Back
[00:00:10] <anonimasu> i use my vise about 30% of the time and the clamps 50%
[00:00:27] <alex4nder> anonimasu: so just clamp directly into the table using the t-slots?
[00:00:33] <anonimasu> yeah
[00:00:36] <nicko> %20 of the time you build your own jigs ?
[00:00:39] <anonimasu> yeah
[00:00:47] <nicko> vacuum tables also ;)
[00:00:57] <alex4nder> haha I'm too much of a noob for a vacuum table
[00:01:05] -!-
robh__ has quit [Ping timeout: 260 seconds]
[00:01:18] <nicko> they're easier than you think !
[00:01:36] <Tom_itx> noisy
[00:01:45] <anonimasu> the rest of the time ends up with something machined to fit my part and clamps to hold it stuck
[00:01:48] <anonimasu> or in the vise
[00:02:17] <anonimasu> also, you can use the clamps as improvised jig's alot of times
[00:02:21] <nicko> I'd say %50 of the time I get more pleasure making the work holding part than the part
[00:03:41] -!-
theorb [theorb!~theorb@91.84.53.6] has joined #emc
[00:03:47] * anonimasu goes off to bed
[00:04:08] -!-
theorbtwo has quit [Ping timeout: 240 seconds]
[00:04:19] theorb is now known as
theorbtwo
[00:04:53] <Tom_itx> anonimasu
[00:04:57] <alex4nder> anonimasu: thanks for the input.
[00:05:05] <Tom_itx> ask rue about that sine thing
[00:10:25] -!-
Dave911 has quit [Ping timeout: 260 seconds]
[00:13:35] -!-
elmo40 [elmo40!~Elmo40@CPE0017ee09ce6d-CM001bd7a89c28.cpe.net.cable.rogers.com] has joined #emc
[00:17:05] -!-
ve7it has quit [Remote host closed the connection]
[00:27:43] -!-
theos has quit [Ping timeout: 240 seconds]
[00:37:25] -!-
frallzor has quit []
[00:42:38] -!-
sumpfralle1 [sumpfralle1!~lars@f054032162.adsl.alicedsl.de] has joined #emc
[00:44:19] -!-
Gensor [Gensor!Gensor@209.159.211.192] has joined #emc
[00:45:27] -!-
sumpfralle has quit [Ping timeout: 276 seconds]
[00:49:07] <KimK> Any "touchy" users around?
[00:49:11] -!-
ries has quit [Quit: ries]
[00:51:13] <KimK> I'll check back later.
[00:51:38] <IG-garage> no, can not touch you 'cause I'm far. What, doubt in your existence?
[00:51:57] <IG-garage> ;)
[01:19:08] -!-
Dave911 [Dave911!~chatzilla@184.18.125.172] has joined #emc
[01:30:23] <elmo40> IG-garage: how is the oil spill?
[01:40:41] -!-
skunkworks has quit [Remote host closed the connection]
[01:43:47] -!-
Dave911 has quit [Ping timeout: 240 seconds]
[01:44:57] <IG-garage> well, it's ok robably, but where is it?
[01:45:48] <elmo40> many all over the world...
[01:48:07] -!-
Calyp has quit [Quit: Leaving]
[01:49:08] <IG-garage> just have cleaned the gas tank this morning, and that formed sheet of metal yesterday.
[02:03:10] -!-
Valen [Valen!~Valen@2001:44b8:3199:9100:21e:8cff:fe63:55df] has joined #emc
[02:09:33] -!-
theos [theos!~theos@unaffiliated/theos] has joined #emc
[02:20:14] -!-
ries [ries!~ries@200.125.129.54] has joined #emc
[02:21:00] -!-
Tom_L [Tom_L!~Tl@unaffiliated/toml/x-013812] has joined #emc
[02:21:02] -!-
l0st1nsp4c3 [l0st1nsp4c3!~IceChat7@ppp-53-165.mtl.contact.net] has joined #emc
[02:25:10] -!-
jbunch has quit [Ping timeout: 252 seconds]
[02:29:18] <Tom_L> ok i got my probe dialed in so the last word indicator doesn't move at all
[02:29:32] <elmo40> :)
[02:30:50] <Tom_L> http://tom-itx.dyndns.org:81/~webpage/emc/probe_index.php
[02:30:59] <Tom_L> i added adjuster screws to the side
[02:31:21] <Tom_L> and i still need to get a tip for it
[02:32:34] <IG-garage> is it for 2.5D scanning of something?
[02:33:16] <elmo40> would be cool to make a CMM out of my machine
[02:40:01] <IG-garage> CMM = ? "Computer Mamma Mia" maybe?
[02:40:13] -!-
SadMan has quit [Ping timeout: 252 seconds]
[02:44:54] -!-
SadMan [SadMan!sadman@sadman.net] has joined #emc
[02:46:54] <cradek> Tom_L: what is the scale? are the dowels 1/8 and 3/8?
[02:48:47] <Tom_L> the dowels on the probe are 1.8
[02:48:49] <Tom_L> 1/8
[02:48:58] <Tom_L> the center dowel is 3/8
[02:49:55] <Tom_L> body is ~2" diameter and 1.75" long
[02:50:35] <Tom_L> found a fairly cheap source for probe tips
[02:50:59] <Tom_L> M3 tip thread 50mm long
[02:51:08] <Tom_L> ~$40 or so
[02:51:54] <Tom_L> goin back in where it's cool to solder up the ball contacts
[02:51:56] -!-
l0st1nsp4c3 has quit [Ping timeout: 252 seconds]
[02:52:05] -!-
Tom_L has quit []
[02:53:05] -!-
Dave911 [Dave911!~chatzilla@184.18.125.172] has joined #emc
[03:01:12] <Tom_itx> i'll add a couple more pics here shortly
[03:05:12] -!-
ssi has quit [Ping timeout: 250 seconds]
[03:05:57] -!-
ssi [ssi!~ssi@app2.prototechnical.com] has joined #emc
[03:08:06] <Tom_itx> ok
[03:08:34] <toastydeath> does anyone get a sick feeling to their stomach when they buy something pricy
[03:08:45] <Tom_itx> it passes
[03:08:45] <elmo40> nope
[03:08:46] <toastydeath> i just bought a used nikon d2x
[03:08:55] <toastydeath> and every time i buy something like that i am like "nausea"
[03:09:02] <Tom_itx> get a D300 then feel sick
[03:09:35] <Tom_itx> http://tom-itx.dyndns.org:81/~webpage/emc/probe_index.php
[03:09:49] <Tom_itx> added a couple pics showing the adjusters
[03:10:41] <Tom_itx> there's just enough 'wiggle' in the bolt holes on the bottom for adjustment
[03:30:56] -!-
syyl__ [syyl__!~syyl@p4FD1516C.dip.t-dialin.net] has joined #emc
[03:33:48] -!-
syyl_ has quit [Ping timeout: 250 seconds]
[03:35:10] -!-
jbunch [jbunch!~jim@76.9.248.8] has joined #emc
[03:37:07] <nicko> anhy 7i33 users here ?
[03:37:38] -!-
Tom_L [Tom_L!~Tl@unaffiliated/toml/x-013812] has joined #emc
[03:37:47] -!-
Tom_L has quit [Client Quit]
[03:49:53] -!-
sumpfralle1 has quit [Ping timeout: 252 seconds]
[03:53:21] -!-
Tom_L [Tom_L!~Tl@unaffiliated/toml/x-013812] has joined #emc
[03:57:10] <pcw_home> I can answer 7I33 questions
[04:00:20] <Tom_L> when you don't have a rotary head, you improvise:
http://tom-itx.dyndns.org:81/~webpage/emc/jig2.jpg
[04:00:33] <Tom_L> i use that to drill my 3 dowelpin holes for the probe
[04:12:05] <nicko> PCW
[04:12:08] <nicko> hello
[04:12:25] <nicko> OK, trying to get my drive enable logic sorted out here
[04:13:13] <nicko> I set up a desktop supply with 5v and *finally* found a set up that worked - apply 5V.. drive enabled - take it away, drive disables... perfect
[04:13:34] <nicko> so I connected a 7i33 ENA to it
[04:13:38] <nicko> it worked!
