Back
[00:03:11] -!-
theorb [theorb!~theorb@91.84.53.6] has joined #emc
[00:04:18] -!-
theorbtwo has quit [Ping timeout: 272 seconds]
[00:04:21] theorb is now known as
theorbtwo
[00:04:28] -!-
tris has quit [Excess Flood]
[00:04:33] -!-
tris [tris!~tristan@173-164-188-122-SFBA.hfc.comcastbusiness.net] has joined #emc
[00:09:20] -!-
lerman [lerman!~lerman@24-151-1-146.static.nwtn.ct.charter.com] has joined #emc
[00:20:47] -!-
mhaberler has quit [Quit: mhaberler]
[00:21:45] -!-
robh__ has quit [Ping timeout: 250 seconds]
[00:23:55] -!-
bdale has quit [Ping timeout: 250 seconds]
[00:24:00] -!-
bdale [bdale!bip@winfree.gag.com] has joined #emc
[00:45:46] -!-
acemi has quit [Quit: WeeChat 0.3.2]
[00:53:10] <danimal_garage> ok so i'm getting ready to install 2.5, however it says to put the stanza in /etc/apt/sources.list.d/emc2-buildbot.list
[00:53:11] <danimal_garage> that file didnt exist so i sudo gedit /etc/apt/sources.list.d/emc2-buildbot.list and it created it
[00:53:11] <Valen> that should do it
[00:53:11] <Valen> just update
[00:53:11] <danimal_garage> then i copied the deb
http://buildbot.linuxcnc.org/~buildmaster lucid master-rt
[00:53:11] <danimal_garage> deb-src
http://buildbot.linuxcnc.org/~buildmaster lucid master-rt
[00:53:11] <Valen> (you can stick it in sources.list too but thats not "right"
[00:53:11] <Valen> s/too/instead
[00:53:30] <danimal_garage> then i did sudo apt-get update and it did nothing
[00:53:41] -!-
AndChat| [AndChat|!~AndChat@184.250.204.251] has joined #emc
[00:53:54] <Valen> should just download package lists from the new source
[00:53:56] <danimal_garage> i tried sudo apt-get install emc2 as well
[00:54:01] <Valen> do a sudo apt-get dist-upgrade
[00:54:18] <Jymmm> AFTER you've made a backup
[00:54:55] <danimal_garage> didnt do anything
[00:55:14] <danimal_garage> Jymmm, yea, i backed up my config and nc files
[00:55:24] <Jymmm> I meant EVERYTHING
[00:55:26] -!-
GoSebGo has quit [Ping timeout: 246 seconds]
[00:55:46] <Valen> wipe that file you made and stick the deb lines in /etc/apt/sources.list
[00:55:56] <danimal_garage> ok
[00:56:07] <Jymmm> backup the file you made and...
[00:56:22] <Valen> only way to "backup" from an upgrade is a disk image
[00:56:38] <Valen> its a 2 line text file, it doesn't need backing up
[00:56:38] <Jymmm> and your point is?
[00:56:52] <Jymmm> EVERYTHING needs a backup.
[00:57:01] <Jymmm> just ask cradek
[00:57:16] <Valen> cost Vs benifit
[00:57:25] <Valen> you can spend 4 hours doing a disk image backup
[00:57:39] <Valen> or if it screws up put the livecd in and be back where you are in 10 minutes
[00:57:40] <Jymmm> I spend 4 minutes, dont know about you.
[00:57:53] <Valen> you can do a disk image backup in 4 minutes
[00:58:08] <Valen> to a remote location
[00:58:19] <Jymmm> sure
[00:58:29] <Valen> if you say so
[00:59:18] <theorbtwo> There are so many variables in that statement as to render it useless.
[00:59:53] <Valen> to me a disk image backup involves dd if=/dev/sda of=somefile
[00:59:55] <theorbtwo> Do you have 100Mbit ethernet? Gigabit, 10gb, faster? How big is your drive? What are you backing up *to*? How fast is the disk?
[01:00:18] <theorbtwo> Valen: Hm. I'd use rsync with that.
[01:01:27] <Valen> you can rsync a raw disk?
[01:01:43] <Jymmm> you can rsync anything
[01:02:21] <danimal_garage> nothing seems to be working
[01:02:46] <Valen> so you put it in sources.list, did apt-get update , did you put the new sources last?
[01:03:01] <Valen> if so you should see something about those new lines in the output of the update
[01:03:11] <theorbtwo> Beauty of unix. A raw disk is just a big file.
[01:03:12] <danimal_garage> do i put the deb or deb-src url, or both?
[01:03:45] <Jymmm> FWIW, it's far better to do a fresh install than an "upgrade".
[01:04:01] <Valen> he is only upgrading EMC
[01:04:17] <danimal_garage> http://buildbot.linuxcnc.org/~buildmaster/
[01:04:18] <Valen> from 2.4 to 2.5
[01:04:52] <Valen> this should be the last line in sources.list "deb
http://buildbot.linuxcnc.org/~buildmaster lucid master-rt"
[01:04:56] <Valen> yes?
[01:04:58] <Jymmm> Valen: you told him dist upgrade: Valen: do a sudo apt-get dist-upgrade
[01:05:07] <Valen> (you don't need the src)
[01:05:20] <Valen> that only changes version if you have changed sources.list
[01:06:08] <Valen> upgrade is used to install the newest versions of all packages currently installed on the system Vs dist-upgrade, in addition to performing the function of upgrade, also intelligently handles changing dependencies with new versions of packages
[01:06:42] <danimal_garage> it doesnt show as a text file, it's some screen that says software sources
[01:06:52] <Valen> oh right that sounds messy
[01:07:00] <Valen> exit all that helpfull crap lol
[01:07:04] <danimal_garage> lol
[01:07:09] <Valen> sudo nano /etc/apt/sources.list
[01:07:16] <danimal_garage> should i go into gedit and try to open it?
[01:07:22] <Valen> or that yeah
[01:07:22] <danimal_garage> ok
[01:07:34] <Valen> gedit is more Gui than nano, but I'm used to nano ;->
[01:08:00] <danimal_garage> yep
[01:08:08] <danimal_garage> its correct
[01:08:13] <Valen> nice simple text file now?
[01:08:16] <danimal_garage> yes
[01:08:18] <Valen> stick that line at the end
[01:08:23] <danimal_garage> yea it was there
[01:08:32] <Valen> no # in front of it or anything?
[01:08:36] <danimal_garage> nope
[01:08:42] <Valen> ok exit nano
[01:08:46] <Valen> sudo apt-get update
[01:08:50] <danimal_garage> im in gedit but ok
[01:09:09] <Valen> and you should see it looking at that source
[01:09:52] <danimal_garage> ok
[01:09:55] <danimal_garage> done
[01:10:06] <danimal_garage> i had to open a new terminal window to get it to work
[01:10:09] <danimal_garage> weird
[01:10:27] <Valen> so its all worked?
[01:10:42] <danimal_garage> yea
[01:10:51] <Valen> i mean 2.5 is installed
[01:10:56] <danimal_garage> but it still says 2.4.6 when i start emc
[01:11:17] <Valen> did you do the dist-upgrade?
[01:11:27] <Valen> it should have asked you about installing new stuff
[01:12:41] <danimal_garage> opps did update
[01:12:45] <danimal_garage> its going now
[01:12:54] <Valen> thats the stuff
[01:12:57] <danimal_garage> upgrading
[01:13:01] <danimal_garage> thanks
[01:13:21] <Valen> don't thank me yet ;-P
[01:13:44] <Valen> it won't overwrite your configs, so you need to add a line to your HAL (i think) to get that velocity feedback
[01:13:47] <danimal_garage> weird that it wouldnt work with the instructions on the site... maybe because they're for upgrading from 2.3?
[01:13:55] <danimal_garage> right
[01:14:15] <danimal_garage> i added the line already, i just #'d it out
[01:14:21] <Valen> (also the sample configs, dont have that line in them (or at least they didn't have it last I saw))
[01:14:49] <danimal_garage> yea, i got the line from pcw_home
[01:15:01] <danimal_garage> i think it's still in there, i'll have to check
[01:15:06] <Valen> you need one per axis
[01:15:11] <danimal_garage> yea
[01:15:19] <Valen> made a big difference on mine
[01:15:42] <danimal_garage> well emc worked
[01:15:48] <danimal_garage> lemme add the lines now
[01:19:08] <Valen> Jymmm: besides for ubuntu the reccomended method of moving between versions is do-release-upgrade if your doing it from command line
[01:20:13] <Valen> danimal_garage: lemme know how it goes, I gtg do some work
[01:20:18] -!-
Valen has quit [Quit: Leaving.]
