Back
[00:04:12] -!-
theorb [theorb!~theorb@91.84.53.6] has joined #emc
[00:04:14] -!-
theorbtwo has quit [Ping timeout: 240 seconds]
[00:04:26] theorb is now known as
theorbtwo
[00:06:11] <Valen> http://www.cnczone.com/forums/general_metal_working_machines/118358-phenolic_basalt_head_our_hm45.html making a new head for our HM45 type mill
[00:12:38] -!-
micges has quit [Quit: Ex-Chat]
[00:21:05] <andypugh> Interesting, and inventive.
[00:21:55] <andypugh> Though, in general terms, I am not clear why the stone/polymer solutions are so popular when cast iron is so cheap.
[00:24:55] <andypugh> Though I guess "not having a machine to machine the casting with" is one good reason.
[00:41:29] -!-
Dallur has quit [Quit: Leaving.]
[00:53:03] -!-
EDocToor has quit [Quit: ChatZilla 0.9.86 [Firefox 3.6.13/20101203075014]]
[01:08:43] <Valen> cast iron has issues
[01:09:01] <Valen> it doesn't deaden vibration as well
[01:09:18] <Valen> you need to "rest" the casting for 6 months before you can do anything with it
[01:09:51] <Valen> and its substantially more expensive than polymers
[01:12:59] -!-
emcrules_laptop [emcrules_laptop!~emcrules_@CPE001310e6c94f-CM001bd71cb794.cpe.net.cable.rogers.com] has joined #emc
[01:21:37] mndlbld is now known as
mendelbuilder
[01:29:11] -!-
PCW has quit [Remote host closed the connection]
[01:36:25] -!-
robh__ has quit [Ping timeout: 240 seconds]
[01:37:04] <mendelbuilder> im looking for a list of supported controllers
[01:39:57] -!-
mendelbuilder has quit []
[01:40:02] -!-
mendelbuilder [mendelbuilder!~mndl@77-95-78-113.bb.cust.hknett.no] has joined #emc
[01:43:31] <andypugh> mendelbuilder: There is a supported hardware list, but with EMC2 it is more a question of supported protocols
[01:44:09] <mendelbuilder> andypugh: aha, well i got this Multicam CNC router, wonder if its possible
[01:44:18] <mendelbuilder> im fedup with windows stuff
[01:44:46] <andypugh> How do you communicate with it at the moment?
[01:44:56] <mendelbuilder> WinDNC 95/98
[01:45:24] <mendelbuilder> had to use VMWare with win98 :P
[01:45:32] <andypugh> I mean physically, where does it plug in?
[01:45:35] <mendelbuilder> RS232
[01:45:52] <andypugh> Hmm.
[01:46:28] <mendelbuilder> Extratech controller G760
[01:47:44] <mendelbuilder> its from like 1997
[01:47:44] <andypugh> So, windows sends _what_ to the controller?
[01:48:01] <mendelbuilder> well its a DNC software on windows feeding the controller
[01:48:21] <mendelbuilder> hpgl and gcode
[01:49:14] <mendelbuilder> ucito or something is the native language
[01:49:25] <mendelbuilder> not sure if its translated in the dnc software or the controller
[01:49:31] <mendelbuilder> not much docs on it
[01:50:14] <mendelbuilder> its working great atm, but i hate being forced to use the vintage software
[01:50:49] <andypugh> Yeah, well, EMC2 would be a stupid way to feed G-code to anything.
[01:51:23] <mendelbuilder> it can also be connected directly to design software if it has drivers
[01:51:38] <mendelbuilder> but its like 5000 USD :P
[01:51:42] <elmo40> :P so the multicam router is the controller. kinda like a fanuc controller. Can you edit code on it? or is there no actual display?
[01:51:43] <mendelbuilder> probably wont buy
[01:52:04] -!-
tlab [tlab!~tlab@c-69-243-187-136.hsd1.in.comcast.net] has joined #emc
[01:52:20] <mendelbuilder> well i have a big cabinet with inverter, servo drivers and controller and a separate pendant with display
[01:52:30] <mendelbuilder> pendant can take input also direct
[01:52:41] <andypugh> EMC2 would want to replace pretty much all the logic, up to the power drivers.
[01:53:09] <mendelbuilder> hmm i was going to build my own, but this thing became avaiable and I jumped on it
[01:53:40] <mendelbuilder> well im still going to build my own got almost all the parts
[01:53:48] <andypugh> If I was converting then EMC2 would replace the controller.
[01:54:00] <mendelbuilder> hmm wow
[01:55:06] <andypugh> Do you know what the interface is between the controller and the drives?
[01:55:06] <mendelbuilder> hmm no not sure
[01:55:11] <mendelbuilder> all i know is that it has a G760 controller (intel)
[01:55:21] <mendelbuilder> and well yeah
[01:55:27] <mendelbuilder> a M23 extratech interface board
[01:56:57] <andypugh> There might be an argument for replacing everything up to the servos with modern (and, more importantly) documented stuff.
[01:57:20] <mendelbuilder> yeah seems like that is the thing to do
[01:57:33] <mendelbuilder> probably will need to run as is to cover the costs of retrofit ;)
[01:58:27] <mendelbuilder> mechanics is rock solid made from 1/2 inch steel
[01:58:40] <mendelbuilder> but i dont like being forced to use a spesific software
[01:59:07] <andypugh> Yeah, reading the stuff I just found on the interweb the existing software looks horrible
[01:59:14] <mendelbuilder> very
[01:59:27] <mendelbuilder> 16 bits :P
[01:59:41] <mendelbuilder> but vmware does a hell of a job
[02:00:00] <mendelbuilder> running win7 with vmvare and windows 98 image *lol*
[02:02:01] <mendelbuilder> but anyways i am going to build a router myself, it has the TB650 or something like that
[02:02:26] <mendelbuilder> was promised it would be able to run emc and mach3
[02:02:39] <andypugh> Oh, yeah, that's easy
[02:02:56] <mendelbuilder> got some nema 23's and powersupply with it
[02:03:00] <andypugh> But the multicam sounds like fun.
[02:03:22] <mendelbuilder> i will cut the parts for the DIY router with it :)
[02:03:32] <mendelbuilder> i wonder if i overpaid
[02:03:48] <mendelbuilder> got it for like 2000 �
[02:03:56] <mendelbuilder> its an MT22
[02:04:01] <mendelbuilder> with 24x24"
[02:04:26] <mendelbuilder> but it has vaccumpump and 2 spindles
[02:04:29] <andypugh> This isn't you is it?
http://www.cnczone.com/forums/commercial_cnc_wood_routers/113209-multicam_mt22.html
[02:04:34] <mendelbuilder> yeah
[02:04:41] <mendelbuilder> been struggelin a LOT
[02:06:48] <andypugh> Let me read that.
[02:06:58] <mendelbuilder> multicam support is like non existing
[02:07:18] <mendelbuilder> all they want is $$$$$
[02:11:02] <andypugh> Hmm.
[02:11:25] <andypugh> I know what _I_ would do, but I am not sure I could afford to do it.
[02:11:37] <mendelbuilder> tell ?
[02:12:16] <andypugh> I would replace everything up to the motor power terminals with stuff I understood, could see the code for, and had the manuals for.
[02:13:40] <mendelbuilder> yeah
[02:13:56] <mendelbuilder> probably will happen as soon as i get some cash in
[02:13:57] <andypugh> What are the motors?
[02:14:20] <mendelbuilder> hmm thats also unknown, multicam removed stickers from them
[02:14:26] <mendelbuilder> but i know they are servos
[02:14:32] <mendelbuilder> heavy duty servos
[02:14:42] <andypugh> DC? Brushless? Any pictures?
[02:14:51] <andypugh> Spindle power?
[02:15:03] <mendelbuilder> spindle is Perske
[02:15:06] <mendelbuilder> german
[02:15:10] <mendelbuilder> and there is an inverter
[02:15:15] <mendelbuilder> 400hz
[02:16:08] <andypugh> That should interface direct to emc2 then, you could even do that with a parport, resistor and capacitor (though better solutions exist)
[02:16:42] <andypugh> So, spindle is fine, no need to spend money there.
[02:16:52] <mendelbuilder> yeah seems very good a is
[02:17:02] <mendelbuilder> didnt find pic of the servo motors
[02:17:06] <mendelbuilder> but they are pretty big
[02:17:09] <andypugh> If you can work out what the servos are then I could guess what a full replacement would cost.
[02:17:50] <mendelbuilder> did you see the pics in the forum ?
[02:17:57] <mendelbuilder> 2 attachments there
[02:19:22] <mendelbuilder> http://www.cnczone.com/forums/attachment.php?attachmentid=123069&d=1294163945
[02:19:28] <mendelbuilder> thats the controller cabinet
[02:20:32] <andypugh> http://www.youtube.com/watch?v=Zy8gpPYKF3o
[02:20:41] <andypugh> That sounds like steppers to me..
[02:21:03] <mendelbuilder> hmm i was told it had servos, and it doesent sound like steppers
[02:21:54] <mendelbuilder> that one is a later model than mine
[02:22:00] <mendelbuilder> not sure what they use now
[02:23:07] <mendelbuilder> hmm
[02:23:11] <mendelbuilder> maybe
[02:23:13] <mendelbuilder> after all
[02:23:21] <andypugh> Do you have that control console?
[02:23:37] <andypugh> Interfacing that to EMC2 would be fun.