[04:13:44] <nicko> about three toggles
[04:14:04] <nicko> then it just sits disabled (as if 7i33 were low)
[04:14:24] -!-
vladimirek [vladimirek!~vladimire@bband-dyn106.178-40-170.t-com.sk] has joined #emc
[04:15:07] <nicko> its intermittent - one thing for sure is that as my drives aren't tuned yet as soon as I get a ferror from EMC the enable will go low - and its usually from there that I can longer enable the drive without power cycling it
[04:15:28] <nicko> longer = "no longer"
[04:16:46] <pcw_home> The 7I33 enables are not high current outputs. I would use s 7I37 output for drive enable
[04:17:15] <nicko> The drives need 6.3mA to go high
[04:17:20] <nicko> is that too high ?
[04:17:54] <pcw_home> 6.3MA requires how many volts?
[04:18:12] <nicko> hmmm - well the range is 3.3 to 5.5v
[04:19:35] <nicko> so its either an enable from the 7i33 or I use a pin on the 5i22 as enable ?
[04:19:49] <nicko> Are they more suited ?
[04:20:44] <pcw_home> Only for active low (and drive opto anode returned to 3.3V)
[04:21:21] <pcw_home> Like I said I would use a 7I37 output for this
[04:22:13] <pcw_home> the bare FPGA pins are capable of 24 MA source or sink but one mistake and you have fried an expensive FPGA card
[04:23:23] -!-
Tom_L has quit []
[04:23:52] <nicko> I can invert the logic at the drive - I'd like to give it a try...
[04:24:44] <nicko> but the open collector - pull up/pull down and so on is getting me all confused
[04:28:16] <pcw_home> The 7I33 enable outputs are just HCMOS and have a (I think) 300 Ohm series resistor so they wont drive much
[04:28:18] <pcw_home> ( we had to add the resistor as too many people blew up the gates otherwise)
[04:30:13] <nicko> the costs of this machine are sky rocketing (as expected but not accounted for >rolleyes< )
[04:31:02] <Tom_itx> pcw_home, 24ma source or sinc but what about overall current on the chip?
[04:31:51] <pcw_home> On a 5I20 probably and amp or so
[04:32:16] <Tom_itx> on the fpga itself? that seems like alot
[04:33:38] <pcw_home> Lots of power pins
[04:35:11] <pcw_home> imagine 12 74ACT245 buffers
[04:35:59] <nicko> so I've been connecting my 5i22 all over the show - havent blown it yet
[04:36:32] -!-
ries has quit [Quit: ries]
[04:36:41] <nicko> I have been cautious - but then a mistake and no consequences = not being so worried
[04:38:13] <pcw_home> no, we're really rough with our test systems and i've never fried one, but customers have (shorting all the outputs at once or connecting an pin to 12V)
[04:39:16] <nicko> aint no 12v around here ! except that 12v over there - and that 12v over there
[04:39:21] <nicko> and the 24
[04:39:29] <nicko> and the desktop on random setting
[04:39:37] <nicko> oh, and the 160v ...
[04:39:55] <nicko> which I've seen hit GND
[04:40:01] <nicko> quite impressive
[04:40:27] <pcw_home> those will definitely cause fryola
[04:41:08] <nicko> more noise than heat
[04:41:35] <nicko> hey, so - yes, ok considering the 7i37 for future projects - but for now ...
[04:42:10] <nicko> ok, so I have a 5i22 - I can choose is_output and is_opendrain
[04:42:19] <nicko> I can also change jumpers around on the board
[04:42:26] <pcw_home> Yeah we blew up one of our 8I20s when testing , 6400 uF @340VDC -- big bang
[04:42:31] <nicko> I can invert logic at both ends
[04:42:51] <nicko> I can also wire it up physically an infinite number of ways
[04:42:55] <pcw_home> Dont change any jumpers, no need for standard stuff
[04:43:10] <nicko> I dont have the knowledge to sort out which of all these combinations I need
[04:43:30] <nicko> I just know that 5v will switch the thing on and off
[04:43:42] <nicko> (the manual says 3.3v will also do it)
[04:43:59] <nicko> can you provide a 'how to connect the dang thing for dummies' ??
[04:44:18] <pcw_home> Well if 3.3 will do then leave it active high and drive it from a 5I22 output
[04:44:39] <nicko> ok! I'll give it a crack ;)
[04:48:56] <nicko> ok
[04:49:06] <nicko> so its toggling 3.3v unconnected
[04:49:53] <nicko> when I connect it it doesn't enable the drive - but it toggles at around 1.5v
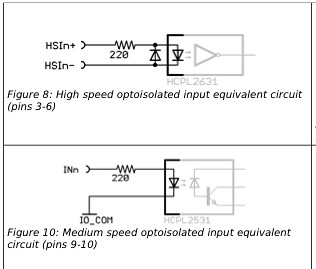
[04:50:12] <nicko> the equivalent circuit is
http://farm7.static.flickr.com/6022/5992335223_fdf3a532e4.jpg
[04:50:15] <nicko> the top one
[04:58:46] <pcw_home> so HSIN- is grounded to the 5I22 ground and HSIN+ connect to a 5I22 output pin?
[04:59:58] <nicko> yes
[05:01:15] <nicko> I tried IO_COM (pin2) to 5i22 GND also
[05:02:42] <pcw_home> is this just one input?
[05:03:08] <nicko> um, not sure what you mean ...
[05:03:12] <nicko> yes ?
[05:03:46] <pcw_home> You dont have open drain set do you?
[05:04:03] <nicko> I have that set on another pin
[05:04:09] <nicko> but I'll check to be sure
[05:07:02] <nicko> oh dear!!!
[05:07:04] <nicko> It was
[05:07:17] <nicko> ok - now I'm gettign following errors immediately !
[05:07:22] <nicko> which is GOOD right ?
[05:07:41] <nicko> hmmm, I might invert the motor direction
[05:07:44] <pcw_home> 1.5V means ~.5v across the 220 resistor = ~2mA so something is really wrong (or you have open drain enabled)
[05:07:46] <pcw_home> Yeah its expected
[05:08:12] <pcw_home> anyway 'night all
[05:08:18] <pcw_home> bbl
[05:08:30] <nicko> THANKS M U C H
[05:09:18] <nicko> I pulled the encoders out and yeh - it enables and drives
[05:09:21] <nicko> !
[05:25:32] -!-
ve7it [ve7it!~LawrenceG@S0106009027972e37.pk.shawcable.net] has joined #emc
[05:39:17] -!-
IG-garage [IG-garage!~ig@unaffiliated/mazafaka] has parted #emc
[05:48:18] -!-
FinboySlick has quit [Quit: Leaving.]
[06:04:45] <nicko> hello all
[06:05:04] <nicko> so I might be actually at the point where I have to tune/figure out my motors
[06:05:15] <nicko> anyone got any tips ?
