Back
[00:03:40] <wildrice> It appears that I am off in the woods. I updated Dapper to Hardy. That seemed to work well. But when I attempt to run the Hardy ./emc2-install.sh that I downloaded. It reads a bunch of package lists, then tells me that the pacage emc2 is not available, but there is a package that replaces it called emc2.
[00:05:13] <wildrice> Then it tells me that there is not installation candidate.
[00:21:37] <fenn> download a new emc2-install.sh
[00:21:50] <fenn> the package url is different
[00:23:08] <fenn> wildrice:
http://www.linuxcnc.org/hardy/emc2-install.sh
[00:23:53] <wildrice> That was a new one. Or did you just update it? I copied the repository names from the shell script and added them via synaptic. I can see emc2 now, and I already told synaptic to install it.
[00:24:29] <wildrice> Did I make things worse?
[00:30:52] <wildrice> It seems to have installed. dpkg -l says I have version 1:2.2.8
[00:56:14] <wildrice> 2.2.8 was installed, but would not work. It said that the realtime stuff was not installed. I went ahead and upgraded the 2.2 to 2.3. Rebooted and things appear to work now. dpkg -l now says I have version 1:2.3.0-beta2.
[03:09:24] <Guest959> hey, I am trying to setup hotkeys in axis for changing the step size in jog mode. Anyone familiar enough with axis to give me hand?
[03:12:46] <eric_unterhause1> is there anything in the wiki about that?
[03:13:39] <cradek> Guest959: the key for that is "i"
[03:13:56] <cradek> in 2.3, "i" goes to a smaller increment and "I" goes to a bigger one
[03:14:10] <cradek> in 2.2, I think "i" circulates through the increments
[03:17:18] <Guest959> is there an easy way to setup keys for anything? What i did on an older amchine was hack a keyboard and solder buttons to operate established hotkeys. Thinking of doing like that on a newer machine but cleaner and with more butttons.
[03:18:08] <cradek> do you mean you want real buttons on a control panel?
[03:18:34] <Guest959> yes. but in a really chessy manner
[03:18:48] <cradek> you don't have to make it cheesy - there is a lot of flexibility.
[03:18:59] <cradek> you should look into halui and/or hal_input
[03:19:07] <cradek> hal_input will read the buttons on a USB HID device
[03:19:25] <cradek> halui will let you use any digital I/O you have to run a virtual user interface
[03:19:45] <cradek> also, if your goal is jogging, a jog wheel is best - and well supported
[03:21:31] <Guest959> I have a jog wheel wired and it works well, but I was unable to get the jog increment to work as I wanted. Need to revisit it.
[03:22:40] <cradek> some people like using analog joysticks too. that is supported with the hal_input component.
[07:30:51] <Valen> I just have this vision of using an Xbox controller to run my mill lol
[07:31:56] <Valen> sorry that was in response to something somebody said 6 hours ago
[07:33:30] <Vq^_> Vq^_ is now known as Vq^
[07:41:03] <ren_encee> ren_encee is now known as renesis
[07:41:10] <renesis> guys
[07:41:46] <renesis> my xylotex/taig open loop stepper thing has a thing with the z at 7 ipm
[07:41:55] <renesis> itll do 180 ipm like whatever
[07:42:00] <renesis> er 18, duh
[07:42:54] <renesis> and slower and faster its ok but like 6-8 ipm it like, locks up for split sec, ever couple seconds
[07:43:35] <renesis> like at 7ipm it locks up at faster intervals than 6 or 8
[07:44:04] <renesis> okay what do i do?!
[07:44:47] <renesis> go to sleep i guess
[07:45:11] <renesis> is my z now cursed by a resonance?
[07:45:21] <renesis> do i need gecko drives
[07:45:28] <renesis> cuz that would be neat
[07:47:59] <alex_joni> renesis: sure sounds like midband resonance
[07:48:10] <alex_joni> do the motors have a shaft extending to the back?
