Back
[00:00:00] <andypugh> 3" through the spindle and 1600 rpm. Those are not going to be cheap bearings.
[00:01:30] -!- Nick001-shop has quit [Quit: ChatZilla 0.9.90.1 [Firefox 24.0/20130910160258]]
[00:05:24] -!- kwallace3 [kwallace3!~kwallace@smb-136.sonnet.com] has joined #linuxcnc
[00:05:36] -!- kwallace has quit [Ping timeout: 245 seconds]
[00:05:42] -!- Nick001 has quit [Ping timeout: 265 seconds]
[00:10:46] -!- Nick001 [Nick001!~Nick001@plns-199-224-122-127-pppoe.dsl.plns.epix.net] has joined #linuxcnc
[00:22:42] <andypugh> Night chaps
[00:22:48] -!- andypugh has quit [Quit: andypugh]
[00:25:56] -!- joe9 [joe9!~user@ip70-179-153-227.fv.ks.cox.net] has joined #linuxcnc
[00:26:15] -!- Laremere has quit [Ping timeout: 252 seconds]
[00:31:48] Laremere_AFK is now known as Laremere
[00:40:01] -!- sumpfralle has quit [Quit: Leaving.]
[01:02:12] -!- sumpfralle [sumpfralle!~lars@c.mail.systemausfall.org] has joined #linuxcnc
[01:11:01] -!- rob_h has quit [Ping timeout: 245 seconds]
[01:22:50] -!- c-bob [c-bob!~c@unaffiliated/c-bob] has joined #linuxcnc
[01:23:02] -!- c-bob|| has quit [Ping timeout: 264 seconds]
[01:24:02] -!- gimps [gimps!~noone@64-121-232-59.c3-0.eas-ubr3.atw-eas.pa.cable.rcn.com] has joined #linuxcnc
[01:24:03] -!- gimps has quit [Changing host]
[01:24:03] -!- gimps [gimps!~noone@unaffiliated/gimps] has joined #linuxcnc
[01:35:51] -!- thomaslindstr_m has quit [Remote host closed the connection]
[01:54:24] -!- PetefromTn [PetefromTn!~PetefromT@172.56.20.72] has joined #linuxcnc
[01:56:37] -!- PetefromTn has quit [Client Quit]
[01:57:41] -!- PetefromTn [PetefromTn!~PetefromT@66-168-88-82.dhcp.kgpt.tn.charter.com] has joined #linuxcnc
[02:04:47] -!- PetefromTn has quit [Ping timeout: 272 seconds]
[02:05:26] -!- paideia has quit [Ping timeout: 240 seconds]
[02:05:41] -!- PetefromTn [PetefromTn!~PetefromT@66-168-88-82.dhcp.kgpt.tn.charter.com] has joined #linuxcnc
[02:08:15] -!- PetefromTn has quit [Client Quit]
[02:12:33] -!- micges has quit [Quit: Leaving]
[02:16:42] -!- voxadam [voxadam!voxadam@unaffiliated/voxadam] has joined #linuxcnc
[02:22:04] -!- NickParker|2 [NickParker|2!~kvirc@c-24-6-124-113.hsd1.ca.comcast.net] has joined #linuxcnc
[02:25:48] -!- NickParker has quit [Ping timeout: 240 seconds]
[02:32:15] -!- joe9 has quit [Remote host closed the connection]
[02:42:39] -!- archivist_herron has quit [Ping timeout: 252 seconds]
[02:55:22] -!- archivist_herron [archivist_herron!~herron@80.175.14.110] has joined #linuxcnc
[03:04:03] -!- gabewillen has quit [Client Quit]
[03:11:42] -!- terabyte- [terabyte-!~terabyte@c-76-108-132-114.hsd1.fl.comcast.net] has joined #linuxcnc
[03:30:42] -!- sumpfralle has quit [Quit: Leaving.]
[04:02:08] -!- pcw_home has quit [Ping timeout: 240 seconds]
[04:09:12] -!- jp_mill has quit [Read error: Operation timed out]
[04:10:07] -!- pcw_home [pcw_home!~chatzilla@c-50-174-121-10.hsd1.ca.comcast.net] has joined #linuxcnc
[04:13:05] -!- gambakufu has quit [Ping timeout: 272 seconds]
[04:14:02] -!- gambakufu [gambakufu!~ah@bzq-84-110-35-236.red.bezeqint.net] has joined #linuxcnc
[04:23:59] -!- jp_mill [jp_mill!~jp@CPEf07bcb8dc98f-CM001bd71cb794.cpe.net.cable.rogers.com] has joined #linuxcnc
[04:31:25] -!- jp_mill has quit [Read error: Operation timed out]
[04:32:07] -!- jp_mill [jp_mill!~jp@CPEf07bcb8dc98f-CM001bd71cb794.cpe.net.cable.rogers.com] has joined #linuxcnc
[04:35:43] -!- Laremere has quit [Remote host closed the connection]
[04:59:08] -!- AR__ has quit [Ping timeout: 240 seconds]
[05:02:08] -!- Fox_Muldr has quit [Ping timeout: 240 seconds]
[05:04:26] -!- Fox_Muldr [Fox_Muldr!quakeman@frnk-4d01eb56.pool.mediaWays.net] has joined #linuxcnc
[05:35:57] -!- kwallace3 [kwallace3!~kwallace@smb-136.sonnet.com] has parted #linuxcnc
[05:45:32] -!- FinboySlick has quit [Quit: Leaving.]
[05:46:57] -!- terabyte- has quit [Quit: terabyte-]
[06:03:57] -!- DaOne has quit [Ping timeout: 250 seconds]
[06:06:46] -!- ChristianS has quit [Excess Flood]
[06:07:07] -!- ChristianS [ChristianS!~Christian@h1774509.stratoserver.net] has joined #linuxcnc
[06:11:12] -!- Valen has quit [Read error: Connection timed out]
[06:11:53] -!- Valen [Valen!~Valen@c211-28-237-68.blktn6.nsw.optusnet.com.au] has joined #linuxcnc
[06:27:44] -!- terabyte- [terabyte-!~terabyte@c-76-108-132-114.hsd1.fl.comcast.net] has joined #linuxcnc
[06:32:14] -!- JesusAlos [JesusAlos!~chatzilla@200.19.19.95.dynamic.jazztel.es] has joined #linuxcnc
[06:35:00] <JesusAlos> hi
[06:44:20] -!- _DJ_ [_DJ_!~Deejay@unaffiliated/dj9dj] has joined #linuxcnc
[06:45:00] <_DJ_> moin
[06:47:57] <t12> heya
[06:48:09] <t12> finally probed the comms from the mitsubishi encoder
[06:48:11] <t12> its somewhat confusing
[06:52:03] -!- terabyte- has quit [Quit: terabyte-]
[06:53:21] <t12> https://www.dropbox.com/sc/5skqj6nm3oc7c3m/vyunJ2h_oD#/
[06:53:40] <t12> + and - for MR, MRR, MD, MDR, and the subtracted trace
[06:53:48] <t12> One of those is MR, MRR the other MD, MDR
[06:54:07] <t12> both lines seem to have encoder position data on them
[06:54:24] <t12> one set of pulses seems to have a preamble
[06:54:47] <t12> data always seems to be fixed data, lsb -> msb position data, fixed data, checksum (assumed)
[07:07:23] -!- ChristianS has quit [Excess Flood]
[07:07:44] -!- ChristianS [ChristianS!~Christian@h1774509.stratoserver.net] has joined #linuxcnc
[07:12:01] -!- vladimirek has quit [Remote host closed the connection]
[07:50:42] -!- pascal [pascal!~chatzilla@162-54.61-188.cust.bluewin.ch] has joined #linuxcnc
[07:57:56] <pascal> Guten Morgen zusammen, bin einsteiger und möchte eine Fräse mit zwei x-achsen, einer y und einer z achse konfigurieren. Die Motoren konnte ich bereits einstellen mit stepconf wizard, aber wie geht es nun weiter?
[08:02:31] -!- pascal has quit [Quit: ChatZilla 0.9.90.1 [Firefox 11.0/20120310193829]]
[08:03:50] -!- toner has quit [Ping timeout: 240 seconds]
[08:17:33] -!- toner [toner!~ink@c-50-150-125-200.hsd1.ca.comcast.net] has joined #linuxcnc
[08:22:11] -!- ler_hydra [ler_hydra!~ler_hydra@sailor-link.olf.sgsnet.se] has joined #linuxcnc
[08:28:52] -!- toner has quit [Ping timeout: 265 seconds]
[08:33:47] _DJ_ is now known as DJ
[08:33:59] DJ is now known as _DJ_
[08:41:07] -!- toner [toner!~ink@c-50-150-125-200.hsd1.ca.comcast.net] has joined #linuxcnc
[08:51:24] -!- stsydow has quit [Remote host closed the connection]
[09:14:44] -!- rob_h [rob_h!~rob_h@2.219.33.79] has joined #linuxcnc
[09:15:16] -!- mhaberler [mhaberler!~mhaberler@macbook.stiwoll.mah.priv.at] has joined #linuxcnc
[09:21:28] -!- JesusAlos has quit [Ping timeout: 240 seconds]
[09:21:54] -!- JesusAlos [JesusAlos!~chatzilla@200.19.19.95.dynamic.jazztel.es] has joined #linuxcnc
[09:27:11] -!- asdfasd [asdfasd!123456@149.241.143.189] has joined #linuxcnc
[09:31:08] -!- JesusAlos has quit [Ping timeout: 240 seconds]
[09:31:40] -!- JesusAlos [JesusAlos!~chatzilla@200.19.19.95.dynamic.jazztel.es] has joined #linuxcnc
[09:58:31] -!- stsydow has quit [Remote host closed the connection]
[10:26:40] jthornton_ is now known as jthornton
[10:31:38] -!- _DJ_ has quit [Ping timeout: 265 seconds]
[10:31:55] -!- _DJ_ [_DJ_!~Deejay@unaffiliated/dj9dj] has joined #linuxcnc
[11:10:30] -!- stsydow has quit [Remote host closed the connection]
[11:11:05] <jthornton> .quantize
[11:12:38] <archivist> quantisation error
[11:13:25] <archivist> the posh word for my periodic error
[11:14:02] <jthornton> I'm learning about python decimal, which does not have the rounding errors of float
[11:15:05] <archivist> I updated
http://www.archivist.info/cnc/screw_error/ this morning with some more numbers "proving" where the error is from
[11:17:11] <archivist> we recommend decimal in #mysql because you get back what you put in
[11:18:04] <jthornton> yes, decimal is much more friendly and predicable
[11:18:29] -!- Valen has quit [Quit: Leaving.]