[02:24:06] <mendelbuilder> i have that console but diffrent model
[02:24:19] <mendelbuilder> less buttons
[02:24:22] <andypugh> Not impossible, because EMC2 is Open source so _anything_ is possible.
[02:24:27] <mendelbuilder> true
[02:24:35] <andypugh> But few things are _easy_
[02:24:41] <mendelbuilder> but i am starting to belive it might be steppers
[02:24:46] <mendelbuilder> after al
[02:24:53] <mendelbuilder> user manual says stepper
[02:25:12] <mendelbuilder> i got too much bad info when i bought this
[02:25:19] <mendelbuilder> was also told it has ballscrews
[02:25:22] <mendelbuilder> thats bullshit
[02:25:27] <andypugh> Belts?
[02:25:36] <mendelbuilder> belts on X
[02:25:54] <emcrules_laptop> andypugh: what are you using for a poewr supply on the 8i20?
[02:26:04] <mendelbuilder> or "belt"
[02:26:06] <mendelbuilder> only one
[02:27:35] <andypugh> emcrules_laptop: You don't want to know. Put it this way, if there was anyone, or anything, in the house but me it would be different. It's an ancient universal transformer, a rectifier and a capacitor. Death is only ten feet away.
[02:27:56] <emcrules_laptop> NIce i thought so
[02:28:19] <emcrules_laptop> So if i want to use 230V servos?
[02:28:19] <andypugh> It's all you need, but more insulation would be wiser.
[02:28:33] <andypugh> What's your local mains voltage?
[02:28:46] <emcrules_laptop> 230V
[02:29:19] <andypugh> In that case, you need a rectifier and a few uF of 400V capacitors.
[02:29:48] <emcrules_laptop> What max dc bus allowable?
[02:29:52] <andypugh> No need for anything regulated or clever.
[02:30:29] <andypugh> 400V is max for the 8i20
[02:31:17] <andypugh> mendelbuilder: Is the machine near to you at the moment?
[02:31:30] <emcrules_laptop> Andy: What about braking?
[02:32:48] <andypugh> I am not sure. It will drive a mechanical brake, but I don't know what it does to dump current.
[02:33:08] <andypugh> perhaps pcw_home knows?
[02:34:31] <emcrules_laptop> I wonder if he is around?
[02:34:35] <andypugh> Ah, wait, I have been misunderstanding the connections. It has two terminals for a brake _resistor_ to dump power
[02:35:29] <emcrules_laptop> Ah Ok that makes sense.
[02:37:25] <andypugh> 230V and 15A brake current, sounds like a 3kW kettle element to me. Or perhaps a set of electric fire elements.
[02:38:25] <andypugh> Though you could probably use something much smaller if you are not stopping several tons from several kph
[02:39:28] <emcrules_laptop> Ya so i can use standard braking resistor sized to anticipated power disapation
[02:40:01] <andypugh> Indeed. Or something cheaper that makes you a cup of tea as a sideline
[02:40:08] <emcrules_laptop> LOL
[02:40:39] <emcrules_laptop> Im thinking of trying them out on a large router
[02:42:15] <andypugh> mendelbuilder: How many wires go to each motor (and what sizes are they?)
[02:43:18] <andypugh> emcrules_laptop: what sort of servos are they? What sort of feedback?
[02:43:59] <emcrules_laptop> allen bradley incremental feedback MPL-A230's
[02:44:19] <emcrules_laptop> .8kw motors
[02:45:22] <mendelbuilder> andypugh: i need to have a closer look on that but they are about twice a nema23 in size wires havent checked yet
[02:47:15] <mendelbuilder> but i need some sleep will do some more checks tomorrow :)
[02:49:23] <andypugh> I will almost certainly be here tomorrow night, and if not, somebody else equally, or more, knoweldgable will be.
[02:49:47] <andypugh> You might even find someone who can spell "knowledgeable"
[02:49:54] <mendelbuilder> lol ;)
[02:50:14] <mendelbuilder> kunnskapsrik ;)
[02:50:25] <andypugh> Where in Sweden?
[02:50:56] <pcw_home> Yes, the 8I20 has a brake resistor drive IGBT with programmable on and off thresholds (default on at 360V off at 340V)
[02:51:01] <mendelbuilder> actually its norway reg process was wrong
[02:51:12] <emcrules_laptop> Hey peter
[02:51:18] <andypugh> Not that it matters, but I once spent 2 weeks in Jokkmok. That was long enough.
[02:51:28] <mendelbuilder> lol
[02:51:37] <mendelbuilder> jokkmokk sounds like very northern
[02:51:46] <andypugh> Yes. Very.
[02:51:54] <pcw_home> Hey emcrules_laptop
[02:52:08] <mendelbuilder> omgh well lets say 200 miles
[02:52:13] <mendelbuilder> from jokkmokk
[02:52:15] <emcrules_laptop> pcw: on another note is it possible to get cad layouts of mesa board for electrical drawings?
[02:52:15] <mendelbuilder> i belive
[02:52:18] <mendelbuilder> south
[02:52:43] <mendelbuilder> andypugh: what did you do there ?
[02:52:59] <mendelbuilder> andypugh: operation sami freedom or something ? ;)
[02:53:42] <pcw_home> Like DXF?
[02:54:34] <emcrules_> pcw: yes just need outside board dims and mounting hole placements
[02:55:37] <andypugh> mendelbuilder: Testing cars in the cold (it was january)
[02:55:43] <pcw_home> OK I have a Gerber to DXF script for that (no 3d or anything)
[02:55:45] <pcw_home> probably best to remand me by email what you want
[02:55:47] <mendelbuilder> andypugh: oh :D nice what cars ? :)
[02:55:49] -!-
tlab has quit [Quit: Leaving]
[02:55:56] <pcw_home> (remind)
[02:56:01] <andypugh> mendelbuilder: Fords
[02:56:07] <mendelbuilder> US fords ?
[02:56:13] <mendelbuilder> or euro fords
[02:56:27] <andypugh> Euro.
[02:56:30] <emcrules_> pcw: will do. Thanks!
[02:56:35] <mendelbuilder> cool :)
[02:56:37] <andypugh> Though the distinction is blurring
[02:56:53] <andypugh> But that trip was Mondeo / S-Max
[02:57:35] <andypugh> So, these servos, do they have Hall sensors?
[02:57:54] <mendelbuilder> hall sensors, not familiar with those
[02:58:16] <mendelbuilder> but the machine has red lights in it doing something probably endstops
[02:58:22] -!-
ries has quit [Quit: ries]
[02:58:58] * mendelbuilder just loves well documented cnc machines *rofl*
[02:59:25] <andypugh> Well, a brushless servo motor with an incremental encoder needs _something_ to tell it where the rotor is so it can start
[03:00:21] <andypugh> Normally three hall sensors, but there are other possibilities
[03:00:58] <mendelbuilder> i will do more research on that tomorrow, count wires doing measurements
[03:01:32] <mendelbuilder> reprap was better i knew what i bought :P
[03:01:53] <mendelbuilder> results sucked but still
[03:02:03] <pcw_home> From what I've read linear motors often don't have Halls so are forced to do thump start
[03:03:10] <mendelbuilder> i wish i could identify the motors, but there arent ANY numbers on them ;( seems like stickers have been removed by the "friendly" multicam people
[03:03:32] <mendelbuilder> the controllers probably have numbers i can check
[03:04:07] <mendelbuilder> eh drivers
[03:05:24] <andypugh> Ah, sorry, I got folks confused.
[03:05:41] <emcrules_laptop> Andy were you talking to me?
[03:05:45] <pcw_home> If the drivers take step+dir signals, it should be a fairly easy/reversable EMC retrofit
[03:06:14] <andypugh> Yes, the Hall sensor question was for emcrules_laptop
[03:06:56] <emcrules_laptop> No hall sensors as far as i know thats what i thought the BLDC function is for?
[03:07:08] <emcrules_laptop> One sec i will check
[03:07:46] <andypugh> Yeah, mendelbuilder. In the cheapest scenario you can replace the entire electronics except the power drivers with EMC2 and a parallel port.
[03:09:09] -!-
encryptio has quit [Remote host closed the connection]
[03:09:26] -!-
encryptio [encryptio!~ckastorff@adsl-074-170-091-222.sip.mem.bellsouth.net] has joined #emc
[03:10:25] <emcrules_laptop> Andy: No hall signals. The Allen bradley drive that this motor is paired with does not require them as well.
[03:10:56] <andypugh> Hmm, any idea what the S1 S2 S3 pins are then?
[03:11:46] <andypugh> What's the complete part number of the motor>
[03:11:54] <emcrules_laptop> Sorry my bad i was looking at the absolute encoder connections.
[03:12:13] <emcrules_laptop> Halls are S1 S2 and S3
[03:12:39] <andypugh> mendelbuilder: Not a definitive test, but are the motor cases extruded aluminium or laminated steel?
[03:12:45] <mendelbuilder> andypugh: well i hope doing so in the end
[03:12:49] <mendelbuilder> gotta sleep now
[03:12:56] <mendelbuilder> cya later :)
[03:13:05] <andypugh> See you
[03:13:36] <andypugh> emcrules_laptop: Easy then. 8i20 sounds ideal for the job
[03:16:36] <emcrules_laptop> Well I think i just might try it then. I also thought I could use a AC servo with any incremental encoder and then use BLDC to creat hall signal or did I read thet wrong?
[03:18:34] <andypugh> Yes, the bldc component can create a hall signal, but it is a bit more work to set up.