[01:22:16] -!-
GoSebGo [GoSebGo!~AndChat@174-16-125-123.hlrn.qwest.net] has joined #emc
[01:23:07] <danimal_garage> well it worked, but it isnt much quieter
[01:24:06] <danimal_garage> i think it's just the noise it's gunna make....it's only the z axis for some reason
[01:24:29] -!-
AndChat| has quit [Ping timeout: 246 seconds]
[01:25:22] <danimal_garage> seems like it's smoother though
[01:25:30] <danimal_garage> is that possible?
[01:28:49] <pcw_home> does the noise follow the drive? maybe Z's maladjusted somehow
[01:31:39] <danimal_garage> oh i dunno
[01:32:02] <danimal_garage> good question
[01:32:26] <danimal_garage> if i hold the pulley and put a little torque on it by hand, it shuts up a little
[01:32:52] <danimal_garage> maybe it just the fact that it's a much lighter axis
[01:48:01] <pcw_home> Do you have any deadzone?
[01:49:45] <danimal_garage> some, 1.5e-05
[01:49:58] -!-
tlab has quit [Quit: Leaving]
[01:50:08] <danimal_garage> should i try more or less?
[01:52:47] <Tom_itx> tie a bungie cord to it
[01:53:07] <cradek> what's the complaint?
[01:53:27] <Tom_itx> noise?
[01:53:39] <danimal_garage> haha
[01:53:45] <danimal_garage> yea, a little noise in z
[01:53:56] <cradek> what kind of noise?
[01:54:18] <danimal_garage> sounds like white noise almost
[01:55:06] <cradek> can you feel the screw buzz if you touch it?
[01:55:52] <danimal_garage> a little
[01:56:10] <danimal_garage> more like an occasional twitch
[01:56:15] <cradek> does it stop if you disable the position loop?
[01:56:19] <cradek> hmm
[01:56:26] <cradek> (are you talking about your hnc?)
[01:56:34] <danimal_garage> no, the shizuoka
[01:56:55] <danimal_garage> position loop?
[01:56:58] <danimal_garage> the p?
[01:57:08] <danimal_garage> or in the hal
[01:57:16] <cradek> I'm asking whether you've been able to figure out if it's the velocity loop or position loop causing it
[01:58:10] <pcw_home> I think danimal_garage has his drives running in torque mode
[01:58:18] <cradek> ah
[01:58:22] <danimal_garage> yes, torque mode
[01:58:30] <cradek> I shouldn't try to help without reading back
[01:58:46] <danimal_garage> well i didnt mention it this time
[01:59:06] <danimal_garage> thankfully the hnc runs fine :)
[01:59:10] -!-
ds3 [ds3!noinf@netblock-66-245-251-24.dslextreme.com] has joined #emc
[01:59:41] <cradek> you hooked up mesa encoder velocity to pid? are you sure you got it wired up right in hal?
[02:00:30] <danimal_garage> yea
[02:00:30] <ds3> anyone think of a reason how an unplug isolator chip can self destruct into a chip with a hole on the package?
[02:01:09] <Tom_itx> unplug what side?
[02:01:20] <Tom_itx> the low side might let the high side run wild
[02:02:09] -!-
pupfield [pupfield!467f4588@gateway/web/freenode/ip.70.127.69.136] has joined #emc
[02:02:23] <danimal_garage> http://pastebin.com/FLdsdRPf
[02:02:30] <danimal_garage> looks right to me
[02:02:52] <danimal_garage> the encoder velocity to pid is at the bottom
[02:03:25] <cradek> I agree
[02:04:16] <Tom_itx> agree with what?
[02:04:30] <danimal_garage> my hal being correct
[02:05:19] <pcw_home> You might try more deadzone. 50 uInch instead of 15
[02:05:20] <pcw_home> then you should be able to push the belt so you are in the deadzone
[02:05:22] <pcw_home> if it quiets down in the deadzone, its tuning, if not its your drive
[02:05:42] <danimal_garage> i tried a ton of deadband, made no difference
[02:05:55] <danimal_garage> and i swapped drives in the past, it follows the axis
[02:06:12] <pcw_home> so its noisy inside the deadzone? (use a mill to be sure)
[02:06:27] <cradek> is there slop anywhere? screw to encoder? motor to screw?
[02:06:29] <pcw_home> s/mill/.001/
[02:06:39] <danimal_garage> these are digital drives, they have their own amount of tuning, which complicates things
[02:06:53] <danimal_garage> no slop
[02:07:08] <danimal_garage> the resolver is on the servo itself
[02:07:25] <danimal_garage> pcw_home, i tried .002
[02:07:35] <pcw_home> in torque mode there should not be any tuning unless the give you access to the current loop tuning
[02:08:26] <pcw_home> so is it noisy with .002 if you move into the deadzone? (by hand)
[02:08:27] <danimal_garage> there's some tuning
[02:08:54] <danimal_garage> maybe a hair quieter
[02:09:01] <danimal_garage> but not much
[02:09:19] <pcw_home> OK so its amp tuning not EMC
[02:09:29] <danimal_garage> probably
[02:09:32] <cradek> or noise?
[02:09:54] <danimal_garage> cradek, i thought so too, but i did a pretty good job of isolating everything i think
[02:09:58] <cradek> ah
[02:10:00] <pcw_home> noise in the resolver leads maybe
[02:10:05] <danimal_garage> i tried different cables, etc
[02:10:31] <danimal_garage> this is the axis that had resolver issues
[02:10:46] <pupfield> #emc-devel
[02:10:56] <danimal_garage> but it keeps its position
[02:12:29] -!-
pupfield [pupfield!467f4588@gateway/web/freenode/ip.70.127.69.136] has parted #emc
[02:12:33] <danimal_garage> btw, i got a sneak preview of the Wired Magazine article, they mention EMC but not much more than that :/
[02:12:44] <danimal_garage> i was hoping they'd go into a little more detail on it
[02:15:05] <pcw_home> can you halmeter the encoder counts on Z when its in the deadzone?
[02:15:07] <pcw_home> that should determine whether its noise from the resolver or the current loop
[02:15:55] -!-
pupfield has quit [Client Quit]
[02:17:28] <cradek> or set all your pid parameters to 0 and see if it quiets down
[02:17:38] <cradek> at least I think that'd do it
[02:18:03] -!-
unix [unix!~Adium@74.43.50.208] has joined #emc
[02:18:29] unix is now known as
Guest70356
[02:18:58] <danimal_garage> the counts jump a little
[02:19:09] Guest70356 is now known as
TJB1
[02:19:20] -!-
seb_kuzminsky [seb_kuzminsky!~seb@174-16-125-123.hlrn.qwest.net] has joined #emc
[02:20:05] -!-
p [p!467f4588@gateway/web/freenode/ip.70.127.69.136] has joined #emc
[02:20:13] <danimal_garage> if i set it to zero it ferrors right away
[02:20:30] p is now known as
Guest94805
[02:20:39] <cradek> increase your ferror limit to an inch
[02:20:56] <cradek> it shouldn't creep too fast
[02:21:02] <cradek> er - it doesn't fall does it?
[02:22:26] <danimal_garage> actually it quiets some if i add p or i and decrease the deadband
[02:22:46] <cradek> I'm not a believer in deadband
[02:22:49] <danimal_garage> it might fall some
[02:23:00] <cradek> it makes the pid output 0 when close enough
[02:23:09] <pcw_home> vertical axis?
[02:23:10] <cradek> it is a leap of faith to think that makes the axis stay still
[02:24:06] <pcw_home> deadzone will not help on a axis with bias (gravity)
[02:24:40] <cradek> or any offset/creep
[02:25:25] <pcw_home> yeah really only of minor use quieting a idle machine
[02:25:57] <danimal_garage> yea it's a vertical axis
[02:26:08] <danimal_garage> i know it drops like a rock without the belt on it
[02:26:23] <pcw_home> well then maybe 0 deadzone is better
[02:26:29] <danimal_garage> i added a bunch more p and i and it helped
[02:26:40] <danimal_garage> yea, i reduced it a ton and it helped
[02:27:54] <cradek> wonder if you should mess with pid bias to make it not fall
[02:28:14] <cradek> some constant amount of torque will balance it
[02:28:20] <danimal_garage> the bias is set so the ferror is even between z+ and z-
[02:28:31] <cradek> ah
[02:28:38] <pcw_home> running the servo loop faster would probably help as well too bad CL is so slow
[02:28:50] <danimal_garage> ha, yea, my damn ladder
[02:29:13] <cradek> then put it in a slower thread
[02:29:21] <danimal_garage> i was wondering about that
[02:29:32] <cradek> hm - it will get interrupted by motion then - whether that's ok depends on what the ladder is doing I bet
[02:29:34] <danimal_garage> didnt know how to go about it though
[02:29:41] <pcw_home> can the slower thread be interrupted by the faster thread?