[11:19:37] <archivist> and the good old resolution v accuracy...which noobs get wrong
[11:19:48] <jthornton> aye
[11:22:28] -!- thomaslindstr_m has quit [Remote host closed the connection]
[11:26:01] -!- JesusAlos has quit [Read error: Connection reset by peer]
[11:26:38] -!- JesusAlos_ [JesusAlos_!~chatzilla@200.19.19.95.dynamic.jazztel.es] has joined #linuxcnc
[11:26:56] JesusAlos_ is now known as JesusAlos
[11:32:07] -!- JesusAlos has quit [Read error: Connection reset by peer]
[11:36:46] -!- JesusAlos [JesusAlos!~chatzilla@200.19.19.95.dynamic.jazztel.es] has joined #linuxcnc
[11:40:30] -!- sumpfralle [sumpfralle!~lars@c.mail.systemausfall.org] has joined #linuxcnc
[11:54:54] -!- JesusAlos has quit [Quit: ChatZilla 0.9.90.1 [Firefox 20.0/20130329043827]]
[12:00:14] -!- jp_mill has quit [Ping timeout: 240 seconds]
[12:01:47] -!- jp_mill [jp_mill!~jp@CPEf07bcb8dc98f-CM001bd71cb794.cpe.net.cable.rogers.com] has joined #linuxcnc
[12:03:55] -!- sumpfralle has quit [Quit: Leaving.]
[12:04:30] -!- sumpfralle [sumpfralle!~lars@87.234.216.224] has joined #linuxcnc
[12:08:08] -!- sumpfralle1 [sumpfralle1!~lars@c.mail.systemausfall.org] has joined #linuxcnc
[12:10:52] -!- sumpfralle has quit [Ping timeout: 246 seconds]
[12:12:55] -!- LeelooMinai_ [LeelooMinai_!~quassel@24-212-142-144.cable.teksavvy.com] has joined #linuxcnc
[12:13:58] -!- LeelooMinai has quit [Read error: Connection reset by peer]
[12:14:06] -!- Thetawaves has quit [Ping timeout: 265 seconds]
[12:14:25] -!- Thetawaves [Thetawaves!~theta@114-68-237-24.gci.net] has joined #linuxcnc
[12:19:14] -!- stsydow has quit [Remote host closed the connection]
[12:21:17] -!- afiber__ [afiber__!~sabayonus@p2003005BE9809E01BE5FF4FFFE4A972D.dip0.t-ipconnect.de] has joined #linuxcnc
[12:23:21] -!- afiber__ has quit [Client Quit]
[12:27:32] -!- ler_hydra has quit [Remote host closed the connection]
[12:42:00] <archivist> what kind of "glass" is used for distance standards like 1"
[12:43:56] -!- berny83 [berny83!~berny83@93.188.115.2] has joined #linuxcnc
[12:46:32] <berny83> hi guys, i'm trying to run linuxcnc but I've two main issue that have stop my work, are you so kindly to help me in solving the two issues?
[12:49:17] <archivist> just ask the real questions
[12:49:54] <berny83> first of all i'm trying to set up homing with home_use_index (indexpulse + mechanical switch), I have a problem while performing homing: the home procedure works fine but when the index pulse has been detected, the axis does not stop but it travel for about 25/30 mm towards positive coordinates (i have set home_offset = 0 and home = 0)
[12:50:42] <berny83> it seems that the overshoot travel depens on the home_final_vel value
[12:51:14] <berny83> the greater is home_final_vel, the greater is the overshoot
[12:52:16] <archivist> have you set your acceleration/deceleration very slow
[12:52:19] <berny83> Practically i would the axis to stop on the index pulse (home = 0 and home_offset = 0)
[12:52:50] <berny83> acceleration is about 3000
[12:53:14] <berny83> that seems to be enough while jogging
[12:56:53] <berny83> the other problem i've is about stability of the system, often, while drivers are enabled, I get "contact on limit 0" without a real contact... monitoring the signal with halscope I discovered that a random true state occur (length about 0.5 ms) and cause the machine to toggle drivers enable status
[12:57:23] <berny83> I use mesa 5i23 with hostmot2 fpga
[12:58:02] <archivist> you need to fix random signals, make sure pulled up/down properly and no ground loops etc
[12:58:03] <berny83> so PCI board with PCI power
[12:59:52] <berny83> previous installation gives me this problem randomly (1 or 2 times/day); yesterday, a new installation gives me the contact on limit 0 continuosly (20/30 times on a single morning)
[13:00:24] <berny83> sometimes also contact on limit 1 has occurred
[13:01:15] <berny83> do you think it's due to electromagnetic noise?
[13:04:10] -!- breast [breast!5dbc7302@gateway/web/freenode/ip.93.188.115.2] has joined #linuxcnc
[13:06:14] <archivist> bad contact,noise,ground loop, bad/wrong pull up/down, you have to diagnose
[13:06:45] <archivist> I would be using a real scope to do that
[13:06:51] <berny83> you have said "make sure pulled up/down properly and no ground loops etc", jave you any link where I can read something about it? I've no feeling with electical components
[13:07:58] <archivist> also did you follow the guide/best practices in the mesa manual for pull ups
[13:07:59] <berny83> I simply connect mechanical switch to 5i23 GPIO (with jumpers on 3.3V)
[13:08:24] <archivist> how good is the switch too
[13:08:38] <berny83> OMRON microswitch
[13:09:16] <archivist> while a reasonable maker, I would want to test/measure the contact
[13:09:48] <berny83> but i get that problem also soldering the cable (so I think is not due to bad switch)
[13:10:07] <archivist> never assume
[13:10:21] <berny83> :)
[13:10:46] <archivist> I was testing a contact a week ago and it needed some current to wet the contacts
[13:11:45] <archivist> 3k ohms on a meter, but 6volts and some current one could light some LEDs through it
[13:11:48] <berny83> you are right but if I take off the switch and join the two wires..
[13:12:56] <berny83> have you any experience with pci power supply?
[13:14:27] <berny83> CIT from MESA manual : Pullup resistors are provided for all I/O pins, These pullups can simplify interfacing
[13:14:27] <berny83> to open collector devices such as mechanical switches, OPTO isolators and OPTO
[13:14:27] <berny83> interrupters. Pullup voltage can be selected to be 5V or 3.3V on a per connector basis.
[13:14:27] <berny83> When the pullup voltage jumper is in the ‘up’ position, 5V pullup voltage is selected, when
[13:14:27] <berny83> the jumper is in the ‘down’ position, 3.3V pullup voltage is selected.
[13:16:09] <archivist> get your meter on the volts range across the switch, measure when open and closed
[13:16:54] <berny83> ok
[13:17:09] <berny83> i'll try it
[13:19:01] <berny83> i'm very sad because these problems, they are too important...
[13:19:17] -!- hashfail has quit [Ping timeout: 272 seconds]
[13:22:17] -!- Cylly [Cylly!cylly@p54B11220.dip0.t-ipconnect.de] has joined #linuxcnc
[13:23:38] -!- Loetmichel has quit [Ping timeout: 264 seconds]
[13:30:10] -!- jepler has quit [Quit: Reconnecting]
[13:30:22] -!- jepler [jepler!~jepler@emc/developer/pdpc.professional.jepler] has joined #linuxcnc
[13:32:53] -!- AR__ [AR__!~AR@24.238.71.107] has joined #linuxcnc
[13:33:31] -!- kwallace [kwallace!~kwallace@tmb-246.sonnet.com] has joined #linuxcnc
[13:36:07] <berny83> are anyone here using 5i23?
[13:37:07] <berny83> I'm searching for extra-info (manual and integrator manual are not exaustive for me)
[13:41:02] <archivist> there are plenty using mesa cards, just ask the real questions in IRC then anyone can answer
[13:44:25] <pcw_home> If you connect field wiring (switches etc) directly to 5I23 inputs, expect to see noise (inputs work to 100MHz or so)
[13:48:35] -!- breast has quit [Quit: Page closed]
[13:49:29] <berny83> ok, and what would be the best practice in order to avoid noises?
[13:50:36] <pcw_home> Thinks you can do:
[13:50:38] <pcw_home> 1. Use a daughter card thats intended for this purpose (7I37TA, 7I42TA, 7I70 etc)
[13:50:39] <pcw_home> 2. Put a small capacitor across the 5I23 input and ground
[13:50:41] <pcw_home> 3. Use the HAL debounce component
[13:50:42] <pcw_home> 4. Shield switch wiring
[13:51:40] <berny83> ok :) now I have some ways to investigate!!
[13:52:42] <berny83> thanks, I am a newbie in electronics!!
[13:53:17] <berny83> and I've never had to do with electric noises
[13:53:41] <pcw_home> Well method 3 is software only :-)
[13:59:33] <berny83> I think I'll try it first of all!!
[13:59:38] <berny83> thanks again!!!!
[14:00:46] <berny83> I'm going to try it now!! Bye bye all!