[06:07:16] -!-
Athlocatle [Athlocatle!~vip0@83.172.27.197] has joined #emc
[06:24:38] -!-
capricorn_one has quit [Remote host closed the connection]
[06:34:12] -!-
ve7it has quit [Remote host closed the connection]
[06:41:36] -!-
toastydeath has quit [Read error: Connection reset by peer]
[06:43:54] -!-
toastydeath [toastydeath!~toast@c-69-140-223-139.hsd1.md.comcast.net] has joined #emc
[07:03:06] -!-
i_tarzan [i_tarzan!~i_tarzan@187.152.56.129] has joined #emc
[07:15:00] <Valen> check your scale is right and in the right direction
[07:15:08] <Valen> start off with P low
[07:15:19] <Valen> and make ferror and min ferror like eleventy billion
[07:15:35] <Valen> nicko:
[07:15:53] <Valen> then wind up P untill it starts to oscilate
[07:16:03] <Valen> then back P off a little and add some D
[07:16:09] <Valen> should be smooth then
[07:16:34] <Valen> then add some ff1 and ff2 to make it cruise at as close to 0 ferror as you can
[07:16:49] <Valen> then add a fair bit of I to take up whats left
[07:33:53] -!-
WalterN [WalterN!~walter@tiwake.com] has joined #emc
[07:44:32] -!-
acemi [acemi!~acemi@unaffiliated/acemi] has joined #emc
[07:50:15] -!-
robh__ [robh__!~robert@5ace7001.bb.sky.com] has joined #emc
[07:52:21] -!-
Ze1982 has quit [Quit: Leaving]
[07:54:11] -!-
ries [ries!~ries@200.125.129.54] has joined #emc
[07:57:52] -!-
Ze1982 [Ze1982!~Ze1982@ppp255-131.static.internode.on.net] has joined #emc
[08:28:18] -!-
ries has quit [Quit: ries]
[08:36:49] nowox_ is now known as
nowox
[08:37:34] -!-
Calyp [Calyp!~Caly@unaffiliated/calyptratus-tzm] has joined #emc
[08:58:39] <nicko> oh hey Valen - sorry, it was dinner !
[08:59:20] <nicko> I'm getting odd results - I was going to do what you suggested
[08:59:39] <nicko> (sans the feedforward - but I'll read up on it)
[08:59:55] <nicko> but output scale 1 or -1 doesn't give me motion
[09:26:23] <awallin> nicko: what are you trying to do? what motors/drives etc?
[09:49:57] <nicko> hello...
[09:50:28] <nicko> I'm trying to get some servo drives working with EMC
[09:50:40] <nicko> Granite devices VSD-E
[09:51:04] <nicko> I suspect the issue is with the drives at the moment
[09:51:20] <nicko> for whatever reason they aren't accepting analog commands
[09:51:38] <nicko> its all a bit intermittent and sketchy ....
[09:52:01] <nicko> which makes fault proving really tiresome - but I think its out of EMC for now
[10:35:55] <anonimasu> morning
[10:50:06] -!-
sumpfralle [sumpfralle!~lars@f054032162.adsl.alicedsl.de] has joined #emc
[11:04:41] -!-
tlab [tlab!~tlab@c-98-223-20-100.hsd1.in.comcast.net] has joined #emc
[11:24:19] -!-
theos has quit [Read error: Connection reset by peer]
[11:34:15] -!-
cncbasher has quit [Remote host closed the connection]
[11:45:41] -!-
Loetmichel has quit [Ping timeout: 240 seconds]
[11:49:18] -!-
Loetmichel [Loetmichel!Cylly@p54B14C39.dip.t-dialin.net] has joined #emc
[11:57:49] -!-
theos [theos!~theos@unaffiliated/theos] has joined #emc
[12:32:25] -!-
sumpfralle has quit [Ping timeout: 260 seconds]
[12:41:48] * anonimasu reads about pid tuning methods
[12:42:16] <anonimasu> I think making a auto pid tuner, using cohen-coon wouldnt be too heavy.
[12:43:15] -!-
emc2-buildmaster has quit [Ping timeout: 255 seconds]
[12:44:43] -!-
sumpfralle [sumpfralle!~lars@31.16.112.145] has joined #emc
[12:48:47] -!-
syyl [syyl!~sg@p4FD1516C.dip.t-dialin.net] has joined #emc
[13:12:54] -!-
WalterN has quit [Read error: Connection reset by peer]
[13:14:50] <Tom_itx> anonimasu, sleep much?
[13:16:59] <anonimasu> Tom_itx: alot :)
[13:17:48] <anonimasu> also tested the motor with some pid tuning and that made them mover smoother
[13:18:05] <anonimasu> tho, I beleive that I need more encoder counts to make them not jitter so much
[13:18:06] <Tom_itx> good stuff
[13:18:16] <Tom_itx> probably so
[13:18:39] <anonimasu> they are jittering 0.002mm or something if I set scale up properly
[13:18:56] <Tom_itx> does backing off P and adding I help that any?
[13:19:02] <anonimasu> no
[13:19:13] <anonimasu> it still jumps about 2 encoder counts :D
[13:19:18] <Tom_itx> did you take P up to the 'jumpy' stage?
[13:19:22] <Tom_itx> then back off a bit
[13:19:22] <anonimasu> yeah
[13:19:24] <Tom_itx> ok
[13:19:32] <anonimasu> then added a bit of d to make it smooth
[13:19:36] -!-
sumpfralle has quit [Ping timeout: 246 seconds]
[13:19:36] <Tom_itx> yeah
[13:19:40] <anonimasu> then a micro bit of i.
[13:19:47] <Tom_itx> cooling down here after mowing
[13:19:52] <anonimasu> same here
[13:19:58] <anonimasu> however I beleive that the loop resolution is too low to properly handle pid
[13:20:00] <Tom_itx> wanted to get it done before the sun came up
[13:20:24] <anonimasu> that's my guess
[13:20:25] <Tom_itx> it could be
[13:20:32] <Tom_itx> how do you fix that?
[13:20:39] <anonimasu> dspic as interpolator
[13:20:41] <Tom_itx> can you shorted the servo loop?
[13:20:50] <Tom_itx> or is that where you do it..
[13:20:56] <anonimasu> yeah it is
[13:21:04] <anonimasu> it's a matter of not having enough encoder counts
[13:21:12] <Tom_itx> making it shorter would give you fewer samples though
[13:21:26] <anonimasu> well, I need more samples in a faster period
[13:21:31] <anonimasu> ie, more quadrature pulses per turn
[13:21:40] <Tom_itx> and you don't have quad right now?
[13:21:53] <anonimasu> only 1x interpolation of the sin/cos
[13:22:00] <anonimasu> so I have 4096 counts/rev
[13:22:11] <Tom_itx> that should be plenty
[13:22:25] <anonimasu> and with my setui that turns out as 819 counts/mm
[13:22:35] <anonimasu> so it jitters about 3 encoder counts
[13:22:52] <Tom_itx> maybe it's missing counts
[13:22:53] <anonimasu> that's actually not too bad..
[13:22:55] <Tom_itx> or rolling over
[13:22:57] <anonimasu> no it isnt
[13:23:06] <Tom_itx> still using the avr?
[13:23:09] <anonimasu> then commutation would be screwed and my motor would jump :)
[13:23:12] <anonimasu> yeah
[13:23:58] <anonimasu> if I set up for gearing 2:1 it'd get better.
[13:24:16] <Tom_itx> are you gonna use belt drive on it?
[13:24:22] <anonimasu> yeah
[13:24:39] <anonimasu> for now normal at3 belts, if I need backslash free such
[13:25:37] <anonimasu> i'll deal with that later
[13:25:56] <anonimasu> same setup just new gears and belts
[13:26:09] <anonimasu> possibly if they make them with taper lock that'd be even better
[13:26:15] -!-
vezza [vezza!~andrea__@host254-45-dynamic.16-87-r.retail.telecomitalia.it] has joined #emc
[13:27:11] -!-
Birdman3131 has quit [Ping timeout: 240 seconds]
[13:27:12] <Tom_itx> from sdp?