[02:29:53] <cradek> yes that's how it works
[02:29:58] <danimal_garage> it's just my toolchanger and other non important stuff
[02:30:34] <Tom_itx> danimal_garage, my observations the last couple weeks here watching how emc works makes me think it's hard to tune properly
[02:31:02] <Tom_itx> is this an isolated incident or is emc hard to learn and use?
[02:31:27] <danimal_garage> Tom_itx, depends on how intuitive and experienced you are
[02:31:31] <pcw_home> PID loops are hard to tune period without experience
[02:31:38] <cradek> Tom_itx: tuning PID loops is a bit of an art and EMC cannot change that
[02:31:39] <danimal_garage> i am NOT a computer guy, so it's hard for me
[02:31:43] <Tom_itx> i know how big a pain PID loops can be
[02:32:12] <danimal_garage> Tom_itx, i'd say it's worth getting in to, it's pretty cool
[02:32:21] <cradek> danimal_garage put ebay servos and amps on his mill - getting the tuning right on his mill is as hard as it gets
[02:32:34] <danimal_garage> exactly
[02:32:34] <cradek> starting with servos and amps that come on a machine is a lot easier.
[02:32:38] <Tom_itx> i've kinda been watching it for several years and see it's come a long long ways
[02:32:53] <danimal_garage> my hardinge was tuned in about 5 minutes
[02:33:02] <danimal_garage> well, 30 minutes :)
[02:33:08] <Tom_itx> having not used it yet, it almost seems too flexible to me
[02:33:21] <pcw_home> Theres some kind of pyvcp? tuning program on the forum...
[02:33:38] <danimal_garage> Tom_itx, it's not too bad to get a basic running machine
[02:33:51] <cradek> it comes down to: what's your application
[02:33:54] <Tom_itx> i have no specific need for it but i sorta want to get into it a bit
[02:34:02] <danimal_garage> when you start integrating stuff like toolchangers and whatnot, it gets a little more dificult
[02:34:09] <Tom_itx> i'm sure
[02:34:31] <danimal_garage> i'm a bad example
[02:34:44] <Tom_itx> no, you're a perfect example imo
[02:34:56] <Tom_itx> little linux experience
[02:35:09] <danimal_garage> no linux experience lol
[02:35:22] <danimal_garage> i havent touched linux outside of emc
[02:35:30] <Tom_itx> so many linux users assume if you're getting into it you should know it all from the get go
[02:35:55] <danimal_garage> it isnt easy
[02:35:57] <Tom_itx> i try to pick up a few bits and pieces along the way
[02:36:16] <pcw_home> (btw a nice missing PID comp feature at least when tuning would be for it to to clear the I term if KI is set to 0)
[02:36:30] <Tom_itx> i managed to get a server and website up with it with a little help
[02:36:31] <danimal_garage> i can only learn by doing, so it's probably harder for me than most
[02:37:15] <cradek> pcw_home: oh does the I accum just stay where it was?
[02:37:33] <danimal_garage> i think i'm gunna call it a day with this... it runs fine, just a little noisy
[02:38:25] <danimal_garage> i think that if i could lock the servo, it would be quiet like the rest
[02:38:41] <danimal_garage> the other axii have quite a bit more weight on them
[02:38:52] <Tom_itx> i generally start with the P term tuning pid and add in a little D as needed
[02:39:02] <danimal_garage> Tom_itx, thats what i did
[02:39:03] <Tom_itx> is that the recomended process with emd?
[02:39:06] <Tom_itx> emc
[02:39:08] <danimal_garage> yes
[02:39:14] <danimal_garage> epmd?
[02:39:20] <danimal_garage> :)
[02:39:26] <Tom_itx> then once you find the overshoot point, back off a bit and add in some I
[02:39:44] <Tom_itx> it will start to oscilate like hell
[02:39:59] <danimal_garage> unfortnately since most of the tuning is done in my drives, the tuning in emc makes very little difference
[02:40:09] <Tom_itx> at that point, P can't do any more
[02:40:24] <danimal_garage> the lathe was much easier to tune
[02:40:33] <danimal_garage> analog drives
[02:40:39] <cradek> velocity mode
[02:40:44] <danimal_garage> yea
[02:40:55] <Tom_itx> i'll prolly start with steppers anyway so it may not be as much an issue there
[02:41:01] <cradek> matched mechanics/servos/amps
[02:41:04] <danimal_garage> steppers were pretty easy
[02:41:12] <pcw_home> cradek yes so if you turn I on and of you can get a big surprize
[02:41:45] <danimal_garage> cradek, i wish i could have gone that way with the mill, but it is what it is.
[02:41:59] <danimal_garage> for what i have into it, i think it turned out decent
[02:42:03] <Tom_itx> i take it hal is the langage behind emc where all the goodies are
[02:42:17] <cradek> danimal_garage: sounds perfectly good then
[02:42:19] <danimal_garage> Tom_itx, in a nut shell
[02:42:56] <danimal_garage> cradek, i couldnt afford to spend 3k on servos and drives (used)
[02:42:58] <Tom_itx> how long have you been working with it?
[02:43:51] <danimal_garage> Tom_itx, i built my mill almost 2 years ago, but it was steppers and VERY basic
[02:44:03] <danimal_garage> it slowly progressed
[02:44:18] <danimal_garage> i built my cnc lathe about a year ago
[02:44:29] <danimal_garage> i did most of my learning there
[02:45:22] <danimal_garage> almost a year of that was just running the machines, very little emc work
[02:45:41] <danimal_garage> i forgot a bit over that period
[02:46:00] -!-
Guest94805 has quit [Quit: Page closed]
[02:47:58] -!-
TJB1 has quit [Read error: Connection reset by peer]
[03:15:33] <danimal_garage> well i guess i'm off to the dog park, thanks for the help everyone
[03:15:55] -!-
danimal_garage has quit [Read error: Connection reset by peer]
[03:16:15] -!-
danimal_garage [danimal_garage!~danimal_g@ip98-176-169-90.sd.sd.cox.net] has joined #emc
[03:37:00] -!-
Tom_L [Tom_L!~Tl@unaffiliated/toml/x-013812] has joined #emc
[03:37:57] -!-
OoBIGeye has quit [Ping timeout: 276 seconds]
[03:39:03] -!-
OoBIGeye [OoBIGeye!~kent@81-235-188-139-no48.tbcn.telia.com] has joined #emc
[04:10:52] -!-
krushia has quit [Quit: WeeChat 0.3.2]
[04:12:19] -!-
krushia [krushia!~krushia@h69-131-92-179.cntcnh.dsl.dynamic.tds.net] has joined #emc
[04:18:05] -!-
Tom_L has quit []
[04:20:04] -!-
krushia has quit [Quit: WeeChat 0.3.2]
[04:24:34] -!-
OoBIGeye has quit [Ping timeout: 260 seconds]
[04:24:43] -!-
ve7it has quit [Remote host closed the connection]
[04:24:51] -!-
OoBIGeye [OoBIGeye!~kent@81-235-188-139-no48.tbcn.telia.com] has joined #emc
[04:25:49] -!-
krushia [krushia!~krushia@h69-131-92-179.cntcnh.dsl.dynamic.tds.net] has joined #emc
[04:39:44] -!-
OoBIGeye has quit [Ping timeout: 260 seconds]
[04:39:56] -!-
OoBIGeye [OoBIGeye!~kent@81-235-188-139-no48.tbcn.telia.com] has joined #emc
[04:42:36] -!-
Tom_L [Tom_L!~Tl@unaffiliated/toml/x-013812] has joined #emc
[04:49:47] -!-
Tom_L has quit []
[04:57:17] -!-
GoSebGo has quit [Ping timeout: 246 seconds]
[04:59:50] -!-
nullie [nullie!~nullie@nullie.telenet.ru] has joined #emc
[05:28:01] -!-
GoSebGo [GoSebGo!~AndChat@174-16-125-123.hlrn.qwest.net] has joined #emc
[05:34:24] -!-
nullie has quit [Quit: Ex-Chat]
[05:50:30] -!-
dgarr has quit [Ping timeout: 240 seconds]
[05:52:54] -!-
GoSebGo has quit [Quit: Bye]
[06:07:53] -!-
jmkasunich has quit [Ping timeout: 264 seconds]
[06:31:32] -!-
psha [psha!~psha@213.208.162.69] has joined #emc
[06:41:20] -!-
mhaberler [mhaberler!~mhaberler@extern-181.stiwoll.mah.priv.at] has joined #emc
[07:04:25] -!-
nullie [nullie!~nullie@dhcp249-250.yandex.net] has joined #emc
[07:24:31] -!-
mk0 [mk0!bassogigas@178.120.16.46] has joined #emc
[07:38:20] -!-
Valen [Valen!~Valen@ppp121-44-18-98.lns20.syd6.internode.on.net] has joined #emc
[07:44:32] <psha> mk0: получилось?