[14:01:01] -!- berny83 [berny83!~berny83@93.188.115.2] has parted #linuxcnc
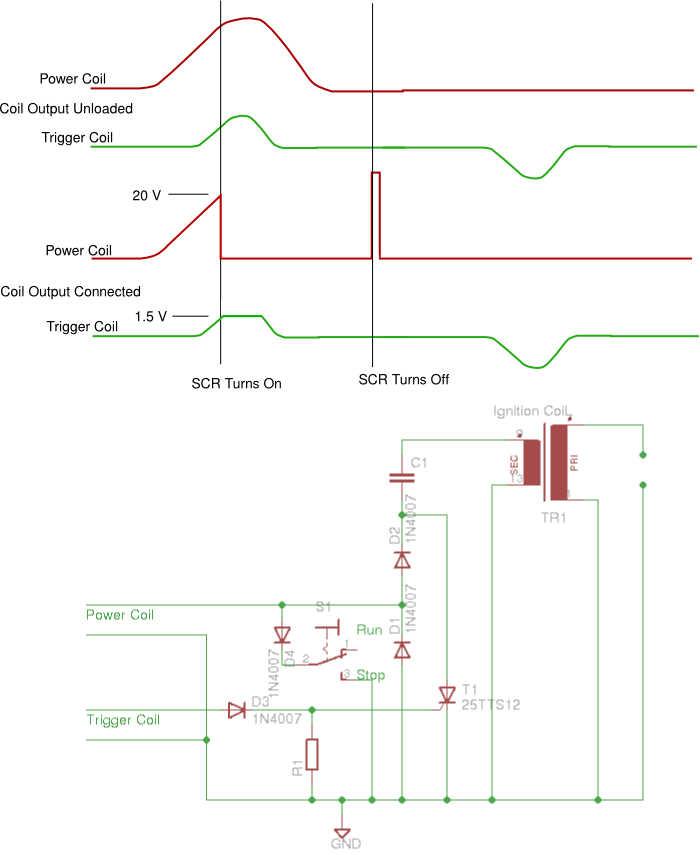
[14:10:03] <kwallace> Since there is no traffic. This looks like it should work but I get no spark:
http://www.wallacecompany.com/KDX250/cdi_signals-1a.png I'm wondering if the voltages are too low, weak magnets?
[14:10:35] -!- NickParker|2 has quit [Ping timeout: 272 seconds]
[14:17:56] -!- stsydow has quit [Remote host closed the connection]
[14:19:18] <pcw_home> How is it intended to work? looks like you would only get 20V
[14:19:20] <pcw_home> on the spark coil primary, about 10x too low for normal coils
[14:22:32] <pcw_home> Normal magnetos store inductive energy in the spark coil and interrupt the current
[14:22:33] <pcw_home> to generate the spark. Capacitive discharge types need a couple hundred volts normally
[14:26:01] <kwallace> That's why I'm wondering if the magnets are weak, but I'm not sure since I didn't record the voltages when the bike was running.
[14:26:50] <pcw_home> 20V seems really low
[14:27:06] <kwallace> I put in new stator coils a few years back and they have reasonable resistance.
[14:27:12] -!- berny83 [berny83!5ea5c0db@gateway/web/freenode/ip.94.165.192.219] has joined #linuxcnc
[14:30:13] <archivist> I am a bit surprised at 1n4007 in that circuit, not the fastest devices
[14:30:36] <kwallace> Around 170 ohms power coil and 70 trigger. Even the trigger voltage seems low, since the schematics I have seen usually have current limit resistors.
[14:31:07] <pcw_home> might measure the open circuit power coil output to see if theres a load problem
[14:31:47] <kwallace> The upper two traces are open circuit.
[14:32:16] <archivist> some ignition coils could be damaged if run without the spark gap in place
[14:33:04] <pcw_home> 170 ohms sounds pretty high, like its intended to genarat a high voltage (as you would expect)
[14:33:34] <pcw_home> generate
[14:34:14] <kwallace> The upper power trace peaks at about 25 Volts and is measured with the coil wires connected only to the scope.
[14:34:48] <pcw_home> kick starter? maybe you are getting old and slow :-)
[14:35:30] <archivist> close the plug up a bit
[14:36:49] <kwallace> I turned the rotor with a socket and a bit brace as fast as I could turn it.
[14:38:16] <archivist> battery drill
[14:38:19] <pcw_home> whats the voltage rating on the capacitor
[14:38:48] <pcw_home> or is this a potted module :-(
[14:39:44] <kwallace> The circuit is homemade based on what I found on the Internet. The cap is rated for 600V.
[14:40:12] <kwallace> http://users.rcn.com/cfharris/minibikeignition.html
[14:41:29] <kwallace> http://homemadecircuitsandschematics.blogspot.com/2011/12/how-to-make-capacitive-discharge.html
[14:43:50] <archivist> I have a bunch of early Lucas circuits here but were for car ignition
http://www.collection.archivist.info/searchv13.php?searchstr=lucas+opus
[14:46:23] <kwallace> I'll need to bookmark that link, thank you.
[14:48:46] <CaptHindsight> the PIC should be fast enough to make an MSD (multiple spark discharge) so you can squeeze a bit more more out of that engine
[14:49:18] <kwallace> I think I'll remove the rotor and try to excite the power coil with another magnet or coil to see if I can get the voltage up. If that works, I'll need to figure out how to repair or replace the rotor.
[14:50:53] <kwallace> CaptHindsight: I was hoping to restore what I had to prevent another long project which doesn't seem to be happening.
[14:52:28] <kwallace> Another issue, I nearly killed myself the last time I rode the bike.
[14:52:44] -!- false_ [false_!~chatzilla@2001:981:b4cd:1:ac9b:17c5:6d6e:249] has joined #linuxcnc
[14:53:15] <pcw_home> A rare earth magnet ought to liven it up a bit
[14:54:46] <pcw_home> dont end up in the Honda ward...
[14:55:34] <archivist> I am reminded of the knight in moty python saying its just a flesh wound
[14:56:02] -!- false has quit [Ping timeout: 264 seconds]
[14:56:08] false_ is now known as false
[14:57:43] <pcw_home> i gave up riding about 15 years ago
[14:58:00] <CaptHindsight> kwallace: just be really careful around the high voltage end of the coil, I've had arcs go through my hands leaving burns on opposite sides
[14:59:03] -!- kwallace3 [kwallace3!~kwallace@tmb-225.sonnet.com] has joined #linuxcnc
[14:59:06] -!- kwallace has quit [Ping timeout: 252 seconds]
[15:01:06] <berny83> pcw_home, debounce component seems to be what I was searching for. No more "crazy" contacts up to now!
[15:01:47] <berny83> My 50% of the problem seems to be solved!
[15:02:46] <pcw_home> Yeah the raw FPGA inputs are a bit too fast unless you have some filtering
[15:04:54] <berny83> Now I have only the homing issue... i.e. when i perform homing procedure (mechanical switch + servo index pulse) the axis does not stop on the index pulse (I've set HOME = 0 and HOME_OFFSET = 0) but it goes forward (it seems to go forward until the original position has been reached..)
[15:05:23] -!- chillly has quit [Quit: Leaving]
[15:05:51] <berny83> Sure, I note it, and I have payed it with some nights at work!!! :D
[15:09:14] <pcw_home> have you looked at this:
[15:09:16] <pcw_home> http://www.linuxcnc.org/docs/2.4/html/config_ini_homing.html
[15:09:41] <kwallace3> Don't ignore proper cable terminating and filtering. Most input impedances are high and very easy to induce a noise onto.
[15:10:31] <berny83> ok, i know that link
[15:10:53] <berny83> and i read it more than one times
[15:11:16] <pcw_home> also you should verify tha the index inputs work properly
[15:11:22] <pcw_home> that
[15:11:23] <berny83> I try to better explain my honming issue... :) suppose I switch on the machine and the X axis is positioned at half stroke, I perform the homing and the axis come back exactly to half stroke
[15:13:04] <berny83> the only thinghs I've not understand are velocities sign, if i put serachvel positive, cnc drive the axis toward the + limit, opposite to the home position
[15:13:47] <berny83> i'm trying to configure cnc in order to home with the 3th scheme
[15:14:31] -!- joe9 [joe9!~user@ip70-179-153-227.fv.ks.cox.net] has joined #linuxcnc
[15:14:36] <berny83> coming back to touch the mechanical home, then invert direction and stop on the first index pulse
[15:15:03] <berny83> what is wrong in my homing procedure?
[15:16:05] <pcw_home> I would get homing to limit swiches only working first
[15:16:06] <berny83> if I would verify index pulse to work properly, what kind of test could i perform?
[15:16:22] <kwallace3> What do you use for the index sensor? Is there a sensor on the slide and the screw?
[15:17:10] <berny83> no, i use the pulse of the encoder on the back side of the motor
[15:17:12] <pcw_home> unlink index enable from motion, manually setp index enable and rotate shaft
[15:17:26] <berny83> i can get that signal by the drive
[15:17:51] <pcw_home> and verify that index enable is always cleared at the index position
[15:17:56] <pcw_home> bbl
[15:18:36] <berny83> i use delta servo
[15:20:06] <berny83> i've not fully understand your suggested test
[15:20:19] <berny83> i've to unlink index pulse wire??
[15:20:26] <kwallace3> Typically the slide has a rough index which can only produce one index pulse for the entire travel. This is coupled with the screw or motor index, which will produce an index every revolution.
[15:21:14] <berny83> yes, i think i'm homing following this concept
[15:22:06] <berny83> the index on the slide is a mechanical switch connected to home-x hal signal
[15:22:21] <kwallace3> In HAL there is a link between the motion module's index enable and your index sensor signal.
[15:22:52] <berny83> while the other is the axis.0.index-enable
[15:23:06] <berny83> yes sure
[15:23:08] <kwallace3> I think PCW wants you to remove that link and set the enable by hand with setp.
[15:23:59] <kwallace3> I think this will force motion to look for your index.
[15:24:05] <berny83> net x-index-enable axis.0.index-enable hm2_5i23.0.encoder.01.index-enable
[15:24:36] <berny83> 01 is beacuse I have inverted the two encoder wires (x with y)
[15:25:43] <berny83> what kind of command i have to write for example?