[13:27:30] <anonimasu> no from a local firm in sweden
[13:28:33] -!-
Birdman3131 [Birdman3131!~quassel@ip70-178-238-227.ks.ks.cox.net] has joined #emc
[13:29:39] <anonimasu> maybe i'll have more gearing for the x axis
[13:30:21] <anonimasu> 5m/min is more then enough for that
[13:31:14] <anonimasu> 125mm/s with 2:1 gearing
[13:31:25] <anonimasu> that will give me about 1 second edge to edge of the carriage
[13:31:26] <Tom_itx> http://tom-itx.dyndns.org:81/~webpage/motors/motor3.jpg
[13:31:33] <Tom_itx> i considered putting those on my sherline
[13:31:45] <anonimasu> arent they small?
[13:31:48] <Tom_itx> they have 1024 encoders i can put on the back
[13:31:56] <Tom_itx> 1/4" shaft
[13:32:01] <anonimasu> (i cant tell how big they actually are)
[13:32:04] <Tom_itx> i know
[13:32:31] <Tom_itx> you can see the screw mounts on the back where i took off the heds encoders
[13:32:37] <anonimasu> you know, you could always stick encoders onto the steppers
[13:32:39] <Tom_itx> for my bot
[13:32:43] <Tom_itx> meh
[13:32:46] <anonimasu> so you could have closed loop anyway
[13:33:01] <anonimasu> (on the screws)
[13:33:03] <Tom_itx> it wouldn't improve anything that much
[13:33:09] <anonimasu> how are the torque specs?
[13:33:14] <anonimasu> are they about the same as for your steppers?
[13:33:15] <Tom_itx> on what?
[13:33:18] <Tom_itx> i dunno
[13:33:26] <Tom_itx> they're off copy machines
[13:33:53] -!-
cncbasher [cncbasher!~david@cpc15-hart9-2-0-cust101.11-3.cable.virginmedia.com] has joined #emc
[13:34:26] <anonimasu> figure out if they have enough torque first :)
[13:34:41] <Tom_itx> i'm pretty sure they would, especially if i geared them
[13:35:53] * anonimasu nods
[13:36:04] <anonimasu> it's worth it, specially since you have all hardware you need already
[13:36:11] <Tom_itx> no drivers
[13:36:18] <anonimasu> you just need the drive stage for the motors but you can build a h-bridge driver
[13:36:43] <Tom_itx> i have a couple 3A hbridges but i'm not sure that's enough
[13:37:09] <anonimasu> probably not, but you have electronics skills enough to make your own :)
[13:37:31] <anonimasu> pwmgen supports that i think
[13:37:40] <anonimasu> http://linuxcnc.org/docs/html/man/man9/pwmgen.9.html
[13:37:48] <Tom_itx> probably
[13:37:56] <anonimasu> type 2: up/down
[13:37:57] <anonimasu> Two output pins, up and down. For positive inputs, the PWM/PDM waveform appears on up, while down is low. For negative inputs, the waveform appears on down, while up is low. Suitable for driving the two sides of an H-bridge to generate a bipolar output.
[13:37:58] <Tom_itx> it's a pretty basic drive setup
[13:38:31] <Tom_itx> it'll be a while if i do
[13:38:46] <anonimasu> i'd rather make chips then much around :D
[13:38:52] <anonimasu> atleast for a while
[13:41:35] <Tom_itx> me too
[13:42:25] <Tom_itx> I got the z axis working alot better than it was, next i'll go thru the x and y and try to get them as good as they can be
[13:42:33] <Tom_itx> and just use it a while
[13:42:58] <anonimasu> indeed
[13:43:11] <Tom_itx> it'll be a while before i could get another mill but that's what it would take to do much of anything bigger
[13:43:25] <anonimasu> im craving to start on the mill soon, since going to work to make stuff is a pain in the ass
[13:43:55] <Tom_itx> you won't have time once she moves in :)
[13:44:14] <anonimasu> hehe, she's understanding with that ^_^
[13:44:22] <Tom_itx> for now
[13:48:47] -!-
Birdman3131 has quit [Read error: Connection reset by peer]
[13:50:07] -!-
Birdman3131 [Birdman3131!~quassel@ip70-178-238-227.ks.ks.cox.net] has joined #emc
[13:51:28] -!-
vezza has quit [Quit: Sto andando via]
[14:10:34] -!-
Birdman3131 has quit [Read error: Connection reset by peer]
[14:11:52] -!-
Birdman3131 [Birdman3131!~quassel@ip70-178-238-227.ks.ks.cox.net] has joined #emc
[14:14:04] <elmo40> watch out anonimasu, women tend to leach their way into the 'wearing the pants' of the relationship ;)
[14:14:08] -!-
elmo40 has quit [Quit: Leaving.]
[14:16:34] -!-
isssy [isssy!~isssy@78-83-51-185.spectrumnet.bg] has joined #emc
[14:30:35] -!-
acemi has quit [Quit: WeeChat 0.3.2]
[14:30:40] -!-
isssy has quit [Quit: Visitor from www.linuxcnc.org]
[14:36:49] -!-
ries [ries!~ries@200.125.129.54] has joined #emc
[15:05:55] -!-
Tech_Talk [Tech_Talk!~quassel@ip70-178-238-227.ks.ks.cox.net] has joined #emc
[15:08:34] -!-
theos has quit [Ping timeout: 264 seconds]
[15:08:36] -!-
Birdman3131 has quit [Ping timeout: 255 seconds]
[15:08:56] -!-
theos [theos!~theos@unaffiliated/theos] has joined #emc
[15:15:30] -!-
El_Matarife has quit [Quit: Nettalk6 - www.ntalk.de]
[15:25:38] Tech_Talk is now known as
Birdman3131
[15:33:19] -!-
theos has quit [Disconnected by services]
[15:41:05] -!-
theos [theos!~theos@unaffiliated/theos] has joined #emc
[15:43:39] -!-
capricorn_one [capricorn_one!~capricorn@zima.linwin.com] has joined #emc
[15:47:39] -!-
Valen has quit [Quit: Leaving.]
[15:49:33] -!-
theos has quit [Ping timeout: 255 seconds]
[15:58:05] * alex_joni looks at Huddle and thinks google reinvents IRC :/
[16:00:16] <Tom_itx> link to useful subroutines? i think someone posted it here a while back
[16:02:00] -!-
theos [theos!~theos@unaffiliated/theos] has joined #emc
[16:03:49] -!-
syyl has quit [Quit: Verlassend]
[16:04:09] -!-
Tech_Talk [Tech_Talk!~quassel@ip70-178-238-227.ks.ks.cox.net] has joined #emc
[16:04:33] <alex_joni> http://git.linuxcnc.org/gitweb?p=emc2.git;a=blob;f=nc_files/useful-subroutines.ngc;h=7aa1903704f2872ae6c295d5fea0f15e52ef92ce;hb=HEAD
[16:04:47] <alex_joni> Tom_itx: should be included with your emc2 install
[16:04:53] <Tom_itx> oh
[16:05:09] <Tom_itx> i'm looking for touch probe routines specifically
[16:05:22] <Tom_itx> and tool touch
[16:06:04] <Tom_itx> i've never used G38
[16:06:39] -!-
Birdman3131 has quit [Ping timeout: 255 seconds]
[16:08:03] -!-
Ze1982 has quit [Quit: Leaving]
[16:08:52] <alex_joni> there's probe-hole.ngc and gridprobe.ngc
[16:09:10] <Tom_itx> i'll look em over
[16:09:33] <alex_joni> also smartprobe.ngc
[16:09:48] <Tom_itx> you run those before running you main program to set work coordinates?