[07:48:01] -!-
pingufan [pingufan!~rainer@goliath.hantsch.co.at] has joined #emc
[08:07:16] -!-
mhaberler has quit [Quit: mhaberler]
[08:10:47] -!-
mhaberler [mhaberler!~mhaberler@extern-181.stiwoll.mah.priv.at] has joined #emc
[08:10:53] -!-
cradek has quit [Ping timeout: 264 seconds]
[08:10:58] -!-
cradek [cradek!~chris@outpost.timeguy.com] has joined #emc
[08:26:16] -!-
mk0 has quit []
[08:43:55] -!-
mhaberler has quit [Quit: mhaberler]
[08:54:13] -!-
danimal_garage has quit [Ping timeout: 250 seconds]
[08:58:40] -!-
danimal_garage [danimal_garage!~danimal_g@ip98-176-169-90.sd.sd.cox.net] has joined #emc
[09:01:09] -!-
mhaberler [mhaberler!~mhaberler@imac.stiwoll.mah.priv.at] has joined #emc
[09:02:50] -!-
robh__ [robh__!~robert@5ace70bc.bb.sky.com] has joined #emc
[09:27:47] -!-
adb [adb!~Moldovean@178-211-232-101.dhcp.voenergies.net] has joined #emc
[09:41:18] -!-
Valen has quit [Ping timeout: 276 seconds]
[09:44:45] -!-
mhaberler has quit [Quit: mhaberler]
[09:51:01] -!-
Valen [Valen!~Valen@ppp121-44-109-187.lns20.syd6.internode.on.net] has joined #emc
[09:56:20] <Valen> danimal_garage: how did it go?
[10:08:30] -!-
awallin_ [awallin_!~quassel@2001:708:110:1020:224:7eff:feda:7c7d] has joined #emc
[10:34:29] -!-
mk0 [mk0!~bassogiga@fiztech.basnet.by] has joined #emc
[10:34:30] -!-
mhaberler [mhaberler!~mhaberler@imac.stiwoll.mah.priv.at] has joined #emc
[10:35:02] -!-
mhaberler_ [mhaberler_!~mhaberler@intern-158.stiwoll.mah.priv.at] has joined #emc
[10:46:35] <jthornton> deb, deb where is the 2.5 deb?
[10:47:18] <psha> buildbot.linuxcnc.org
[10:47:26] <psha> jthornton: hi
[10:47:48] <jthornton> psha: thanks
[10:56:57] -!-
mk0_lan_died [mk0_lan_died!~bassogiga@fiztech.basnet.by] has joined #emc
[11:00:17] -!-
mk0 has quit [Ping timeout: 240 seconds]
[11:00:48] -!-
mk0_lan_died has quit [Client Quit]
[11:00:54] -!-
mk0 [mk0!~bassogiga@fiztech.basnet.by] has joined #emc
[11:33:08] <psha> mk0: succeded?
[11:42:03] <mk0> nope -> private )
[11:51:58] -!-
emcrules_mill has quit [Read error: Connection reset by peer]
[11:52:17] -!-
mhaberler has quit [Quit: mhaberler]
[11:52:17] mhaberler_ is now known as
mhaberler
[11:52:18] -!-
mhaberler has quit [Quit: mhaberler]
[11:59:25] -!-
adb has quit [Ping timeout: 250 seconds]
[11:59:44] <TekniQue> anyone have much experience with linear bearings?
[12:00:06] <TekniQue> my question is: do closed linear bearings always suck this much?
[12:00:10] <TekniQue> ie, massive play in them
[12:00:33] <TekniQue> I've found that open bearings serve me much better, even with a non supported shaft
[12:00:44] <TekniQue> because I can tighten them up after mounting
[12:00:54] <TekniQue> with that screw in the back of the pillow block
[12:01:02] <TekniQue> and that removes all play
[12:02:15] -!-
adb [adb!~Moldovean@178-211-232-101.dhcp.voenergies.net] has joined #emc
[12:03:11] <jthornton> no
[12:07:29] -!-
emcrules_mill [emcrules_mill!~jp1@CPE001310e6c94f-CM001bd71cb794.cpe.net.cable.rogers.com] has joined #emc
[12:17:44] -!-
KimK [KimK!~Kim__@ip174-71-95-176.om.om.cox.net] has parted #emc
[12:18:18] -!-
Ze1982 has quit [Quit: Leaving]
[12:20:00] <archivist> TekniQue, depends which you have, some have 0 play specs
[12:20:11] -!-
JT-Shop [JT-Shop!~chatzilla@216-41-156-49.semo.net] has joined #emc
[12:20:33] <JT-Shop> http://i47.photobucket.com/albums/f163/johnplctech/Shop%20Addition/P2200010.jpg
[12:20:44] <JT-Shop> http://i47.photobucket.com/albums/f163/johnplctech/Shop%20Addition/P2190008.jpg
[12:21:37] <archivist> heh been having a picnic in there already
[12:22:17] <JT-Shop> a place to rest my tired body
[12:22:29] <archivist> how many machines to go in :)
[12:22:41] <JT-Shop> at least I need/have temporary lights now
[12:22:52] <JT-Shop> all of them go in
[12:23:28] <archivist> and then extend original to new size ?
[12:23:50] <JT-Shop> ?
[12:24:31] -!-
Ze1982 [Ze1982!~Ze1982@ppp255-131.static.internode.on.net] has joined #emc
[12:24:55] <archivist> to the left of the ladder
http://i47.photobucket.com/albums/f163/johnplctech/Shop%20Addition/P2200010.jpg
[12:26:06] <JT-Shop> the garage is 1040 sq ft and the shop is 960 sq ft so 2000 sq ft total
[12:27:02] <JT-Shop> garage is 26' x 40' and the shop is 30' x 32'
[12:29:17] <JT-Shop> I would have made it bigger but ran out of flat ground
http://i47.photobucket.com/albums/f163/johnplctech/Shop%20Addition/P1010067.jpg
[12:30:07] <archivist> but I spotted a digger and spare earth
[12:30:41] <JT-Shop> yes :) and I have more earth to move to in front of the shop and garage
[12:41:25] <JT-Shop> I need to try and figure out where the machines are going so I can wire the shop :/
[12:45:30] -!-
skunkworks has quit [Ping timeout: 240 seconds]
[12:54:24] -!-
Connor2 [Connor2!~Connor@75.76.30.113] has joined #emc
[12:56:27] -!-
Connor has quit [Ping timeout: 250 seconds]
[13:20:43] -!-
adb has quit [Ping timeout: 250 seconds]
[13:23:17] -!-
jimmy111 [jimmy111!~jimmy111@72-36-59-61.actaccess.net] has joined #emc
[13:24:27] -!-
jimmy111 has quit [Client Quit]
[13:25:10] -!-
EDocToor has quit [Quit: ChatZilla 0.9.86 [Firefox 3.6.13/20101203075014]]
[13:25:28] -!-
jimmy111 [jimmy111!~jimmy111@72-36-59-61.actaccess.net] has joined #emc
[13:26:16] -!-
jimmy111 has quit [Client Quit]
[13:35:40] -!-
pingufan has quit [Remote host closed the connection]
[13:37:49] -!-
Valen has quit [Quit: Leaving.]
[13:42:33] -!-
toastydeath has quit [Quit: Leaving]
[13:42:37] -!-
skunkworks [skunkworks!447329d2@gateway/web/freenode/ip.68.115.41.210] has joined #emc
[13:57:16] -!-
adb [adb!~Moldovean@178-211-232-101.dhcp.voenergies.net] has joined #emc
[14:03:17] -!-
JT-Shop has quit [Ping timeout: 246 seconds]
[14:03:28] -!-
jthornton has quit [Ping timeout: 272 seconds]
[14:11:10] -!-
adb has quit [Ping timeout: 240 seconds]
[14:12:28] -!-
adb [adb!~Moldovean@178-211-232-101.dhcp.voenergies.net] has joined #emc
[14:36:21] -!-
GoSebGo [GoSebGo!~AndChat@174-16-125-123.hlrn.qwest.net] has joined #emc
[14:44:41] -!-
jthornton [jthornton!~chatzilla@216-41-156-49.semo.net] has joined #emc
[14:48:04] -!-
mk0 has quit [Quit: Leaving]
[14:49:04] -!-
adb has quit [Ping timeout: 272 seconds]
[14:49:41] -!-
adb [adb!~Moldovean@178-211-232-101.dhcp.voenergies.net] has joined #emc
[15:11:00] -!-
skunkworks has quit [Ping timeout: 245 seconds]
[15:16:55] -!-
skunkworks [skunkworks!447329d2@gateway/web/freenode/ip.68.115.41.210] has joined #emc
[15:16:57] -!-
seb_kuzminsky has quit [Ping timeout: 240 seconds]
[15:17:59] -!-
JT-Shop [JT-Shop!~chatzilla@216-41-156-49.semo.net] has joined #emc
[15:20:26] -!-
skunkworks_ [skunkworks_!447329d2@gateway/web/freenode/ip.68.115.41.210] has joined #emc
[15:21:50] -!-
skunkworks has quit [Ping timeout: 245 seconds]
[15:31:22] -!-
tom3p [tom3p!~tomp@74-93-88-241-Illinois.hfc.comcastbusiness.net] has joined #emc
[15:31:57] -!-
GoSebGo has quit [Ping timeout: 240 seconds]
[15:32:34] -!-
GoSebGo [GoSebGo!~AndChat@108.105.79.165] has joined #emc
[15:34:31] -!-
EDocToor has quit [Quit: ChatZilla 0.9.86 [Firefox 3.6.13/20101203075014]]
[15:35:03] -!-
cncjunior [cncjunior!~chatzilla@89.45.255.96] has joined #emc
[15:35:42] <cncjunior> hello
[15:35:42] <the_wench> hello cncjunior, you have a question?