[15:25:45] <kwallace3> I'm not too familiar with the mesa setup and homing so I'm not much help without taking time out to study it.
[15:26:14] <berny83> ok, thanks anyway!
[15:26:27] <kwallace3> You can use setp with halcmd in a terminal.
[15:26:28] Cylly is now known as Loetmichel
[15:26:31] <berny83> you all are more and more experts than me
[15:27:20] -!- Nick001 has quit []
[15:27:34] <kwallace3> You can start LInuxCNC then open a terminal and start halcmd.
[15:28:27] <berny83> yes yes i kown it a bit
[15:30:40] <berny83> anyway the cnc seems to get the index because when i homing it hit the mechanical switch, then serach for index pulse (I can say it because i set latch vel very low and i see very well the difference with final vel) and take the pulse. Then instead of stop, it go away with home_final_vel
[15:32:43] <kwallace3> Have you set up HALscope to look at the axis motion to see if the axis backs off the index after finding it?
[15:33:10] -!- joe9 has quit [Remote host closed the connection]
[15:34:21] -!- terabyte- [terabyte-!~terabyte@c-76-108-132-114.hsd1.fl.comcast.net] has joined #linuxcnc
[15:34:24] -!- joe9 [joe9!~user@ip70-179-153-227.fv.ks.cox.net] has joined #linuxcnc
[15:35:15] <kwallace3> I think the the motion should search for the index at a moderate rate, hit the index, back off, then slowly find the index again. You should be able to see this on HALscope.
[15:35:20] <berny83> yes, the axis get the index
[15:36:03] <kwallace3> But do you see the proper sequence and directions?
[15:36:38] -!- afiber__ [afiber__!~sabayonus@p2003005BE9809E01BE5FF4FFFE4A972D.dip0.t-ipconnect.de] has joined #linuxcnc
[15:36:40] <berny83> yes, but you say the axis should get index twice?
[15:37:06] <berny83> from the scheme i have understand that axis get the index one time only
[15:37:24] <berny83> after hitting the mecanical switch
[15:38:42] <berny83> when i open the axis (software) x, y and z are in 0,0,0. actually the machine could be whereever in the work volume, ok?
[15:39:09] <berny83> the 0,0,0 shown by the axis is obviously wrong
[15:39:30] <kwallace3> My homing looks twice. Once to get close, then again to get to get the accurate location.
[15:40:07] <berny83> I homing the axis (now i'm trying with only the X) and it perform the rigth procedure but at the end it come back to the original 0,0,0 position
[15:41:01] <berny83> and what values have you assigned to serachvel latchvel finalvel home and homeoffset?
[15:41:30] <berny83> because the procedure depends on them values (as write in the manual)
[15:43:40] <kwallace3> The values I set came from starting slowly, then increasing them until homing failed. I then backed off the values a bit for a safety margin. My homing turned out to be pretty slow.
[15:44:40] <kwallace3> It might be helpful to post your HALscope plot.
[15:48:26] <berny83> when it starts from 0,0,0 (machine just switched on) it goes back (e.g coordinate assume negative values like -10, then -100 then -200) and stop itself on the mechanical home switch (suppose at -200mm). then it set the coordinate to 0 and start searching for pulse (tipically after 3 or 4 mm it get the pulse). then, after getting the pulse, it reset coordinate to -200mm (the same at whitch it hits the mechanical home switch) so it
[15:49:23] <berny83> in other words it comes back to the original position (when machine was off)
[15:52:20] <berny83> from halscope I see that index-pulse has been get twice
[15:52:53] <berny83> after have hit the mechanical switch
[15:53:06] <archivist> but was the first on the way to the switch
[15:54:33] <kwallace3> You should get the first index going at a direction, then back off a bit (without hitting index), then get the index again going the same direction as the first.
[15:54:46] -!- syyl-- [syyl--!~syyl@p4FD11E4A.dip0.t-ipconnect.de] has joined #linuxcnc
[15:55:07] <berny83> it seems the first occur while the mechanical switch has been relased
[15:55:45] <kwallace3> Yes, that way it knows it has backed off.
[15:56:48] <berny83> ok, but why it comes back to half stroke??
[15:57:03] <berny83> it's unbelievable!! :)
[15:57:20] <berny83> anyone tell it to com back
[15:57:37] <berny83> I would it to simply STOP
[15:57:38] <berny83> :)
[15:57:48] <berny83> there
[15:58:37] -!- syyl- has quit [Ping timeout: 272 seconds]
[15:59:38] <berny83> i've tried now to homing from a different position. It has performed the homing and then it comes back again to the original position!!!!
[16:00:32] <kwallace3> Does the homed symbol show up after the homing is done?
[16:02:01] <berny83> yes
[16:02:08] <berny83> it appear
[16:02:25] <kwallace3> In the ini file you can set up an offset home position, so after homing it will go to the index location plus the offset.
[16:03:02] <berny83> right
[16:03:15] <berny83> but offset is set to "0"
[16:03:15] <berny83> and home too
[16:03:36] <berny83> another thing is why i have to set searchvel negative and latchvel positive while all other users use opposite signs
[16:03:37] <berny83> ?
[16:04:11] -!- toastydeath has quit [Read error: Connection reset by peer]
[16:04:42] <berny83> if i set searchvel positive the machine go to positive coordinates so it will never hit the switch
[16:05:01] -!- toastydeath [toastydeath!~toast@2601:a:2e00:1e4:cd90:394e:8085:aa82] has joined #linuxcnc
[16:05:01] -!- probotix has quit [Ping timeout: 246 seconds]
[16:05:41] <kwallace3> So, it seems LinuxCNC thinks it is homing properly, but the the index signals must be wrong. I think you are getting different index locations, you should only get an index at one location.
[16:06:21] -!- toastyde1th [toastyde1th!~toast@2601:a:2e00:1e4:cd90:394e:8085:aa82] has joined #linuxcnc
[16:06:47] <kwallace3> Look at your HALscope while jogging across the axis and see if index shows up more than once.
[16:07:34] <berny83> ok
[16:08:43] <berny83> no index shown up while jogging
[16:09:20] <kwallace3> Strange.
[16:09:46] -!- toastydeath has quit [Ping timeout: 245 seconds]
[16:12:43] <kwallace3> I'm looking at my config to see where the encoder index and home sensor go.
[16:14:09] <berny83> ok, thanks a lot!!
[16:19:43] -!- kwallace3 has quit [Ping timeout: 246 seconds]
[16:19:47] -!- andypugh [andypugh!~andy2@cpc16-basl9-2-0-cust685.20-1.cable.virginmedia.com] has joined #linuxcnc
[16:24:35] -!- terabyte- has quit [Quit: terabyte-]
[16:28:56] -!- probotix [probotix!probotix@165.254.182.52] has joined #linuxcnc
[16:29:17] -!- ve7it [ve7it!~LawrenceG@S01060014d19d0b68.pk.shawcable.net] has joined #linuxcnc
[16:34:31] -!- kwallace1 [kwallace1!~kwallace@smb-235.sonnet.com] has joined #linuxcnc
[16:40:25] <kwallace1> It looks like the home sensor is linked to axis.0.home-sw-in and the encoder index to axis.0.index-enable. The link up of the two must be inside axis or motion module. I'll need to go out to the shop to see where it goes from here. BBL
[16:41:53] <berny83> thanks again
[16:42:11] <berny83> i have the same setup
[16:42:11] <berny83> .... :(
[16:42:24] <berny83> i'm beeing crazy!
[16:43:32] <berny83> no solution to the problem.. and internet does not have suggestion for me
[16:44:26] <berny83> I can perform the home but in the end it moves again on the original position where it put the "0" coordinate
[16:44:49] <berny83> it's very strange
[16:48:14] -!- psha [psha!~psha@213.208.162.67] has joined #linuxcnc
[16:48:58] -!- flippyhead has quit [Quit: flippyhead]
[17:04:02] -!- Nick001 [Nick001!~Nick001@50.32.65.58] has joined #linuxcnc
[17:11:48] -!- IchGuckLive [IchGuckLive!~chatzilla@95-89-97-51-dynip.superkabel.de] has joined #linuxcnc
[17:11:52] <IchGuckLive> hi all B)
[17:13:03] <berny83> have you ever tried to connect only the index pulse of the encoder without connecting other wire (A and B channels)?
[17:14:10] <IchGuckLive> its good at spindel only RPM
[17:14:11] <berny83> i work in a pseudo"open loop), servo drived as stepper with pulse/dir
[17:14:44] <berny83> i know but I'm trying to make this configuration on the X Y axes
[17:15:01] <IchGuckLive> berny why you can get sutch a good performance on realservo
[17:15:18] <berny83> but homing procedure became crazy and it is useless
[17:15:27] <IchGuckLive> berny where are you from USA europ asia
[17:15:38] <berny83> europe
[17:15:48] <IchGuckLive> im in kaiserslautern Germany
[17:15:56] <berny83> delta drives
[17:16:03] <berny83> nice to meet you!
[17:16:20] <berny83> do you know delta?
[17:16:45] <awallin> berny83: did you read
http://www.linuxcnc.org/docs/html/config/ini_homing.html
[17:17:03] <berny83> yes, a lot of times
[17:17:40] <berny83> i could explain you the behaviour of the cnc
[17:18:13] <berny83> when i open the axis (software) x, y and z are in 0,0,0. actually the machine could be whereever in the work volume, ok?
[17:18:46] <berny83> the 0,0,0 shown by the axis is not home position ok? they are now relative to a random position of the machine
[17:19:02] <CaptHindsight> IchGuckLive: I seem to see more high tech and software co's from your area and south to Freiburg. Is that sort of the high tech belt of Germany or just coincidence?
[17:19:02] <berny83> I homing the axis (now i'm trying with only the X) and it perform the rigth procedure but at the end it come back to the original 0,0,0 position
[17:19:59] <IchGuckLive> CaptHindsight: no its the way it is in germany
[17:20:39] <IchGuckLive> berny homeoffset is the gole not home
[17:21:25] <berny83> what does it means?