[07:48:35] <renesis> yeah they have kobs i never use
[07:48:48] <renesis> or maybe they dont sometimes i jack them for pots
[07:49:07] <renesis> theyre d shafts
[07:49:08] <alex_joni> I think I remember reading about adding some weight on the motor (something like a dampner)
[07:49:15] <alex_joni> to help with resonance
[07:49:21] <renesis> yeah i seen that
[07:49:28] <alex_joni> or get geckos :P
[07:49:32] <renesis> like big pieces of rubber or something
[07:49:33] <alex_joni> do you have microstepping?
[07:49:37] <renesis> yeah
[07:49:47] <alex_joni> hmm.. maybe try different settings
[07:49:52] <renesis> im going to maybe try turn it off or to lower setting
[07:49:55] <renesis> its on 1/8
[07:49:58] <alex_joni> yup, that
[07:50:18] <renesis> really it doesnt seem to make a huge diff anyway
[07:50:29] <renesis> most my error is backlash
[07:50:35] <renesis> oh it makes them way quieter
[07:52:28] <renesis> http://www.geckodrive.com/product.aspx?c=3&i=14471
[07:52:31] <renesis> hmm
[07:54:17] <alex_joni> let me guess G540 ?
[07:54:29] <alex_joni> ah, 251.. part of 540 :)
[07:56:10] <alex_joni> how many axes do you have?
[07:56:17] <renesis> just 3
[07:56:25] <renesis> well, its a 4 axis controller
[07:56:39] <renesis> and i have a 4th stepper
[07:56:50] <alex_joni> then the 540 might be better :)
[07:57:05] <renesis> hmm
[08:04:49] <archivist> counter balance your Z so the stepper is less loaded, may help to get through the mid band resonance
[08:06:12] <archivist> I have mine set a lot slower to avoid problems
[08:06:43] <archivist> partly due to silly lead screw pitch
[08:06:44] <Valen> what sort of maximum travel speeds are you guys using?
[08:06:57] <Valen> what pitch you got?
[08:07:10] <archivist> 1mm pitch Z screw
[08:07:22] <Valen> ball or lead?
[08:07:27] <archivist> lead
[08:07:42] <Valen> heh was about to say that sounded perfect to me
[08:08:08] <archivist> nah step rate is too high
[08:08:10] <Valen> 1mm pitch ball screw would run nice with direct drive servo motors ;->
[08:08:48] <archivist> no such thing as 1mm pitch ball screw (never seen one anyway)
[08:09:00] <Valen> yeah i know :-<
[08:09:14] <Valen> although 20TPI is pretty close
[08:12:34] <archivist> I have more normal screws on X Y
[08:12:59] <Valen> 10TPI?
[08:13:57] <archivist> 12.7 revs an inch
[08:14:20] <Valen> sounds like its meant to be a metric measurement almost
[08:14:26] <Valen> scary ;->
[08:15:00] <archivist> got the machine set inch even though metric parts re used
[08:15:25] <Valen> i hate imperial for everything except PSI
[08:16:11] <archivist> I have swapped both ways for years, modern digital calipers make it so easy
[08:16:49] <Valen> I'm yet to see one that will tell me what 5 3/8ths is ;->
[08:23:21] <archivist> I have a really odd caliper that works in 1/4 "
[08:23:31] <archivist> up to a few feet
[08:23:59] <archivist> I must take pics one day
[08:24:04] <alex_joni> archivist: I used one once that was 5m long :)
[08:24:25] <alex_joni> you needed 2-3 people to use it
[08:24:49] <archivist> mines sliding part has holes and the beam has holes so you can set it every 1/4"
[08:27:08] <archivist> alex_joni, did you see
http://www.openstreetmap.org/ we could use it for our location map maybe
[08:27:58] <alex_joni> I saw it recently
[08:29:10] <Valen> I was pondering using some 750W 12V DC motors as my servo drives
[08:29:22] <Valen> adding encoders and the like to them
[08:29:40] <Valen> they be low voltage and all, but i can grab em for $10