[15:35:53] <cncjunior> yes
[15:36:22] <cncjunior> about digitizing using a renishaw probe
[15:37:25] <cncjunior> how can i use the gridprobe.ngc example ?
[15:38:39] <cncjunior> I don't know where to link - what parport pin - the signal from the probe
[15:39:26] <cncjunior> OR
[15:39:52] <cradek> http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?Touch_Probe
[15:40:00] <JT-Shop> motion.probe-input
[15:40:00] <cncjunior> is there a *ini file for probing / digitizing ?
[15:40:09] <JT-Shop> http://www.linuxcnc.org/docview/html/man/man9/axis.9.html
[15:40:46] <JT-Shop> morning cradek
[15:40:55] <cradek> hi
[15:40:55] <the_wench> hello cradek, you have a question?
[15:42:45] <cncjunior> Thank you
[15:43:57] -!-
GoSebGo has quit [Ping timeout: 240 seconds]
[15:44:20] <skunkworks_> well - we went from 50 deg to 8 inches of snow...
[15:46:41] <JT-Shop> 64F here
[15:49:10] * JT-Shop is making parts on the BP and roofing at the same time :)
[15:55:30] <skunkworks_> cool :)
[15:56:47] -!-
GoSebGo [GoSebGo!~AndChat@ucb-np2-178.colorado.edu] has joined #emc
[16:03:27] -!-
GoSebGo has quit [Ping timeout: 240 seconds]
[16:06:42] -!-
GoSebGo [GoSebGo!~AndChat@184-209-85-28.pools.spcsdns.net] has joined #emc
[16:15:00] <JT-Shop> yea, I can go up there every hour or so and nail a few down and it is not as tough on my leg muscles
[16:16:34] -!-
tom3p has quit [Read error: Connection reset by peer]
[16:19:02] -!-
tom3p [tom3p!~tomp@74-93-88-241-Illinois.hfc.comcastbusiness.net] has joined #emc
[16:26:32] -!-
seb_kuzminsky [seb_kuzminsky!~seb@71.33.237.102] has joined #emc
[16:39:48] -!-
nullie has quit [Quit: Ex-Chat]
[16:41:20] -!-
X704 [X704!~walter@tiwake.com] has joined #emc
[16:44:47] -!-
toastydeath [toastydeath!~toast@c-69-140-223-139.hsd1.md.comcast.net] has joined #emc
[16:45:34] -!-
WalterN has quit [Ping timeout: 268 seconds]
[16:47:02] X704 is now known as
WalterN
[17:10:29] <tom3p> in halscope, how to measure time? does the display "f(.00002)" mean at time trigger + 20uS?
[17:12:42] -!-
seb_kuzminsky has quit [Ping timeout: 268 seconds]
[17:12:58] <cradek> yes
[17:15:46] <tom3p> are there any measuring tools ( like vertical cursors )?
[17:15:49] <tom3p> since f(n) occurs twice and f(0) occurs 3 times its confusing to find durations
[17:16:26] <cradek> I don't understand what you mean about there being three f(0)
[17:16:34] <cradek> since there is only one trigger point during the capture
[17:16:50] <tom3p> f(-.0000) f(.0000) f(.0000) from left to right
[17:17:15] <tom3p> id have to amke a movie but it happens on any trace near 0
[17:17:21] <cradek> the center one is probably 0
[17:17:34] <cradek> the others are not 0, but you can't see the numbers that are nonzero
[17:21:55] -!-
awallin_ has quit [Remote host closed the connection]
[17:26:48] -!-
adb has quit [Ping timeout: 246 seconds]
[17:27:38] -!-
adb [adb!~Moldovean@178-211-232-101.dhcp.voenergies.net] has joined #emc
[17:28:58] -!-
odiug [odiug!~guido@p57BD0B13.dip0.t-ipconnect.de] has joined #emc
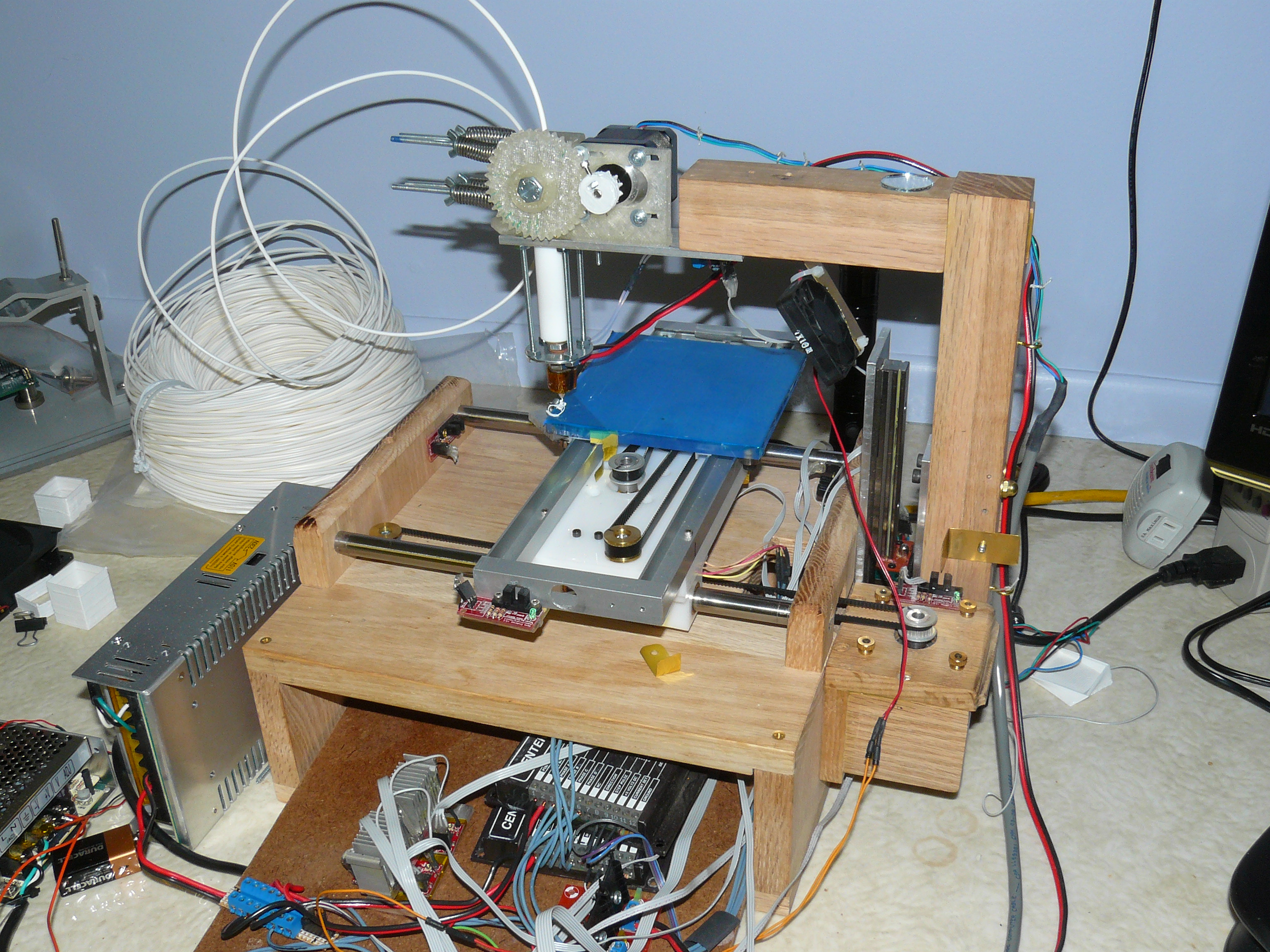
[17:29:56] <mrsunshine> http://img513.imageshack.us/img513/2697/17500110150101318668648.jpg <-- new belt drive for the mill :=)
[17:30:23] <tom3p> i think i see the problem... hakscopes' horz granularity is given at top of halscope , in my example "5.00 uSec per div".The cursor snaps to every 5uS sample BUT the "f(n) display is in 10uSec units, so -5uS shows as f(-.0000) 0uS shows as f(.00000) +5uS shows as f(.00000)
[17:30:24] <tom3p> but you can't see the numbers that are nonzero
[17:30:41] <tom3p> ^^ ignore last line :(
[17:35:27] -!-
GoSebGo has quit [Ping timeout: 240 seconds]
[17:35:33] -!-
mk0 [mk0!bassogigas@178.126.195.190] has joined #emc
[17:38:25] -!-
acemi [acemi!~acemi@unaffiliated/acemi] has joined #emc
[17:39:53] <tom3p> mrsunshine, what manufacture of mill is that? the square dovetailed column is interesting, is it rack & pinion?