[17:22:16] <berny83> i start from a random position when i turn on the machine, with homing I suppose to reach a known position (the 0,0,0 origin of the machine)..
[17:22:16] <berny83> is it wrong?
[17:22:39] <IchGuckLive> you need to drive your mashine away from home switch witch is your index pulse
[17:22:41] -!- sirdancealo2 [sirdancealo2!~sirdancea@194.228.11.188] has joined #linuxcnc
[17:22:56] <IchGuckLive> pulse index + homeswitch is the hoome
[17:23:47] <berny83> yes, the axis travel to hit the mechanical switch with searchvel velocity and then get the indexpulse with latch velocity
[17:23:56] <berny83> but it does not stop there!
[17:24:13] <berny83> it continue travelling to the original position!
[17:24:43] <berny83> and i can't explain to me why...
[17:25:40] <berny83> i don't know the reason for this last travel (performed at home_final_vel as if it was an home_offset)
[17:25:51] <berny83> but home = 0 and home_offset = 0 too
[17:26:50] <IchGuckLive> shoudt not be the same
[17:27:32] <IchGuckLive> get home -5mm and home 0
[17:27:55] <IchGuckLive> if your switch is at negativ X
[17:28:52] <berny83> yes, my switch is in the negative X direction
[17:29:03] <IchGuckLive> berny83: on the axis in the ini HOME_USE_INDEX = YES
[17:29:06] <berny83> i've an index pulse every 5mm
[17:29:17] <berny83> yes i do it
[17:29:50] <berny83> if i set "NO" homing occur with only mechanical switch (and works fine!)
[17:30:36] <berny83> if i set it to "YES" axis get the pulse but does not stop on it!
[17:32:41] <IchGuckLive> there is no stop
[17:33:17] <IchGuckLive> it only sets the value of homeofset to the DRO and trevels towards home
[17:33:21] <berny83> it stops on the original position
[17:33:29] -!- grummund [grummund!~user@unaffiliated/grummund] has joined #linuxcnc
[17:33:37] <IchGuckLive> as it shoudt do
[17:33:57] <berny83> but home_offset is zero
[17:34:07] <IchGuckLive> as it shoudent be
[17:34:55] <berny83> so why axis does not stop on pulse but come back to the original position (an put there the axes origin)
[17:35:10] <berny83> why you say that?
[17:35:18] -!- toner has quit [Ping timeout: 252 seconds]
[17:35:31] <IchGuckLive> berny did you looke at page 24 in the integreader manual
[17:35:55] <IchGuckLive> trvel means a t least 2 steps
[17:36:25] <IchGuckLive> berny are you german ?
[17:36:25] <CaptHindsight> http://www.bunniestudios.com/blog/?p=3110 Form1 teardown (SLA 3d printer using 405nm bluray laser and cheap galvos)
[17:36:40] <berny83> sorry?
[17:36:57] <IchGuckLive> language of country you are in
[17:37:18] <IchGuckLive> CaptHindsight: you can get this for 10USD
[17:37:35] -!- kwallace2 [kwallace2!~kwallace@smb-235.sonnet.com] has joined #linuxcnc
[17:37:36] <IchGuckLive> as there are som tray loose blue rays
[17:38:11] <berny83> no, i'm italian
[17:38:22] <IchGuckLive> ok
[17:38:28] -!- probotix has quit [Ping timeout: 246 seconds]
[17:38:32] <berny83> what means 2 steps?
[17:38:46] <IchGuckLive> http://wiki.farmbot.it/Welcome
[17:39:27] <IchGuckLive> berny83: there needs to be a travel space between home and homeofset if you use index
[17:39:46] <IchGuckLive> it simply can not be the same number
[17:39:59] <berny83> why?
[17:40:22] <CaptHindsight> heh, the Form 1 also uses a STM32 32-bit ARM Cortex-M3. Why does everyone want to reinvent the wheel so often?
[17:41:17] <andypugh> I think with index you can have them in the same place, the slow back-off move should continue until the switch is released, and then carry on until the index.
[17:41:37] <berny83> yes
[17:41:38] <kwallace2> I just tried my home, it starts at home, moves quickly off home and encoder index, moves slowly to trip home , then encoder index and stops.
[17:41:39] <berny83> exactly
[17:41:40] -!- ler_hydra [ler_hydra!~ler_hydra@sailor-link.olf.sgsnet.se] has joined #linuxcnc
[17:41:45] <andypugh> I do wonder if it isn't seeing the index, and is carrying on and than giving up.
[17:41:53] <berny83> but then it mus stop on pulse
[17:42:12] <andypugh> There is a final rapid move to the home position.
[17:42:52] <IchGuckLive> andypugh: thats what i try to fid out by home 0 homeofset -5
[17:42:59] <kwallace2> Mine moves slowly to home then index.
[17:43:03] <berny83> yes, but the home position for my emc is the original one, not the position written in the in file (0)
[17:43:19] <andypugh> If you had home as zero and home offset of (total travel / 2) then you would expect to see what you are seeing, but I don't thnk that is your setup.
[17:43:49] <kwallace2> How far and fast is the last move?
[17:44:11] <berny83> the last move is at home_final_vel velocity
[17:44:31] <kwallace2> How far?
[17:44:32] <andypugh> It might be interesting to halscope the home-state pin.
[17:44:55] <IchGuckLive> im off by
[17:44:59] -!- IchGuckLive has quit [Quit: ChatZilla 0.9.87 [Firefox 20.0/20130329043827]]
[17:45:03] <berny83> do you mean home-x?
[17:46:05] <kwallace2> How far does x move on the last move?
[17:47:13] -!- toner [toner!~ink@c-50-150-125-200.hsd1.ca.comcast.net] has joined #linuxcnc
[17:47:47] <berny83> it return in the original position that had when the machine was off
[17:48:26] <berny83> if i turn on the machine with the axis at half stroke, after homing axes return at half stroke
[17:48:47] <andypugh> There is a axis.N.home-state parameter that you may be able to halscope to see what is going on.
[17:49:01] <kwallace2> Okay how far does each move take? Is it less than 5mm?
[17:49:23] <berny83> no, much more
[17:50:06] -!- stsydow has quit [Remote host closed the connection]
[17:50:19] <berny83> axis.0.homed and axis.0.homing
[17:50:26] <kwallace2> andypugh: Is there a way to record a HALscope Roll?
[17:50:29] <andypugh> The meaning of the home-state pin is here:
http://git.linuxcnc.org/gitweb?p=linuxcnc.git;a=blob;f=src/emc/motion/motion.h;h=435eac7e80a1bc439555f73db240848079ab719a;hb=HEAD#l403
[17:50:30] <berny83> which one?
[17:50:48] <andypugh> kwallace2: Yes, you can save the trace from the file menu (IIRC)
[17:51:26] <kwallace2> My homing doesn't fit in the normal capture time.
[17:52:09] <berny83> my too
[17:52:29] <andypugh> kwallace2: You can change the sampling period to be every N thread cycles to record for longer
[17:52:51] <kwallace2> Cool, I'll look.
[17:53:59] <archivist> andypugh, what was the "have you got a slip" comment about last night ?
[17:54:00] <andypugh> The button that says something like "4000 samples in 4 seconds" can be pushed to change the numbers
[17:54:25] <kwallace2> Ah, in Multiplier.
[17:55:04] <andypugh> archivist: You can use slip gauges to extend the range of your DTI (or you could offset the measurements by a known amount, to see if the sawtooth is measurement device or machine
[17:55:58] <archivist> andypugh, I know the source of the saw tooth, its stepper frequency related
[17:56:09] <berny83> guys, i've to go to dinner, thanks a lot to all of you! i will back soon
[17:56:31] <archivist> andypugh, I updated that page with more info
[18:00:41] -!- berny83 has quit [Ping timeout: 250 seconds]
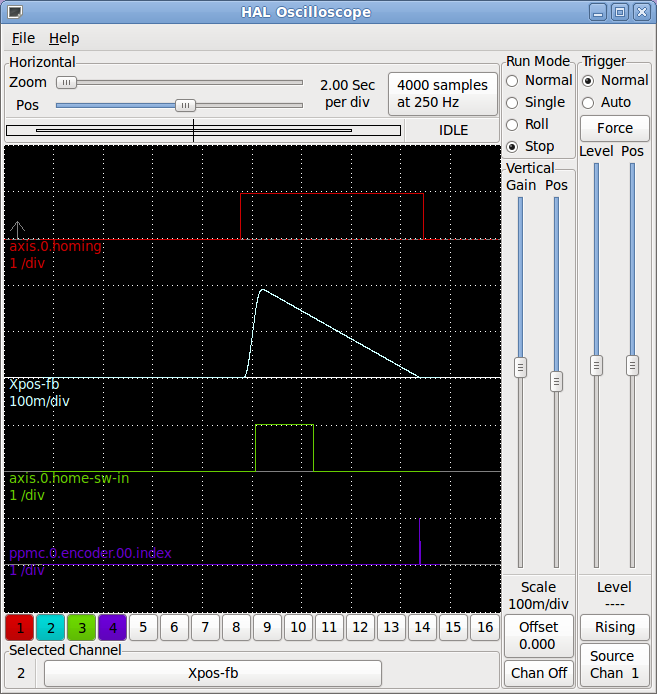
[18:05:16] <kwallace2> Here is my HNC homing:
http://www.wallacecompany.com/machine_shop/LinuxCNC/Screenshot-HAL%20Oscilloscope.png
[18:06:01] <archivist> he just fell off irc
[18:07:00] <kwallace2> Okay.
