconds]
[22:56:28] -!- justanotheruser [justanotheruser!~Justan@unaffiliated/justanotheruser] has joined #linuxcnc
[23:01:51] -!- Nick001-shop has quit [Quit: ChatZilla 0.9.92 [Firefox 39.0.3/20150806001005]]
[23:07:48] -!- ohbboh has quit [Ping timeout: 246 seconds]
[23:08:28] -!- jduhls has quit [Remote host closed the connection]
[23:27:17] -!- malcom2073 [malcom2073!~quassel@mikesshop.net] has joined #linuxcnc
[23:32:31] -!- tannewt has quit [Quit: My Mac has gone to sleep. ZZZzzz…]
[23:40:14] * JT-shop tosses in the towel for the day
[23:46:33] -!- Valen [Valen!~Valen@c211-30-128-202.blktn6.nsw.optusnet.com.au] has joined #linuxcnc
[23:46:37] -!- Camaban has quit [Quit: Leaving]
[23:48:17] -!- gonzo_nb has quit [Remote host closed the connection]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}