[17:40:00] -!-
ve7it [ve7it!~LawrenceG@S0106009027972e37.pk.shawcable.net] has joined #emc
[17:40:57] -!-
odiug has quit [Ping timeout: 240 seconds]
[17:41:00] <mrsunshine> tom3p, the mill ? .. its a sieg super X1, tho branded with some other name :P
[17:41:19] <mrsunshine> braneded with "Meec" i think
[17:41:25] <Connor2> Hey guys, something that's been bugging me for a while.. EMC requires a RT Kernel.. WTF Does Mach3 do with Windows ?
[17:41:40] Connor2 is now known as
Connor
[17:42:00] <ve7it> runs there own version of an RT kernel
[17:42:08] <Jymmm> Connor: It uses a custom written VXD driver
[17:42:15] -!-
GoSebGo [GoSebGo!~AndChat@174-16-125-123.hlrn.qwest.net] has joined #emc
[17:42:24] -!-
WalterN has quit [Quit: Leaving]
[17:42:56] <Connor> Mach3 Looks to me more prevalent that EMC.. But, I'm happy with EMC ..
[17:43:04] <Connor> I guess people are afraid of Linux ..
[17:43:31] <Connor> I do wish EMC had a nice GUI config manager (more than what stpeconf does)
[17:43:49] <ve7it> depends if you want open source... much more flexible for the technically inclined
[17:43:53] <JT-Shop> and they think if they "pay" for something it has to be better and if you can "sell" something then you promote it more
[17:46:30] <Connor> I got my E-Stop wired up. Got my Computer Draw working with a cable management arm built from 5 hinges and wood stir sticks from HomeDepot. Got my AC Wiring reworked, only have 1 plug now for the CNC, florescent light and Stepper motor PSU on a switch, Computer and router are plugged into a internal outlet
[17:46:51] <Connor> Made some mounts for my Slot Sensors for the Y Axis.
[17:47:16] <Jymmm> pics or it never happened
[17:48:12] <Connor> If I can get my End Stops finished up.. then.. that's pretty much it.. only leaves PID speed controller for Bosch router and a different cable management (I.E. Drag Chain) vs the crappy split loome stuff.
[17:48:44] <Connor> I need to clean up the area a little bit and I'll take some pictures.. probably tonight
[17:49:27] <Connor> I like the SuperPID motor controller, but dude wants way too much money for what it is..
[17:50:33] <Connor> I just need to know what values to use for a voltage divider.. so I can detect Zero Crossing, and I can build my own. I don't need a fancy RPM LCD...
[17:50:46] <Connor> and I know how to program micros.. probably could use EMC itself to do it.
[17:52:07] <mikegg> brainstorm with me a sec guys
[17:52:25] <mikegg> what could cause EMC2 to turn off mid program and not throw an error
[17:52:33] <mikegg> using 7i43
[17:52:46] <mikegg> gecko drive on the z-axis
[17:52:55] <mikegg> and a 7i33
[17:55:06] <cpresser_> mikegg: which error? that would be the most important question
[17:55:31] <mikegg> no error, that's the problem
[17:55:32] <skunkworks_> mikegg: does it exit emc?
[17:55:33] <mikegg> just stops
[17:55:37] <mikegg> nope
[17:55:59] <cpresser_> ah sorry.. didnt read correctly
[17:56:02] <skunkworks_> estop?
[17:56:10] <cpresser_> check the syslog/dmesg?
[17:56:16] <skunkworks_> or just stops the program?
[17:56:24] <mikegg> could supplying DC power to the 7i43 through a transformer and rectifier without a filter cap cause problems
[17:56:54] <mikegg> stops the program and turns the machine "OFF"
[17:56:58] <mikegg> hmm
[17:57:02] <skunkworks_> yihes - not going to help
[17:57:38] <mikegg> wait, could be e-stop
[17:57:41] <pcw_home> umm the 7I43 needs filtered, regulated 5V +- 10%
[17:57:54] <mikegg> hmm
[17:57:55] <skunkworks_> *yikes
[17:58:25] <mikegg> i bet that has something to do with it
[17:58:37] <danimal_garage> mornin
[17:58:50] <JT-Shop> morning Dan
[17:59:40] <pcw_home> beware with unreg, more than ~7V and fryola
[17:59:40] <danimal_garage> morning John
[18:01:42] -!-
seb_kuzminsky [seb_kuzminsky!~seb@174-16-125-123.hlrn.qwest.net] has joined #emc
[18:02:27] <Jymmm> Sing it with me... "Who let the (magic) smoke out..." to the tune of "who let the dogs out"
[18:03:13] <mikegg> I think I have a 5vdc regulator somewhere around here
[18:03:31] <Jymmm> http://www.amazon.com/gp/dmusic/media/sample.m3u/ref=dm_sp_smpl?ie=UTF8&catalogItemType=track&ASIN=B000SZILJ4
[18:04:34] <Jymmm> better link, click PLAY
http://www.amazon.com/Who-Let-The-Dogs-Out/dp/B000SZILJ4
[18:04:35] <pcw_home> If you dont need more than 500 ma or so a USB cable may be the easiest
[18:04:46] <Jymmm> ewwwwwwwwwwwwwwwwww
[18:09:02] -!-
motioncontrol [motioncontrol!~i@host22-76-dynamic.17-87-r.retail.telecomitalia.it] has joined #emc
[18:11:31] <JT-Shop> darn my roofing is over with for the day... it's raining... I think I'll take a nap
[18:13:32] <mrsunshine> tom3p, rack and pinnion btw? ...
[18:24:58] -!-
Athlocatle has quit [Quit: �����]
[18:26:01] <tom3p> thx
[18:34:05] -!-
cncjunior has quit [Remote host closed the connection]
[18:51:57] -!-
GoSebGo has quit [Ping timeout: 240 seconds]
[19:04:22] -!-
mrsunshine_ [mrsunshine_!~mrsunshin@c-bc3de253.4551536--62697410.cust.bredbandsbolaget.se] has joined #emc
[19:06:50] -!-
mrsunshine has quit [Ping timeout: 240 seconds]
[19:07:43] -!-
micges [micges!~micges@cez241.neoplus.adsl.tpnet.pl] has joined #emc
[19:09:42] <danimal_garage> yawn
[19:10:03] -!-
tris has quit [Ping timeout: 246 seconds]
[19:12:38] -!-
tris [tris!~tristan@173-164-188-122-SFBA.hfc.comcastbusiness.net] has joined #emc
[19:12:38] -!-
tris has quit [Excess Flood]
[19:15:04] -!-
WalterN [WalterN!~walter@tiwake.com] has joined #emc
[19:18:52] -!-
e3m [e3m!~IceChat7@217.96.27.167] has joined #emc
[19:21:44] -!-
micges [micges!~micges@cez241.neoplus.adsl.tpnet.pl] has parted #emc
[19:24:00] -!-
tris [tris!~tristan@173-164-188-122-SFBA.hfc.comcastbusiness.net] has joined #emc
[19:37:40] <danimal_garage> so to use feed-per-rev in my lathe, do i connect the motion.spindle-speed-out pin to the motion.spindle-speed-in pin?
[19:38:10] <JT-Shop> do you have an encoder on your spindle?
[19:38:34] <cradek> speed-out-rps to speed-in, I think
[19:38:50] <cradek> check the docs ('emc connections to hal') to be sure
[19:39:16] <danimal_garage> ah ok thanks
[19:39:27] <danimal_garage> i'll check it out
[19:39:39] <mrsunshine_> gah, cant find a place for my powersupply in the new controlbox :P
[19:39:47] <mrsunshine_> and want to mount it on the outside :P
[19:41:08] <JT-Shop> danimal_garage:
http://www.linuxcnc.org/docview/html/examples_spindle.html#cha:Spindle-Feedback
[19:43:14] <Connor> How do you do that with just a single tick?