[18:10:39] <Tom_itx> hope he had his chute open
[18:10:59] -!- adb [adb!~IonMoldom@2a02:1205:501a:f300:baac:6fff:fe67:305f] has joined #linuxcnc
[18:28:52] -!- Nick001-shop [Nick001-shop!~chatzilla@clsm-74-212-61-47-pppoe.dsl.clsm.epix.net] has joined #linuxcnc
[18:31:27] -!- gambakufu has quit [Read error: Connection reset by peer]
[18:46:35] -!- phantoneD [phantoneD!destroy@a89-154-113-87.cpe.netcabo.pt] has joined #linuxcnc
[18:50:06] -!- phantoxeD has quit [Ping timeout: 252 seconds]
[18:53:41] -!- erasmo [erasmo!~erasmo@213.146.55.219] has joined #linuxcnc
[18:54:06] -!- gambakufu [gambakufu!~ah@bzq-84-110-35-236.red.bezeqint.net] has joined #linuxcnc
[18:55:36] -!- mhaberler has quit [Ping timeout: 245 seconds]
[18:56:58] -!- chillly has quit [Ping timeout: 256 seconds]
[19:03:54] -!- gambakufu has quit []
[19:10:04] -!- gambakufu [gambakufu!~ah@bzq-84-110-35-236.red.bezeqint.net] has joined #linuxcnc
[19:19:34] -!- flippyhead has quit [Quit: flippyhead]
[19:29:27] <andypugh> kwallace2: I am going to guess that that was not the first home?
[19:30:53] -!- psha has quit [Quit: Lost terminal]
[19:32:42] <kwallace2> andypugh: How so?
[19:33:20] <andypugh> Position-fb hits 0 exactly at the index. I think that you would normally see a step-change at index.
[19:35:07] <kwallace2> Actually, I had done several at that point, but more often than not, the carriage is at home when I power up.
[19:38:21] -!- _1SheYode [_1SheYode!~ah@bzq-84-110-35-236.red.bezeqint.net] has joined #linuxcnc
[19:38:43] -!- gambakufu has quit [Ping timeout: 240 seconds]
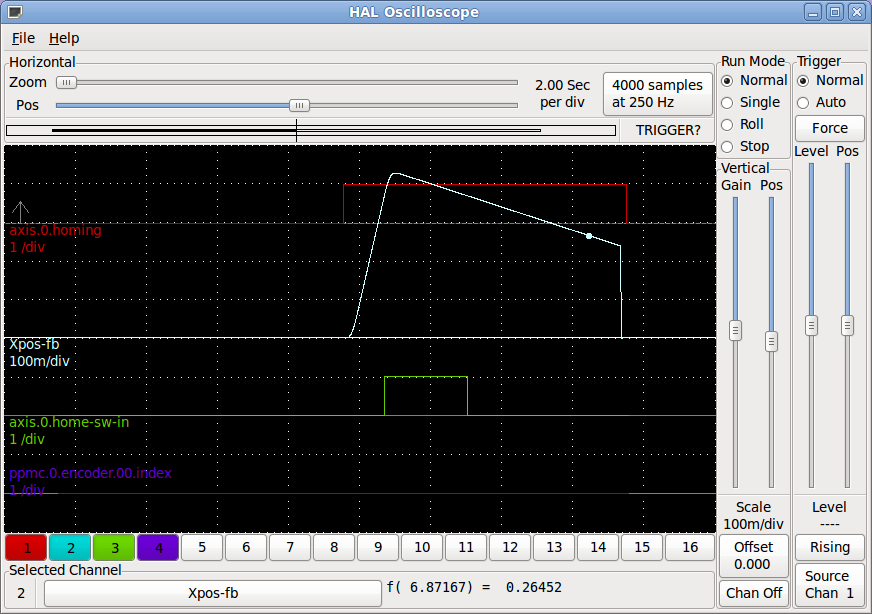
[19:43:25] <kwallace2> andypugh: Better?
http://www.wallacecompany.com/machine_shop/LinuxCNC/Screenshot-HAL%20Oscilloscope-1.png
[19:43:47] <andypugh> Aye that is more like what I woud expect to see.
[19:44:17] <andypugh> Though there is no rapid-to-home?
[19:47:14] <kwallace2> The last move is slow.
[19:48:43] <kwallace2> Otherwise, it misses the narrow index.
[19:48:55] -!- zlog has quit [Remote host closed the connection]
[19:49:07] -!- zlog [zlog!~zlog@ip68-102-199-165.ks.ok.cox.net] has joined #linuxcnc
[19:51:44] -!- berny83 [berny83!5dbc7302@gateway/web/freenode/ip.93.188.115.2] has joined #linuxcnc
[19:56:13] <berny83> is there anyone that can help me in homing troubles (mechanical switch + indexpulse homing)?
[19:56:26] <ries> berny83: what's the question?
[19:57:36] <berny83> i cannot perform homing correctly because the homing procedure is not correct, i give you an example
[19:58:05] <berny83> 1 - I switch on emc (axis) software
[19:59:01] <berny83> 2 - suppose axes could be anywhere in the working area (just supppose they are in 100,100 coordinates)
[20:00:37] <berny83> 3 - axis show me that coordinates are 0,0 and that there not be home (obviously it show 0,0 because it cannot know the actual position of the axes)
[20:01:11] <berny83> 4 - i perform homing (suppose i'm working only on X axis)
[20:01:34] <berny83> 5 - axis X go back looking for mechanical home switch
[20:01:53] <berny83> with searchvel velocity
[20:02:10] <berny83> 6 - axis X hits mech switch
[20:02:56] <berny83> 7 - axis X go forward (ascending X coordinates) looking for index pulse with latchvel velocity
[20:03:16] <berny83> 8 - axis X find index pulse
[20:03:36] <berny83> 9 - axis X "should" stop on index pulse
[20:04:32] <berny83> 10 - Instead stopping, axis X go to the original position (100,100) with home final vel velocity
[20:04:53] <ries> are you sure it's not a setting you told AXIS to go to?
[20:04:57] -!- mhaberler [mhaberler!~mhaberler@extern-177.stiwoll.mah.priv.at] has joined #linuxcnc
[20:05:09] <ries> because , it doesn't have to stop, you can tell axis to move towards some position
[20:05:11] <berny83> the question is: why axis X does not stop on index pulse but travel to that position
[20:05:12] <berny83> ?
[20:05:44] <berny83> where that setting could be?
[20:06:50] <ries> I believe it's called HOME
[20:06:53] <berny83> I think it's not related to Home and Home_offset in ini file because they are fixed values while the travel is always different and equal to the original position..
[20:08:02] <berny83> I'm looking for someone who know how linuxcnc thinks while performs homing using index pulse
[20:09:04] <ries> so, you say if you move to X/Y (let's assume machine cordinates then) then after homing it will go back to 200,200 ?
[20:12:17] <berny83> not exactly ries, if you move to 200,200 axis show you coordinates 200,200; but if you then reboot the machine, axes are still in 200, 200 while axis show you 0,0. Ok? In this case if I perform homing, axes come back in 200,200 and emc (obviously) shows me 0,0 coordinates
[20:14:03] <Tom_itx> berny83, did you use the HOME_USE_INDEX var in the ini file?
[20:14:13] <Tom_itx> http://www.linuxcnc.org/docs/2.4/html/config_ini_homing.html
[20:14:14] <berny83> yes
[20:17:11] <ries> I have a hard time trying to understand what's going on… homing has been pretty much automatic for me so it's not something I take notice of, I frequently walk away while the machine does what it does
[20:17:47] <Tom_itx> is the home switch releasing before the index pulse is triggered?
[20:18:11] <Tom_itx> diagram 3 in that link
[20:19:24] <berny83> yes
[20:19:32] <berny83> it's that diagram
[20:20:07] <Tom_itx> i don't use an index pulse so i'm not much help
[20:21:23] -!- bootnecklad [bootnecklad!~bootneckl@host-92-18-1-212.as13285.net] has joined #linuxcnc
[20:23:00] -!- bootnecklad has quit [Client Quit]
[20:24:16] <ries> berny83: on step 9 you assume that the axis should stop. Why is that? For me I need to get out of the because I need home a other location. Mind you, I did put all my switches in serial so I need to be ensured that I don't keep one sqwitch activated
[20:24:55] <ries> The onyl reason I can think of that what happens in step 10 happens is because you set HOME and HOME_OFFSET
[20:25:36] <berny83> but they are both set to zero..
[20:26:05] <pcw_home> If this is a step driven system and you use encoder feedback you must use velocity mode for the stepgens
[20:30:12] <ries> berny83: I wonder if it's related to this text in the doc : Note that even if this parameter is the same as HOME_OFFSET, the joint will slightly overshoot the latched position as it stops.
[20:30:27] <ries> Not sure of 100 is considered 'slighly overshoot' :D
[20:30:41] <berny83> sure :D
[20:32:13] <berny83> but the very strange thing is that the value (100 in this case) is not random but it is the position of the machine when it has been turned on
[20:36:39] <ries> well, Axis does remember some coordinates, even if you turn off/on the machine.. I'ts been a while since I setup my machine though, so I have a hrd time visualizing what's happening.
[20:37:00] -!- maximilian_h [maximilian_h!~bonsai@130.255.104.21] has joined #linuxcnc
[20:37:05] -!- maximilian_h [maximilian_h!~bonsai@130.255.104.21] has parted #linuxcnc
[20:38:02] <ries> berny83: try to set a HOME, see if that make a difference
[20:40:09] <berny83> no difference, the only difference is that when it get the home it set the value not to zero but to the HOME value
[20:40:52] <pcw_home> If this is a step driven system and you use encoder feedback you must use velocity mode for the stepgens
[20:41:42] -!- ler_hydra has quit [Remote host closed the connection]
[20:43:13] -!- terabyte- [terabyte-!~terabyte@c-76-108-132-114.hsd1.fl.comcast.net] has joined #linuxcnc
[20:44:02] -!- _edward_ [_edward_!~quassel@184.17.205.33] has joined #linuxcnc
[20:45:03] -!- odogono has quit [Quit: odogono]
[20:45:20] <pcw_home> otherwise all bets are off for homing to index
[20:47:06] <andypugh> True, I have been assuming that this is a servo system.
