Back
[00:00:41] <Guest176> well it's still not running
[00:00:48] <Guest176> i think it might be a connection problem
[00:00:53] <Guest176> i will call them in the morning
[00:00:58] <Guest176> thank you for your help
[00:01:00] <SWPadnos> ok. good luck with it
[00:21:49] <skunkworks> jepler: I will be interesting how low you can get the following error (hooked to a real machine ;)) It seems whatever setup I had - I could not get less than .0005 :)
[00:24:58] <skunkworks> "
[00:54:33] <kakeman> Can a 6 wire motor be used with a bipolar driver?
[00:54:34] <kakeman> A. Yes. A 6 Wire motor can be used with either a unipolar or bipolar driver.
[00:54:38] <kakeman> ?
[01:17:26] <skunkworks> jepler:
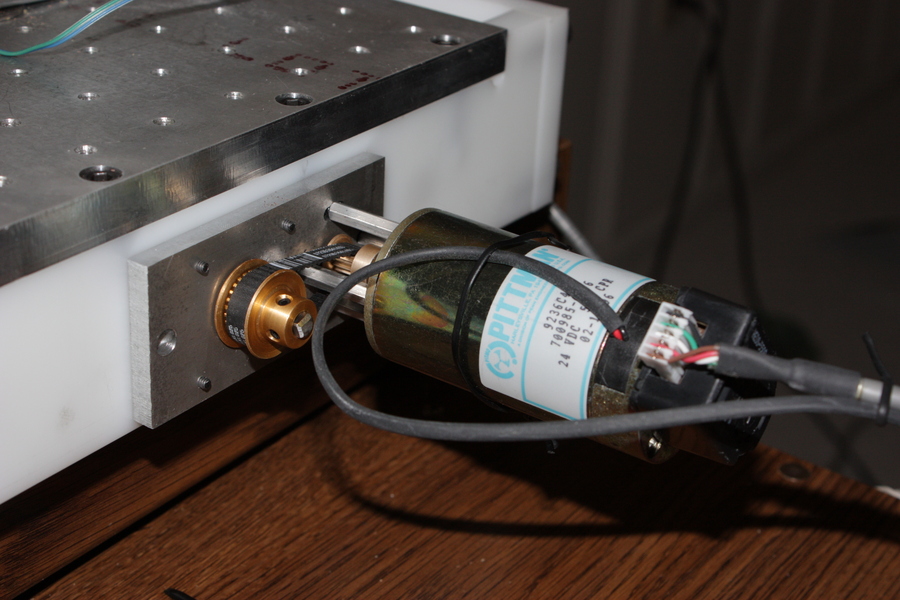
http://media.unpythonic.net/emergent-files//01245634880/img_4758-medium.jpg
[01:17:34] <skunkworks> the shaft is square?
[01:17:58] <skunkworks> that goes through the larger timing pully
[01:19:25] <skunkworks> or did the 2 sides get flattened for the setscrews?
[01:19:59] <skunkworks> that must be it.
[01:49:32] <jepler> skunkworks: two flats are ground onto the dowel pin for the setscrews
[01:53:07] <jepler> http://emergent.unpy.net/files/sandbox/zenbot-more-tuning.png -- 100 micro inch ~ 7.5 encoder counts
[01:57:22] <jepler> something I don't understand yet: I have a nonzero Igain and set my dedband to 1e-8. But pid's command output isn't increasing over time in response to steady-state error; or if it is, it's too small to see.
[01:59:08] <jepler> ah, ok, it was too small to see the effect
[02:08:04] <skunkworks> jepler: Nice!
[02:12:30] <jepler> I'm still uncomfortable about that oscillation that can be seen in the velocity / pid error
[02:16:29] <skunkworks> are you using 10khz servo period?
[02:17:05] <jepler> no, this is 1kHz
[02:17:19] <jepler> I've discarded the theory that it's the teeth, I can't make the numbers match up
[02:20:10] <skunkworks> seb!
[02:20:14] <jepler> hi seb_kuzminsky
[02:21:51] <jmkasunich> * jmkasunich got a new toy:
http://www.everytrail.com/view_trip.php?trip_id=249593
[02:26:14] <roh> hey jepler
[02:26:46] <skunkworks> jmkasunich: that looks neat
[02:26:59] <roh> jepler i tried to replicate your ardunino hack to add some analog inputs to my emc.
[02:28:52] <roh> jepler did not quite understand why the baudrate was chosen so low
[02:29:06] <jepler> roh: beats me .. I probably just chose a conservative value.
[02:29:37] <roh> how 'fluid' should the updates come in? i tried teh halrun but had the impression its static
[02:29:41] <jepler> I don't actually use the arduino that way, I wrote the article more to show that it was possible than because I needed it
[02:30:40] <roh> i see. well., i thought its a nice way to use that to have a way others can replicate if my reprap-emc finally works ;)
[02:32:03] <jepler> If I remember correctly, the avr writes "as fast as it can", but it takes something over 2*8*10 serial bit counts to transfer all the data
[02:32:04] <roh> means, i am trying to make it simple as possible to redo. only parts which everybody can get easily and for cheap money. i do not even have an arduino. i just flashed an atmega168 i had around with the bootloader and added the crystal
[02:37:53] <seb_kuzminsky> hi guys
[02:38:23] <seb_kuzminsky> jepler: nice zenbot servos!
[02:42:18] <jepler> seb_kuzminsky: thanks
[02:42:39] <jepler> roh: roh so is it working for you or is it not working?
[02:43:40] <jepler> seb_kuzminsky: velocity 2.4in/sec, acceleration 32in/sec^2, ferror ~ 200 micro inch on rapids and less on feeds
[02:43:57] <jmkasunich> zenbot is now zoombot
[02:44:18] <seb_kuzminsky> sweet :-)
[02:44:56] <skunkworks> 2.4in/sec? Nice
[02:45:36] <jepler> seb_kuzminsky: thanks for working on getting that stepper stuff in 2.3. sorry I can't test it :(
[02:45:52] <jepler> also, I can't play daisy anymore
[02:46:27] <seb_kuzminsky> i just tele-helped my friend get his sherline 2100 up with 2.3.0:
http://explosive.net/~mdt/Sherline-2100-EMC2.AVI
[02:46:48] <seb_kuzminsky> jepler: well i'm glad the steppers dont suck quite so much any more
[02:47:06] <seb_kuzminsky> servos drivers are so easy compared to steppers :-)
[02:47:07] <SWPadnos> seb_kuzminsky, were the step and dir pins swapped in the sample config?
[02:47:19] <seb_kuzminsky> i dont think so
[02:47:22] <SWPadnos> hmmm
[02:47:24] <SWPadnos> ok
[02:47:28] <seb_kuzminsky> do you think so?
[02:47:47] <SWPadnos> there was a guy on earlier who I tried to help, and a document I found on the web made me think so
[02:47:57] <SWPadnos> but swapping them didn't fix his problem either, so ...
[02:48:10] <SWPadnos> http://www.crackpotinventor.com/rotary/cnc/index.html
[02:48:17] <seb_kuzminsky> heh, crackpot
[02:48:38] <seb_kuzminsky> maybe he needs gpio.is_opendrain?
[02:48:39] <SWPadnos> crackpot inventor, thank you very much :)
[02:48:44] <SWPadnos> on a parport?
[02:48:47] <SWPadnos> :)
[02:49:08] <seb_kuzminsky> oh
[02:49:13] <SWPadnos> oh duh -you're the mesa driver guy, why would you help someone with a parallel port?
[02:49:19] <SWPadnos> :)
[02:49:30] <seb_kuzminsky> if its not a mesa i probably dont understand it
[02:49:41] <seb_kuzminsky> if it *is* a mesa i still probably dont understand it :-/
[02:49:45] <SWPadnos> heh
[02:51:47] <roh> jepler it kinda worked.. but somehow now my halrun tests didn update the bar anymore
[02:54:55] <jepler> roh: hmm
[02:55:22] <jepler> I'd start by trying to determine whether there are actually serial communications going on in each direction
[02:55:32] <roh> but i need to solder my board first anyways, my first tests were with the stk500
[02:55:56] <roh> ive seen 3.3V on one input once so i am kinda sure it executed the code
[02:56:41] <roh> but now i need a board to add the temperature-sensor and the resistors to make it generate a useful voltage for measuring.
[02:57:15] <jepler> it may be that you're better off using that code simply as a general impression of what you need to do, and making it custom to your purpose
[02:57:27] <jepler> I basically dashed it off in an afternoon, so it's probably quite stupid
[02:57:35] <roh> jepler i didnt fully understand your protocol. should the avr just 'push out' 9600baud of adc values roundrobin?
[02:57:46] <roh> or is that polled somehow?