[16:10:03] <Tom_itx> that's basically what i'm after
[16:10:25] <Tom_itx> and i suppose you can enter a compensation value for the tip diameter
[16:11:21] <alex_joni> probably, but you'll discover that from the files ;)
[16:11:43] <Tom_itx> i'm sure
[16:16:18] -!-
kljsdfhklj has quit [Quit: kljsdfhklj]
[16:16:54] <Tom_itx> smartprobe looks quite similar to gridprobe
[16:18:07] <Sairon> is this thing on?
[16:18:09] <Sairon> heh
[16:18:29] -!-
nullie has quit [Read error: Connection reset by peer]
[16:18:48] -!-
nullie [nullie!~nullie@nullie.telenet.ru] has joined #emc
[16:19:39] -!-
kljsdfhklj [kljsdfhklj!~ln@189.31.112.161] has joined #emc
[16:20:12] <Tom_itx> does G38.x back off the workpiece once it's touched or do you need to add a move for that?
[16:26:45] -!-
kljsdfhklj has quit [Quit: kljsdfhklj]
[16:28:59] -!-
kljsdfhklj [kljsdfhklj!~ln@189.31.112.161] has joined #emc
[16:29:02] <anonimasu> no luck.
[16:29:03] <anonimasu> :/
[16:30:24] <anonimasu> pcw_home: there?
[16:58:50] -!-
IchGuckLive [IchGuckLive!~chatzilla@95-89-104-26-dynip.superkabel.de] has joined #emc
[16:59:06] <IchGuckLive> Guten Abend
[17:14:05] -!-
mrsunshine has quit [Read error: Connection reset by peer]
[17:23:54] -!-
l0st1nsp4c3 [l0st1nsp4c3!~IceChat7@ppp-53-165.mtl.contact.net] has joined #emc
[17:30:43] <Tom_itx> link to any good tool touch pads?
[17:31:13] -!-
Tom_L [Tom_L!~Tl@unaffiliated/toml/x-013812] has joined #emc
[17:31:49] -!-
Birdman3131 [Birdman3131!~quassel@ip70-178-238-227.ks.ks.cox.net] has joined #emc
[17:32:47] -!-
mrsunshine [mrsunshine!~mrsunshin@c-0a3de253.4551536--62697410.cust.bredbandsbolaget.se] has joined #emc
[17:34:24] <IchGuckLive> Tom_itx: what size
[17:34:40] <Tom_itx> i'm just looking for good design ideas
[17:34:46] -!-
Tech_Talk has quit [Ping timeout: 257 seconds]
[17:34:48] <Tom_itx> small i suppose
[17:35:09] <Tom_itx> i'm going for .5 to 1" height
[17:37:10] -!-
FinboySlick [FinboySlick!~shark@74.117.40.9] has joined #emc
[17:40:43] <IchGuckLive> mechanic or optic
[17:40:58] <Tom_itx> probably a switch
[17:41:23] <Tom_itx> optic is an option i suppose
[17:41:54] <IchGuckLive> so best is a plate with 4 pins H7/F8 this is pressing the switch down
[17:43:00] <IchGuckLive> minimal spring way about 5mm
[17:43:48] <IchGuckLive> at 1" by 1" it shoudt give you a good precision
[17:47:24] <Tom_L> http://tool-eye.com/index.html
[17:52:23] <IchGuckLive> Tom_L: this needs alot of power 24V 2Amp
[17:53:08] <IchGuckLive> and is not for milling
[17:54:25] -!-
l0st1nsp4c3 has quit [Ping timeout: 260 seconds]
[17:54:48] -!-
ve7it [ve7it!~LawrenceG@S0106009027972e37.pk.shawcable.net] has joined #emc
[17:54:52] -!-
IchGuckLive [IchGuckLive!~chatzilla@95-89-104-26-dynip.superkabel.de] has parted #emc
[17:55:56] <anonimasu> Tom_L: why not make the same as that and have a optical sensor centered in the housing
[17:56:04] <anonimasu> so you can use one sensor to trigger from 4 directions
[17:57:09] <Tom_L> http://www.youtube.com/watch?v=8xWrT12NY_g
[17:57:16] <Tom_L> that one is kinda interesting
[18:03:10] <Tom_L> renishaw i think
[18:04:06] -!-
mhaberler [mhaberler!~mhaberler@macbook.stiwoll.mah.priv.at] has joined #emc
[18:05:15] -!-
ries has quit [Quit: ries]
[18:06:23] -!-
l0st1nsp4c3 [l0st1nsp4c3!~IceChat7@ppp-53-165.mtl.contact.net] has joined #emc
[18:08:48] -!-
ries [ries!~ries@200.125.129.54] has joined #emc
[18:18:03] <anonimasu> Tom_L: it moves!
[18:18:04] <anonimasu> :)
[18:18:18] <Tom_L> :)
[18:18:27] <anonimasu> im spinning at 1krpm now :)
[18:18:29] <anonimasu> smootly
[18:18:38] <Tom_L> what did you do?
[18:18:51] <anonimasu> wired the encoders up to the diff input of the mesa board
[18:19:47] <Tom_L> which mesa board?
[18:19:56] <Tom_L> you got 3 there iirc
[18:19:59] <anonimasu> the motion oriendted rs422 one
[18:20:40] -!-
l0st1nsp4c3 has quit [Ping timeout: 260 seconds]
[18:21:25] <Tom_L> 47?
[18:21:48] <Tom_L> good stuff
[18:21:49] <anonimasu> yeah
[18:22:01] <anonimasu> then changing of scale in the ini to make pid work
[18:23:07] <Tom_L> those are supposed to be digital in aren't they?
[18:23:38] <anonimasu> yeah, but since they are differential I can plug the diff sin/cos into them
[18:23:39] <anonimasu> :)
[18:23:55] <anonimasu> and it does the same as the comparator would
[18:24:05] <Tom_L> the levels are off though aren't they?
[18:24:14] -!-
isssy [isssy!~isssy@78-83-51-185.spectrumnet.bg] has joined #emc
[18:24:15] <anonimasu> well, it works :)
[18:24:29] <Tom_L> it might work better with the right interface
[18:24:50] <anonimasu> they are smooth, and they dont jitter at all now
[18:24:54] <anonimasu> :)
[18:25:00] <Tom_L> ramp it up a bit
[18:25:15] <anonimasu> my PID is off still tho, but my computer is a bit slow for the scope
[18:25:24] <anonimasu> we'll see im going to order a d510mo next week
[18:25:39] <pcw_home> No its differential only disadvantage is it has 200 mV hysteresis but since the sine/cos are 1V diff its OK
[18:25:56] <anonimasu> Tom_L: and it counts 10mhz :]
[18:26:25] <Tom_L> pcw, would that new board you're working on be a better solution for that?
[18:26:34] <anonimasu> Tom_L: im settling for gearing down 2:1 to get more resolution for now, and the conversion stuff for interpolating them
[18:26:46] <pcw_home> Yea a 26ls32 is a cheap and fast comparator
[18:26:51] <anonimasu> for later when I really need it bad..
[18:27:02] <pcw_home> just not very sensitive
[18:27:23] <Tom_L> what board has that part?
[18:27:30] <Tom_L> the 47 or the new one?