[19:43:21] <danimal_garage> well that seems to be for an encoder, which i don't have hooked up yet. but it does look like cradek is correct according to that, if i understand it right
[19:43:52] <danimal_garage> i'll give it a shot
[19:44:00] <danimal_garage> thanks!
[19:44:12] -!-
TekniQue has quit [Ping timeout: 272 seconds]
[19:44:54] <Connor> and, does anyone have a schematic and values for hooking up Live mains (120v AC) to a opto so I can detect Zero crossover ? I'm pretty sure I can do it with a voltage divider, but, getting the right values to handle the CURRENT without smoking the resistor is proving problematic at best.
[19:47:20] <pcw_home> 5 mA should be OK so thats like 22K (1W) (make sure you have a AC opto or a reverse protection diode across the LED
[19:47:54] <Connor> It's being sent through a diode first to convert it to half wave AC
[19:48:01] <Connor> err. DC
[19:48:50] <Connor> looking for info on my opto.. one sec..
[19:49:29] <pcw_home> ok if you have a high voltage diode in series then 22K 1/2W would be OK if you have a more sensitive opto then a higher series resistor can be used
[19:52:00] <Connor> PC817 is the opto'sI have.
[19:52:46] <Connor> back in a bit, lunch.
[19:55:25] -!-
pcw_home has quit [Remote host closed the connection]
[19:55:44] -!-
Jymmm has quit [Remote host closed the connection]
[19:55:51] -!-
pcw_home [pcw_home!~chatzilla@ip-66-80-167-54.sjc.megapath.net] has joined #emc
[19:56:02] -!-
Jymmm [Jymmm!~jymmm@unaffiliated/jymmm] has joined #emc
[19:57:20] <danimal_garage> hmm it's not feeding
[19:58:03] <danimal_garage> g96 for the spindle, g95 for the feedrate
[19:58:10] -!-
pcw_home has quit [Remote host closed the connection]
[19:58:32] -!-
pcw_home [pcw_home!~chatzilla@ip-66-80-167-54.sjc.megapath.net] has joined #emc
[20:12:10] -!-
WalterN has quit [Ping timeout: 240 seconds]
[20:16:13] <danimal_garage> so it loos like i just do net spindle-speed-loop motnion.spindle-revs => motion.spindle-speed-in but it wont feed with that
[20:16:40] <cradek> nooo
[20:16:49] <cradek> spindle-revs is an input
[20:18:05] <danimal_garage> ohhh
[20:18:24] <danimal_garage> doh
[20:19:51] <danimal_garage> makes more sense now :)
[20:22:12] -!-
motioncontrol has quit [Quit: Sto andando via]
[20:31:55] -!-
odiug [odiug!~guido@p57BD0B13.dip0.t-ipconnect.de] has joined #emc
[20:35:15] <Connor> okay, back from lunch.
[20:44:09] <mrsunshine_> gah, let it be morning so i can continue my case mod, get everything hooked up and test the new spindle drive =)
[20:45:54] -!-
WalterN [WalterN!~walter@tiwake.com] has joined #emc
[20:46:26] <Connor> pcw_home: Okay, Using PC817 with a 1N4004 Diode in series.. I need a voltage divider that can cut the current and voltage down so that the opto can handle it.. and a small cap in parallel for filtering..
[20:49:17] -!-
Emcrules_Laptop [Emcrules_Laptop!~Jean-Paul@CPE001310e6c94f-CM001bd71cb794.cpe.net.cable.rogers.com] has joined #emc
[20:51:31] <pcw_home> If you want zero crossing detection, a cap will add some phase shift
[20:52:14] <mrsunshine_> http://www.youtube.com/watch?v=gUw9XKjMfUg&feature=related that just cant be good for that poor stepper :P
[20:53:19] <Connor> mrsunshine_: Why ?
[20:53:42] <mrsunshine_> well, its mounted direcly on the axel of it ... milling .. it just cant be good :P
[20:53:53] <mrsunshine_> its not like its designed for it :P
[20:57:14] <Connor> pcw_home: Yea, I forgot about that..
[20:57:33] <pcw_home> with a series diode a 22K series resistor should be OK on the input side (and maybe a 4.7K pullup on the output side at 5V output so 20 % CTR would work)
[20:57:34] <pcw_home> if you really need accurate zero crossing, you will need to overdrive the CTR by quite a lot (use a high value pullup on the transistor side)
[20:58:13] <Connor> That was the plan.
[20:58:16] <pcw_home> so the opto switches as a low voltage (close to zero)
[20:58:24] <pcw_home> (at a)
[20:58:59] <Connor> What voltage will 22k and diode end up out putting to the opto ?
[20:59:54] <Connor> I have 1/4watt 22k's.. In fact.. I don't have much in the way of anything other than 1/4watt resistors..
[21:00:50] <Connor> The one in series is the one that needs to be the high wattage one.. That's the one that kept burning out..
[21:01:21] <Connor> or, would go into thermal runaway.. (as it got hotter, resistor would change value)
[21:05:49] <tom3p> for the pyvcp checkbox widget, was <initval> included in the stock distribution?
[21:10:36] -!-
paul11 [paul11!~paul11@c-98-237-170-144.hsd1.wa.comcast.net] has joined #emc
[21:16:03] -!-
Emcrules_Laptop has quit [Ping timeout: 246 seconds]
[21:17:28] <tom3p> is there a way to set an initial condition for a pyvcp checkbox?
[21:18:43] -!-
emcrules_mill has quit [Read error: Connection reset by peer]
[21:20:03] -!-
mhaberler [mhaberler!~mhaberler@extern-181.stiwoll.mah.priv.at] has joined #emc
[21:25:38] -!-
bill20r3 [bill20r3!~bill@2607:fa18:0:2:a800:4ff:fe00:a04] has joined #emc
[21:28:13] -!-
skunkworks_ has quit [Remote host closed the connection]
[21:31:14] -!-
e3m has quit [Ping timeout: 276 seconds]
[21:31:15] -!-
mk0 has quit []
[21:31:56] -!-
e3m [e3m!~IceChat7@217.96.27.167] has joined #emc
[21:35:47] -!-
emcrules_mill [emcrules_mill!~jp1@CPE001310e6c94f-CM001bd71cb794.cpe.net.cable.rogers.com] has joined #emc
[21:42:31] -!-
psha has quit [Quit: leaving]
[21:44:04] -!-
Poincare has quit [Ping timeout: 260 seconds]
[21:45:15] -!-
cradek has quit [Changing host]
[21:45:16] -!-
cradek [cradek!~chris@emc/board-of-directors/cradek] has joined #emc
[21:45:46] -!-
Poincare [Poincare!~jefffnode@y57.ampersant.be] has joined #emc
[21:50:53] -!-
pjm__ [pjm__!~pjm@host81-146-71-253.btremoteinternet-dsl.bt.net] has joined #emc
[21:54:54] -!-
Emcrules_Laptop [Emcrules_Laptop!~Jean-Paul@CPE001310e6c94f-CM001bd71cb794.cpe.net.cable.rogers.com] has joined #emc
[21:55:09] -!-
pjm has quit [Ping timeout: 276 seconds]
[21:55:37] -!-
e3m has quit [Quit: We be chillin - IceChat style]
[22:00:41] -!-
Emcrules_Laptop has quit [Ping timeout: 264 seconds]
[22:01:20] -!-
micges has quit [Read error: Operation timed out]
[22:01:39] -!-
Poincare has quit [Quit: changing servers]
[22:03:04] -!-
Poincare [Poincare!~jefffnode@y57.ampersant.be] has joined #emc
[22:04:03] -!-
ewidance [ewidance!~ewidance@montpellier.civade.com] has joined #emc
[22:04:11] -!-
Poincare has quit [Client Quit]
[22:04:34] -!-
Poincare [Poincare!~jefffnode@2001:5c0:110c:9004:230:48ff:fe86:1622] has joined #emc
[22:20:54] -!-
tlab [tlab!~tlab@c-69-243-187-136.hsd1.in.comcast.net] has joined #emc
[22:34:50] -!-
_Poincare [_Poincare!~jefffnode@2001:5c0:150f:1704:230:48ff:fe86:1622] has joined #emc
[22:35:12] -!-
Poincare has quit [Ping timeout: 272 seconds]
[22:35:36] _Poincare is now known as
Poincare
[22:53:07] -!-
fojobo2 [fojobo2!~bluntz@fl-71-52-215-56.dhcp.embarqhsd.net] has joined #emc
[22:53:08] -!-
Fox_Muldr has quit [Ping timeout: 276 seconds]
[22:53:19] -!-
fojobo2 [fojobo2!~bluntz@fl-71-52-215-56.dhcp.embarqhsd.net] has parted #emc
[22:54:16] -!-
Fox_Muldr [Fox_Muldr!quakeman@frnk-4d01c584.pool.mediaWays.net] has joined #emc
[22:54:27] -!-
fojobo2 [fojobo2!~bluntz@fl-71-52-215-56.dhcp.embarqhsd.net] has joined #emc
[22:55:01] -!-
fojobo2 has quit [Remote host closed the connection]
[22:57:55] <Connor> okay, so, I'm going to use a opto slot sensors for end stops. Is it better to have adjustment in the sensor, or the flags? Better to have 1 flag or two flags? Doesn't really matter in the scheme of things, or am I over thinking it ?