[02:57:47] <jepler> roh: that's how I read it too
[02:58:22] <jepler> that as long as it doesn't have anything to read, that is
[02:59:49] <jepler> skunkworks: the motor never got warm to the touch
[02:59:49] <roh> i think i need to write some small debugtool to test it without the emc machine / mod arduino.py for debugging. my emc machine is in the milling room and its hard to debug there
[03:00:15] <jepler> since that's a userspace component, you can test it with emc2.3-sim and no rtai kernel required
[03:00:27] <jepler> time for me to call it a night .. good luck
[03:01:19] <roh> warm motors? mmmh.. our steppers get fairly hot too.. regarless if one mills or just lets it idle
[03:02:11] <roh> jepler it will measure the temperature of the reprap head on this extruder:
https://m21.hyte.de/blog/Metallframe%20Extruder
[03:21:23] <John_F_> seb_kuzminsky: hi I have a 7i73 and a machine where my 24V supply is more like 25V do you know if the 7i73 can handle the extra input power?
[03:21:46] <John_F_> I mean 7I37
[03:22:38] <seb_kuzminsky> John_F_:
http://mesanet.com/pdf/parallel/7i37man.pdf
[03:23:03] <John_F_> yes it says max 24 V input resistors are 4.4 K
[03:23:18] <John_F_> about .13 W per resistor
[03:23:28] <John_F_> nothing about abs max ratings
[03:26:13] <John_F_> seb_kuzminsky: I just thought I would check to see if you knew any more or had any experience with slighlty higher than 24V
[03:26:53] <seb_kuzminsky> no idea, sorry :-/
[03:27:04] <seb_kuzminsky> pcw is the guy to ask, but he just left
[03:51:46] <jimbo655> I just had a talk with Peter at Mesa when I asked about the 7i37 he said up to 48 volts DC
[03:52:05] <SWPadnos> I think that's for the outputs
[03:52:11] <SWPadnos> dunno about the inputs
[03:52:44] <SWPadnos> I'm sure they'll handle 25V instead of 24V, but it wouldn't hurt to get it from the horse himself :)
[03:52:47] <SWPadnos> night all
[03:52:52] <jimbo655> If you are worried bout the inputs add a small 1 k resistor in series to limit the current.
[03:53:13] <jimbo655> about
[03:59:32] <jimbo655> The inputs feed a NEC PS2501 Opto coupler. So adding a 500 to 1 K resistor in series should do it if you are worried.
[05:51:11] <Goslowjimbo> I'm trying to load emc2-dev and build-dependencies on a computer without internet access. I need these files to use comp.
[05:52:13] <Goslowjimbo> I am sure there's instructions somewhere, but have only found instructions to load just emc2 on a remote computer.
[05:53:23] <Goslowjimbo> I have used synaptic to get the packages on this computer (somewhere), but don't know how to find them nor get them to the other computer.
[06:12:33] <Goslowjimbo> build-dependencies / build-essential. More tired than I thought.
[06:43:29] <f7ee> What is "glib" in "checking for glib... configure: error: no -- required until somebody makes modbus optional"
[06:46:12] <micges> f7ee: did you do 'sudo apt-get build-dep emc2' ?
[06:46:24] <f7ee> in kubuntu 9.04
[06:46:31] <f7ee> nope
[06:46:47] <f7ee> mic2I'm on usb flash in kubuntu 9.04
[06:47:15] <micges> oh
[06:48:05] <f7ee> Just... I have build-essential, libpth-dev, tk8.5-dev (provides tcl8.5-dev)... I need something like Glib, Glib.h or glx.h
[06:48:59] <micges> f7ee: glib-dev, glx-dev and such
[06:49:09] <f7ee> ok, wait
[06:50:52] <f7ee> glx-dev seems for Nvidia. I want to boot on ATI machine next time. I'm looking for some 'independent' glx.h, not this one "from/for Nvidia"
[06:53:26] <micges> bbl
[06:53:39] <f7ee> libglib2.0-dev seems nice
[06:55:10] <f7ee> and "mesa-common-dev"
[06:57:25] <f7ee> ok, it's ok! Now "bwidget"
[06:58:37] <f7ee> Now "readline". Everything's gonna be alright if Python-2.6.2 was compiled properly.
[07:03:32] <f7ee> No, rather "xorg-dev" for X Window System
[07:09:41] <f7ee> libreadline5-dev, xorg-dev or 'just' libxaw7-dev
[07:12:53] <f7ee> Well, it's close to my previous compilations.
[07:13:13] <f7ee> reconfiguring python
[07:13:41] <f7ee> python2.6.2, but can be 2.4. or 2.5. hope it's ok
[07:15:25] <f7ee> Do other Linux versions have files of same name as X11/../some-particularly-named-file?
[07:17:40] <f7ee> What is Error 127?
[07:20:49] <f7ee> Ok, I'm re4startin and install it to new system
[07:24:04] <hesperaux> Hello. =) I'm just getting into CNC/CAM stuff because I'm making my own mill. I'm about to compile EMC2 from git, but I don't know which configure options to use. What is "realtime" and do I need it?
[07:26:29] <micges> hesperaux: you need realtime kernel
[07:27:30] <micges> hesperaux:
http://www.linuxcnc.org/content/view/21/4/lang,en/
[07:40:35] <hesperaux> micges, is that the right link?
[07:40:39] <hesperaux> i don't see much on that page
[07:40:49] <hesperaux> and I'm not familiar with what a realtime kernel is
[07:41:37] <micges> on that page are instructions how to install realtime patched linux on your pc
[07:42:06] <hesperaux> all I see is Users, Developers, Board
[07:42:18] <hesperaux> and a few very generic paragraphs
[07:42:59] <hesperaux> wt...
[07:43:02] <micges> realtime is ubuntu linux distribution 8.04 with rtai patch compiled in
[07:43:05] <hesperaux> umm one sec
[07:43:17] <hesperaux> >_<
[07:43:21] <micges> this is correct link, check again
[07:43:34] <hesperaux> yeah i opened it again and now it works. not sure why. maybe opera cache. anyway
[07:43:59] <hesperaux> where is the kernel patch?
[07:44:07] <micges> compiled in
[07:44:10] <hesperaux> i use my own kernel (and definitely don't use ubuntu), so I can just patch that
[07:46:36] <alex_joni> hesperaux: www.rtai.org
[07:47:05] <alex_joni> there are lots of (more or less olser/stale) instructions how to patch around wiki.linuxcnc.org
[07:47:23] <hesperaux> okay, thanks
[07:47:39] <hesperaux> by the way, what is the difference between realtime and simulation?
[07:47:43] <micges> alex_joni: what version we use in 8.04 ?
[07:50:26] <hesperaux> there is no way to modularize this?
[07:50:27] <alex_joni> hesperaux: a realtime kernel contains another "OS" besides linux
[07:50:48] <alex_joni> the RTAI domain runs more deterministic, and is used by emc2 for precise timings
[07:50:50] <hesperaux> oh
[07:50:56] <alex_joni> for example to output step impulses
[07:51:03] <alex_joni> that can run up to 50kHz or so
[07:51:08] <hesperaux> tasty
[07:51:34] <alex_joni> yup, otoh if something is borked in the RTAI domain, linux will never come back to control the machine and you'll get a nice crash
[07:51:45] <hesperaux> awesome
[07:51:54] <hesperaux> so it sounds like rtai is a hypervisor, of sorts
[07:52:13] <alex_joni> actuall ADEOS/IPIPE is the "hypervisor"
[07:52:20] <alex_joni> RTAI and linux run under that
[07:52:28] <alex_joni> IPIPE stands for interrupt pipeline
[07:52:40] <hesperaux> i see
[07:52:59] <alex_joni> during RTAI execution you can't have interrupts wrecking your timing, so they get remembered and issued after RTAI finished doing it's thing
[07:53:12] <alex_joni> gotta run for a while.. bbl
[07:53:34] <hesperaux> i see
[09:28:36] <micges1> micges1 is now known as micges_plasma
[12:51:49] <cnc_> cnc_ is now known as Valen_cnc
[12:52:32] <Valen_cnc> going through the wiki entry at
http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?EMC_With_Custom_Kernel it seems to imply that i need to recompile emc with the new kernel?
[12:53:43] <Valen_cnc> there don't seem to be any patches made to emc itself however so i'm curious if its really necessary
[12:54:28] <SWPadnos> it is
[12:54:45] <Valen_cnc> :-<
[12:54:52] <Valen_cnc> I'll just use the debs then
[12:54:59] <SWPadnos> emc contains kernel modules with versioning, so you need to compile them (even though the source doesn't change)
[12:55:07] <SWPadnos> did you make your own RTAI kernel?
[12:55:26] <Valen_cnc> using the ones here
http://linuxcnc.org/experimental/hardy/smp/ I was hoping
[12:55:57] <SWPadnos> note the emc2_2.3.0... deb there
[12:56:01] <SWPadnos> install that one
[12:56:40] <Valen_cnc> the emc2-firmware-all does that have everything?