[03:20:20] <andypugh> You can thump-align the motor or use the encoder index to get a reference, and the bldc.comp will take it from there.
[03:21:06] <andypugh> pcw_home: Did you see that I think we can run the Fanuc Red-Caps with an 8i20 now? I don't suppose you have one to test with?
[03:21:09] <emcrules_laptop> So it's adviseable to use motor manufactures standard encoder. The reason i say this is due to the fact that i also have some MPL's with absolute encoders that are of obvious no use.
[03:21:32] <emcrules_laptop> And I think i have a RED cap
[03:21:48] <pcw_home> What type of absolute encoder?
[03:21:54] <emcrules_laptop> Serial
[03:21:59] <andypugh> emcrules_laptop: It's up to you, but I am not sure how one would interface the absolute encoders to EMC2
[03:22:32] <emcrules_laptop> I thought there was no option for absolute interfacing?
[03:23:04] <pcw_home> SSI? Yasakaw?
[03:23:24] <emcrules_laptop> SSI i think the encoders are sick steggmann
[03:23:26] <pcw_home> (Yaskawa)
[03:23:58] <pcw_home> Theres SSI firmware in Hostmot2
[03:24:11] <emcrules_laptop> Your kidding me!!!!
[03:25:05] <emcrules_laptop> How would i go about to tru this out?
[03:25:42] <pcw_home> But no driver support or EMC support for absolute encoders though it would be nice (I plan to add BISS to the firmware as as well)
[03:27:38] <emcrules_> Ah crap
[03:28:17] <andypugh> SSI support for EMC2 is on the list.
[03:28:29] <pcw_home> I guess it would be pretty easy to write a comp that took the absolute encoder data and faked the canonical incremental encoder
[03:28:41] <emcrules_> ok i take away the crap comment
[03:29:36] <pcw_home> SSI is really simple, just a shift register really
[03:29:40] <emcrules_> i dont really need absolute just would like to use the motor e the encoders are a pain in the ass to remove
[03:29:48] <andypugh> Bit-bashing it shouldn't be too hard, or for a _specific_ encoder you could probably do it with the raw interface if there was SSI in the firmware
[03:30:27] <andypugh> What encoders are on the motor now?
[03:30:52] <emcrules_> i have one motor with incremental but three with absolute
[03:31:28] <andypugh> Do the absolute ones have Hall sensors? (I assume not)
[03:31:53] <emcrules_> no i do not think so
[03:32:14] <pcw_home> Actually if there was a more flexible raw mode, all the funny hardware could be at run with hardware specific comps (at least until real driver support)
[03:32:16] <andypugh> So you do need a way to get that SSI into EMC2
[03:32:47] <pcw_home> You can try one axis with raw-mode
[03:32:57] <emcrules_> yes that would be nice
[03:33:13] <pcw_home> I can whip up a bitfile if you really want to peak/poke
[03:34:01] <andypugh> I think you only get one read/write per servo cycle in the current raw mode, which is no problem for one channel, but a limit for more.
[03:34:02] <emcrules_laptop> sure it would be nice to see if it could work
[03:35:17] <andypugh> But one channel should be as simple as setting the read_address pin to the right address on the Mesa card, and watching the data on the output pin.
[03:35:51] <pcw_home> Yes at the risk of getting a little too Mickey Mouse you could expand raw-read/raw-write to have address lists
[03:36:28] -!-
qq- has quit [Ping timeout: 265 seconds]
[03:36:55] <emcrules_laptop> Definition of raw read please? sorry no totally up on the internals of emc
[03:37:12] <pcw_home> For the SSI you need to write a start command and wait for the data ready then read the data
[03:38:22] <pcw_home> its an option in the HostMot2 driver that allows direct (address based) register access to the HostMot2 hardware
[03:38:39] <andypugh> emcrules_laptop: Raw mode is semi-described here:
http://linuxcnc.org/docs/html/man/man9/hostmot2.9.html�
[03:39:47] <emcrules_laptop> Ok i understand
[03:41:17] <andypugh> The SSI registers live at 6800h, 6804h, 6808h and 6810h in the FPGA registers.
[03:45:12] <andypugh> So if you set the read_address and write_address pin to 6800 and connect a hal "constant" to the write strobe, the read_data pin will carry the encoder value. In theory.
[03:46:18] <emcrules_laptop> By constant you mean "1"
[03:48:28] <pcw_home> For the SSI interface write data that starts transfer is "dont care"
[03:49:03] <andypugh> emcrules_laptop: Not really, no. if you setp the pin to 1 in the HAL file it won't get re-written (the strobe pin self-resets). If you create a HAL constant (which is actually a function) then it will re-write the strobe pin to 1 every servo cycle.
[03:50:04] <andypugh> You need something to prompt the raw inteface to actually write data to the register.
[03:50:14] <pcw_home> Oh misunderstood, thats HAL stuff I was just thinking of the hardewre
[03:50:25] <pcw_home> bbl movie time
[03:50:32] <andypugh> Is SSI purely read-only?
[03:50:57] <emcrules_laptop> Ah ok. Thanks peter. Andy yes I think so.
[03:51:11] <pcw_home> Yes except the write to start the cycle (and setup the bit-length)
[03:51:52] <andypugh> Hmm, seems like a blindingly simple driver to write.
[03:51:52] <pcw_home> SSI has a clock out and data returned (only 2 signals though usually differential)
[03:52:07] <pcw_home> really bbl
[03:52:08] <emcrules_laptop> I would still need 6 pins to connect the encoder as well right? sin+ sin - cos + cos - data + and data -
[03:52:54] <andypugh> Hmm, is that SSI?
[03:53:01] <emcrules_laptop> http://www.stegmann.com/product/absolute/absolute.html ssi info
[03:53:39] <emcrules_laptop> first article link
[03:54:27] <andypugh> sin+ sin- cos + cos - sounds like a resolver to me, which is totally different again
[03:54:40] <emcrules_laptop> no SSI encoder
[03:54:57] <emcrules_laptop> i know what your thinking but its an encoder
[03:55:42] <pcw_home> SSI should only have +-data and +-clock
[03:57:34] <andypugh> I am liking the idea of a server somewhere where you can select how many of which functions you want, and it compiles you a suitable firmware and emails it to you. :-)
[03:57:42] <emcrules_laptop> http://samplecode.rockwellautomation.com/idc/groups/literature/documents/in/mp-in001_-en-p.pdf page 16
[03:57:52] <emcrules_laptop> LOL sounds cool
[03:59:29] <andypugh> emcrules_laptop: I saw that page, it makes no sense at all.
[04:02:57] <emcrules_laptop> I know im confused now. I know its a sick stegmann encoder but now im thinking it might be a hiperface encoder. Other stegman ssi encoders on thier website show the clock and data lines with no sign cosign lines
[04:04:23] <andypugh> The absolute encoder versions of the motor have no Hall sensors, so you would need to bump-align them (or use encoder index) if you did swap the absolute encoders to incremental
[04:05:47] <emcrules_laptop> Shit they are hiperface interface
[04:06:47] <andypugh> Any idea how that works?
[04:08:17] <emcrules_laptop> checking on it now
[04:08:29] <emcrules_laptop> http://www.stegmann.com/product/servo/index.html
[04:09:53] <andypugh> This looks more useful:
http://www.sick-automation.ru/images/File/pdf/Hyperface_e.pdf
[04:10:40] <emcrules_laptop> oh it was english half way through
[04:12:48] <emcrules_laptop> So i wonder if i can use a resolver to ttl converter?
[04:14:40] <andypugh> If I read it right, not easily, as it is something like 16 sin-cos cycles per rev.
[04:15:07] <andypugh> So you need the RS485 to say which sector, and the sin/cos to say exactly where you are.
[04:17:42] <emcrules_laptop> 1024 per turn
[04:18:59] <andypugh> Really? In that case you can probably use a comaparator to square them up and pretend they are a quadrature signal :)
[04:19:31] <cradek> I was really tempted to do that with the resolver on my spindle
[04:20:18] <emcrules_laptop> true that would be easy
[04:21:05] <andypugh> Get a scope on it and check, but if so it looks fairly easy.
[04:22:17] <andypugh> Whether you would want to use the serial channel to get a staring position is an interesting question, but you could do that in something non-realtime.
[04:23:44] <emcrules_laptop> Will do it is nice to now that i might be able to use SSI as well. i know where i can get my hands on some ssi linear encoders for things like table travel and stuff
[04:24:42] <emcrules_laptop> trying to make a rotary encoder into a linar encoder right now for my BP knee
[04:28:10] <andypugh> wrap some steel braided wire round the shaft once, then anchor it at each end of the table?
[04:28:45] <andypugh> Anyway, stupidly late here.
[04:28:48] <andypugh> Night all
[04:29:00] <emcrules_> thanks. later
[04:29:11] -!-
andypugh has quit [Quit: andypugh]
[04:48:29] -!-
Valen has quit [Quit: Leaving.]
[05:13:06] -!-
emcrules_laptop has quit [Quit: Visitor from www.linuxcnc.org]
[05:29:38] -!-
LawrenceG has quit [Remote host closed the connection]
[05:37:35] -!-
mozmck has quit [Quit: Leaving.]