[18:28:17] <pcw_home> almost all our 422 boards, but some do not allow you to disable the termination (7I47 does)
[18:29:02] <anonimasu> I were talking to tom about the board you are developing with the analog inputs you read as digital(for this stuff)
[18:29:16] <anonimasu> if that would be usable for interpolating the encoders on the fpga instead
[18:31:32] <pcw_home> We dont have anything really suitable for interpolation
[18:31:34] <pcw_home> but keep wanting to make a cheap interpolator for Heidehaine linear scales
[18:31:36] <pcw_home> (maybe 11 uA and 1V FS inputs)
[18:31:37] <pcw_home>
[18:32:40] <alex4nder> hey
[18:33:13] <Tom_L> if the encoders were open collector would i need pullups to hook them to the 7i47?
[18:33:47] <Tom_L> i think the HEDS ones are
[18:35:14] <pcw_home> But its tricky for encoders like yours
[18:35:16] <pcw_home> At 3000 RPM you have 50 KHz sine/cos or 200 KHz quadrature,
[18:35:18] <pcw_home> 16X interp would be 3.2MHz quadrature, pretty tough unless you have a very fast A-D and fast proc
[18:35:42] <pcw_home> For open collector yes you would need pullups
[18:36:38] <Tom_L> i can put 2 of the 7i47's off the 7i43 right?
[18:38:50] -!-
vladimirek has quit [Remote host closed the connection]
[18:41:33] -!-
vladimirek [vladimirek!~vladimire@bband-dyn106.178-40-170.t-com.sk] has joined #emc
[18:41:47] -!-
emcrules_mill has quit [Ping timeout: 240 seconds]
[18:41:50] -!-
FinboySlick has quit [Quit: Leaving.]
[18:42:15] <nicko> am I reading this right >> you're putting a sin/cos encoder stream into a digital input that bascially works as a comparator - and its mostly fine being read as quadrature ?
[18:42:34] <Tom_L> yes
[18:42:37] <nicko> cool
[18:42:51] -!-
emcrules_mill [emcrules_mill!~jp1@CPE0022b0b54c58-CM001bd71cb794.cpe.net.cable.rogers.com] has joined #emc
[18:43:04] <nicko> and you're discussing phasing when you mention hysterisis ?
[18:43:06] <Tom_L> the 7i47 is rs422 differential input
[18:43:39] <Tom_L> lag
[18:44:04] <nicko> like the 7i33 ... I have a sin/cos encoder here on one motor that I thought, ah well not an EMC candidate
[18:44:47] <nicko> it could only work in step/dir via its own drive ...
[18:45:04] <nicko> I'll store this little bit of info for later when I need it ;)
[18:45:06] <nicko> cheers!
[18:45:27] <Tom_L> if in doubt ask pcw_home :D
[18:47:28] <anonimasu> tomorrow's project.
[18:47:37] <anonimasu> make them get me connectors for the second motor.
[18:47:38] <anonimasu> :]
[18:48:10] <Tom_L> where you gettin connectors from?
[18:48:56] <anonimasu> allen bradley
[18:49:02] <anonimasu> some local reseller
[18:49:18] <Tom_L> at least you don't have to wait 6 weeks for em
[18:49:22] <anonimasu> they are special so I cant just buy them from another source
[18:49:27] <anonimasu> no I just waited for 5 weeks
[18:49:28] <anonimasu> :)
[18:49:52] <anonimasu> once the lathe is running im going to copy them.
[18:50:03] <anonimasu> 100eur for 2 connectors.. -_-
[18:50:32] <Tom_L> you can't find em at one of the suppliers?
[18:50:42] <anonimasu> no
[18:50:44] <anonimasu> they are special
[18:51:09] <Tom_L> well,
[18:51:19] <Tom_L> if you get tired of messin with em, i'll still take 4
[18:51:23] <anonimasu> haha :D
[18:51:30] <anonimasu> they are more expensive today now that they actually spin
[18:53:47] <anonimasu> nicko: does it have rs485 also?
[18:53:56] -!-
vladimirek has quit [Remote host closed the connection]
[18:54:03] <anonimasu> nicko: if it's a stegman srm I have a comp that handles the absolute value to emc :)
[18:54:06] <anonimasu> srm/srs
[18:54:19] <anonimasu> nicko: this is a allen bradley motor
[18:55:40] <Tom_L> http://cgi.ebay.com/Allen-Bradley-AC-Servo-Motor-Catalog-MPL-A320P-H-X107-/140583580854?pt=LH_DefaultDomain_0&hash=item20bb6f34b6
[18:55:44] <Tom_L> is that the same one?
[18:55:57] <anonimasu> no
[18:55:59] <anonimasu> mpl-b420
[18:56:34] <anonimasu> http://cgi.ebay.com/MPL-B420P-HK22AA-Allen-Bradley-servo-motor-New-/350475755252?pt=LH_DefaultDomain_0&hash=item5199fb9ef4
[18:56:37] <anonimasu> but mk22aa
[18:56:49] <Tom_L> http://cgi.ebay.com/Allen-Bradley-Servo-Motor-MPL-B430P-Nice-Item-/200633985744?pt=LH_DefaultDomain_0&hash=item2eb6b7aad0
[18:57:28] <anonimasu> yeah
[18:57:35] <anonimasu> same but with a higher rated speed
[18:57:46] <Tom_L> all 3 same type of interface?
[18:58:13] <anonimasu> yeah
[18:58:38] <Tom_L> what are you drivin em with?
[18:58:55] <anonimasu> a homebuilt 320V powersupply
[18:59:43] <anonimasu> the 430 is just a bit bigger
[19:01:01] <anonimasu> and alot more max torque
[19:01:07] <anonimasu> 19.8N/m
[19:01:08] <anonimasu> :)
[19:01:31] <anonimasu> and 2Nm more continous stall torque
[19:02:34] <Tom_L> does your motor run cooler now?
[19:02:41] <anonimasu> alot
[19:02:48] <Tom_L> what was causing it?
[19:02:51] <Tom_L> just the tuning?
[19:02:53] <anonimasu> yeah
[19:03:31] <Tom_L> where did you get the power supply?
[19:03:33] <anonimasu> I should wire up the temp switch inside
[19:03:43] <anonimasu> just bought it locally from where i buy electronics
[19:03:59] <anonimasu> in parts, rectifier and transformer
[19:04:11] <Tom_L> how big it the transformer?
[19:04:19] <Tom_L> you're on 220v right?
[19:04:22] <anonimasu> yeah
[19:04:29] <anonimasu> 220v and 6A
[19:04:30] <Tom_L> 50 hz?
[19:04:34] <anonimasu> yeah
[19:04:38] <anonimasu> it recified to 320V
[19:04:43] <anonimasu> recitfies
[19:04:59] <Tom_L> why not direct from the supply?
[19:05:01] <anonimasu> and a 1000�f 4??v cap
[19:05:12] <Tom_L> you need dc..
[19:05:25] <anonimasu> and I got i strongly adviced against that :)
[19:05:38] <Tom_L> it's not just an isolation transformer is it?
[19:05:42] <anonimasu> no
[19:05:58] <anonimasu> it has taps for lower voltages too
[19:06:04] <anonimasu> im running at 160v right now
[19:06:09] <anonimasu> dc
[19:06:28] <anonimasu> since it might be a bit less dangerous with wires all around the shop for testing
[19:13:33] -!-
Birdman3131 has quit [Ping timeout: 250 seconds]
[19:17:33] -!-
dvdm has quit [Ping timeout: 252 seconds]
[19:17:33] <nicko> Hello ...
[19:18:06] <nicko> I dont have the motor here with me - but yeh, it sounds similar
[19:18:14] <nicko> maybe a 330 - ...
[19:18:50] <nicko> It runs on a '010' ultra3000 drive
[19:19:00] <nicko> if that is any indication of its kW ...
[19:19:03] <anonimasu> kinetix 3000?