[08:31:01] <archivist> some motors have unsuitable commutators for low speed positioning but at that price could be worth a try
[08:31:28] <Valen> the brushes span multiple sections on the comutators
[08:31:35] <Valen> so torque should be ok
[08:31:41] <Valen> not too lumpy
[08:32:00] <Valen> We use them as weapon motors on our robots, they come out of car radiator fans
[08:33:19] <Valen> so they are known to be fairly robust at least lol
[08:33:44] <Valen> maxon want $1200 for a 400W brushless which is the biggest they do
[08:41:01] <pjm_> good morning
[08:46:51] <alex_joni> sounds a bit small to me :)
[08:50:49] <Valen> yah, so i'm looking at mag motors now
[08:51:45] <archivist> I would like to move to ball screws and servos to get some speed
[09:03:05] <Valen> yah, i hear lots of people saying that they don't need speed when they start etc, i'm hoping to skip all the toy stuff and just start with some good gear
[09:04:00] <archivist> I cut slowly but would like rapid moves to the next cut
[09:04:52] <Valen> yeah thats what i was thinking
[09:05:04] <Valen> http://www.robotmarketplace.com/products/0M-EVCCW.html
[09:05:11] <Valen> those are the ones you can pull from cars
[09:06:07] <archivist> I note they are rated unidirectional
[09:06:32] <Valen> yeah, some of them have the brush timing advanced in one direction
[09:06:53] <Valen> IE they spin faster clockwise vs anti clockwise
[09:07:00] <archivist> may effect loop stability
[09:07:04] <Valen> http://www.robotmarketplace.com/products/MAG-S28-400.html is what the big boys use
[09:07:15] <Valen> you can re-time them its just a bit of fiddling around
[09:07:55] <Valen> magmotor rate them at 400W
[09:08:05] <Valen> you will not the 4.5HP rating there lol
[09:15:04] <micges> good morning
[10:53:37] <Optic> moooo
[11:01:16] <alex_joni> Optic: apt-get moo
[11:01:29] <Optic> yum install moo
[11:01:36] <Optic> we have a spanish programmer here
[11:01:39] <Optic> so we have a "jum repository"
[11:01:41] <Optic> it's funny
[11:25:29] <motioncontrol> good morning.I have implementated the jog pendant with encoder and fuction ok.But when i move the axis in jog pendant mode and push the botton connet at halui.jog.2.plus the axis move in jog mode.what is the pin for select the jog pendant move and normal jog move ? is possible disable the normal jog move when use the pendant ?
[15:38:12] <skunkworks> http://www.electronicsam.com/images/KandT/servostart/schem/latestcurrentlimit/right.JPG
[15:38:16] <skunkworks> http://www.electronicsam.com/images/KandT/servostart/schem/latestcurrentlimit/left.JPG
[15:39:43] <cradek> haha
[15:39:48] <cradek> that just looks silly
[15:39:54] <skunkworks> :)
[15:42:26] <archivist> when are going to see pics of the smoke :)
[15:42:51] <skunkworks> no smoke yet. barely gets warm at 17
[15:42:53] <skunkworks> amps
[15:43:14] <archivist> time to try it at 50 amps
[15:44:24] <anonimasu> * anonimasu nods
[15:45:14] <archivist> only way to test the protection circuit
[15:45:21] <skunkworks> I don't think things would hold togather at that current.
[15:45:48] <archivist> make sure camera is fired up then :)
[15:46:18] <anonimasu> take pictures
[15:50:00] <Vq^> skunkworks: i like that board :)
[16:03:27] <skunkworks> Thanks - No issues yet.
[16:06:07] <Valen> that is one phat cap
[16:07:37] <Valen> so what is it? i'm assuming some kind of PWM servo drive?
[16:07:54] <skunkworks> yes - simple current limited pwm drive
[16:08:23] <Valen> what voltage you running?