[20:48:15] <andypugh> berny83: Can you halscope axis.0.homing-state and find out what the homing-state is during the return move?
[20:49:13] <berny83> sure, but not now, I'm at home, tmorrow morning at work i'll try
[20:49:46] <berny83> I have a servo system driven by step dir commands
[20:49:50] <pcw_home> are the stepgens in velocity mode?
[20:50:05] <berny83> how can I check that?
[20:50:16] <pcw_home> check your hal file
[20:51:29] <berny83> do you mean control type?
[20:51:41] <pcw_home> yes
[20:52:07] -!- Nick001 has quit [Ping timeout: 272 seconds]
[20:52:13] <pcw_home> also if you have the stepgen.fb connectd to _anything_ its wrong
[20:52:40] <berny83> this is set to 1 (vel mode)
[20:53:33] <andypugh> Does the encoder counter go to zero on index?
[20:54:31] <berny83> the only pin i've connected from the encoder is the index pin
[20:54:32] <andypugh> How are you counting encoder pulses?
[20:54:41] <berny83> I do not count them
[20:54:43] <andypugh> That won't work.
[20:55:39] <berny83> but using servo as step/dir does not means use "perfect" open loop stepper?
[20:56:01] <andypugh> Actually, I should say "I don't think that will work". My impression is that index homing relies on the encoder counts going to zero when the index is seen.
[20:56:31] <berny83> mmmm
[20:56:37] <andypugh> Yes, you have a perfect open-loop stepper. You can't do index-homing with a stepper.
[20:57:07] -!- Nick001 [Nick001!~Nick001@clsm-74-47-112-8-pppoe.dsl.clsm.epix.net] has joined #linuxcnc
[20:57:38] <pcw_home> Its possible but the system must be set up like a velocity mode servo
[20:57:53] <berny83> why not? If i link rigth wires... it's a software not a human mind.. :p
[20:58:09] <andypugh> This is not to say that you can't use the index pulse to improve the accuracy of homing, but it is not as simple as an INI file entry.
[20:58:14] <pcw_home> with PID loops, and the stepgens run in velocity mode
[20:58:45] <pcw_home> more things happen on index that you are aware of...
[20:58:55] <andypugh> To run the step-servo as a velocity-mode servo then there also needs to be encoder counters in the LinuxCNC world.
[20:59:01] <berny83> I would take PID control in servo system (not in linuxcnc) and use only the index pulse to better homing
[20:59:22] <pcw_home> wont work
[20:59:29] -!- afiber__ has quit [Quit: Konversation terminated!]
[20:59:55] <berny83> it's a shame because I was very close to a solution...
[21:00:04] <andypugh> pcw_home: Well, it could work. But would need cleverness in HAL to hold the home-sw pin high until the index pulse is seen.
[21:00:18] <pcw_home> its more than that
[21:00:19] <berny83> index pulse has been recognised
[21:00:25] <_DJ_> gn8
[21:01:08] -!- kiw has quit [Ping timeout: 240 seconds]
[21:01:16] <berny83> only a little step and everythings will work fine....
[21:01:19] <andypugh> pcw_home: Indeed, you can't use HOME_TO_INDEX (or whatever the INI fle entry is). You need to meddle with the home-switch inputs in HAL
[21:01:25] -!- _DJ_ has quit [Quit: bye]
[21:01:26] <pcw_home> might be possible if the search for index is really slow
[21:01:48] <pcw_home> (might be useable)
[21:01:55] <andypugh> Yes, the latch move has to be slow enough to absolutely guarantee always seeing the index pulse.
[21:02:29] <andypugh> berny83: Are you using software step generation?
[21:02:33] <berny83> but in velocity mode it is not the same??
[21:02:37] <pcw_home> The index pulse cannot be lost as it always clears index ena
[21:02:39] <pcw_home> what is lost is the encoder count at index
[21:03:06] -!- _edward_ has quit []
[21:03:21] <berny83> i use 5i23 mesa board with hostmot2 for step generation
[21:03:21] <andypugh> In velocity mode you are using pulse-rate as a motor velocity comand, and all the position feedback etc happens in HAL with that PID and the HAL encoder counter.
[21:03:31] <andypugh> Ah, well, in that case....
[21:04:04] <andypugh> What sevo drives are you using?
[21:04:13] <pcw_home> there is firmware support for index on stepgens but its not supported
[21:04:58] <berny83> Delta AC servo system ASDA-B2
[21:05:15] <pcw_home> if you do the position loop in linuxCNC you can check on your actual following error
[21:06:00] <andypugh> The drives will take analogue command (torque or velocity)>
[21:06:23] <berny83> yes but they take also step dir command
[21:07:03] <berny83> and i use them because i'm more confident with this kind of command
[21:07:15] <andypugh> If you have a Mesa card then you can see step-dir as merely a very silly sirt of velcoity command.
[21:08:02] <andypugh> You have two choices (and it seem that you are trying to run a system that is half-way between the two).
[21:08:04] -!- njh [njh!~njh@pdpc/supporter/professional/njh] has joined #linuxcnc
[21:08:34] <njh> Hello, I have just been trying out Touchy on my 'new' touch screen
[21:08:40] <berny83> and i've never use analog command (i don't know if i could use 5i23 for analog command)
[21:09:09] <andypugh> 1) Run the system as a stepper system. All motion control is in the drive. If you want to use the encoders as index, then that needs a very slow latch move and some HAL logic.
[21:09:12] <njh> which is 1024x768 but the Touchy window is bigger than 1024x768 - can idea how to make it fit on the screen?
[21:09:51] <berny83> sure, my half-way will carry me in troubles.. i know
[21:10:04] <pcw_home> Yes the homing logic in motion assumes a servo system with encoder feedback to LinuxCNC
[21:10:22] <t12> pcw: i scoped out the communications from that mitsubishi encoder
[21:10:32] <pcw_home> This may be the best solution (and keep your drives honest)
[21:10:35] <andypugh> 2) Run the system as a PID servo system, with either velocity mode stepgens or analogue commands. This requires PID counters in LinuxCNC and encoder counters. You have a Mesa card, so at least we can be cnfident that you can accurately count the encoder pulses.
[21:10:36] <t12> it appears to be somehow both half and full duplex rs485
[21:11:03] <pcw_home> has RX and TX pairs?
[21:11:06] <t12> yeah
[21:11:14] <t12> it appears to do half duplex on one pair
[21:11:19] <t12> and the motor tx ALSO goes on the other pair
[21:11:23] <pcw_home> Ahh
[21:11:31] <t12> https://www.dropbox.com/sc/5skqj6nm3oc7c3m/vyunJ2h_oD
[21:11:34] <t12> +-5V
[21:11:38] <andypugh> njh: I think that it is the text-height setting in the config screen, but it has been a while
[21:11:50] <t12> i can see the binary counting for encoder position so i'm assuming its not grey/manchester/whatever encoded
[21:12:04] <andypugh> njh: Playing with the DPI setting in Linux generally might help too.
[21:12:26] <t12> the half duplex line always seems to have that noise spike during what i think is the rx/tx switchover in half duplex
[21:12:45] <berny83> delta driver could give me pulse index also as open collector source...
[21:13:05] <berny83> i don't know if this is an advantage for me
[21:13:36] <t12> i ordered a rs485/usb thing which hopefully I can rig to sniff the bus convinently. The only unknown part is the likely checksum at the end of the transmission, but theres only so many checksum algs
[21:14:37] <njh> andypugh: will give it a go but it was the width that was the problem, not the height
[21:14:38] <pcw_home> Theres a CRC reverse enginnering program I used
[21:14:47] <t12> maybe thats actually +-3.3
[21:15:04] <andypugh> berny83: For the stepper-mode solution you can probably use
http://www.linuxcnc.org/docs/html/man/man9/flipflop.9.html to mediate the home switch signal. Wire clock and set to the switch, and then reset to the index. It will go high and stay high on the home-switch, then go low on the index pulse.
[21:15:16] <t12> that would be useful!
[21:15:35] <t12> i figured i could also arrange for a mesa card to be a rs485 sniffer, but i'm guessing it would take a fair amount of effort
[21:15:47] <andypugh> njh: DPI setting may be the solution then
[21:15:52] <pcw_home> reveng_crc maybe
[21:16:04] <pcw_home> Whats the data rate?
[21:16:23] <andypugh> t12: We have a driver for the Mesa UART module.
[21:16:51] <berny83> guys this is too advanced for me!! I'm a little scared..
[21:16:58] -!- hashfail [hashfail!~noone@unaffiliated/gimps] has joined #linuxcnc
[21:17:29] <andypugh> berny83: In that case you will have to give up on using the index for homing.
[21:17:34] <pcw_home> looks a little like 2 mbits/sec or so
[21:17:58] <pcw_home> or set the hal file up like a normal velocity mode servo
[21:17:58] <berny83> I have to go step by step, first understanding the logic, then I will study the "tools" for write that logic
[21:18:08] <andypugh> berny83: It can be done, but you are trying to use Index on a stepper system, and that is advanced.
[21:19:02] <andypugh> Do the drives support any sort of homing behaviour?
[21:19:21] <berny83> good question
[21:19:22] <t12> trying to eyebal from those traces
[21:19:41] <andypugh> (Basically you are trying to run the system open-loop, so that means that homing has to be in the drive, not in LinuxCNC)
[21:20:05] <pcw_home> T12: need a litte expansion/cursors
[21:20:23] -!- Valen [Valen!~Valen@c211-28-237-68.blktn6.nsw.optusnet.com.au] has joined #linuxcnc
[21:20:32] -!- Cylly [Cylly!cylly@p54B11220.dip0.t-ipconnect.de] has joined #linuxcnc
[21:20:33] <berny83> i check it immediatly
[21:20:35] -!- Loetmichel has quit [Read error: Connection reset by peer]
[21:20:52] <t12> yeah
[21:20:58] <t12> am not at scope right now, will recapture this even
[21:21:06] <t12> eve
[21:21:45] <pcw_home> might be kind of like the Fanuc (async but weird number of bits)
[21:22:27] <pcw_home> if you can see a binary count, then thers no embedded clock info so it may well be async
[21:22:34] <berny83> delta drivers seems to be not able to perform homing procedure
[21:23:15] <t12> i know if i fiddle with the shaft i see what i assume to be just the lsb's and crc changing
[21:23:36] <t12> large turns then affect the msb side
[21:30:07] -!- chillly has quit [Quit: Leaving]
[21:33:56] -!- Felix29 [Felix29!Felix@c-71-193-105-131.hsd1.in.comcast.net] has joined #linuxcnc
[21:36:45] -!- adb has quit [Ping timeout: 252 seconds]
[21:38:16] -!- terabyte- has quit [Quit: terabyte-]
[21:40:45] <pcw_home> can you figure out what triggers the data transfer?