[06:17:46] -!-
dgarr has quit [Ping timeout: 246 seconds]
[06:43:42] -!-
nullie [nullie!~nullie@nullie.telenet.ru] has joined #emc
[07:00:58] -!-
toastyde1th has quit [Ping timeout: 240 seconds]
[07:04:46] -!-
toastydeath [toastydeath!~toast@c-69-140-223-139.hsd1.md.comcast.net] has joined #emc
[07:26:40] <DaViruz> wow, heidenhain has pretty good legacy documentation for their old cnc controllers
[07:27:37] <DaViruz> and easily accessible too
[07:27:47] <DaViruz> thumbs up to them
[07:44:02] -!-
nullie has quit [Ping timeout: 255 seconds]
[07:56:35] -!-
psha [psha!~psha@213.208.162.69] has joined #emc
[07:56:41] -!-
nullie [nullie!~nullie@v10-159-79.yandex.net] has joined #emc
[08:30:29] -!-
Valen [Valen!~Valen@ppp226-148.static.internode.on.net] has joined #emc
[09:33:40] -!-
nullie has quit [Quit: Ex-Chat]
[09:50:01] -!-
EDocToor has quit [Read error: Operation timed out]
[10:06:23] -!-
micges [micges!~micges@adfa45.neoplus.adsl.tpnet.pl] has joined #emc
[10:14:10] -!-
wobblybootie [wobblybootie!5c11c5d0@gateway/web/freenode/ip.92.17.197.208] has joined #emc
[10:18:10] -!-
robh__ [robh__!~robert@5ace70af.bb.sky.com] has joined #emc
[10:22:36] -!-
Dallur [Dallur!~root@157.157.81.3] has joined #emc
[10:25:17] -!-
nullie [nullie!~nullie@nullie.telenet.ru] has joined #emc
[10:30:46] -!-
Splith [Splith!~Farge@94.100.30.140] has joined #emc
[11:01:30] -!-
psha has quit [Quit: Lost terminal]
[11:01:55] -!-
ISSSY has quit [Quit: Visitor from www.linuxcnc.org]
[11:09:19] -!-
psha [psha!~psha@213.208.162.69] has joined #emc
[11:29:41] -!-
rooks has quit [Quit: So long, and thanks for all the fish.]
[11:36:54] -!-
micges has quit [Ping timeout: 265 seconds]
[11:50:22] -!-
micges [micges!~micges@adfa45.neoplus.adsl.tpnet.pl] has joined #emc
[11:52:28] -!-
psha has quit [Quit: leaving]
[12:17:23] -!-
ries [ries!~ries@200.125.129.54] has joined #emc
[12:17:54] -!-
micges has quit [Ping timeout: 260 seconds]
[12:40:40] -!-
rooks [rooks!~rooks@102-bem-18.acn.waw.pl] has joined #emc
[12:44:50] -!-
micges [micges!~micges@adfa45.neoplus.adsl.tpnet.pl] has joined #emc
[12:46:00] -!-
psha [psha!~psha@213.208.162.69] has joined #emc
[12:46:48] -!-
Valen has quit [Quit: Leaving.]
[12:52:13] -!-
micges has quit [Ping timeout: 246 seconds]
[12:52:48] -!-
Dallur has quit [Quit: Leaving.]
[12:58:51] -!-
qq- [qq-!~Moldovean@178-211-232-101.dhcp.voenergies.net] has joined #emc
[12:58:51] -!-
qq- has quit [Changing host]
[12:58:51] -!-
qq- [qq-!~Moldovean@unaffiliated/qq-] has joined #emc
[13:02:13] -!-
Poincare has quit [Ping timeout: 276 seconds]
[13:04:18] -!-
Poincare [Poincare!~jefffnode@213.219.184.23.wls.msr03bkc3.adsl.static.edpnet.net] has joined #emc
[13:14:42] -!-
JT-D510 [JT-D510!~chatzilla@216-41-143-50.semo.net] has joined #emc
[13:16:22] -!-
ries has quit [Quit: ries]
[13:18:35] -!-
JT-D510 has quit [Client Quit]
[13:18:45] -!-
micges [micges!~micges@adfa45.neoplus.adsl.tpnet.pl] has joined #emc
[13:18:57] -!-
micges has quit [Client Quit]
[13:25:15] -!-
mendelbuilder has quit [Ping timeout: 272 seconds]
[13:45:59] -!-
nullie has quit [Ping timeout: 260 seconds]
[13:50:18] -!-
awallin_ [awallin_!~quassel@2001:708:110:1020:224:7eff:feda:7c7d] has joined #emc
[13:59:03] -!-
nullie [nullie!~nullie@v10-159-79.yandex.net] has joined #emc
[14:42:49] -!-
EDocToor has quit [Quit: ChatZilla 0.9.86 [Firefox 3.6.13/20101203075014]]
[14:51:36] -!-
dgarr [dgarr!~dgarrett@adsl-75-61-65-2.dsl.pltn13.sbcglobal.net] has joined #emc
[14:53:08] -!-
mozmck [mozmck!~moses@client-173.225.233.241.dfwtx.partnershipbroadband.com] has joined #emc
[15:26:45] -!-
Techrat [Techrat!~TRat@unaffiliated/techrat] has joined #emc
[15:26:45] -!-
psha has quit [Read error: Connection reset by peer]
[15:27:00] -!-
psha [psha!~psha@213.208.162.69] has joined #emc
[15:30:19] -!-
andrus [andrus!~quassel@81.21.243.34] has joined #emc
[15:37:33] -!-
psha has quit [Quit: Lost terminal]
[15:51:00] -!-
psha [psha!~psha@213.208.162.69] has joined #emc
[15:51:23] -!-
qq- has quit [Read error: Connection reset by peer]
[15:55:50] -!-
nullie has quit [Quit: Ex-Chat]
[15:56:22] -!-
nullie [nullie!~nullie@v10-159-79.yandex.net] has joined #emc
[16:00:38] -!-
TonnyG [TonnyG!~tyfyu@125.164.143.71] has joined #emc
[16:00:58] -!-
SWPLinux has quit [Ping timeout: 240 seconds]
[16:06:57] -!-
qq- [qq-!~Moldovean@unaffiliated/qq-] has joined #emc
[16:09:46] -!-
Dallur [Dallur!~root@157.157.81.3] has joined #emc
[16:18:40] -!-
nullie has quit [Quit: Ex-Chat]
[16:18:47] -!-
skunkworks [skunkworks!~chatzilla@98-125-96-223.dyn.centurytel.net] has joined #emc
[16:19:06] -!-
nullie [nullie!~nullie@v10-159-79.yandex.net] has joined #emc
[16:23:34] -!-
TonnyG has quit [Ping timeout: 276 seconds]
[16:29:59] -!-
Splith [Splith!~Farge@94.100.30.140] has parted #emc
[16:32:51] -!-
nullie has quit [Quit: Ex-Chat]
[16:39:49] -!-
nullie [nullie!~nullie@nullie.telenet.ru] has joined #emc
[16:45:40] -!-
EDocToor has quit [Ping timeout: 276 seconds]
[16:45:42] EDocToor_ is now known as
EDocToor
[16:48:38] -!-
TonnyG [TonnyG!~tyfyu@125.164.148.228] has joined #emc
[16:54:37] -!-
nullie has quit [Quit: Ex-Chat]
[16:54:52] -!-
qq- has quit [Ping timeout: 240 seconds]
[17:02:38] -!-
TonnyG has quit [Ping timeout: 260 seconds]
[17:02:46] -!-
mendelbuild [mendelbuild!~mndl@77-95-78-113.bb.cust.hknett.no] has joined #emc
[17:17:38] -!-
qq- [qq-!~Moldovean@unaffiliated/qq-] has joined #emc
[17:22:28] -!-
foxdung [foxdung!~IceChat77@ip-206-124-216-130.static.eatel.net] has joined #emc
[17:32:11] -!-
Athlocatle [Athlocatle!~vip0@cc27x197.sels.ru] has joined #emc
[17:32:48] -!-
seb_kuzminsky [seb_kuzminsky!~seb@97-118-161-152.hlrn.qwest.net] has joined #emc
[17:33:30] -!-
awallin_ has quit [Remote host closed the connection]
[17:46:25] -!-
andypugh [andypugh!~andy2@cpc2-basl1-0-0-cust1037.basl.cable.virginmedia.com] has joined #emc
[17:47:08] <andypugh> Is Raen (from the forum here) I do hope not, I want to be rude about him to make myself feel better.
[17:48:20] -!-
LawrenceG [LawrenceG!~LawrenceG@S0106009027972e37.pk.shawcable.net] has joined #emc
[17:50:32] -!-
pcw_home has quit [Remote host closed the connection]
[17:51:11] -!-
pcw_home [pcw_home!~chatzilla@ip-66-80-167-54.sjc.megapath.net] has joined #emc
[17:55:05] <JT-Shop> please do
[17:57:32] <pcw_home> must resist impulse to snark...
[17:58:55] <jthornton> what do I need to look for to switch a 500 watt resistive load on and off with logic level voltage?
[17:59:30] <Jymmm> contactor and a ssr ???
[17:59:49] <jthornton> the chip thingys
[18:00:12] <jthornton> is it a MOFSET?
