Back
[00:01:37] <eric_unterhause1> I wish my cable tv provider had competition
[00:03:21] <eric_unterhause1> eric_unterhause1 is now known as unter
[00:06:45] <tomp> re: the wrapped rotary position, is the 1st note about modulus positions? (where 360.00 = 0.000 = -720.000 etc )
[00:07:21] <unter> I just had to fix that for my brushless motor controller, not that it is emc related at all
[00:08:20] <tomp> fwiw: in other controls this is a system parameter (like emc's .ini ) , not a gcode ( infer that it is not often changed, nor needed inside programs )
[00:10:38] <unter> probably shouldn't be gcode
[00:40:01] <unter> I see the discussion about mesa devolved after I left
[00:52:08] <unter> how you get a link that represents a particular street view in google maps?
[00:52:40] <archivist> right click iirc
[00:53:56] <unter> there is a link button
[00:55:17] <unter> lots of extraneous data in the link, but it works
[00:58:58] <skunkworks> one of the reasons I think step/dir drives are evil. I am not 100% sure I have all the bugs out of it.. The last thing seems to be a snubbing diode across the input of the comparator.
[00:59:06] <skunkworks> what?
[00:59:18] <skunkworks> lets try that again
[00:59:30] <skunkworks> http://cnczone.com/forums/showpost.php?p=552799&postcount=49
[00:59:55] <skunkworks> 128 counts? that seems excesive
[01:03:08] <archivist> "Step motors don't lose a step here or there due to overload" wrong!
[01:04:51] <archivist> plus other reasons like resonance causing momentary overload
[01:07:00] <archivist> I assume he is pushing stepper over servo, to sell his drives with some "partial" truths
[01:09:24] <skunkworks> yes. He has good products but skewed ideas
[01:10:07] <archivist> mines a stepper system, but I sure know what steppers cant do
[01:13:16] <skunkworks> our big gantry is steppers. No problems.
[01:13:24] <eric_unterhausen> brushless kicks stepper all to hell
[01:13:38] <eric_unterhausen> but Marriss gave up on his brushless drive
[01:13:53] <skunkworks> did he? the stepper servo?
[01:14:00] <eric_unterhausen> no, brushless
[01:14:10] <skunkworks> ah
[01:14:25] <archivist> I wonder if a drive could abuse steppers and over drive a la brushless
[01:14:30] <eric_unterhausen> actually what he says there is ok
[01:15:04] <skunkworks> he hinted about making a servo drive in that thread. (assuming just servo like pwm+dir or +/-10v)
[01:15:09] <eric_unterhausen> up to the part about steppers being better because they have the most torque at stall
[01:17:33] <eric_unterhausen> he should have qualified "servo" with "dc servo" and I wouldn't have disagreed much
[01:18:12] <eric_unterhausen> brushless servos have rated torque at speed
[01:19:10] <eric_unterhausen> and at stall
[01:19:19] <JymmmEMC> SWPadnos: AT&T screwed up my order and the fiber installed was rescheduled for tomorrow. Becasue of their fubar I got a HUGE credit for the first month.
[01:20:28] <eric_unterhausen> you're lucky they didn't send out the bully boys to make you happy about that
[01:20:55] <JymmmEMC> eric_unterhausen: Nah, I have the # for AT&T Executive Offices
[01:21:31] <JymmmEMC> and I called it Wednesday too.
[01:22:38] <skunkworks> eric_unterhausen: did you see this?
http://www.youtube.com/watch?v=qY-FCN5ZXkg&feature=channel_page
[01:23:21] <eric_unterhausen> I saw it the other day, very impressive
[01:23:42] <eric_unterhausen> is that with pluto?
[01:24:39] <eric_unterhausen> please tell me a cnc instructor understands the Pythagorean theorem?
http://cnczone.com/forums/showthread.php?t=71687
[01:25:04] <skunkworks> yes - but using it as a function generator.. and using an encoder as a pwm duty cycle knob. :)
[01:25:26] <eric_unterhausen> that's cool
[01:26:14] <skunkworks> the circuit for sure needs a schottky doide across the input to the comparator for snubbing -v
[01:30:28] <tomp> skunkworks: the video is great. take care of your wrists ;) try the rurg series ultra fast diodes
[01:32:57] <eric_unterhausen> step direction is not actually evil. If you have following error based on encoder feedback, it's really a robust design
[01:33:48] <eric_unterhausen> if it weren't for step/dir, mach3 would be a big safety hazard
[01:33:54] <skunkworks> heh
[01:50:01] <maddash> today, I was badly beaten
[01:51:36] <maddash> i wrote my own assembly code (for MIPS32), and then I wrote the same code in clear-cut (read: no fancy tricks) C, and then compiled with -0s.