[21:41:01] -!- WalterN has quit [Quit: Leaving]
[21:47:10] -!- Felix29 [Felix29!Felix@c-71-193-105-131.hsd1.in.comcast.net] has parted #linuxcnc
[21:47:18] <pcw_home> reveng.sourceforge.net is the crc tool
[21:49:30] -!- terabyte- [terabyte-!~terabyte@c-76-108-132-114.hsd1.fl.comcast.net] has joined #linuxcnc
[21:51:58] -!- AR__ has quit [Read error: Connection reset by peer]
[21:53:50] -!- WalterN [WalterN!~luna@or-76-2-16-221.dhcp.embarqhsd.net] has joined #linuxcnc
[22:04:03] <t12> i think its an approx 1byte xmit from the controller
[22:04:33] <t12> https://www.dropbox.com/sc/5skqj6nm3oc7c3m/vyunJ2h_oD#lh:0-2013-10-12%2023.12.38.jpg is the motor sending position
[22:04:48] <t12> https://www.dropbox.com/sc/5skqj6nm3oc7c3m/vyunJ2h_oD#lh:1-2013-10-12%2023.21.32.jpg is the control sending request, and the motor sending position on the same line
[22:05:12] <t12> the big spike in trace 2 is about where the controller tx ends and the motor tx begins
[22:09:08] <t12> thnx for the crc tool
[22:09:11] <t12> that is max useful in general
[22:09:15] <pcw_home> what is m2?
[22:09:41] <pcw_home> looks like TX and RX
[22:10:05] <t12> m2 is 1-2
[22:10:44] <t12> or 2-1, whatever order it was
[22:11:17] <pcw_home> OK
[22:11:18] <t12> so should be the de-differentiald data
[22:11:53] <pcw_home> yeah so what other signal is used?
[22:12:08] <t12> so theres MD MDR MR MRR
[22:12:18] <t12> the traces in the dropbox are each
[22:12:29] <t12> the responses from motor appear to be transmitted on BOTH
[22:12:35] <t12> btu the controller only sends requests on one
[22:12:42] <t12> i'm assuming this is some leftover backwards compatability stuff
[22:12:59] <pcw_home> yeah maybe so
[22:13:18] <t12> or maybe they have multiple controllers that talk to the motor and some want to do full duplex
[22:13:47] <t12> the rest of the pins are power related, battery, logic power, cable shield, logic ground
[22:14:06] <pcw_home> I have a 400W Yaskawa servo motor that has a single (I assume RS-485) pair for encoder connection
[22:14:07] <pcw_home> its may well be similar
[22:14:09] <t12> alot of transients show up on them
[22:14:34] <t12> i also found a random renishaw doc
[22:14:38] -!- |1li has quit [Ping timeout: 240 seconds]
[22:14:41] <t12> that implies that the melservo encoders are rs485
[22:14:47] <pcw_home> They will be a lot noisier whin the m otor running
[22:14:54] <t12> for some linear encoder product they sell that interfaces with them
[22:15:36] <t12> http://resources.renishaw.com/download.aspx?lang=en&data=23138
[22:15:48] <pcw_home> the transient is probably easily maskable as the start bit detection logic can be held off
[22:15:51] <t12> last page
[22:17:53] <t12> will there be issues getting mesa serial to deal with the maybe asynch nature of the protocol?
[22:19:23] <pcw_home> Looks like theres just a 1/2 and full duplex option
[22:20:25] <pcw_home> its probably most easlily done as a varient of the Fanuc (looks like a clone)
[22:24:01] <WalterN> herm
[22:24:26] <WalterN> looking for a BT40 Coolant Inducer tool holder
[22:24:48] <WalterN> kinda hard to find... I see a bunch of CAT Coolant Inducers..
[22:25:02] <uw> make one
[22:25:11] <uw> with cnc abilities
[22:26:47] <WalterN> and magical unicorn horn
[22:28:53] <uw> *~you gotta believe~*~
[22:30:13] <WalterN> http://www.youtube.com/watch?v=9auOCbH5Ns4
[22:30:36] <WalterN> lol
[22:41:53] <uw> lol that weebl guy must have made 1000 videos
[22:42:03] -!- stsydow has quit [Quit: Leaving]
[22:42:12] -!- The_Ball has quit [Ping timeout: 252 seconds]
[22:43:56] <njh> andypugh: changing fonts from 90 dpi to 72 dpi fixed it, thanks!
[22:45:01] <andypugh> WalterN: BT and CAT are the exact same taper.
[22:45:07] <andypugh> Not sure that helps.
[22:45:22] <WalterN> they will fit in the holders too evidently
[22:46:03] <WalterN> just not in the carousel
[22:46:44] <andypugh> My machine was built as 30INT, but I added a pneumatic drawbar for BT30, so then it was BT30. Then I got a whole load of SK30 holders cheap, so I shortened one drive dog and now I have a hybrid that takes SK30 holders with BT30 pull-studs :-)
[22:47:53] <WalterN> :3
[22:49:55] -!- NickParker|2 [NickParker|2!~kvirc@c-24-6-124-113.hsd1.ca.comcast.net] has joined #linuxcnc
[22:54:01] -!- mhaberler has quit [Quit: mhaberler]
[22:54:45] -!- erasmo has quit [Remote host closed the connection]
[23:01:18] <pcw_home> t12 do you have a encoder PN? maybe I can snag on on Ebay
[23:01:28] <pcw_home> one on
[23:05:31] -!- terabyte- has quit [Quit: terabyte-]
[23:05:44] -!- Valen has quit [Quit: Leaving.]
[23:06:28] <t12> I'll check when I get home, I think they're sold coupled to the motors only
[23:07:19] <t12> the wee little motors on ebay seem to be in the 75-100 range shipped
[23:08:11] <t12> http://www.ebay.com/itm/MITSUBISHI-HC-KFS053-MELSERVO-AC-Servo-Motor-50W-3000r-min-a25-/160906864246?pt=LH_DefaultDomain_0&hash=item2576cbe676
[23:08:22] <t12> i _think_ that whole series uses the same encoder but not sure
[23:13:25] -!- Vq has quit [Ping timeout: 246 seconds]
[23:14:28] -!- terabyte- [terabyte-!~terabyte@c-76-108-132-114.hsd1.fl.comcast.net] has joined #linuxcnc
[23:17:30] -!- Vq [Vq!~vq@81-225-108-241-no123.tbcn.telia.com] has joined #linuxcnc
[23:24:02] <WalterN> what does this do?
http://www.ebay.com/itm/Transformer-34-KVA-SQUARE-D-460V-pri-230V-sec-3-ph-34T143HDIT-5366-/280909595442?pt=BI_Circuit_Breakers_Transformers&hash=item4167844332
[23:26:08] <toastyde1th> it's a three phase, 460v to 230v transformer
[23:26:36] <WalterN> so 460 from the power company comes in, and 230 goes out
[23:26:41] <WalterN> can it be the other way around?
[23:27:33] <toastyde1th> yes
[23:29:08] -!- ravenlock [ravenlock!~ravenlock@pool-71-170-153-250.dllstx.fios.verizon.net] has joined #linuxcnc
[23:29:16] -!- ravenlock has quit [Changing host]
[23:29:16] -!- ravenlock [ravenlock!~ravenlock@enlightenment/developer/ravenlock] has joined #linuxcnc
[23:29:56] -!- The_Ball [The_Ball!~ballen@pa49-187-165-100.pa.nsw.optusnet.com.au] has joined #linuxcnc
[23:30:38] -!- ve7it has quit [Remote host closed the connection]
[23:30:44] -!- AR_ [AR_!~AR@24.238.71.107] has joined #linuxcnc
[23:31:18] -!- _edward_ [_edward_!~quassel@184.17.205.33] has joined #linuxcnc
[23:31:42] -!- ve7it [ve7it!~LawrenceG@S01060014d19d0b68.pk.shawcable.net] has joined #linuxcnc
[23:33:14] -!- Connor has quit [Ping timeout: 264 seconds]
[23:34:38] -!- Connor [Connor!~Connor@75.76.30.113] has joined #linuxcnc
[23:36:09] -!- terabyte- has quit [Quit: terabyte-]
[23:37:28] -!- asdfasd has quit [Ping timeout: 256 seconds]
[23:38:14] -!- Felix29 [Felix29!Felix@c-71-193-105-131.hsd1.in.comcast.net] has joined #linuxcnc
[23:38:40] -!- Laremere has quit [Remote host closed the connection]
[23:39:41] -!- terabyte- [terabyte-!~terabyte@c-76-108-132-114.hsd1.fl.comcast.net] has joined #linuxcnc
[23:45:03] -!- thomaslindstr_m has quit [Remote host closed the connection]
[23:45:40] -!- einar has quit [Quit: Leaving]
[23:53:43] -!- awyea [awyea!4707382a@gateway/web/freenode/ip.71.7.56.42] has joined #linuxcnc
[23:54:25] <awyea> anybody have any experience with BBB and linuxcnc? i want to run the stepconf wizard
[23:56:11] -!- ve7it has quit [Remote host closed the connection]
[23:59:35] -!- rob_h has quit [Ping timeout: 272 seconds]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}