[12:56:56] <SWPadnos> no, the firmware ones are for Mesa FPGA firmware only
[12:57:01] <Valen_cnc> or do i need to install the specific ones
[12:57:05] <SWPadnos> http://linuxcnc.org/experimental/hardy/smp/emc2_2.3.0_i386.deb
[12:57:08] <Valen_cnc> yeah i am using mesa cards
[12:57:23] <SWPadnos> ok, then you can just download the one(s) you need
[12:57:31] <Valen_cnc> it just has an "all" and specific ones
[12:57:53] <Valen_cnc> should i uninstall all the existing emc stuff or is this regarded as an "upgrade"?
[12:58:15] <SWPadnos> the all depends on all the others I think
[12:58:25] <SWPadnos> so you would have to download all of them anyway
[12:58:27] <Valen_cnc> figured as much
[12:58:35] <Valen_cnc> i have a wget -r running at the moment
[12:58:35] <SWPadnos> it's only 19k
[12:58:41] <SWPadnos> ok, that can work
[12:58:53] <SWPadnos> it's a little more efficient for you to only install the firmware you need
[12:59:17] <Valen_cnc> save myself an entire mb of disk space?
[12:59:17] <SWPadnos> updates will not pull in everything then, only the ones you specifically installed
[12:59:39] <SWPadnos> save me a few MB of download bandwidth every time there's an update :)
[12:59:57] <Valen_cnc> if i'm using these customised versions though i won't be able to use the normal repos?
[13:00:15] <SWPadnos> well, it will be harder
[13:02:01] <Valen_cnc> so yeah the only remaning question is if i should remove the existing emc packages?
[13:02:34] <SWPadnos> dunno
[13:02:48] <SWPadnos> that seems the easiest way, but you'll still get nagged about available updates
[13:03:11] <SWPadnos> the SMP version is only 2.3.0, the latest released is 2.3.1, about to be 2.3.2
[13:03:22] <Valen_cnc> i'll disable the emc repos for that
[13:03:32] <jepler> you can build your own .deb against your own kernel and install that
[13:03:46] <SWPadnos> you will probably want the latest firmware, but you probably also want the driver updates
[13:04:03] <Valen_cnc> if i recompile with 2.3.2 that should "just work" with the smp?
[13:04:08] <jepler> debian/configure -r (configure to build packages for the running kernel), then dpkg-buildpackage -rfakeroot, then install the packages that are built in the parent directory
[13:04:26] <jepler> yes, get the source from git, or with apt-get source
[13:04:45] <jepler> bbl
[13:07:32] <Valen_cnc> git is probably "fresher"
[13:07:46] <Valen_cnc> and it'll need less bandwidth
[13:08:08] <Valen_cnc> problem for a later date i thinks
[13:08:33] <SWPadnos> git will remain up to date
[13:09:02] <SWPadnos> yes, it will be a big bandwidth savings, but it does use a few more MB of disk space :)
[13:09:44] <Valen_cnc> lol i like the wiki page suggesting the use of a 1.5Tb drive
[13:09:58] <SWPadnos> where is that?
[13:10:30] <Valen_cnc> A high capacity drive such as the now relatively inexpensive ones in the 500MB to 1.5 TB capacity will come in handy.
[13:10:59] <SWPadnos> 500MB is sure inexpensive, but 1.5TB?
[13:11:05] <Valen_cnc> hmmm max jitter on the base thread of 90645 is a bad thing :-<
[13:11:14] <SWPadnos> with Mesa?
[13:11:29] <Valen_cnc> I think you would have difficulty getting a 500mb drive that isn't flash these days
[13:11:35] <Valen_cnc> there is a mesa card in the system yes?
[13:11:41] <SWPadnos> no, they're available, in the $50 range
[13:12:05] <Valen_cnc> $50 should get you at least n 80Gb
[13:12:21] <SWPadnos> oh. here I was reading 500 GB :)
[13:12:30] <Valen_cnc> ahh lol yes
[13:12:54] <Valen_cnc> thats what i was saying about being hard to get ;->
[13:12:56] <SWPadnos> I don't think I've seen anything as small as an 80GB lately, except for laptop drives
[13:12:59] <SWPadnos> heh
[13:13:17] <Valen_cnc> so yeah 90K jitter is the sucky
[13:13:23] <SWPadnos> yeah, I haven't seen a sub-10GB drive in a very long time
[13:13:27] <Valen_cnc> i think it only happened once
[13:13:29] <SWPadnos> with Mesa, it might be OK
[13:13:47] <SWPadnos> but it would make me wonder if something worse will come along later
[13:13:49] <Valen_cnc> it'd be niceto have a histogram type function
[13:13:56] <SWPadnos> halscope
[13:14:08] <Valen_cnc> halscope can pickup jitter?
[13:14:22] <SWPadnos> it can if you use the latency test RT component :)
[13:14:32] <SWPadnos> like the latency-test does
[13:14:43] <Valen_cnc> too much for me lol
[13:14:54] <SWPadnos> halrun -I
[13:14:57] <Valen_cnc> I was thinking it might be a nice addition to latency-test
[13:15:02] <SWPadnos> loadrt latency(something or other)
[13:15:08] <SWPadnos> loadusr halscope
[13:15:14] <SWPadnos> make some threads and start them ...
[13:15:16] <SWPadnos> simple :)
[13:15:21] <Valen_cnc> .....sure
[13:15:40] <SWPadnos> well, you get a reset button and that's it :)
[13:16:09] <Valen_cnc> we'll see how i'm going in a few months when i have a bit more of a hang of things
[13:16:52] <Valen_cnc> it looks like the normal max jitter is in the 10k range rather than 90k
[13:17:19] <Valen_cnc> what was the reason behind not shipping the SMP stuff by default again?
[13:17:25] <SWPadnos> even 90k isn't catastrophic for a Mesa system - you don't need a base thread at all
[13:17:33] <SWPadnos> it doesn't always work
[13:17:45] <Valen_cnc> ahh, what causes it to fail?
[13:17:50] <SWPadnos> no idea
[13:17:59] <Valen_cnc> the servo system had about the same
[13:18:07] <Valen_cnc> servo thread
[13:18:11] <SWPadnos> bbiab
[13:35:43] <jepler> Valen_cnc: the first time we tried an smp kernel, we found at least one machine where it wouldn't boot at all, and more machines where it wouldn't run rtai because the machine didn't have an APIC or LAPIC
[13:36:30] <jepler> I dunno whether that is still true with the hardy kernel (this was in the days of breezy) but we are pretty conservative about what kernel we give users by default, and we only build packages for that kernel..
[13:37:38] <jepler> we're happy to accept volunteers to build packages, but it should be considered a long-term commitment
[14:19:10] <Valen_cnc> might be worth another round of testing perhaps? if smp works it might give a better experience "out of the box"
[14:19:20] <Valen_cnc> ok all downloaded now, lesse how it works
[14:19:33] <Valen_cnc> max jitter is ~15k now
[14:20:56] <Valen_cnc> (mono kernel)
[14:23:26] <Valen_cnc> the "servo" thread is what alters the pwm values on a mesa card yes?
[14:23:33] <SWPadnos> yes
[14:23:58] <SWPadnos> a base thread is generally not needed unless you have the CPU doing PWM or step generation
[14:24:05] <Valen_cnc> if so if you have a "low inertia" device (think linear motor driven would there be benifit to running the servo thread at a higher rate?
[14:24:13] <SWPadnos> probably
[14:24:45] <SWPadnos> are you using a PCI card or a 7i43 parallel-connected card?
[14:24:57] <Valen_cnc> pci 5i23
[14:25:17] <SWPadnos> ok, then you should be able to get up to around 5 kHz, latency dependent
[14:25:21] <SWPadnos> maybe faster
[14:25:28] <Valen_cnc> that would be good i thinks
[14:25:54] <Valen_cnc> might help with what happens when you come out the end of a one sided cut
[14:26:39] <SWPadnos> sure
[14:26:51] <Valen_cnc> I wonder if it might be worth putting some kind of shock absorber system on a mill like that, to help with vibration and the like
[14:27:11] <Valen_cnc> its better than just adding mass to the table, it seems more elegant
[14:27:22] <SWPadnos> vibration from cutter chatter?