[23:00:30] -!-
odiug has quit [Ping timeout: 240 seconds]
[23:01:53] <bill20r3> you're over thinking. :-)
[23:02:15] <mrsunshine_> i like the one opto spring loaded end switch thing some uses
[23:02:24] <bill20r3> use some stiff brass for the flags, and mount them off to one side, with a bend. then you can bend the brass for adjustment.
[23:02:33] <Connor> I do that allot... So, Help me.. un-overthink it.. :)
[23:02:39] <mrsunshine_> as you can house it to protect it from shavings etc =)
[23:03:01] <bill20r3> or mount them on a pivot. like on my Z axis, in this picture:
http://protovision.com/wordpress/wp-content/uploads/P1040137.jpg
[23:03:34] <mrsunshine_> wth =)
[23:03:37] <mrsunshine_> frankenmill ? :P
[23:03:54] <bill20r3> totaly franken!
[23:03:57] <bill20r3> totally, too.
[23:04:15] <Connor> that's a repstrap if I've ever saw one..
[23:04:28] <bill20r3> yeah, sorry. I got distracted and lost track of channels.
[23:04:40] <bill20r3> for an actual Mill, I'd use something a bit more solid.
[23:04:46] <Connor> Oh, it's cool.. Mine double asthat too.
[23:04:58] <bill20r3> repstraps dont have much force to deal with, so you can do cheeze-o stuff like that.
[23:05:08] <Connor> this is a router.. I was thinking of using alum angle for the flags.
[23:05:28] <bill20r3> anything should work fine, as long as it's opaque and stays put.
[23:05:48] <bill20r3> I got a FireballV90 this month, that I need to put limit switches on.
[23:05:50] <Connor> trying to figure out how your Z on the pivot works..
[23:05:55] <bill20r3> they dont come with, which is dumb.
[23:06:21] <bill20r3> see the screw? it's off-axis from the opto, so I can pivot it un&down about 1/4" or so.
[23:06:21] <Tom_itx> what v output are those mesa boards? the general io ones with cplds on em
[23:06:25] <Tom_itx> 3v?
[23:07:10] <bill20r3> no idea.
[23:07:20] <bill20r3> the product name is "Anything IO", if you want to google.
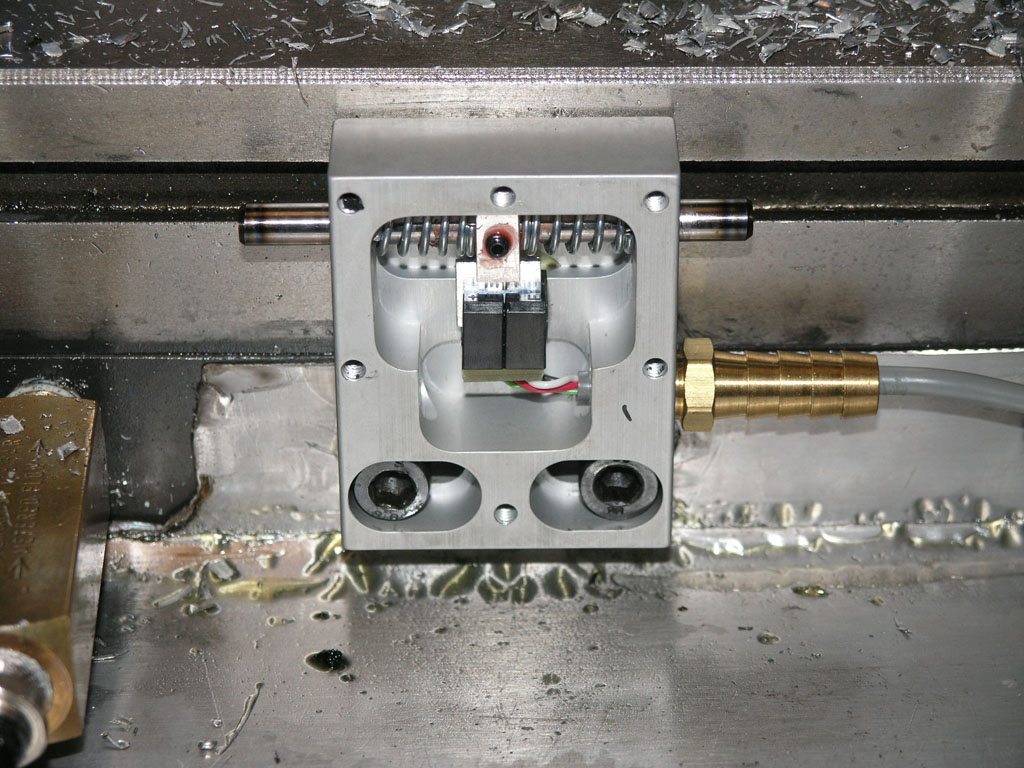
[23:07:41] <mrsunshine_> http://www.cnccookbook.com/img/MillStuff/CNC/Enclosure/HomeSwitch/P1011808.JPG
[23:07:41] <Tom_itx> well i don't know their product line that well
[23:07:47] <mrsunshine_> thats the design im talking about
[23:07:50] <mrsunshine_> its just brilliant =)
[23:08:09] <Tom_itx> what is it?
[23:08:14] <JT-Shop> Tom_itx: what ever voltage you feed them up to 24v
[23:08:20] <bill20r3> that is one fancy switch-holder.
[23:08:28] <mrsunshine_> its home and limit switch
[23:08:31] <Tom_itx> JT-Shop, on the opto side
[23:08:32] <mrsunshine_> spring loaded =)
[23:08:36] <Connor> Yea.. I saw that.. really nice..
[23:08:42] <bill20r3> so no flags..
[23:09:08] <Tom_itx> why not use microswitches?
[23:09:14] <mrsunshine_> just need something for the bars to hit =)
[23:09:20] <Connor> no flags... But you still need something to run into it..
[23:09:20] <Tom_itx> that's what alot of the big machines use
[23:09:42] <JT-Shop> that is how my CHCN is so the switch is protected from flying swarf
[23:09:46] <Connor> Micros, Optos, and Hall Effect sensors..
[23:10:17] <Connor> Some people say Optos are more accurate.. and don't like mechanical make/break switches..
[23:10:31] <Connor> others say optos are prone to dust, and light etc..
[23:10:56] <Tom_itx> my discussion of optos was about isolators
[23:11:12] <Tom_itx> not interruptors
[23:11:42] <Tom_itx> hall effect seem to be best in hazardous environments
[23:11:53] <Tom_itx> at least that's what the automotive industry feels
[23:11:58] <Connor> I was commenting on your... (06:09:07 PM) Tom_itx: why not use microswitches?
[23:12:36] <Connor> hall effect sensors can be affected by magnetic fields and stuff..
[23:12:43] <Tom_itx> yup
[23:12:47] <Connor> so, it really depends on the application and such.
[23:13:30] -!-
acemi has quit [Quit: WeeChat 0.3.2]
[23:13:46] <Tom_itx> i'd take that barb connector one more step and put a tiestrap on the cable inside the enclosure in case it got pulled
[23:15:04] <Connor> looks like to me, the back of it is open up to the mill..
[23:15:33] <Connor> I see some oil in behind the spring..
[23:16:23] <bill20r3> I like the barb. <3 overkill.
[23:16:39] <Tom_itx> so do i
[23:17:12] <Tom_itx> or use a ferrule like you see on ice maker supply lines on the cable
[23:17:36] <Tom_itx> 1/4"
[23:17:45] * bill20r3 always just uses a big knot.
[23:17:55] <bill20r3> <--- kludgeneer
[23:27:26] -!-
tlab has quit [Quit: Leaving]
[23:28:50] -!-
tlab [tlab!~tlab@c-69-243-187-136.hsd1.in.comcast.net] has joined #emc
[23:50:08] -!-
skunkworks [skunkworks!~skunkwork@str-bb-cable-south2-static-6-412.dsl.airstreamcomm.net] has joined #emc
[23:50:09] -!-
ewidance has quit [Quit: ewidance]
[23:54:41] -!-
Emcrules_Laptop [Emcrules_Laptop!~Jean-Paul@CPE001310e6c94f-CM001bd71cb794.cpe.net.cable.rogers.com] has joined #emc
[23:59:20] -!-
mhaberler has quit [Quit: mhaberler]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}