[01:51:57] <maddash> the code involved doing some processing on a line of 320 pixels
[01:52:16] <maddash> suffice it to say that GCC -Os thoroughly kicked my ass.
[01:52:34] <maddash> by several hundred instruction cycles
[01:52:52] <archivist> hehe
[01:53:15] <archivist> but now you wont let it happen again
[01:56:42] <maddash> nope. which is why I'm committing harakiri. for great honor.
[01:57:22] <eric_unterhausen> I hate captchas where you can't tell what the letters are upper or lower case
[01:58:25] <archivist> I hate the need for them as well
[01:59:55] <maddash> O/o,s/S,C/c,K/k,P/p,V/v,X/x
[02:00:03] <maddash> wtf where'd my optimizations go?
[02:01:43] <maddash> fucking hell, I mixed the two up
[02:01:58] <maddash> *I* kicked gcc's butt by 257 cycles
[02:02:08] <maddash> stupid scope
[02:02:15] <eric_unterhausen> they are just trying to make you feel good
[02:05:12] <maddash> * maddash goes back to being the brooding assembly coder
[02:05:31] <maddash> fucking gcc, don't reorder my assembly code
[02:06:40] <archivist> hehe masm "helps" too
[02:10:30] <maddash> that's not to say that gcc doesn't have its advantages
[02:10:56] <maddash> the most obvious being that it's waaaaay easier to code in C
[02:11:37] <maddash> hm, g/f says, 'pleeease, can we talk? I miss you? pleeeeeeaaaase?'
[02:11:50] <maddash> haha, hell no
[02:12:01] <archivist> hehe
[02:13:05] <eric_unterhausen> that's crazy talk
[02:13:30] <maddash> then let's talk crazy
[02:13:42] <eric_unterhausen> on her part I mean
[02:15:36] <JymmmEMC> maddash: Careful there, could lead to an acute case of lackanooky if you don't periodically throw her a bone (no pun intended).
[02:16:21] <maddash> oh haha
[02:18:03] <maddash> dict lackanooky^H^H^H^H^H^H^H^H^H^H^H^H^H^H^H
[02:18:03] <JymmmEMC> maddash: Just setup some "together time" with you and her, maybe a dinner, small present, and you should build up at least 6 months credit with her =)
[02:18:35] <JymmmEMC> If less than 6 months, kick the bitch to the curb!
[02:18:39] <JymmmEMC> =)
[02:19:36] <maddash> crap, yet ANOTHER voicemail: "Why won't you pick up? I miss you. Pleease, can we talk? I want to see you tomorrow, please?"
[02:19:48] <maddash> quiet bitch, I'm coding.
[02:31:01] <maddash> sweeet
[02:31:14] <maddash> my bot now sees 320x240 @ 30fps
[02:31:51] <maddash> now if only i could get the security buzzer working
[07:09:02] <KimK_> KimK_ is now known as KimK
[10:08:50] <motioncontrol> good morning.is possible compile the emc2 for linux debian ppc processor?
[17:16:06] <motioncontrol> good evening.i have one question for add the 4° axis at mesa m5i20 is possible?
[17:17:11] <SWPadnos> yes, the 5i20 can run up to 12 servos, depending on the firmware you choose (using hostmot2)
[17:19:22] <motioncontrol> ok thanks.when i load in hal file loadrt hostmost2 and line after select the firmware load , i important specificatio in parameter /SVST8_4.BIt num_encoder 3 or 4?
[17:21:02] <motioncontrol> excuse my english.in parameter num_encoder i select 4 (for 4 axis) , and 3 (for 3 axis)?