[14:27:26] <SWPadnos> or what
[14:27:31] <Valen_cnc> from everything
[14:27:49] <SWPadnos> oh, well for that more mass is probably good :)
[14:28:07] <Valen_cnc> if its a linear motor driven thing theres nothing to counteract any sideways forces other than inertia
[14:28:22] <Valen_cnc> and the motor drive ;->
[14:28:29] <Valen_cnc> that was odd
[14:28:35] <SWPadnos> yeah, the drive/motor should be the main thing
[14:28:38] <Valen_cnc> it just installed the emc package
[14:28:47] <Valen_cnc> then played the ubuntu login sound
[14:29:10] <SWPadnos> that may also be your "completion" sound or something
[14:29:33] <Valen_cnc> didn't do it for any other package
[14:29:50] <Valen_cnc> oh well thats all installed
[14:30:00] <Valen_cnc> I'll edit grub and see what happens
[14:31:22] <Valen_cnc> brb
[14:31:25] <SWPadnos> see you
[14:34:33] <cnc_valen> hmmm
[14:34:37] <cnc_valen> lots worse
[14:34:41] <cnc_valen> ~30k
[14:35:08] <SWPadnos> that's not worse than 90k
[14:35:16] <cnc_valen> i think that was a once off
[14:35:31] <SWPadnos> therefore it will happen again
[14:35:39] <cnc_valen> it was sitting at 15k for about 15 minutes before the reboot
[14:35:52] <cnc_valen> now its sitting at 30k
[14:36:19] <SWPadnos> drag some windows around and run glxgears and stuff
[14:36:22] <SWPadnos> see what happens
[14:36:38] <cnc_valen> it was at 15k when it was installing the kernel etc
[14:36:44] <cnc_valen> it did that 100k spike
[14:36:54] <cnc_valen> then i reset it and did all the updates and installs
[14:37:04] <cnc_valen> losts of desktop switches
[14:37:30] <cnc_valen> Intel Corporation 82865G Integrated Graphics Controller
[14:37:33] <cnc_valen> thats the video
[14:38:08] <cnc_valen> hmm i wonder if its because this is a HT machine rather than true SMP
[14:38:30] <cnc_valen> I wouldnt have thaught a switch would add that much to the latency
[14:38:46] <cnc_valen> it does seem rather more volatile in terms of jitter, just looking at the numbers
[14:41:07] <cnc_valen> jitter is up to ~40K now
[14:42:18] <SWPadnos> oh. HT used to be terrible for RTAI
[14:42:34] <SWPadnos> it's apparently not so bad on some recent core2 or Atom boards though
[14:48:00] <cnc_valen> i'll just try again with the isolation off
[14:51:04] <cnc_valen> was a little better but died when there was disk activity
[14:51:37] <SWPadnos> what CPU are you using?
[14:51:50] <cnc_valen> P4 3ghz
[14:52:31] <SWPadnos> hmm
[14:53:05] <SWPadnos> I see that the names are ...i386..., bu tI could swear the kernels were compiled for something recent, like core2 or atom
[14:54:07] <cnc_valen> there are only a few optimisations like sse3 as far as i'm aware
[14:54:37] <SWPadnos> yeah, and probably some extra cache management instructions or something
[14:54:39] <cnc_valen> for core vs P4
[14:55:03] <cnc_valen> should cause segfaults etc if its not supported
[14:55:37] <SWPadnos> so when you said "died when there was disk activity", you meant that the latency increased at that point
[14:55:54] <cnc_valen> yeah
[14:55:59] <cnc_valen> started xchat
[14:56:17] <cnc_valen> sorry if that was fuzzy
[14:56:32] <SWPadnos> heh, np
[14:57:34] <cnc_valen> hmmm might have to try a true dual core machine
[14:57:59] <cnc_valen> i have an atom board around the place but i think its single core only
[14:58:48] <SWPadnos> I don't know of anyone who has tried a 230 board
[14:58:54] <SWPadnos> only the dual-core 330
[15:00:09] <cnc_valen> i have a dual xeon 3.06 sitting around doing nothing
[15:01:11] <cnc_valen> its noisy as all heck though and needs a really good power supply
[15:04:38] <cnc_valen> oh well i'll drop this back to single CPU it seems better on average and i'll try the dual Xeon
[15:04:47] <cnc_valen> twas a beasty machine that one
[15:04:56] <cnc_valen> 5+ years old now
[15:05:18] <cnc_valen> 2 actual cpu's none of this dual core wussiness
[15:05:54] <cnc_valen> anyway time for dinner and TV (via my quad core 2.6ghz tv computer lol, running myth)
[15:06:05] <cnc_valen> thanks for the help, i'll catch you later
[15:22:01] <geo01005> so is there a cheap video card I can put in a ecs goal3+ motherboard that dosen't require additional drivers?
[15:23:48] <geo01005> or will just about any pci-e video card work?
[15:27:40] <Jymmm> LlllllleeeeeeEEEETS GET READY TO RUMBLLLLLLLLLLLLLEEE! (R)
[15:29:37] <bill2or3> * bill2or3 prepares his rumbling equipment.
[15:29:53] <Jymmm> lol
[15:32:39] <hugomatic> Hi, I'm thinking of building a simulation version of Emc on my laptop. Right now, it has 32 bit Intrepid (8.10) but I could upgrade to 9.04. I did not find any docs about this on the wiki. Is this a good idea?
[15:33:15] <bill2or3> the quickstart docs say not to, but I think that's just becuase the existing debs were compiled on 8.04.
[15:33:29] <bill2or3> so you'd have to compile your own emc on 9.04.
[15:34:34] <hugomatic> I think I need to compile it anyways, since I need the --enable-simulator options. However, if there are conflicts with the Ubuntu packages in 8.10 or 9.04, I will not try it
[15:34:58] <bill2or3> I dont know of any conflicts.
[15:35:15] <hugomatic> thank you...
[15:41:33] <anonimas1> 3
[15:44:52] <SWPadnos> hugomatic, there are no 8.10 or 9.04 packages (AFAIK), so there should be no conflicts there
[15:45:15] <SWPadnos> what will be a little harder is installing all the build dependencies, since you can't use apt for that
[15:45:54] <SWPadnos> you'll have to look at the control.in (I think) file in the debian/ dir, and manually install all the packages needed to build
[15:48:21] <bill2or3> the install-emc.sh script fetches a bunch of debs, you could look at those and install that stuff manually.
[15:48:58] <SWPadnos> it only explicitly installs emc2
[15:49:02] <SWPadnos> plus recommends
[15:50:42] <bill2or3> oh yeah, I see that the dependencies aren't explicitly installed.
[15:51:08] <SWPadnos> that't he magic of apt :)
[15:51:11] <SWPadnos> that's the
[15:52:07] <bill2or3> indeed.
[16:15:32] <roh> jepler yay... my board works. means your stuff still works (when one fixes the arduino makefiles *sigh)
[16:20:16] <bill2or3> what're you using an arduino for?
[16:24:56] <jepler> bill2or3: hal non-realtime I/O including pwm and adc
[16:25:31] <jepler> http://emergent.unpy.net/01198594294
[16:26:16] <bill2or3> for something like a reprap extruder?
[16:26:22] <jepler> I think that's roh's project
[16:26:28] <jepler> I originally wrote it for no specific purpose
[16:27:24] <bill2or3> ahh. I think it's good to take advantage of 'commodity' hardware wherever possible.
[16:27:28] <bill2or3> cheap, and all that.
[16:28:59] <Jymmm> jepler: Do I need to say it?
[16:44:13] <geo01005> seb_kuzminsky: How are you doing?
[16:46:14] <Spida> which interface-card/driver-board can I use for a 3-axis home-built mill with steppers when I want to avoid parallel ports (I guess I have to use PCI then...)?
[16:48:44] <seb_kuzminsky> hi geo01005
[16:48:59] <geo01005> Spida:
http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?EMC2_Supported_Hardware
[16:49:31] <geo01005> Seb_kuzminsky: Been a busy summer?
[16:49:57] <seb_kuzminsky> yeah, no spi development yet...
[16:50:12] <geo01005> I wasn't going to ask :)
[16:50:21] <seb_kuzminsky> heh
[16:50:41] <seb_kuzminsky> but on the other hand, hm2 stepgen is now not totally full of bugs :-)
[16:50:53] <geo01005> that is very good :)
[16:51:08] <geo01005> are there any bugs left in hm2 stepgen?
[16:51:25] <seb_kuzminsky> none known at this time
[16:52:27] <geo01005> good, cause I going to use it.
[16:52:39] <seb_kuzminsky> great!
[16:54:39] <geo01005> I'm guessing you haven't been able to work on your mill conversion?
[16:55:37] <seb_kuzminsky> yeah not really... i made a couple of the parts, but there's still a long way before i can start bolting stuff on :-/
[16:56:28] <seb_kuzminsky> how's your reprap coming?
[16:56:39] <bill2or3> I've just been reading the stepconf.pdf section about limit switches, is there a longer discussion of step vs. limit vs. both I can read?
[16:57:00] <bill2or3> (short question: how many switches do I want to wire per axis?)