[18:00:28] <Jymmm> http://lh4.googleusercontent.com/public/CpXakwvHgHEF_3YwgisokmW1CnuEIVKy5oVAgzHCgJAOVL-Ibnkcqyv-VCe6fpB-Fq8RJ9zCX3NGLKyNTPGQENkiBmgyKqYF_yw3KBpqwh4qJwA06FK6ObY2gFU8Zk7vLn82GPIy0N224uXe0pBVHDI3qJt33Sk-7CXm4pg
[18:01:02] <Jymmm> http://lh4.googleusercontent.com/public/okvQm_9sOjTLCXTwGiLWBSYxTfbqUPAu8NtY8lcSpkcI8B-pJn83Qav83EedTgnSviNg8LlFsEqhkZpv3TvSzW_kBWBLGaL1t3O3cxBwk3T4zVrkwN4KT1T5dnASmu0fO37wE6H0Uww-LZSGsiF4zR70mK0c9VFzKc5Dixc
[18:01:21] <jthornton> Jymmm: I know what they are :P
[18:01:30] <pcw_home> SSR or TiRIAC and a little circuitry
[18:01:39] <pcw_home> TRIAC
[18:01:56] * jthornton looks up TRIAC
[18:02:45] <jthornton> thanks pcw_home
[18:03:09] -!-
SWPLinux has quit [Changing host]
[18:03:15] -!-
SWPLinux has quit [Quit: Reconnecting…]
[18:03:16] <pcw_home> For low volume I'd just get a 5A or so SSR
[18:03:42] <jthornton> ok
[18:03:58] <pcw_home> Then you dont have to deal with the isolation
[18:04:00] -!-
SWPLinux has quit [Changing host]
[18:04:08] -!-
SWPLinux [SWPLinux!~ChattyOne@emc/developer/SWPadnos] has joined #emc
[18:04:31] * Jymmm smacks jthornton on the back of the head... LISTEN! next time damnit! I'd always steer ya the wrong way some of the time!
[18:04:55] <Jymmm> SWPLinux: any cool toys?
[18:05:27] <jthornton> I'll be darn an opto22 showed up on my newark search
[18:05:36] <Jymmm> DUH
[18:06:23] <Jymmm> I never could understand their part number scheme
[18:06:49] <Jymmm> no their color coding
[18:06:58] <Jymmm> nor
[18:07:15] <Jymmm> jthornton: you going for board mount?
[18:07:31] <jthornton> if possible
[18:08:05] <Jymmm> jthornton: they have funny "sockets" tat fit in the PCB, best to double check the mounting.
[18:08:24] <Jymmm> s/tat/that/
[18:08:35] <SWPLinux> Jymmm: yep, loads of them
[18:09:01] <Jymmm> SWPLinux: Cool, grab me three of each =)
[18:09:06] <SWPLinux> http://www.vidtonic.com/
[18:09:18] <SWPLinux> that's one that folks here might get a kick out of :)
[18:10:19] <SWPLinux> oh, and there's a company that makes drill bits and saw blades with a lifetime guarantee. the guy was drilling through files, throwing glowing sparks off the bit, using a cheapo Sears drill press
[18:10:22] <psha> andypugh: what scares me is that on internet forums/chats/etc aged men behave just like scholars!
[18:10:24] <SWPLinux> bad dog or something
[18:11:16] -!-
qq- has quit [Ping timeout: 255 seconds]
[18:11:26] <Jymmm> weird to e selling tooling at CES
[18:11:31] <Jymmm> s/e/be/
[18:11:40] <SWPLinux> the Motorola Atrix phone looks pretty interesting - there's a caddy for it that more or less turns it into a laptop computer (it's a keyboard/display/charging station). the phone has a dual core 1.2GHz processor I think, so it's actually usable
[18:11:50] <SWPLinux> yeah, I was surprised to see a drill and sparks flying
[18:11:52] <andypugh> When you say "scholars" I assume you mean schoolchildren, rather then university academics... But now yu mention it...
[18:11:57] <SWPLinux> usually sparks are a bad thing at an electronics show
[18:12:05] <Jymmm> SWPLinux: heh
[18:12:16] <andypugh> Probably a lump of stellite.
[18:12:25] <Jymmm> SWPLinux: was it general tooling or precision?
[18:12:41] <SWPLinux> the guy had put about 20 holes in a file, as well as about 50 in a disc rotor (I think), so the bit was getting "a little tired" :)
[18:12:45] <SWPLinux> general I think
[18:12:56] <Jymmm> SWPLinux: bummer
[18:13:08] <SWPLinux> drill bits, router bits, saw blades, and a really cool nibbler attachment for hand drills
[18:13:23] <Jymmm> SWPLinux: it probably would cost more to ship back for a replacemnet
[18:13:26] <SWPLinux> well, you could measure the cut diameter and use tool compensation
[18:13:49] <SWPLinux> drill bits are pretty lightweight individually
[18:13:56] <SWPLinux> light weight
[18:14:30] <Jymmm> SWPadnos: anything else?
[18:14:37] <SWPLinux> err, yeah, loads :)
[18:14:51] -!-
qq- [qq-!~Moldovean@unaffiliated/qq-] has joined #emc
[18:14:56] <SWPLinux> there are about 100 manufacturers with new Android tablets
[18:15:02] <Jymmm> SWPadnos: Well, haven't heard anything "new" or that hasn't happened before
[18:15:09] <pcw_home> jthorton: something like this
http://search.digikey.com/scripts/DkSearch/dksus.dll?Detail&name=CC1119-ND
[18:15:46] <psha> andypugh: sometimes i'm too lazy to use vocablorary :)
[18:16:02] <SWPLinux> there was a very cool 3d-ish display that had a convincing 3d effect:
http://innovisionlabsusa.com/products.html
[18:16:05] <Jymmm> SWPadnos: got the gf one of these for xmas, she likes it
http://www.pandigital.net/pandigitalnovel
[18:16:28] <SWPLinux> what size is that?
[18:16:37] <jthornton> pcw_home: thanks, that is exactly what I'm looking for I think
[18:16:41] <SWPLinux> and what cost?
[18:16:44] <Jymmm> SWPadnos: And until google supports tablets, there will be issues with screen size on the tablets
[18:16:53] <Jymmm> SWPadnos: $125
[18:16:59] <SWPLinux> the Archos 10.1" is very nice, and costs $299 or $349
[18:17:19] <SWPLinux> yeah, most of the tablets had some issues, like the status pull-down not being the full width
[18:17:22] <Jymmm> SWPadnos: 10" is a bit too big. the 7" looks/feels nice
[18:17:41] <SWPLinux> NEC had a nice "school book reader" that was a dual-screen job. there was another company with one of those as well
[18:18:12] <SWPLinux> the Archos has USB host and device ports, as well as HDMI out
[18:18:22] <SWPLinux> so it's good for lots of stuff other than book reading
[18:18:23] <Jymmm> SWPadnos: Yeah, like I said. anything NEW?
[18:18:49] <SWPLinux> not much really. faster CPUs, faster video cards, some cool speakers that are $20k a piece, that sort of thing
[18:18:50] <Jymmm> oh just same old shit just polished up?
[18:18:59] <SWPLinux> yeah, and performance tuned
[18:19:03] <Jymmm> eh
[18:19:09] <Jymmm> thanks
[18:19:13] <SWPLinux> sure
[18:19:32] <Jymmm> SWPadnos: I ike it when they come out with something new and innovative
[18:19:48] -!-
qq- has quit [Ping timeout: 246 seconds]
[18:19:59] <SWPLinux> that's pretty rare these days, depending on your criteria for calling something "new"
[18:20:29] <Jymmm> SWPadnos: Hell man, they STILL haven't come up with a media device yet
[18:20:53] <Jymmm> lot of half-ass ones
[18:23:01] <SWPLinux> oh. there was a "new" kind of computer system on display which was really neat:
http://xi3.com/
[18:23:12] <SWPLinux> there are plenty of media devices here
[18:23:29] <SWPLinux> and you'd be amazed at the range of LED flashlights, rope lights, and other lights
[18:27:19] -!-
Dallur has quit [Quit: Leaving.]
[18:30:15] -!-
qq- [qq-!~Moldovean@unaffiliated/qq-] has joined #emc
[18:30:27] <Jymmm> SWPadnos: watching
http://xi3.com/product_videos.php trying to figure out the details
[18:31:38] <SWPLinux> it's basically a tiny computer, but they do publish (or will provide) the specs for people to build their own peripheral/carrier cards
[18:31:51] <Jymmm> SWPadnos: aka: gettign past the marketing hype buzz word bullshit
[18:32:18] <SWPLinux> they had an interesting demo of one "computer" and 3 additional "terminals" connected together. Kind of like a tiny mainframe :)
[18:32:43] <Jymmm> SWPadnos: Yeah, I noticed a custom interface connector
[18:32:43] <SWPLinux> so it was 4 monitors/mice/keyboards, but one "PC"
[18:32:46] -!-
TonnyG [TonnyG!~tyfyu@125.164.131.240] has joined #emc
[18:32:54] <SWPLinux> the internal boards can also be switched out
[18:33:49] <SWPLinux> anyway, I should head back to the show floor. gotta talk to Realtek about RTNet, and maybe Intel about abysmal interrupt latency on their desktop CPUs :)
[18:34:13] <Jymmm> SWPadnos: Good luck in getting intel to listen to anything
[18:34:26] <SWPLinux> heh
[18:34:28] <psha> SWPLinux: several terminals to one computer is not something great... but separated south bridge is
[18:34:56] <SWPLinux> I talked to a lady from Intel on the shuttle from the airport. she's an anthropologist (which seemed strange)
[18:35:13] <psha> she's studying intel customers!