[17:21:45] <motioncontrol> example:loadrt hm2_pci config="firmware=hm2/5i20/SVST8_4.BIT num_encoders=4 num_pwmgens=4 num_stepgens=1"
[17:21:57] <SWPadnos> that parameter says nothing about axes, it says how many encoder inputs you want to enable (or stepgens or PWM generators)
[17:22:28] <SWPadnos> you may need num_pwmgens to be 5 if you have 4 axes, if you want to drive the spindle speed with PWM
[17:23:36] <motioncontrol> ok . for my configuratio 3 axis analog and spindle analog the line is :loadrt hm2_pci config="firmware=hm2/5i20/SVST8_4.BIT num_encoders=4 num_pwmgens=4 num_stepgens=1" is ok?
[17:24:56] <SWPadnos> unless you have a stepper somewhere, num_stepgens can be 0 (though there was a bug that needed it to be 1), and you don't need the extra encoder input unless you have a spindle encoder
[17:24:59] <SWPadnos> or a jog wheel
[17:27:23] <motioncontrol> no i don't the stepper i want rwalization one configuratio on my 5i20 card for : 3 analog axis , one alamlog spindle and 1 jog wheel. the line is:loadrt hm2_pci config="firmware=hm2/5i20/SVST8_4.BIT num_encoders=3 num_pwmgens=3 num_stepgens=0"
[17:28:35] <SWPadnos> loadrt hm2_pci config="firmware=hm2/5i20/SVST8_4.BIT num_encoders=4 num_pwmgens=4 num_stepgens=0"
[17:28:36] <motioncontrol> no i don't the stepper i want rwalization one configuratio on my 5i20 card for : 3 analog axis , one alamlog spindle and 1 jog wheel. the line is:loadrt hm2_pci config="firmware=hm2/5i20/SVST8_4.BIT num_encoders=4 num_pwmgens=4 num_stepgens=0"
[17:28:41] <SWPadnos> right :)
[17:28:47] <motioncontrol> ok excuse for my error
[17:28:51] <SWPadnos> no problem
[17:29:58] <motioncontrol> ok for connect i connectio 3 axis encoder on my mi20 board , 1 splindle encoder on the m5i20 board and the jog wheel connection ?
[17:31:19] <SWPadnos> jog wheel goes to the fourth encoder input
[17:32:15] <JymmmEMC> Or a USB joystick! =)
[17:32:27] <SWPadnos> icky poo
[17:32:49] <motioncontrol> i don't understand. i have 4 encoder: 3 for axis and 1 for splindle.the jog wheel is possible connect the paralel port?
[17:33:03] <JymmmEMC> SWPadnos: Yeah right, you better check your junk drawer buddy! I got a receipt with your name on it!
[17:33:15] <SWPadnos> oh, I didn't know you had a spindle encoder also
[17:33:22] <SWPadnos> you need num_encoders=5 then
[17:33:50] <SWPadnos> and you need to connect the jog wheel to the second connector
[17:34:55] <JymmmEMC> ...and the 6 axis joystick to the USB port! =)
[17:35:17] <JymmmEMC> SWPadnos: (was it 6 or 8 axis?)
[17:35:24] <SWPadnos> jogging via USB is good, but not as precise as using an MPG connected to the realtime motion controller
[17:35:34] <SWPadnos> two sticks, plus a joypad or two
[17:35:50] <JymmmEMC> 10 axis
[17:36:06] <JymmmEMC> err 6
[17:36:08] <motioncontrol> ok if i use the SVST8_4.bit i have the firmware for 4 channel-servo unit and use only one p connector the my 5i20 card.I want use the 32 input and 8 output on the 2 p conneftot the 5i20 card.
[17:36:22] <SWPadnos> two sticks, a joypad, a 4-key diampnd pattern, and 7 other buttons
[17:36:28] <SWPadnos> diamond
[17:37:41] <SWPadnos> if you want 5 encoder inputs, then you must use some of the pins on the second connector for the fifth encoder input, that's where it connects to the FPGA
[17:39:55] <motioncontrol> if i want free the second connector, can i use the parallel port for job wheel?
[17:42:49] <SWPadnos> yes
[17:44:44] <ec1> ec1 is now known as ayji
[17:45:13] <motioncontrol> ok.you thing is possible connect 2 mi20 card in one pc for more i/0?