[16:58:03] <geo01005> seb_kuzminsky: I haven't worked on my reprap for a while now, about a month, I got myself into a CAD software project...
http://code.google.com/p/sketchsolve/
[16:59:06] <geo01005> bill20r3, step vs. limit?
[16:59:31] <bill2or3> err, home vs. limit, sorry
[16:59:32] <geo01005> I think you need encoders to do anything more than limit switches.
[16:59:57] <seb_kuzminsky> nifty, geo01005
[17:00:04] <geo01005> Oh, you can have a switch for each..
[17:00:23] <bill2or3> so a limit switch at both ends of each axis? (and wire the ends in series, so it uses 2 parport inputs total?)
[17:01:11] <geo01005> perhaps I'm not the best person to chime in about limits/home switches...
[17:01:31] <bill2or3> heh.
[17:01:39] <Spida> geo01005: so a mesa anything-io 5i23 with hostmot2 would be a good choice?
[17:02:16] <bill2or3> I guess I'll go with 6 switches, wired 3 in series.
[17:02:57] <geo01005> Spida, depends on what you are planning on doing and how many I/O you need, I love the mesa boards.
[17:05:34] <Spida> geo01005: three axis * (stepper + end-switches + encoders) + e-stop + something for manually jogging...
[17:05:40] <geo01005> I think the 5i2x boards are great.
[17:05:57] <Spida> geo01005: I shouldn't reach the 72 pins of a mesa5i23 with that, would I?
[17:07:17] <geo01005> Spida, probably not. I think it would also be worth it to pay the extra 30 bucks for the 5i23 rather than the 5i20.
[17:08:37] <Spida> I thought so, but if you are using it I would like to hear your opinion/experience why the larger card is worth the extra bucks
[17:09:58] <SWPadnos> there are a couple of reasons
[17:10:08] <geo01005> Seb_kuzminsky, aren't some of the firmwares for the 5i2x boards only available with the 400K gate 5i23?
[17:10:21] <SWPadnos> 1) more gates = more expandability later
[17:10:52] <SWPadnos> 2) it's a later generation of the Spartan line (Spartan 3 vs. Spartan 2), and it can run higher clock rates
[17:11:58] <SWPadnos> 3) because it's a later generation, it will probably be supported by the Xilinx free tools for longer (they usually drop off old lines and delay adding support for new lines so they can sell more of their paid-for software)
[17:12:20] <seb_kuzminsky> the 5i20 and 5i23 currently support all the same firmwares: the top 200K gates of the 5i23 are not used, and any higher speed it supports is also not used currently
[17:12:43] <SWPadnos> if the smaller FPGA can do everything you want, at the speed you want, and you have no desire to ever use a bitfile that was not generated by Mesa, then you should get the 5i20
[17:12:44] <seb_kuzminsky> the 5i23 has a better pci chipset which is capable of dma, if the driver ever gets updated to use it
[17:12:56] <SWPadnos> oh - forgot about that one :)
[17:14:33] <Spida> ah, ok
[17:14:48] <Spida> not just more gates.
[17:15:05] <SWPadnos> bill2or3, sharing limit switches is possible, but may cause annoyances
[17:15:17] <SWPadnos> like getting 3 limit switch errors every time any one axis actually hits a limit
[17:15:33] <Spida> are there any alternatives to the mesa boards if I want to avoid "legacy" ports like parallel or serial?
[17:15:43] <SWPadnos> steppers or servos?
[17:15:51] <seb_kuzminsky> Spida: the 5iXX series of boards all use PCI, not parallel
[17:16:05] <bill2or3> ah, I can see how that'd be annoying.
[17:16:11] <SWPadnos> I think he's asking about alternatives that also use PCI
[17:16:19] <SWPadnos> like Motenc and STG
[17:16:21] <seb_kuzminsky> oh, right
[17:16:23] <Spida> probably steppers, but I am open to suggestions, if somebody tells me why I should use servos....
[17:16:34] <SWPadnos> because they're better, of course :)
[17:16:37] <geo01005> servos are awesome :)
[17:16:45] <Spida> in what respect?
[17:16:53] <bill2or3> can I share an input between both switches on an axis? Will emc figure out which switch it hit, based on which direction it was moving at the time?
[17:16:54] <SWPadnos> if you want to use steppers, I think the Mesa cards are your only option
[17:16:55] <seb_kuzminsky> i like that servos are closed loop, so you know if your machine is misbehaving
[17:16:57] <geo01005> the awsomness.
[17:17:37] <SWPadnos> servos are closed loop, and have much higher dynamic range (high or low speeds act the same)
[17:17:42] <geo01005> servos also can go faster, have a high.
[17:17:49] <Spida> seb_kuzminsky: I would know that too, if my steppers had encoders...
[17:17:51] <SWPadnos> bill2or3, you can share, but EMC will not know which switch was hit (it sees both)
[17:18:14] <SWPadnos> which is good - what if a wire got crossed and the motor went the wrong way (but EMC didn't know)
[17:18:16] <Spida> how are steppers vs servos precision-wise?
[17:18:17] <seb_kuzminsky> Spida: yes, if you turn your steppers into low-end servos, then they'd act like servos ;-)
[17:18:47] <bill2or3> I guess if you hit a limit switch something went horribly wrong.
[17:18:53] <SWPadnos> encoders on steppers don't generally give you servo-type control, they can provide traveling following error detection at best
[17:18:56] <geo01005> seb, has anybody done that with EMC yet?
[17:19:10] <seb_kuzminsky> geo01005: sort of
[17:19:14] <seb_kuzminsky> hold on let me dig up the link
[17:19:25] <SWPadnos> geo01005, someone recently posted a video of their stepper machine with linear scales
[17:19:37] <Spida> I am thinking about using the mill for circuit-boards, and the stuff I am doing now has 0,2mm wires and spacings, so I guess I should have better than 0,1mm precision...
[17:19:39] <seb_kuzminsky> http://www.linuxcnc.org/component/option,com_kunena/Itemid,20/func,view/catid,10/id,223/lang,en/
[17:19:43] <SWPadnos> I think they're using the stepgens (Mesa) in velocity mode
[17:19:51] <geo01005> huh, that is cool, I wonder how it compares to these?
http://www.qcontrol.com/
[17:19:58] <seb_kuzminsky> yes, same guy i just linked to
[17:20:06] <SWPadnos> Spida, probably 10x the end resolution you want
[17:20:21] <seb_kuzminsky> his video is near the end of the thread, after we convinced him to use velocity mode
[17:20:22] <SWPadnos> so if you want 0.2mm accuracy, you should have 0.02mm resolution
[17:22:39] <geo01005> those qcontrol drive actually do commutation of the stepper though (I think).
[17:23:49] <SWPadnos> those are pretty expensive
[17:24:02] <SWPadnos> and they don't eliminate the problem of decreased torque at higher speeds
[17:24:16] <SWPadnos> that's intrinsic to a stepper, regardless of how they're driven
[17:25:02] <Spida> I know servos only from rc-models, are we talking about similar stuff here?
[17:25:09] <SWPadnos> no
[17:25:28] <geo01005> Yes, I would much rather have a brushless servo drive rather than the qcontrol drives, just though it was interesting.
[17:25:56] <geo01005> Servo simplify implies feedback...
[17:30:32] <geo01005> hmm, I'm home now... that is odd, I'm sitting right here in my work chair...
[17:31:06] <skunkworks> heh
[17:31:23] <skunkworks> someone is playing with your computer at home!
[17:32:40] <geo01005> could be the down stairs neighbors, sometimes there music is loud enough to move my mouse and turn on the computer.
[17:38:17] <geo01005> anybody know of a good(free) way to access a XP home computer remotely from behind a firewall?
[17:38:57] <alex_joni> you need port forwarding on your router
[17:39:00] <seb_kuzminsky> convert the XP machine to a kvm vm and put it on your laptop
[17:39:05] <skunkworks> yes - then remote desktop.
[17:40:57] <geo01005> I was thinking of some of these services like "goto my pc"
[17:43:09] <skunkworks> do you want to pay for it?
[17:43:23] <geo01005> Not really.
[17:46:14] <skunkworks> then open a port on your firewall and use remote desktop. (and hope you have strong passwords and patched) ;)
http://www.windowsnetworking.com/articles_tutorials/wxprmdtp.html
[17:47:21] <geo01005> yeah, it is home edition, so no remote desktop...stupid microsoft.
[17:47:55] <geo01005> I suppose I could do something similar with ultra VNC
[17:48:24] <skunkworks> really? I thought it did. hmm
[17:48:32] <alex_joni> it only has invite mode
[17:48:39] <skunkworks> I have used tightvnc on a local network
[17:48:49] <alex_joni> xp home I mean
[17:48:49] <skunkworks> yeck
[17:49:45] <geo01005> Well maybe it just isn't worth it.