[18:35:15] <Jymmm> no doubt
[18:35:20] <Jymmm> lol
[18:35:55] <Jymmm> lol "uber-scalable"
[18:36:51] -!-
qq- has quit [Ping timeout: 272 seconds]
[18:39:28] <Jymmm> SWPLinux: I like the modularity of Xi3, but you KNOW their gonna fsck it up somewhere along the line.
[18:40:03] -!-
qq- [qq-!~Moldovean@unaffiliated/qq-] has joined #emc
[18:43:33] -!-
theorb [theorb!~theorb@91.84.53.6] has joined #emc
[18:43:40] -!-
theorbtwo has quit [Ping timeout: 255 seconds]
[18:43:44] theorb is now known as
theorbtwo
[18:45:18] -!-
skunkworks_ [skunkworks_!~chatzilla@98.125.122.80] has joined #emc
[18:46:34] -!-
skunkworks has quit [Ping timeout: 276 seconds]
[18:46:39] skunkworks_ is now known as
skunkworks
[18:52:25] -!-
wobblybootie has quit [Quit: Page closed]
[18:53:39] <Jymmm> Serial (TTL) =
http://www.betterimprovement.com/wp-content/uploads/2008/04/cast-iron-hibachi-bbq-grill.jpg, RS232 (good old reliable)=
http://www.smartmarine.co.nz/images/large/weber%20one%20touch%20gold%20black%20bbq%2057cm.jpg, RS485 (YEAH BABY!!!)=
http://i894.photobucket.com/albums/ac150/Bobsarno/Worlds-largest-smoker.jpg
[18:53:49] -!-
wobblybootie [wobblybootie!5c11c5d0@gateway/web/freenode/ip.92.17.197.208] has joined #emc
[18:54:12] -!-
tlab [tlab!~tlab@c-69-243-187-136.hsd1.in.comcast.net] has joined #emc
[19:13:56] -!-
tlab has quit [Quit: Leaving]
[19:16:51] <skunkworks> http://www.youtube.com/watch?v=5vvP4L_hr90
[19:17:03] -!-
pcw_home has quit [Remote host closed the connection]
[19:25:13] -!-
LawrenceG has quit [*.net *.split]
[19:25:13] -!-
psha has quit [*.net *.split]
[19:25:13] -!-
awallin has quit [*.net *.split]
[19:25:13] -!-
celeron55 has quit [*.net *.split]
[19:25:13] -!-
tris has quit [*.net *.split]
[19:25:13] -!-
lerman has quit [*.net *.split]
[19:26:14] -!-
LawrenceG [LawrenceG!~LawrenceG@S0106009027972e37.pk.shawcable.net] has joined #emc
[19:26:14] -!-
psha [psha!~psha@213.208.162.69] has joined #emc
[19:26:14] -!-
awallin [awallin!~quassel@cs27061165.pp.htv.fi] has joined #emc
[19:26:14] -!-
celeron55 [celeron55!~perttu@a91-155-42-12.elisa-laajakaista.fi] has joined #emc
[19:26:14] -!-
tris [tris!~tristan@CAMEL.ETHEREAL.NET] has joined #emc
[19:26:14] -!-
lerman [lerman!~lerman@24-151-1-146.static.nwtn.ct.charter.com] has joined #emc
[19:26:44] <TonnyG> <Jymmm> hei? it's a grill?
[19:26:51] <andypugh> I am pleased that my cunning plan to mount a 14mm hub pulley on an 11mm shaft seems to work.
[19:26:57] <TonnyG> <skunkworks> thats nice
[19:27:47] <TonnyG> good for u mr.Andy
[19:29:02] <andypugh> I bored a 6 degree taper in half the length of the pulley bore, and then machined a steel conical split wedge that is pulled in by the shaft-end bolt. Like a very slim version of a Taperlock.
[19:31:19] -!-
pcw_home [pcw_home!~chatzilla@ip-66-80-167-54.sjc.megapath.net] has joined #emc
[19:31:52] <TonnyG> cnc working a steel... in whats speed? ...mm/sec
[19:33:14] <andypugh> Mild steel I work at 30mm/min, but I could go higher, and if I had coolant probably double would be fine.
[19:34:46] <TonnyG> thats cool, i never works with steel before.
[19:34:56] <andypugh> I have machined steel at 120mm/min with a CBN tip:
http://www.youtube.com/watch?v=wIMEPkK-Doc
[19:35:47] <TonnyG> no damages to the worm rail?
[19:36:39] <andypugh> worm rail?
[19:36:58] <TonnyG> kind of ball screw
[19:37:34] <TonnyG> what u call it?
[19:37:42] <andypugh> Ball screw :-)
[19:37:58] <TonnyG> ah, yeah.
[19:38:51] <andypugh> Depends what you mean by "damage". I was machining the end of a ballscrew to attach bearings.
[19:39:43] <TonnyG> steel = big load
[19:40:01] <andypugh> Super-hard steel means bigger still
[19:40:57] <TonnyG> ...yeah, maybe it is just 'my machine is smaller' hehe
[19:41:41] -!-
pcw_home has quit [Remote host closed the connection]
[19:41:48] <TonnyG> you guys play real thing there
[19:41:56] <skunkworks> heh
[19:42:34] -!-
pcw_home [pcw_home!~chatzilla@ip-66-80-167-54.sjc.megapath.net] has joined #emc
[19:43:21] -!-
pcw_home has quit [Remote host closed the connection]
[19:44:16] <TonnyG> btw. your cnclathe not using some liquid coolant?
[19:44:34] <TonnyG> spread some fire
[19:45:06] <TonnyG> but the sound still soft
[19:47:28] -!-
ries [ries!~ries@200.125.129.54] has joined #emc
[19:47:38] <andypugh> I haven't got round to sorting out coolant. I probably never will with that lathe. I am far more likely to try to find something that was actually built properly in the first place.
[19:49:51] <TonnyG> i see.
[19:52:26] <TonnyG> btw,i see this for small machine, might work on hard(er) metal:
http://www.youtube.com/watch?v=-uEyFv1cD4o&feature=related
[19:52:35] <TonnyG> ('s not mine)
[19:53:26] <andypugh> I have no idea what it going on there.
[19:53:47] <TonnyG> only if we could maintain the vibration of the grinding
[19:53:51] <andypugh> I can't believe they are regrinding the ball track.
[19:54:17] <TonnyG> haha
[19:55:29] <andypugh> I finished machining my castings and have assembled the Z axis actuator.
https://picasaweb.google.com/bodgesoc/Gibbs?pli=1&gsessionid=LXd4dzizoQHFH9ugl1Pc0g#5559905744520719218
[19:57:04] <TonnyG> see, i call it quadrature
[19:57:44] <TonnyG> and it is perfect, imho.
[19:58:34] <TonnyG> but 1 leg, the bearing would suffer a bit.
[19:59:16] <skunkworks> andypugh: what is that for?
[20:01:31] <andypugh> It's the Z axis actuator. The part on the left sits on the machine base where the table rise nut was. Then underneath, in the base, is the motor. Effectively the table up/down is exactly as it was, except that now the nut can be twirled electronically.
[20:02:05] <andypugh> The leadscrew goes in at the left-hand end, passes all the way through, and past the side of the motor.
[20:03:05] <TonnyG> ofcourse. it would do just greats
[20:04:19] <TonnyG> thats is very special.
[20:09:49] <TonnyG> it would gain optimal precision.
[20:11:46] -!-
pcw_home [pcw_home!~chatzilla@ip-66-80-167-54.sjc.megapath.net] has joined #emc
[20:12:00] <TonnyG> very high power also
[20:12:15] <JT-Shop> YEA! another bit of it standing upright
[20:12:47] <TonnyG> :) Hi mr.JT-Shop
[20:16:39] <TonnyG> btw. how precise is the quadrature? p/r
[20:16:56] <andypugh> Quadrature?
[20:17:23] <TonnyG> yeah, i miss spell it, my fault
[20:17:32] <TonnyG> eh?
[20:17:39] <andypugh> No, I mean I don't know what you are asking.
[20:18:01] <TonnyG> yeah, u did not use it?
[20:18:45] <TonnyG> u re using mesa right?
[20:19:07] <andypugh> Yes, though that axis is a long way from being run yet.
[20:19:36] <TonnyG> hei, whats your plan with it?
[20:20:06] <andypugh> Well, first I need to get the Resolver converter working again.
[20:20:09] <TonnyG> :)
[20:20:28] <andypugh> I improved the software, and now it doesn't work at all.
[20:21:12] <TonnyG> how come? it's a very good one.
[20:22:26] <andypugh> The resolver convertor is an Arduino.:
http://wiki.linuxcnc.org/emcinfo.pl?ResolverToQuadratureConverter
[20:22:56] <TonnyG> (hehe, u read my mind)
[20:24:24] <TonnyG> so there is some kind of missing link, from motor to mesa
[20:25:19] <andypugh> In this case, yes. Mesa sell a Resolver convertor, but just buying stuff that works is no fun :-)
[20:25:52] <andypugh> Resolvers are Analogue devices, so you need to do clever stuff to get the data into EMC2
[20:26:43] <TonnyG> 'no fun'. true. make sense.
[20:27:41] -!-
emcrules_laptop [emcrules_laptop!~emcrules_@CPE001310e6c94f-CM001bd71cb794.cpe.net.cable.rogers.com] has joined #emc
[20:27:59] <TonnyG> no pain, no game! (like me trying to figure it out emc2 architecture) ;-)
[20:28:57] <TonnyG> what is resolver0. resolver1, resolver2 -->seem lke transformator to me?