[16:08:29] <skunkworks> designed for 20khz/20a/150v. Although I have not tested it up to 150v yet. Just 20a@90v
[16:09:32] <Valen> IGBT
[16:09:38] <Valen> 's at that voltage i assume?
[16:11:50] <skunkworks> well - I am using 900v igbts but I do have some mosfets that are rated at 500v I started with. But the Rds was too high.
[16:12:10] <Valen> yah much over 100V and IGBT's seem to be the stuff
[16:12:31] <Valen> on the upside your not going to disapate any more power in your controller at 100V vs 50
[16:12:53] <skunkworks> http://www.youtube.com/watch?v=qY-FCN5ZXkg
[16:13:30] <Valen> whats the motor?
[16:15:02] <skunkworks> it is actually a converyer motor..
[16:15:10] <Valen> funky
[16:15:21] <Valen> I looking at using mag motors for our mill conversion
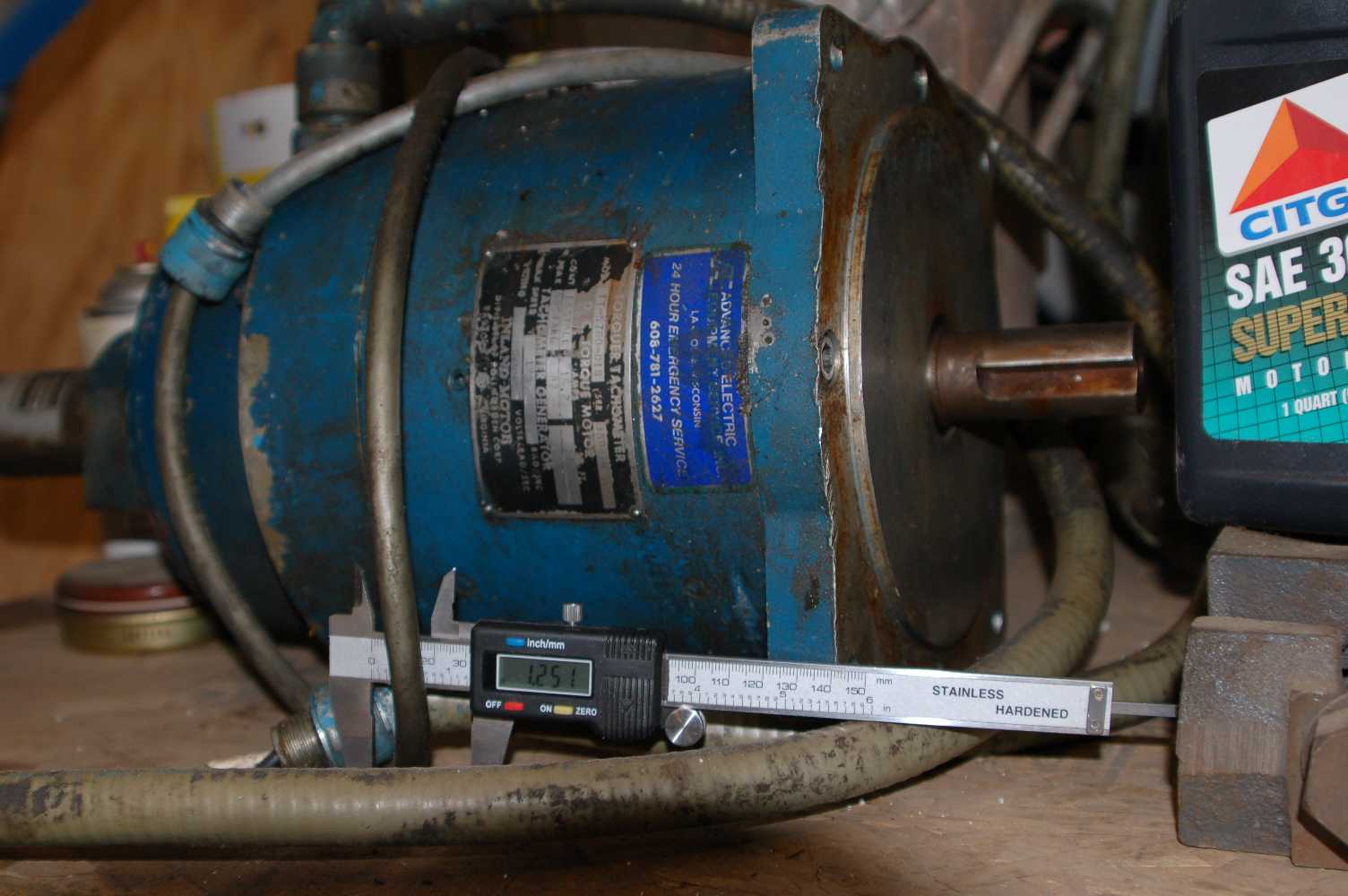
[16:15:22] <skunkworks> http://www.electronicsam.com/images/KandT/DSC_0242.JPG
[16:15:33] <skunkworks> ^ that is what I am designing it for
[16:20:09] <justa> big bulky ... bastard