[19:19:27] <nicko> its black - with a metal rod coming out of it - ;)
[19:19:48] <anonimasu> well, if it says mpl-b on the nameplate something
[19:19:51] <anonimasu> you can use emc with it :)
[19:20:29] <nicko> I have two in the same body shape - one here is A320H -
[19:20:35] <nicko> HJ22AA
[19:20:41] -!-
sumpfralle [sumpfralle!~lars@e183155179.adsl.alicedsl.de] has joined #emc
[19:20:49] <nicko> but It could just be an incremental ...
[19:21:12] <anonimasu> mpl-a is 220v motors
[19:21:36] <nicko> yeh, I think it is as I have an A420P - HJ22AA that I know is incremental
[19:21:39] <nicko> yes 220
[19:21:54] <nicko> the sin/cos is currently running my lathe
[19:22:04] <nicko> the other motor caught fire the day I bought it
[19:22:06] <nicko> FUN!
[19:22:16] <nicko> well, the driving electronics did
[19:22:16] <anonimasu> h means 3500rpm
[19:22:31] <anonimasu> err no
[19:22:33] <anonimasu> hj22aa
[19:22:36] <nicko> max speed = 5000rpm on the data sticker
[19:22:47] <nicko> anyways - I got to head to uni ...
[19:22:49] <anonimasu> h means incremental 2000count encoder
[19:23:16] <nicko> oops - I thought it was 4000 - ah well, its spindle stuff anyway ;)
[19:23:18] <anonimasu> k means no shaft key/no shaft seal
[19:23:39] <anonimasu> 2 means circular connectors facing shaft
[19:23:43] <anonimasu> and 2 means no brake
[19:23:46] <nicko> I'm not making food so its ok
[19:23:48] <anonimasu> AA means standard non atex
[19:23:58] <anonimasu> and metric
[19:24:04] <nicko> brake woudl be nice for the future - ah well
[19:24:23] <nicko> yup, I tested it - it certainly runs in metric rpm
[19:24:26] <anonimasu> and that p in the numbers before a 2000rpm
[19:24:33] <nicko> do they mean spacing of the mounts ?
[19:24:41] <anonimasu> err 5000rpm i mean
[19:24:44] <anonimasu> yeah, iec metric mounts
[19:25:03] <anonimasu> is it mpl?
[19:25:12] <nicko> yeez
[19:25:16] <anonimasu> low inertia :)
[19:25:22] <anonimasu> very nice motor.
[19:25:33] <nicko> I have three of them ;)
[19:25:39] <anonimasu> i think if you ask pcw aobut it might might work with the same stuff im using
[19:25:57] <anonimasu> but without mesisng with encoders :D
[19:26:05] <anonimasu> yours will be easier to work with
[19:26:13] <nicko> the 2.2Kw one will become a spindle servo
[19:26:35] <nicko> tapping in alu and so on
[19:27:00] <nicko> 4.5Kw 32,000 rpm spindle (ATC) for the rest
[19:27:20] <nicko> ^hit I gotta jet
[19:27:40] <nicko> stop letting me talk about myself!
[19:31:50] <Tom_L> ebay sure has alot of those drives listed
[19:32:03] -!-
isssy has quit [Ping timeout: 258 seconds]
[19:39:46] <nicko> yep
[19:40:05] <nicko> I have a 010 and 020 type
[19:40:12] <nicko> need to get another 020
[19:40:31] <nicko> the indexing versions 3000'i' - are helpful, but cost a bit more
[19:40:35] -!-
acemi [acemi!~acemi@unaffiliated/acemi] has joined #emc
[19:41:27] <Tom_L> http://cgi.ebay.com/Allen-Bradley-Ultra-3000i-Servo-Drive-2098-DSD-020X-/130518798599?pt=LH_DefaultDomain_0&hash=item1e6386d107
[19:41:59] -!-
JT-Shop has quit [Read error: Connection reset by peer]
[19:42:11] <nicko> thats the type
[19:42:33] -!-
JT-Shop [JT-Shop!~chatzilla@216-41-156-49.semo.net] has joined #emc
[19:42:38] <nicko> they in the 2kw version though they have active cooling fans on the sinks - noisy!
[19:43:18] <nicko> the cables can be expensive - you have to wait around for the right auction
[19:43:46] <nicko> lots of people putting up these riduculously priced listing that sit for years - price fixing I guess
[19:45:04] -!-
Tom_L has quit []
[19:46:56] <anonimasu> nicko: 100eur for the connectors
[19:47:14] <anonimasu> and about the same for 6 meters of cable
[19:50:12] -!-
kljsdfhklj has quit [Quit: kljsdfhklj]
[19:54:15] <Spida> anonimasu: what kind of cable/connectors?
[19:57:15] <Tom_itx> AB connectors
[19:57:39] <Tom_itx> servo
[19:58:31] <anonimasu> Spida: the ones fot the mpl servos
[19:59:27] -!-
nullie has quit [Quit: Ex-Chat]
[20:00:09] <Spida> what kind of cable? 8 * 2.5mm^2?
[20:00:59] <anonimasu> yeah
[20:01:16] <anonimasu> err no
[20:01:18] <anonimasu> that's the encoder one
[20:01:23] <anonimasu> like 8 x 0.5
[20:01:32] <anonimasu> + 4x2.5mm^2
[20:04:06] -!-
ries has quit [Ping timeout: 252 seconds]
[20:04:47] -!-
ries [ries!~ries@200.125.129.54] has joined #emc
[20:10:37] * JT-Shop is glad to be home
[20:15:58] -!-
vezza [vezza!~andrea__@host254-45-dynamic.16-87-r.retail.telecomitalia.it] has joined #emc
[20:19:43] -!-
kljsdfhklj [kljsdfhklj!~ln@189.31.112.161] has joined #emc
[20:32:55] -!-
kljsdfhklj has quit [Quit: kljsdfhklj]
[20:37:18] -!-
kljsdfhklj [kljsdfhklj!~ln@189.31.112.161] has joined #emc
[20:38:38] -!-
maximilian_h [maximilian_h!~bonsai@ulmg-5d844ade.pool.mediaWays.net] has joined #emc
[20:39:12] -!-
L84Supper has quit [Read error: No route to host]
[20:39:23] -!-
mrsunshine has quit [Quit: Leaving]
[20:43:59] -!-
L84Supper [L84Supper!~ly@unaffiliated/l84supper] has joined #emc
[20:57:06] -!-
mrsunshine [mrsunshine!~mrsunshin@c-0a3de253.4551536--62697410.cust.bredbandsbolaget.se] has joined #emc
[20:57:58] -!-
danimal_garage has quit [Ping timeout: 246 seconds]
[20:58:29] -!-
danimal_garage [danimal_garage!~kvirc@ip68-111-138-74.sd.sd.cox.net] has joined #emc
[21:00:23] -!-
ve7it has quit [Remote host closed the connection]
[21:00:37] -!-
ve7it [ve7it!~LawrenceG@S0106009027972e37.pk.shawcable.net] has joined #emc
[21:08:21] -!-
Birdman3131 [Birdman3131!~quassel@ip70-178-238-227.ks.ks.cox.net] has joined #emc
[21:19:39] -!-
whampoo [whampoo!~whampoo@96-42-214-160.dhcp.roch.mn.charter.com] has joined #emc
[21:21:16] <whampoo> Hi all
[21:22:54] -!-
whampoo [whampoo!~whampoo@96-42-214-160.dhcp.roch.mn.charter.com] has parted #emc
[21:24:18] -!-
whampoo [whampoo!~whampoo@96-42-214-160.dhcp.roch.mn.charter.com] has joined #emc
[21:25:02] -!-
whampoo [whampoo!~whampoo@96-42-214-160.dhcp.roch.mn.charter.com] has parted #emc
[21:25:33] -!-
whampoo [whampoo!~whampoo@96-42-214-160.dhcp.roch.mn.charter.com] has joined #emc
[21:25:49] -!-
whampoo [whampoo!~whampoo@96-42-214-160.dhcp.roch.mn.charter.com] has parted #emc
[21:26:03] -!-
whampoo [whampoo!~whampoo@96-42-214-160.dhcp.roch.mn.charter.com] has joined #emc
[21:26:15] -!-
whampoo [whampoo!~whampoo@96-42-214-160.dhcp.roch.mn.charter.com] has parted #emc
[21:35:26] -!-
acemi has quit [Quit: WeeChat 0.3.2]
[21:52:15] <anonimasu> is there a practical limit as to how fast emc can move a 5 axis machine ;)
[21:53:26] <anonimasu> all the videos of machines I see are pretty slow :/
[21:54:10] -!-
Dave911 has quit [Ping timeout: 264 seconds]
[21:54:27] -!-
Fox_Muldr has quit [Ping timeout: 276 seconds]
[21:55:58] -!-
Fox_Muldr [Fox_Muldr!quakeman@frnk-4d01e3d3.pool.mediaWays.net] has joined #emc
[21:59:35] -!-
Dave911 [Dave911!~chatzilla@184.18.125.172] has joined #emc
[22:09:34] <toastydeath> anonimasu,
[22:10:04] <toastydeath> EMC cannot drive any axis machine in interpolation very quickly to any degree of accuracy, the actual error seems to vary on the machine rigidity and setup parameters
[22:10:38] <toastydeath> Linear movement can be done pretty quick but you have to exact stop at the end otherwise, from what I have seen, it mungles the corners
[22:10:42] -!-
Dave911 has quit [Ping timeout: 276 seconds]
[22:11:12] <toastydeath> if someone wrote a lookahead compiler I imagine EMC would rival most machine controls in terms of accuracy
[22:11:15] -!-
awallin has quit [Remote host closed the connection]
[22:11:24] <toastydeath> for five axis things
[22:12:32] <toastydeath> as far as I've seen EMC's lookahead is limited to one move
[22:14:33] <anonimasu> mhm..