[20:29:29] <TonnyG> or hall sensor?
[20:31:21] <andypugh> Resolvers are rotary transformers, depending on the angle the two outputs vary in a sign-cosine relationship. They make very accurate, very tough, rather dificult to use absolute encoders.
[20:32:08] <TonnyG> ...
[20:32:34] <TonnyG> so there is motor on motor?
[20:33:19] <TonnyG> electro motor on electro motor
[20:33:20] <andypugh> No. It is purely an encoder.
[20:33:37] <psha> bb all
[20:33:38] -!-
psha has quit [Quit: leaving]
[20:33:59] <TonnyG> HI, Mr.Psha how r u today!
[20:34:27] <TonnyG> eh? gone already?
[20:34:35] <TonnyG> ok
[20:35:10] <TonnyG> 3 transformer to replace 3 hall sensor?
[20:37:10] <TonnyG> there are 2 choice of *.pde
[20:38:56] <TonnyG> the target is to gain incrimental encoder of ABZ
[20:42:08] <TonnyG> but, what if, the motor r moving so slow. thats very slow... would these circuit still able to read them?
[20:42:28] <TonnyG> be
[20:42:39] <andypugh> TonnyG: No, there are three resolvers for three separate motors. The idea is to use just one Arduino for all my axes.
[20:46:33] <jthornton> my Arduino just blinks some led's atm
[20:47:48] <TonnyG> (haha...)(hei, wait, i might face that condition too.)
[20:47:54] <TonnyG> ...hmm.
[20:48:58] <TonnyG> what is the output of 1 resolvers... a single sinus or also cosinus
[20:49:36] <TonnyG> it going to the adc..right
[20:49:53] <andypugh> The input is a sine wave at a few kHz, the output is a sine and cosine wave. The ratio of their amplitudes tells you the angle.
[20:50:41] <TonnyG> <TonnyG> but, what if, the motor r moving so slow. thats very slow... would these circuit still able to read them?
[20:52:50] <andypugh> Yes, it still works when stationary. The movement has nothing to do with the operation, that is why you need a 10kHz sine-wave input to it.
[20:53:43] -!-
andrus has quit [Ping timeout: 255 seconds]
[20:54:39] <TonnyG> IC1A pin1 is 10kHz sine-wave?
[20:55:49] <andypugh> Yes. That's an Op-Amp working as both a power amp and active filter.
[20:56:30] <andypugh> So a PWM synthesised sine wave goes in from the Arduino, and a nice smooth sine wave at a decent current comes out.
[20:57:51] <TonnyG> maybe it would be very nice decision if we replace resolvers with hall sensor
[20:58:47] <andypugh> They do different things.
[20:59:22] <andypugh> The resolver is instead of an encoder, but because it is an absolute encoder, you don't need Hall sensors.
[20:59:26] <TonnyG> ah.
[21:00:16] <TonnyG> so why not?
[21:00:33] <TonnyG> The resolver is instead of an encoder
[21:01:36] <TonnyG> encoder is good
[21:01:40] <andypugh> Hall sensors tell you roughly where the rotor is so that the drive knows which phases to energise. If you have an absolute encoder you don't need to "roughly know", you already know exactly.
[21:03:48] <TonnyG> so the problem is, if we do not already know the exact..
[21:04:04] <TonnyG> ah.
[21:05:26] <TonnyG> ?
[21:07:02] <TonnyG> if that is the case, we should usethe back emf. (electro magnetic feald)
[21:07:29] <TonnyG> :)
[21:08:39] <skunkworks> TonnyG: resolvers work better in crappy environments.. (oil and such)
[21:09:44] <TonnyG> u mean 'dirty' environment
[21:12:29] <TonnyG> ok.
[21:13:23] <TonnyG> back emf would do the same.
[21:14:20] <TonnyG> :)
[21:14:25] <andypugh> You can't sense position to 1/4000 of a rev with back-emf
[21:15:09] <TonnyG> eh. that is totally true. 4000
[21:15:54] <andypugh> We aren't just trying to spin the motor, we want to control its position to a tiny fraction of a rev too.
[21:16:47] <TonnyG> and what kind of core do u have on the transformer? ferrit would hold high freq.
[21:17:09] <andypugh> I have no idea, it's all built into the motor.
[21:17:41] <andypugh> The three transformers shown in that circuit diagram are the three resolvers built in to the three motors.
[21:18:51] <TonnyG> eh.... actually i never see the 'inner of bldc' just like u have on the picture above. could i have the picture of the inner side of the motor... to examine it.
[21:19:20] <andypugh> I haven't taken them apart, and prefer not to.
[21:20:15] <TonnyG> ah. how do you know it's already build in?
[21:20:23] <TonnyG> :|
[21:20:39] <andypugh> Because I have the connector pin-out
[21:20:59] <TonnyG> may i took a peak :>
[21:23:51] <TonnyG> the connector pin-out diagram
[21:24:34] <TonnyG> :) offcourse if u have some time. it is not have to
[21:25:00] <andypugh> It won't tell you much, as any motors you have are likely to be different.
[21:26:04] <TonnyG> is ok. these type of motor are rarely seen on damage.
[21:27:18] <TonnyG> at the contra, often the controller one.
[21:32:35] <TonnyG> :)
[21:37:39] -!-
odiug [odiug!~guido@p57BD0E75.dip0.t-ipconnect.de] has joined #emc
[21:37:48] <TonnyG> Time will come, that these Motor Runs again.
[21:41:22] <TonnyG> i ll study your wiki about bldc subject again. i just trying to help. ;imho, it's very interresting subject.
[21:44:22] -!-
awallin_ [awallin_!~quassel@cs27061165.pp.htv.fi] has joined #emc
[21:44:32] -!-
awallin has quit [Ping timeout: 240 seconds]
[21:52:54] <TonnyG> i just go to mr.awallin sites. maybe it would help a bit.
http://www.anderswallin.net/?s=spindle&cat=plus-5-results
[21:53:15] <TonnyG> i just got there.. yet reads.
[21:54:55] <TonnyG> have u been there mr.andypugh? he has the same research
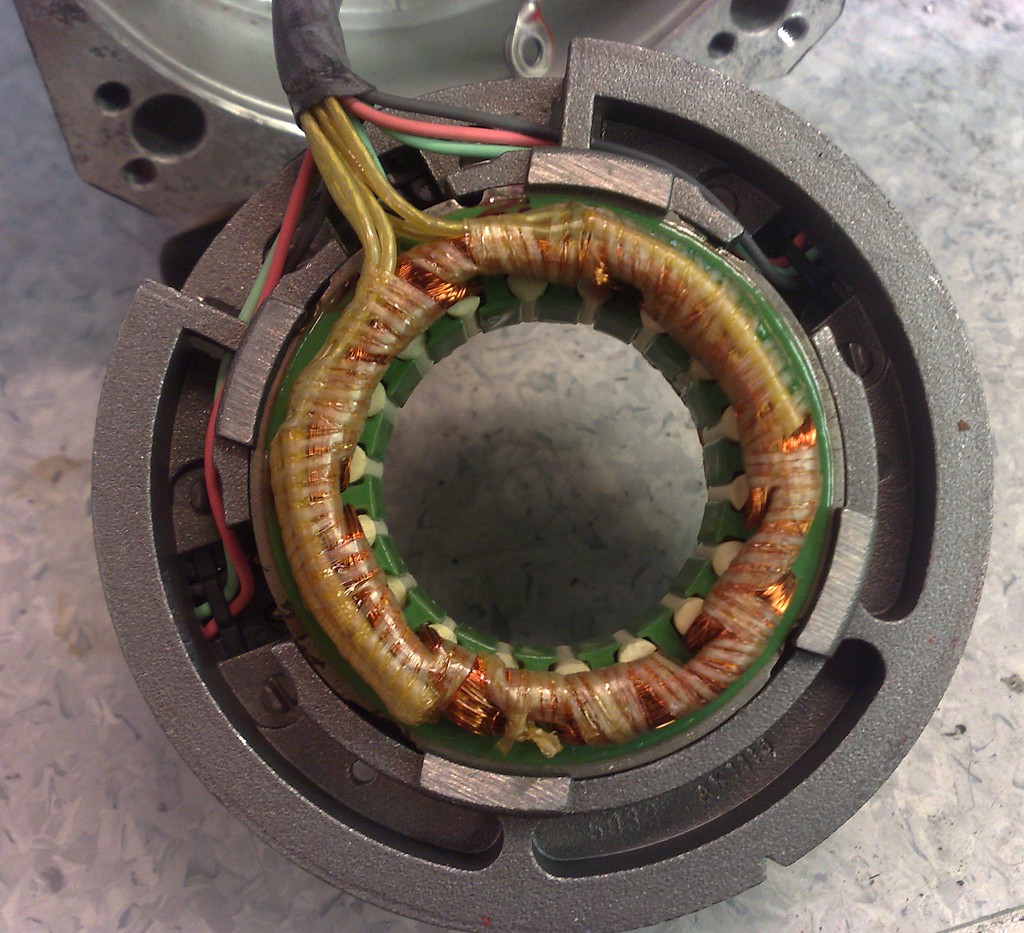