[17:46:10] <SWPadnos> yes, you can have up to 4 or 8 of them
[17:46:28] <ayji> hi! same problem: 1. I think emc2.deb has something more than just a compiled emc2.8.8.7 - therefore I can not use rtai.deb modules from linuxcnc.org.
[17:47:04] <SWPadnos> bbl - good luck
[17:47:26] <ayji> and, i can not afford myself to fetch 28 files aka repos to be able to update liboango1.0.0 to libpango1.20
[17:47:36] <motioncontrol> ok. the frmare load for usethe second card for all i/O pin what is ?
[17:48:20] <ayji> SWPadnos: is it right, that sim-module of real-rime EMC2 doesn't run?
[17:49:56] <ayji> ayji is now known as vent313
[17:51:29] <vent313> therefore, do i need to have some hardware assembled to my PC to run EMC2?
[17:55:42] <maddash> vent313: did you compile that rtai kernel?
[17:55:57] <vent313> no, using .deb
[17:56:13] <maddash> hah. did any of the patches i sent you work?
[17:56:39] <maddash> brb
[17:57:21] <vent313> maddash: and... can not update libpango to 1.20 to use emc2.deb... Can not update repos. Has no money, to be true. Sitting with GPRS, looking towards ADSL modem, but want to buy that bmx before.
[17:58:06] <vent313> ok, quitting for some time
[17:58:49] <vent313> brb, too
[18:18:04] <pcw> motioncontrol: We will have a analog servo interface card much like the 7I33T but with 6 axis
[18:18:06] <pcw> instead of 4. This should make 3 axis +spindle +jog and 5 axis +spindle setups easier
[18:18:07] <pcw> This daughter card (7I48) should be available towards end of February (assuming I dont
[18:18:09] <pcw> screw anything up too badly)
[18:25:43] <jmkasunich> pcw: are you going to be able to fit all that on one cable?
[18:28:51] <motioncontrol> pcw the 7i48 card exist?
[18:29:58] <pcw> Just doing it now
[18:30:00] <jmkasunich> motioncontrol: not yet
[18:30:09] <pcw> Yes one cable
[18:30:41] <jmkasunich> two pins for PWM + two for encoder, per axis = 4 pins per axis = 24 pins
[18:30:46] <jmkasunich> no index and no enable?
[18:30:59] <pcw> encoder inputs are muxed
[18:31:20] <jmkasunich> oh - so special encoder firmware module?
[18:31:22] <pcw> sames as on 7I65
[18:31:41] <jmkasunich> or special mux firmware upstream of standard encoder fw
[18:32:01] <pcw> Theres a special module but its register equivalent. only difference is maximum count rate
[18:32:09] <motioncontrol> excuse the 7i65 not possible use in emc2.2.28
[18:32:18] <jepler> motioncontrol: that's right
[18:32:19] <pcw> Not yet...
[18:32:33] <jepler> motioncontrol: we'll add support for it in some future release
[18:32:42] <motioncontrol> ok
[18:34:32] <pcw> 7I48 will be easier, it just uses a different PWM mode (up/down) and the driver needs to
[18:34:34] <pcw> recognize muxed counters, but the encoder hardware is identical as far as the driver
[18:34:35] <pcw> is concerned
[18:36:37] <motioncontrol> i by the next week the one system for retrofit the cincinnati machine.i'm thing the 2 card m5i20 , but i can wait the m5i22 and 7i65 card , because is good configuration.when time is necessity for driver 7i65 included in next version di emc?
[18:37:13] <jepler> in one week? not likely.
[18:38:14] <motioncontrol> jepler please help me for connect 2 card m5i20 , because the maschine have more i/o and i want use the seconcond card for control all i/O
[18:38:35] <jmkasunich> everything you need to know is in the manual
[18:39:42] <pcw> Both solutions (7I48 card and its minor driver tweak and 7I65 with its major driver work) are likely to take a least a month
[18:39:47] <jepler> either the new hm2_pci or the old hal_m5i20 should recognize multiple 5i20 cards in one system and number them in a consistent fashion from run to run and boot to boot.