[16:20:37] <Valen> yah that isnt little
[16:20:41] <Valen> what are you pushing with it?
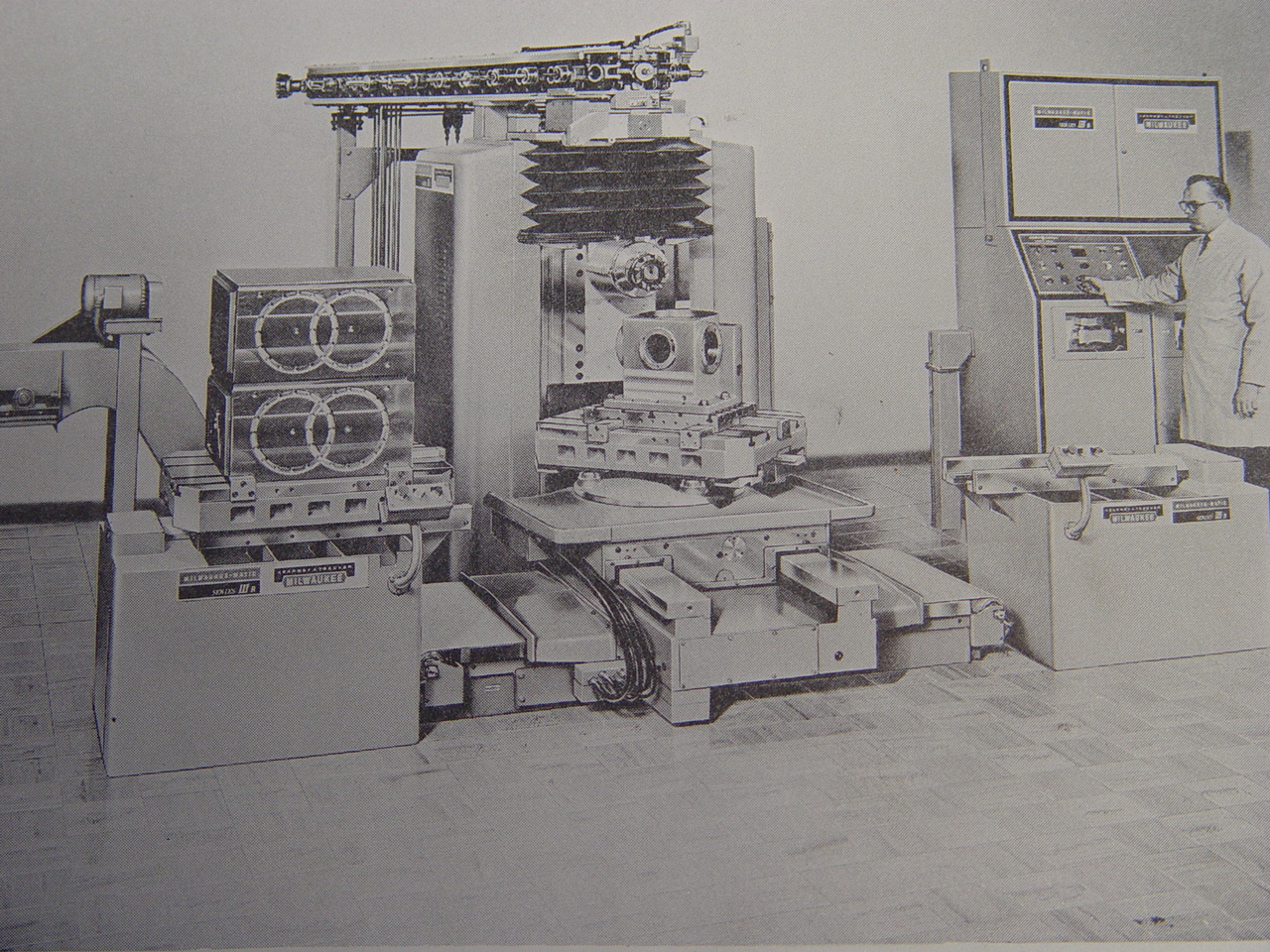
[16:25:39] <skunkworks> http://www.electronicsam.com/images/KandT/oldkandt.JPG
[16:26:02] <Valen> wtf is that thing
[16:26:19] <Valen> its like some crasy ass vertical mill or something
[16:26:24] <Valen> with built in nerd
[16:26:56] <Valen> Mk 1 CnC?
[16:27:16] <skunkworks> it is an old horizontal machining center
[16:27:25] <skunkworks> from the late 60's
[16:27:39] <skunkworks> http://www.electronicsam.com/images/KandT/DSCCurrent.JPG
[16:28:03] <fenn> general purpose nerd :)
[16:29:34] <fenn> can it actually put the pallets on the little tables on each side by itself?
[16:30:40] <skunkworks> 2 palets and 2 stations. yes - autmagically changes them. (if that is what you mean)
[16:32:34] <skunkworks> it was all hydaulic servos.
[16:32:46] <Valen> woah hardcore
[16:37:44] <Valen> well its 2:30 AM here
[16:37:47] <Valen> catchyas
[17:02:09] <rob__> hi is there a pin from halui to set feed override to 0% and 100% with single input like on the keyboard, instead of using up and down input to get there
[17:05:25] <SWPadnos> do you want to implement feedhold, or do you want the feed override to change?
[17:05:44] <SWPadnos> there are 3 ways of doing feedhold, FO is only one of them
[17:06:28] <alex_joni> adaptive-feed + mux is another way
[17:06:36] <alex_joni> feed-hold is the third one
[17:06:58] <SWPadnos> yep, that's the one I was thinking of - connect physical input to feed-hold
[17:09:40] <rob__> sorry, i see halui.feed-override.decrease and increase but like on keyboard press ` get 0 feedrate press 0 get 100% i was looking for a real work button that could do the same
[17:10:19] <rob__> then use increase decresse to bring it up and down as needed for program proveout etc
[17:10:29] <SWPadnos> feedhold and adaptive feed override are par tof the motion controller, not halui
[17:10:52] <alex_joni> archivist: is Somerset far from you?