[21:58:13] <TonnyG> http://www.anderswallin.net/wp-content/uploads/2009/11/resolver_and_hallsensors.jpg
[21:58:53] <TonnyG> 3 cable red-green-black x3
[22:01:46] -!-
mndlbld [mndlbld!~mndl@77-95-78-113.bb.cust.hknett.no] has joined #emc
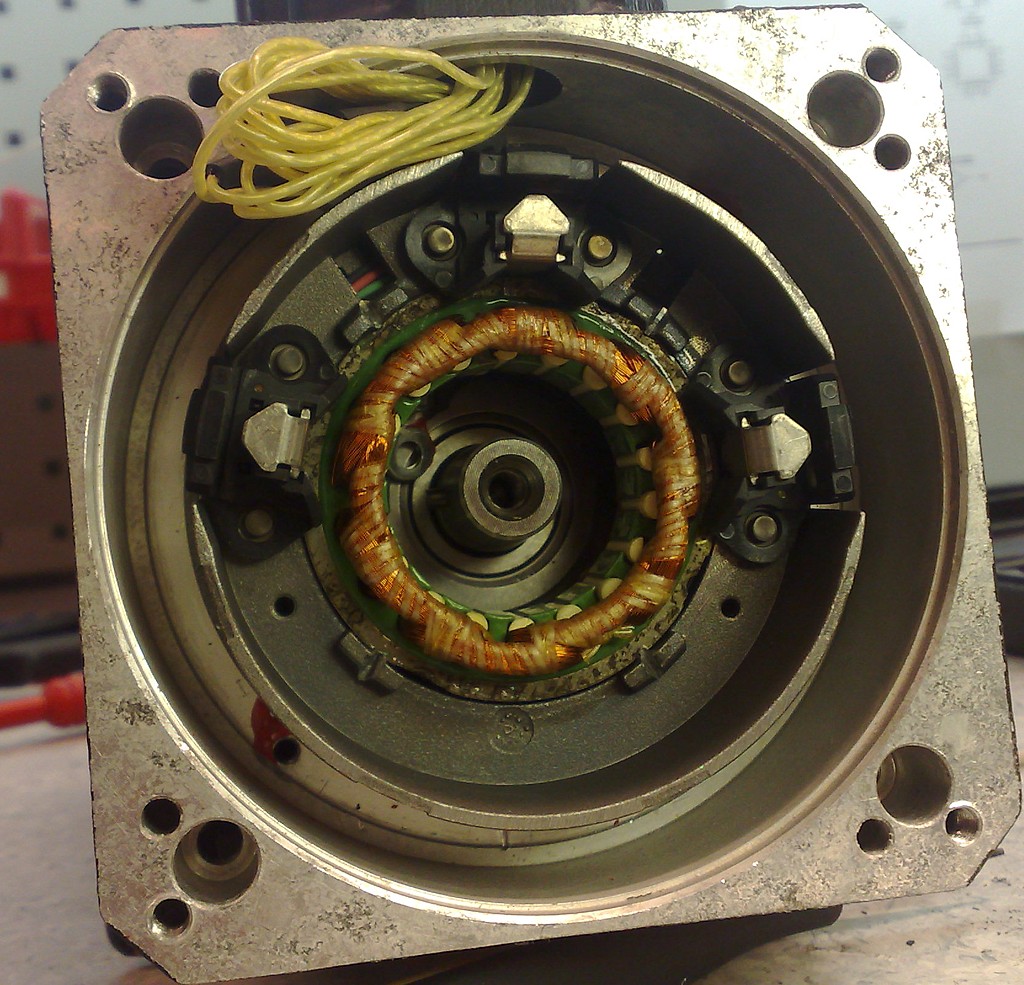
[22:02:04] <TonnyG> http://www.anderswallin.net/wp-content/uploads/2009/11/motor_back.jpg
[22:04:37] <TonnyG> Hi mr.awallin_ !
[22:05:52] <TonnyG> :) i hope it is allright that i put your link here. we or me r study bldc.
[22:11:22] <TonnyG> gtg right now. Thanks to every one, including <andypugh>,<skunkworks>,<awallin_>
[22:11:35] <andypugh> Bye
[22:11:38] -!-
TonnyG has quit []
[22:16:16] -!-
emcrules_laptop has quit [Ping timeout: 240 seconds]
[22:28:20] <Jymmm> Any recommendations of epoxy to adhere metal to glass?
[22:34:37] <mendelbuild> andypugh: hey :)
[22:34:53] <andypugh> Hi
[22:34:53] <the_wench> hello andypugh, you have a question?
[22:39:43] -!-
micges [micges!~micges@afpb2.neoplus.adsl.tpnet.pl] has joined #emc
[22:39:55] <emcrules_> jymmm: lock thight has some instant adhiesives that work well
[22:40:13] <emcrules_> tight
[22:40:24] <andypugh> Or pray to Araldite, the greek goddess of adhesives.
[22:40:30] <Jymmm> I dont want INSTANT, I want epoxy for better holding power
[22:41:04] <emcrules_> then try hysol products
[22:41:39] <emcrules_> i think it's henkel now
[22:42:46] <andypugh> Araldite has always worked for me. I assume they have them in the US?
[22:43:26] <andypugh> Oh. How odd.
[22:43:27] <andypugh> http://www.huntsman.com/advanced_materials/index.cfm?PageID=5850
[22:43:43] <andypugh> First time I have seen a country dropdown with the USA
[22:45:10] <andypugh> (without)
[22:52:45] <andypugh> mendelbuild: Were you the one with the Router with mystery motors?
[22:53:39] -!-
Fox_Muldr has quit [Read error: Connection reset by peer]
[22:54:00] <mendelbuild> andypugh: yeah
[22:54:11] <andypugh> Are they any less mysterious tonight?
[22:55:10] <mendelbuild> no not really, too much snow to access my workshop :(
[22:55:26] -!-
Fox_Muldr [Fox_Muldr!quakeman@frnk-5f7446cc.pool.mediaWays.net] has joined #emc
[22:56:29] <andypugh> Ah
[22:58:37] <mendelbuild> had some big plans
[22:58:45] <mendelbuild> but i looked outside
[22:58:49] <mendelbuild> white all the way
[23:01:00] <andypugh> How easy do folk find it to work with bit-fields? I have a driver that currently lets you define which of 4 banks of 8 ports you want to activate by using a 32-bit number (for example 0x008001FF). That means that you can activate any combination you like.
[23:01:31] -!-
qq- has quit [Ping timeout: 255 seconds]
[23:01:31] -!-
foxdung has quit [Quit: Relax, its only ONES and ZEROS!]
[23:02:28] <andypugh> I am considering changing it to 4 separate numbers, so that example would then be 8,1,1,0. The problem there is that the third port has channel 7 active in the first case, but if you only want one channel in the second case it _has_ to be channel 0.
[23:02:52] -!-
seb_kuzminsky has quit [Read error: Operation timed out]
[23:02:54] -!-
tlab [tlab!~tlab@c-69-243-187-136.hsd1.in.comcast.net] has joined #emc
[23:04:01] <andypugh> So, the first way of doing it is more flexible, the second way is a bit easier for less computer-savvy people.
[23:04:09] <andypugh> Which would _you_ prefer?
[23:09:17] -!-
tom3p [tom3p!~tomp@74-93-88-241-Illinois.hfc.comcastbusiness.net] has joined #emc
[23:09:32] -!-
tlab has quit [Quit: Leaving]
[23:11:10] -!-
tlab [tlab!~tlab@c-69-243-187-136.hsd1.in.comcast.net] has joined #emc
[23:11:43] -!-
tom3p has quit [Client Quit]
[23:16:34] -!-
mndlbld has quit [Read error: Connection reset by peer]
[23:16:50] -!-
mendelbuild has quit [Read error: Connection reset by peer]
[23:18:59] -!-
foxdung [foxdung!~IceChat77@ip-206-124-216-130.static.eatel.net] has joined #emc
[23:23:12] -!-
mendelbuild [mendelbuild!~mndl@77-95-78-113.bb.cust.hknett.no] has joined #emc
[23:23:23] -!-
mendelbuilder [mendelbuilder!~mndl@77-95-78-113.bb.cust.hknett.no] has joined #emc
[23:26:53] <andypugh> I guess no-one has any opinions at all?
[23:31:57] <robh__> anyone in UK want a EMC fest, just added a 3rd machine to my retrofit list now
[23:32:49] -!-
odiug has quit [Ping timeout: 260 seconds]
[23:33:12] <andypugh> Where in the UK?
[23:34:23] <robh__> in the Fens ... east anglia
[23:35:01] <andypugh> Maybe, I am in Essex
[23:36:31] <robh__> aah not too fare then..30miles north of cambridge
[23:37:22] <andypugh> I guess the question is, what would we do?
[23:38:24] <robh__> our CHNC just gave up working, so got that to convert over now when i finish the 2nd lathe, and 2 VMS waiting to be refitted too
[23:39:27] <andypugh> I could show how bldc works. (or if it works)
[23:39:38] <andypugh> Depending on what motors and drives you have.
[23:40:55] <robh__> on it are Siemends DC, 196v 5amp
[23:40:59] <robh__> 3000rpm
[23:41:30] <andypugh> How are you driving those from EMC2?
[23:41:43] <andypugh> PWM/dir I guess?
[23:41:46] <robh__> Siemens Drives , analog input
[23:41:53] <andypugh> Brushed motors?
[23:41:56] <robh__> ye
[23:42:10] <andypugh> Too simple to be interesting then :-)
[23:42:53] <robh__> other stuff is Fanuc yellow caps, Brushed DC again
[23:43:21] <andypugh> You don't have any red-caps? I really want to fiddle with those.
[23:44:30] <robh__> no
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}