[17:49:53] <seb_kuzminsky> XP? yeah
[17:49:54] <Spida> haven't used any MS-Stuff in years. such things are so much easier on linux.
[17:49:57] <seb_kuzminsky> :-P
[17:51:09] <geo01005> hey, maybe we could get EMC to run on windows7 ;)
[17:51:34] <skunkworks> well - it started out on windows nt...
[17:51:50] <SWPadnos> no it didn't
[17:51:52] <geo01005> it is easy, just get the windows 7 DVD and shove it under your emc box.
[17:52:04] <geo01005> Then emc is running on windows 7.
[17:52:08] <skunkworks> SWPadnos: no?
[17:52:09] <SWPadnos> AFAIK you could never run a machine on NT, only the UI
[17:52:14] <Spida> geo01005: *g*
[17:52:16] <SWPadnos> it started out on VXWorks
[17:52:26] <anonimas1> there are hard realtime for windows nt
[17:52:48] <anonimas1> for process control
[17:52:48] <anonimas1> :)
[17:52:52] <SWPadnos> there are now, but there weren't in the mid '90s
[17:53:26] <SWPadnos> even VXWorks wasn't used for the actual servo control, that was done on a motion control board with its own DSP
[17:53:54] <kcummins> * kcummins is suffering from cranial meltdown, trying to learn and understand electronics...
[17:54:08] <f7ee> Help me with
http://paste.org/8587 I think I need to compile Python-2.5
[17:54:26] <L84Supper> hehe EMC on anything windows is fine if you don't care about reliability or fixing anything that's broken
[17:54:43] <skunkworks> SWPadnos: you are right -
http://www.isd.mel.nist.gov/projects/_emc/emcsoft.html
[17:54:56] <skunkworks> I thought for some reason the k&t was running windows.
[17:55:06] <SWPadnos> heh
[17:55:18] <SWPadnos> remember, I did a presentation on the history of the project last year :)
[17:55:35] <skunkworks> :)
[17:56:22] <skunkworks> can you spot matt? :)
[17:56:39] <cradek> no, all I see is some young guy who must work for him
[17:56:50] <L84Supper> thats why they run Windows on our voting machines
[17:58:17] <f7ee> I have libpth-dev tk8.5-dev libglib2.0-dev bwidget libxaw7-dev python2.5-dev, python-all-dev , libglu1-mesa-dev, mesa-common-dev, libreadline5-dev, and build-essential. It's almost done! I want to add it to
[17:58:17] <f7ee> Wiki but command 'make' returns an error. I think the problem is somewhere at python modules, which should (should they?? be compiled from source... I need help with it. Today.
[17:58:45] <cradek> ???
[17:58:48] <alex_joni> f7ee: now why would he leave?
[17:58:57] <alex_joni> f7ee: you need to install freetype fonts
[17:59:10] <f7ee> alex_joni: ok
[17:59:14] <alex_joni> I think -lXft stands for Xfonts or such
[17:59:26] <alex_joni> XFreeType
[18:00:31] <f7ee> ok
[18:04:23] <motioncontrol> good evening.I have a questions about the possible open the message window when the condition in classicladder is on, type hal_manualtoolcange window.Is possible create a open the window with message text for allarm in plc classicladder.thanks?
[18:05:41] <f7ee> ... My system has no that... Truetype font or what does its name? truetype?
[18:06:01] <kcummins> Is current additive in parallel? i.e., 3 motors hooked up to one PS draws 3x the current of one motor (if all motors are energized equally)?
[18:06:36] <kcummins> Sorry for the H/W question, my coffee level is low and my brain is foggy and demanding an answer... :)
[18:07:13] <cradek> kcummins: yes
[18:08:12] <kcummins> That's what I thought... And I should account for per phase current? i.e., 2phase @ 1.4A = 2.8A potential draw.
[18:09:46] <cradek> that I don't know
[18:11:31] <kcummins> I suppose I should, if both phases are fully energized. Might be different with a 5-phase motor...
[18:11:46] <alex_joni> kcummins: it depends on the motor driver, but as a rule of thumb you should scale for at least (N+1) * max current
[18:12:30] <alex_joni> motioncontrol: so you want classicladder to change a pin, which will cause an emc2 error reported in the interface?
[18:12:36] <alex_joni> I don't think you can do that right now
[18:12:42] <kcummins> alex_joni: Thanks...
[18:13:35] <motioncontrol> good evening alex.yes i want create a windows with text when a pin in classicladder is on
[18:13:57] <motioncontrol> for allarm and message maschine
[18:15:09] <motioncontrol> example if i write in mdi the m6t1 the emc load the python module :hal_manualtoolchange
[18:15:35] <alex_joni> motioncontrol: all I can think of is to make a component which talks NML (to send EMC_OPERATOR_MSG or whatever that message name is)
[18:15:44] <alex_joni> and has a hal pin, which you connect to the error pin
[18:17:10] <motioncontrol> yes i thing your ideas is correct, you thing can help me?
[18:18:23] <alex_joni> motioncontrol: don't think that more than that :/
[18:18:26] <motioncontrol> if more simple is possible create more python module and create a script for selection the python module association for pin
[18:18:39] <alex_joni> it's probably faster with python
[18:18:48] <alex_joni> but I don't know enough to help
[18:21:52] <f7ee> alex_joni: xorg-dev (and therefore xserver-xorg-dev)
[18:22:00] <motioncontrol> ok thanks alex.i go in ro 2 week after. is can meeting with you?
[18:22:17] <f7ee> alex_joni: ...which go with lotc of x11-proto-... files
[18:22:27] <alex_joni> f7ee: I doubt there are fonts things in there
[18:23:30] <f7ee> alex_joni: it's work as sim mode!
[18:24:01] <f7ee> I'm on Kubuntu 9.04 with all those ubuntustudio-... metapackages and emc2-sim!
[18:24:08] <alex_joni> ok.. then it sounds ok
[18:24:25] <f7ee> I will check all necessary files and add it to wiki next time
[18:25:00] <f7ee> I don't sleep 26th or 27th hour...
[18:26:21] <f7ee> How does LiveCD support USB Flash memory if it's in RTAI mode?
[18:27:59] <alex_joni> regular
[18:28:08] <alex_joni> RTAI doesn't care about the USB flash
[18:28:17] <alex_joni> the OS (linux) cares about where it's started
[18:28:26] <f7ee> but RTAI kernel doesn't support USB ports, right?
[18:28:32] <alex_joni> right
[18:28:36] <f7ee> and?
[18:28:39] <alex_joni> well.. not really
[18:28:44] <alex_joni> RTAI doesn't support USB ports
[18:28:50] <f7ee> oh, ok, programming thingies.
[18:28:58] <alex_joni> but the linux kernel (even if patched with RTAI) does
[18:29:09] <alex_joni> there are basicly 2 different operating systems working on your PC
[18:29:13] <alex_joni> the RT one, and linux
[18:29:28] <alex_joni> they work in parallel, in time-sharing
[18:29:47] <f7ee> ok
[18:29:50] <skunkworks> some motherboards have latency issues with usb thumb drives plugged in. Some don't
[18:29:58] <alex_joni> that's true..
[18:30:18] <alex_joni> usually most issues appear when plugging/unplugging though
[18:30:25] <skunkworks> yes
[18:30:56] <alex_joni> so booting from one might not have the problems, but it's a "needs to be tested" situation
[18:34:45] <f7ee> Ok, tomorrow I'll boot from cd and "sudo ... ... ..." all these packages to check if this list for compilation of emc2-simulator in plain kubuntu 9.04 is right.
[18:34:57] <f7ee> And add it to Wiki
[18:35:22] <alex_joni> sounds good
[18:36:16] <motioncontrol> alex where is call at python module the hal_manualtoolchange?
[18:37:04] <motioncontrol> interp_ceck.cc?
[18:37:20] <f7ee> Can you advice some free DXF-to-CNC converter except "2008-07-27-dxf2gcode_v01_src.zip"
[18:38:39] <geo01005> f7ee, try HeeksCAD.
[18:38:55] <archivist> f7ee, you could help test HeeksCNC
[18:38:58] <geo01005> http://code.google.com/p/heekscad/
[18:40:35] <geo01005> Sorry, yeah HeeksCNC
http://code.google.com/p/heekscnc/
[18:42:10] <f7ee> archivist: I don't know G-code at all.
[18:42:20] <f7ee> but I will help
[18:42:44] <alex_joni> motioncontrol: no, emc2 only talks to hal_manualtoolchange using iocontrol pins
[18:42:49] <alex_joni> tool-prepare, tool-prepared
[18:43:06] <alex_joni> tool-change, tool-changed
[18:45:46] <motioncontrol> i don't understan the fuction.tool-prepare as a pin.in some part the code when the tool-prepare pin is on load the python moule.i thing the python module call only when pin tool-prepare is on .ù
[18:55:09] <motioncontrol> i undertsand.the python module load at start the ini.file.in python code the hal_manualchange is call the pin tool -prepare is ok?