[17:11:10] <alex_joni> rob__: motion.feed-hold
[17:11:21] <alex_joni> set it to 1, and it won't move, back to 0 and it moves again
[17:11:33] <rob__> yes
[17:11:40] <archivist> alex_joni, where in somerset 120+ miles
[17:12:39] <alex_joni> archivist: just read about Wincanton
[17:12:50] <rob__> was my next question was can i do same on max velocity u see, i can see whe i get this mill running going to take some getting use to not having that rotary feed override and rapid like on the fanucs
[17:13:18] <alex_joni> feed-override has a counts input
[17:13:26] <alex_joni> so you can use an encoder to drive it
[17:13:34] <alex_joni> (to do a rotary feed override)
[17:14:27] <alex_joni> archivist: just loved the fact that Wincanton is twinned with Ankh-Morpork
[17:15:23] <rob__> yea i saw that, i throught might be nice have 0% button, increase, decrese , 100% button nice quick reach for the 0% when needed back up to 100%
[17:17:44] <alex_joni> rob__: that's why we said that you can use the 0/100 using feed-hold
[17:17:58] <alex_joni> actually it's 0/last_value
[17:19:23] <rob__> i see what u saying thx
[17:40:01] <skunkworks> LawrenceG!
[17:40:24] <skunkworks> http://www.electronicsam.com/images/KandT/servostart/schem/latestcurrentlimit/left.JPG
[17:40:28] <skunkworks> http://www.electronicsam.com/images/KandT/servostart/schem/latestcurrentlimit/right.JPG
[17:42:49] <LawrenceG> looking...
[17:44:12] <LawrenceG> cool... I think you can control the world with that puppy
[17:44:56] <LawrenceG> I like the transistor mounting
[17:50:55] <skunkworks> it is a little hokey - you have to have holes thru the heatsink to mount the capasitor. Or you stand-off the cap a little higher to get at the screws for the igbts. But It works for me.
[18:03:28] <skunkworks> OMG - the men in black came..
http://pesn.com/2009/04/03/9501537_Mylow-threatened_told_to_stop/
[19:01:20] <motioncontrol> good morning. i want add at my configuration the jog pendant.what is the pin for select continuos jog movement at step movement(x0.1-x0.001-x0.001? ?
[19:02:13] <BJT-Work> http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?Simple_Remote_Pendant
[19:04:30] <motioncontrol> ok thenks
[19:04:35] <motioncontrol> thanks
[19:09:06] <BJT-Work> np
[19:25:55] <skunkworks> there - now I can plug a 12v computer style fan into the board.
[19:26:05] <skunkworks> Now - what else did I forget? ;)
[19:26:32] <archivist_attic> fire extinguisher
[20:27:14] <Martinp23> [Server Notice] Hi folks. A quick reminder that on April 13th, at 1400 UTC, the server you are on (kubrick) will go down for a short, about 1 hour, spell of maintenance. Please reconnect to the irc.freenode.net rotation asap to avoid the split. Thanks for using freenode!
[20:44:34] <alex_joni> skunkworks: lazzors
[20:46:02] <skunkworks> heh
[20:46:18] <skunkworks> buying the garage lumber today finally !
[21:06:18] <alex_joni> skunkworks: cool
[21:40:40] <dmess> hi all
[21:53:40] <notranc> hi one
[21:53:48] <alex_joni> good night all
[21:54:33] <notranc> Alex, the time is 14:50 not time to sleep
[22:09:48] <toastyde1th> toastyde1th is now known as toastydeath
[22:19:44] <maddash> ggggggggggggggggggggggggg
[22:20:04] <toastydeath> fffffff
[23:25:58] <|dareposte|> wow that was miserable
[23:26:06] <|dareposte|> note to self: do not buy cheap imported taps
[23:28:07] <fenn> indeed
[23:31:24] <|dareposte|> had to scrap the part, and buy a good tap too
[23:31:28] <|dareposte|> and a day delay on the job
[23:31:30] <|dareposte|> d'oh
[23:37:01] <|dareposte|> but what is sweet, is i got my kennemetal insert holder set up and working for a turning facing tool, and what a huge improvement!
[23:37:11] <|dareposte|> totally worth the $$
[23:40:53] <|dareposte|> it cuts so smoothly... wish i'd done it earlier
[23:41:32] <|dareposte|> whoever said carbide is only for huge lathes with tons of rigidity should come watch it cut
[23:47:32] <|dareposte|> maybe i should make a video
[23:47:49] <|dareposte|> * |dareposte| fetches video camera and heads to the lathe
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}