[22:15:46] <anonimasu> in short, high speed loops at corners for precise stuff...
[22:17:18] <toastydeath> any sort of deviation
[22:17:38] <toastydeath> you can run all your motors at a high speed, but when that move comes to an end, you're going to have trouble
[22:21:33] <toastydeath> a 5 axis or higher contouring control essentially compiles the next couple hundred moves into acceleration values for the machine
[22:22:02] <toastydeath> so that when there's only a slight bend, it doesn't have to slow down much
[22:22:18] <toastydeath> but when there's a slight bend followed immediatly by a very sharp bend, it knows it has to slow down a lot to meet that second move
[22:22:29] <toastydeath> despite being able to take that first move no problem
[22:22:40] <anonimasu> basically what you'd do for lookahead is to see if the machine can make the move happen
[22:23:46] <toastydeath> lookahead is a plan the machine develops so it can make the move happen given the acceleration constraints
[22:23:59] <toastydeath> not strictly "can i" but "what do i need to do so that"
[22:25:11] <anonimasu> isnt that usually slowing down the previous move so you can be within constraints
[22:25:34] <toastydeath> slowing down several moves prior, yes
[22:26:14] <anonimasu> isnt that just adding a extra step to traj..
[22:26:26] <toastydeath> not from what i've seen, no
[22:26:46] <toastydeath> i don't know how emc does it currently, i am not a person who runs emc
[22:26:58] <toastydeath> does it as in, in code
[22:27:22] <toastydeath> most controls now do actual compiling of the toolpath into one unified acceleration profile
[22:27:40] <toastydeath> not just lookahead, because you can have 100 tiny, .0001" moves and then one that screws you up.
[22:31:51] <anonimasu> well, the current traj does blending of thoose moves
[22:32:55] <toastydeath> blending in what sense?
[22:33:12] -!-
mhaberler has quit [Quit: mhaberler]
[22:33:18] <toastydeath> i'm not talking about a straight move, i'm talking about a typical 5 axis part where you have a bunch of nonlinear moves in .0001" increments
[22:33:40] <JT-Shop> does it blend more than XYZ moves with the naive came detector?
[22:37:45] <toastydeath> JT-Shop, i hope you aren't asking me because i don't know the technical details of what emc does
[22:37:45] -!-
i_tarzan has quit [Ping timeout: 252 seconds]
[22:37:46] <toastydeath> sorry
[22:37:59] <JT-Shop> just asking in general
[22:40:00] * anonimasu is reading trajectory planning stuff
[22:40:26] <toastydeath> also this talk of trajectory planning worries me
[22:40:50] <toastydeath> because to me that implies a velocity driven control rather than an accel driven control
[22:41:32] <SWPadnos> the toolpath is specified with a velocity, not an acceleration
[22:41:41] <JT-Shop> toastydeath:
http://www.linuxcnc.org/docview/html/common_User_Concepts.html
[22:41:58] <SWPadnos> so the control must use whatever acceleration it has to attempt to do what the operator asked for, which is to move at a given velocity
[22:42:09] <toastydeath> right, i am saying that other controls moved to acceleration rather than velocity
[22:42:21] <toastydeath> and some of the fanciest are using jerk
[22:42:40] <anonimasu> like the s-curve one we looked at a odd 4 years ago
[22:42:52] <toastydeath> ty for the link, by the way
[22:43:24] <SWPadnos> the order (algebraic) of the calculation doesn't change the fact that the planner is calculating a trajectory, IMO
[22:43:54] <SWPadnos> ie, whether it accel limits, jerk limits, snap limits, etc, doesn't make it a trajectory planner or not a trajectory planner
[22:44:04] <toastydeath> also brb house crisis, sry
[22:45:27] -!-
FinboySlick [FinboySlick!~shark@74.117.40.9] has joined #emc
[22:46:08] <anonimasu> toastydeath: from what I read in the tp it treats movements as a series of requested velocities and tries to keep up to them within machine limits
[22:46:53] -!-
vezza has quit [Quit: Sto andando via]
[22:50:45] <anonimasu> well, bedtime.
[22:58:29] -!-
adb has quit [Ping timeout: 246 seconds]
[23:01:10] <JT-Shop> danimal_garage: you around?
[23:08:36] -!-
El_Matarife [El_Matarife!~El_Matari@adsl-68-88-67-186.dsl.rcsntx.swbell.net] has joined #emc
[23:14:46] <toastydeath> anonimasu, right
[23:14:52] <toastydeath> and i'm saying the next step up is to request accelerations
[23:15:01] <toastydeath> because that is what causes errors, not velocities
[23:15:13] <toastydeath> oh, you left, nvm
[23:18:40] -!-
skunkworks [skunkworks!~chatzilla@str-bb-cable-south2-static-6-78.dsl.airstreamcomm.net] has joined #emc
[23:19:47] -!-
Dave911 [Dave911!~chatzilla@184.18.125.172] has joined #emc
[23:21:09] -!-
Valen [Valen!~Valen@2001:44b8:3199:9100:21e:8cff:fe63:55df] has joined #emc
[23:46:32] -!-
rooks has quit [Quit: So long, and thanks for all the fish.]
[23:55:11] -!-
sumpfralle has quit [Read error: Connection reset by peer]
[23:55:15] -!-
sumpfralle1 [sumpfralle1!~lars@31.16.112.145] has joined #emc
[23:56:47] -!-
grandprix [grandprix!~What@72.47.148.179] has joined #emc
{kind=link}
{kind=link}
{kind=link}