[18:57:39] <geo01005> motioncontrol, try:
http://www.linuxcnc.org/docview/html//hal_halmodule.html
[18:59:38] <motioncontrol> thanks geo01005 i read the doc.
[19:02:17] <cradek> can thin polycarb (1/8 or less) be bent much without cracking/crazing?
[19:02:51] <cradek> I need to bend a sheet around a 3' (1m) or so diameter
[19:02:59] <archivist> cradek, heat , just the right much though
[19:03:24] <cradek> I know plexiglas will heat and bend nicely - polycarb does too?
[19:03:41] <cradek> (plexi = lexan?)
[19:03:43] <archivist> do you have some scrap to try?
[19:03:50] <cradek> no
[19:03:57] <cradek> otherwise I wouldn't be asking :-)
[19:04:06] <archivist> hmm ask the makers then
[19:04:08] <cradek> it's somewhat expensive, but I'd prefer poly for safety
[19:04:09] <Jymmm> cradek: You'll need some clamps to hold it's shape till it cools
[19:04:26] <cradek> Jymmm: so you have bent polycarbonate with heat?
[19:05:30] <cradek> http://www.cloudtops.com/polycarbonate_verolite_physical_properties.htm
[19:06:06] <Jymmm> Drape forming: Simple contours can be achieved by drape forming polycarbonate sheet. The sheet should be pre-dried, then brought to a forming temperature of 325F to 340F in the oven. Parts are then removed and placed immediately over a male mold covered with felt. This method is utilized to manufacture face shields or any other part requiring a simple radius curvature. Brake forming: Br
[19:07:06] <Jymmm> http://www.plasticsmachining.com/magazine/199609/polycarbonate.html
[19:07:31] <Jymmm> cradek: It says you need to pre-dry it before heat forming it
[19:07:47] <cradek> good find, thanks
[19:08:05] <cradek> seems like 1/8 sheet *might* bend ok at this radius - it is close
[19:08:18] <Jymmm> cradek: pre-drying isn't a towel, it's a long time in the oven
[19:08:32] <archivist> hot air gun to stress relieve maybe
[19:08:33] <Jymmm> removing moisure in the material
[19:09:00] <Jymmm> pre-drying is like 4 to 8 hours in a moderate temp oven
[19:09:29] <Jymmm> it's to help prevent glazing (frosting) of the material iirc
[19:09:52] <cradek> in this application it doesn't have to be optically perfect - just "pretty clear" is good enough
[19:09:53] <f7ee> I've installed HeeksCNC to "kubuntustudio" on USB Flash next to EMC2 --sim --in-place
[19:10:20] <Jymmm> cradek: Has it been humid where you are the past week or so?
[19:10:28] <f7ee> QCAD + HeeksCNC = FOSSoftware for engineer.
[19:10:48] <cradek> yep
[19:11:19] <Jymmm> cradek: You might sit it sun flat for a bit
[19:11:35] <Jymmm> by bit a couple hours
[19:12:36] <Jymmm> cradek: It also mentions using felt as a barrier
[19:12:57] <Jymmm> cradek: Fleece might do as well (like a fleece blanket)
[19:13:44] <Jymmm> cradek: It's so it doens't pick up patterns in the sheet surface
[19:13:52] <Spida> f7ee: brlcad, too.
[19:15:00] <archivist> no cam in brlcad
[19:16:21] <Jymmm> cradek: Yeow pre-drying @ 250F eeeesh
[19:17:45] <Spida> archivist: no, but in combination with heekscnc oder gcadcam...?
[19:18:22] <archivist> heeks can import dxf
[19:18:44] <f7ee> Spida: yeah. and CAELinux.org with its LiveDVD, which is full of programs. Salome seems easy-to-learn. Code-aster.org seems hard-to-understand program
[19:19:26] <Jymmm> cradek: I think your biggest issue is going to be clamping it place till it's cool again. You don't have *that* long on a envelope to form it. But once you do you need some way to hold it in place for at least 20 - 40 minutes
[19:20:07] <Jymmm> cradek: It'll still be hot, but should hold it's shape for the most part.
[19:20:49] <f7ee> LyX or OpenOffice.org - Formula ??
[19:20:51] <Jymmm> cradek: Do you have any flanges?
[19:21:05] <f7ee> I haven't seen Formula at repos...
[19:29:36] <stuste1> I get the message 'defaulting to local storage area' when I try to git on 6.06
[19:29:50] <alex_joni> stuste1: what git version?
[19:30:08] <stuste1> don't know - I will look
[19:30:23] <alex_joni> there is 1.6.something in our repo at linuxcnc.org (in emc2.3)
[19:30:54] <stuste1> 1.1.3
[19:31:47] <stuste1> this is the version Synaptic brings down
[19:31:57] <alex_joni> might be a different git
[19:32:35] <Jymmm> cradek: OH... Since it's such a huge diameter, take into account thermal expansion once it has cooled it'll shrink
[19:34:42] <Jymmm> cradek: So leave somewhat of an overlap (if you're making a perfect circle), then once it's cooled, you can score-and-snap (can be tricky) or use a skill saw to remove the excess.
[19:39:01] <Jymmm> cradek: I use one of these when working with plastics...
http://www.toolbarn.com/product/makita/5090D/
[19:39:14] <Jymmm> super thin blade
[19:42:56] <stuste1> alex_joni: it says - 'content addressable filesystem'
[19:43:43] <stuste1> do I need to download and install a newer version?
[19:44:12] <alex_joni> it's something else
[19:44:16] <alex_joni> you need git-core iirc
[19:44:45] <alex_joni> http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?Git#Install_git_on_your_system
[19:44:56] <alex_joni> "In the package manager, select the package "git-core" (the package "git" is an unrelated program; don't choose it). Optionally, select "gitk" or "qgit" (not on Dapper) to graphically view project history, and "git-gui" to graphically select files to commit."
[19:45:22] <stuste1> the pick was 'git-core' and 'gitk' - 'git-gui' is not available
[19:46:14] <cradek> is it dapper?
[19:46:58] <alex_joni> cradek: yup
[19:47:02] <stuste1> yes - I just read the link Alex sent
[19:47:15] <stuste1> I will try to follow it :) thanks
[19:47:41] <cradek> the linuxcnc git1.6 packages for dapper are in the emc2.3 and emc2.3-sim repositories
[19:47:51] <cradek> if you don't have one of those enabled, you'll get the old unusable ones
[19:49:04] <Jymmm> Package: git-core
[19:49:04] <Jymmm> Versions:
[19:49:04] <Jymmm> 1:1.5.6.3-1.1ubuntu2.1
[19:49:17] <cradek> that's not dapper
[19:49:48] <Jymmm> what version is dapper?
[19:49:54] <Jymmm> I hate ubuntu codenames
[19:51:57] <Jymmm> intrepend?
[19:52:05] <Jymmm> intrepid
[19:54:20] <Goslowjimbo> I need to put emc2-dev and build-essential on the computer in my shed. It's about 2 miles from the internet.
[19:55:19] <archivist> bring the computer to the web for feeding
[19:55:22] <Goslowjimbo> I got the packages stored on this computer (I think), and saved them off to a USB stick. THey were in /var/cache/apt/archives.
[19:55:46] <cradek> build-essential is a metapackage that will pull in lots of others
[19:56:07] <Goslowjimbo> If I execute these on the other computer, will it load the packages on it without internet?
[19:56:34] <Goslowjimbo> So I need a list of others that it pulls in.
[19:57:08] <cradek> apt-get --print-uris install build-essential emc2-dev
[19:57:23] <cradek> then get each file listed, take them to the other computer, dpkg -i [all of them]
[19:58:20] <Goslowjimbo> OK. Thanks.
[19:58:57] <alex_joni> Jymmm: dapper drake was 6.06
[19:59:42] <Goslowjimbo> Do I do the same thing to build-essential? or does this include build-essential?
[20:01:30] <Goslowjimbo> Uh Oh. THis relies on this computer not already having emc2-dev. It says it is already built.
[20:02:01] <cradek> the idea is you'd run that on the other computer, and it would tell you everything it needs
[20:02:25] <cradek> because there's no way to know what it has installed and not
[20:02:41] <Goslowjimbo> Oh.
[20:02:58] <jepler> http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?UpdatingTo2.3
[20:03:03] <jepler> here's a list that is applicable if you have 2.3
[20:03:05] <EbiDK> EbiDK is now known as EbiDK|AWAY
[20:03:16] <jepler> probably it's close enough right except for the specific emc-dev package name if you're using 2.2
[20:03:19] <Goslowjimbo> Good, I do.
[20:03:24] <cradek> oh hey
[20:03:31] <cradek> jepler to the rescue
[20:03:40] <jepler> I am the linuxcnc.org wiki search engine
[20:04:07] <kcummins> * kcummins used to be the Human Grep in college...
[20:04:21] <jepler> aka synapster
[20:04:54] <archivist> * archivist stores it in a bot database why waste grey matter
[20:11:33] <Goslowjimbo> there's a linux-libc-dev that doesn't exist.
[20:28:53] <Goslowjimbo> jepler: what search phrase did you use to find the Wiki? I couldn't find that last night.
[20:33:01] <Jymmm> alex_joni: Ah ok
[20:36:46] <jepler> Goslowjimbo: I knew the right URL mostly from memory, and then firefox gave me the exact url as I typed part of it in..
[20:37:33] <jepler> if a specific package is now missing, it's probably because ubuntu did an update of it and changed the version number. unfortunately, they don't leave the old ones.
[20:38:35] <jepler> knowing the package name (the part after the last / and before the next _) go to packages.ubuntu.com, "search the package directories", enter the package name under 'search package directories', and be sure to change the Distribution to Hardy. Then click Search
[20:39:24] <jepler> the next page should offer you a working download link to an i386.deb or all.deb
[20:39:28] <jepler> http://packages.ubuntu.com/hardy/i386/linux-libc-dev/download
[20:39:52] <jepler> looks like it had a security bugfix around march ..
[20:40:16] <Roguish_> Roguish_ is now known as Roguish
[20:41:11] <Jymmm> cradek: what are you wrapping in plastic?
[21:12:45] <geo01005> Anybody know of some good sources for touch screens?
[21:13:12] <Jymmm> ebay
[21:13:38] <Jymmm> or the new asus all in one
[21:13:49] <archivist> I wonder about the PC and touchscreen the use for tills
[21:13:52] <SWPadnos> good or inexpensive?
[21:14:10] <Jymmm> tills?
[21:14:27] <Jymmm> is that like cousin to tribbles?
[21:14:46] <SWPadnos> no, it's the name for cash drawers
[21:14:57] <Jymmm> POS
[21:15:00] <SWPadnos> yes
[21:15:07] <Jymmm> http://www.amazon.com/Nokia-DKU-5-Cable-2115i-2116i/dp/B000DZUJ9Y
[21:15:23] <geo01005> Good but affordable $500-$1000.
[21:15:27] <SWPadnos> they often call the cash you get at the beginning of your shift "the till"
[21:15:41] <SWPadnos> you can get them new for that price, even at NewEgg (I think)
[21:15:56] <SWPadnos> just not complete PC+display+touchscreen dealies
[21:16:13] <Jymmm> http://www.newegg.com/Product/Product.aspx?Item=N82E16883220008
[21:16:20] <Jymmm> $500
[21:16:33] <geo01005> I should have said industrial touch screen.
[21:16:39] <SWPadnos> heh
[21:16:48] <Jymmm> wrap it in duct tape for industrial usage
[21:16:54] <geo01005> :)
[21:17:00] <SWPadnos> that one isn't a bad thing, except for whatever will happen to it when it gets hit with hot oil and chips
[21:17:24] <Jymmm> SWPadnos: wrap it in duct tape for industrial usage
[21:17:35] <SWPadnos> yes, I saw that solution
[21:17:51] <Jymmm> might be able to use peel-n-stick sheeting too
[21:18:02] <SWPadnos> http://www.newegg.com/Product/ProductList.aspx?Submit=ENE&DEPA=0&Order=BESTMATCH&Description=touchscreen&x=0&y=0
[21:18:06] <Jymmm> just like cleanrooms and nascar windshields
[21:18:38] <geo01005> The second one looks nice.
[21:19:23] <geo01005> sort of.
[21:19:47] <SWPadnos> http://www.newegg.com/Product/ProductList.aspx?Submit=Property&Subcategory=514&Description=&Type=&N=2000190514&srchInDesc=&MinPrice=&MaxPrice=&OEMMark=1&OEMMark=0&PropertyCodeValue=1099%3A9234&PropertyCodeValue=1099%3A9237
[21:20:10] <SWPadnos> ordered by price, only monitors with 1024x768 or 1280x1024 resolution
[21:20:48] <geo01005> why only 1024x768 or 1280x1024?
[21:20:56] <SWPadnos> because the other option was 800x600
[21:21:05] <SWPadnos> http://www.newegg.com/Product/Product.aspx?Item=N82E16824016123
[21:21:24] <SWPadnos> for building into your own panel:
http://www.newegg.com/Product/Product.aspx?Item=N82E16824217064
[21:22:22] <geo01005> any ideas for Nema 4 or 12 rated screens?
[21:22:32] <SWPadnos> $$$$$$$$$
[21:22:42] <Jymmm> armandaleg.com
[21:22:53] <SWPadnos> bollocks.com
[21:23:15] <Jymmm> you-left-nut.com
[21:23:52] <SWPadnos> gauchebollocks.com
[21:24:26] <Jymmm> awwww the kybd looks cute
[21:24:43] <Jymmm> http://www.newegg.com/Product/ShowImage.aspx?CurImage=83-220-008-06.jpg&Image=83-220-008-18.jpg%2c83-220-008-03.jpg%2c83-220-008-06.jpg%2c83-220-008-05.jpg%2c83-220-008-04.jpg%2c83-220-008-07.jpg%2c83-220-008-08.jpg%2c83-220-008-09.jpg%2c83-220-008-10.jpg%2c83-220-008-11.jpg%2c83-220-008-12.jpg%2c83-220-008-13.jpg%2c83-220-008-14.jpg%2c83-220-008-15.jpg%2c83-220-008-16.jpg%2c83-220-008-17.jpg&S7ImageFlag=0&WaterMark=1&Item=N82E16883220008&Depa=0&Description=
[21:24:52] <Jymmm> JEEBUS!!!! that's one url
[21:25:37] <geo01005> too bad a mesa won't fit in that thing :)
[21:25:59] <Jymmm> add your industrial case and stuff em both in it
[21:26:24] <SWPadnos> too bad there's probably no PCI clot, even once you remove the case
[21:26:31] <SWPadnos> or a slot
[21:27:46] <SWPadnos> Goslowjimbo,
http://www.hismonitors.com/
[21:27:49] <SWPadnos> err
[21:27:59] <SWPadnos> geo01005,
http://www.hismonitors.com/
[21:29:05] <geo01005> ahh, those are nice :)
[21:29:26] <SWPadnos> the 17" NEMA 12/4 one is probably about right, $835
[21:29:54] <SWPadnos> huh, only $10 more for stainless and the 4X rating too
[21:31:26] <geo01005> That what I was looking for.
[21:31:42] <SWPadnos> huh. no DVI. that's a bummer
[21:31:59] <geo01005> Would drivers be a problem?
[21:32:04] <SWPadnos> dunno
[21:33:14] <geo01005> http://www.hismonitors.com/touchscreen_drivers.htm
[21:33:55] <SWPadnos> it's pretty likely that it will just work, but I'd email first
[21:34:08] <SWPadnos> and ask why the digital monitors have no digital video input :)
[21:34:35] <SWPadnos> the 19" does
[21:35:02] <geo01005> and why the 12" is more expensive than the 15"
[21:35:08] <SWPadnos> heh
[21:35:26] <SWPadnos> less popular, and more or less only useful for fixnig old broken things
[21:39:26] <archivist> I think my controller is one from here but the website is hard work
http://ppc.mte.com.tw/
[21:40:20] <archivist> an ODYSSE 17" with touch screen, but I cant be sure
[21:41:43] <geo01005> http://smallpc.com/prod_sd190f.php
[21:42:39] <SWPadnos> inexpensive, still no DVI
[21:42:39] <Jymmm> heh... NO DISASSEMBLY
[21:42:39] <Jymmm> The warranty does not apply to the products that
[21:42:39] <Jymmm> have been disassembled by users
[21:43:17] <geo01005> http://smallpc.com/prod_sd190e.php
[21:43:35] <geo01005> Would you think it cost that much more to water proof the darn thing?
[21:43:45] <SWPadnos> dunno
[21:43:57] <SWPadnos> the other one had no mounting features, it was open frame
[21:44:08] <SWPadnos> there you are agaon
[21:44:10] <SWPadnos> again
[21:44:32] <SWPadnos> oh, I guess it does have a bezel
[21:44:52] <geo01005> dang noisy neighbors.
[22:26:10] <Jymmm> cradek: what are you wrapping in plastic?
[22:35:57] <Goslowjimbo> jepler: thanks for your help. It works now.
[22:36:07] <Goslowjimbo> bye
[23:56:05] <KimK> KimK is now known as KimK_afk
{kind=link}
{kind=link}
{kind=link}