[18:40:43] <motioncontrol> in this moment i use the old hal_m5i20 driver
[18:41:11] <jepler> it should automatically recognize multiple cards, though I haven't personally tested this
[18:41:37] <pcw> With the old firmware you will not be able to use the second card fo I/O only
[18:41:54] <pcw> (for)
[18:43:03] <motioncontrol> jepler i load the in hal file the hal_m5i20 driver and sv8_4.bit firmware for first card.For the second cart if i want use it for only i/O operation , what is the firmaware an driver load?
[18:43:37] <jmkasunich> motioncontrol: why do you keep asking jepler?
[18:43:51] <motioncontrol> excuse
[18:44:03] <jepler> motioncontrol: the old hal_m5i20 driver doesn't support I/O only operation afaik
[18:44:15] <jmkasunich> look in the firmware directory, see what files are in there
[18:44:25] <pcw> svst* is HostMot2 firmware, you need a hostmot2 hal file
[18:45:13] <jepler> in hm2_pci I'm not sure how to put 4 encoders on the first card and 0 on the second
[18:46:13] <jmkasunich> carefully read the manual and the driver man pages, if that doesn't explain and some experimention doesn't help, then ask seb (he's the hm2 driver expert)
[18:46:44] <jmkasunich> I think the whole "num_encoders=4 num_pwmgen=3" string is one element in an array
[18:46:48] <jmkasunich> you can specify more than one string
[18:47:06] <jmkasunich> but I'm not sure - if I was trying to do this, I would read the manual to be sure
[18:47:26] <pcw> I think SWP crossed that particular bridge, its probably in the IRC logs
[18:47:43] <jmkasunich> if it's not in the manual, we should fix it
[18:47:59] <jmkasunich> if is is in the manual, motioncontrol should read that instead of asking
[18:48:06] <motioncontrol> ok thanks i go at prove this configuration.the my problem is i/O this cincinnati machine have 3 axis analog 1 spindle , 1 jog wheel and 48 in and 32 out for normal operation and signal exchange for robot abb process
[18:48:23] <jmkasunich> then you need two cards
[18:48:33] <jepler> yes I think that's where we started at
[18:49:04] <jmkasunich> do you need a spindle encoder (for rigid tapping, or toolchanger spindle orient)?
[18:49:35] <jmkasunich> you need 4 pwmgen, to drive the 3 axes plus spindle
[18:49:55] <motioncontrol> the spindle is analog drives and have the encoder for tool orientation .
[18:50:05] <jmkasunich> you need either 4 or 5 encoder counters = three for axes, one for spindle and one for jogwheel
[18:50:17] <motioncontrol> jes
[18:50:39] <jmkasunich> since jogwheels don't go very fast, you could use software counting for the jogwheel, and only use 4 hardware encoder counters
[18:51:27] <jmkasunich> one 7i33 board uses one connector and gives you 4 pwm and 4 encoders
[18:51:27] <motioncontrol> the jog wheel connect on the m5i20 or on parallel port?
[18:51:36] <jmkasunich> that is up to you
[18:51:42] <jmkasunich> the parport can sample faster
[18:52:22] <motioncontrol> ok i coonnect 3 axis and 1 splindle on 1 7i33 and jog wheel on the paralle port is ok?
[18:52:49] <jmkasunich> yes
[18:53:06] <jmkasunich> that leaves two connectors free on a 5i20
[18:53:17] <jmkasunich> two 7i33 boards gives you 32 in and 16 out
[18:53:18] <motioncontrol> yes only two
[18:53:42] <motioncontrol> ok but i want 48 in and 32 out
[18:53:54] <jmkasunich> so you need two more 7i37
[18:54:01] <jmkasunich> that means you need another board
[18:54:17] <motioncontrol> ok . i use two board
[18:54:39] <motioncontrol> the second boar wich driver load?
[18:54:47] <jmkasunich> use hostmot2 for both
[18:54:59] <jmkasunich> one driver runs both boards
[18:55:15] <jmkasunich> you could (but don't have to) use the same firmware for both boards
[18:55:40] <motioncontrol> i dont't understand , you have one example for hal file load 2 board pleaseeeeeeeeee....
[18:56:06] <jmkasunich> grrrr
[18:56:24] <jmkasunich> do you UNDERSTAND anything you are doing?
[18:57:01] <jmkasunich> do you know what an "AnythingIO" card is? do you understand that there is an FPGA on it, and that the FPGA does whatever the firmware you load tells it to do?
[18:57:15] <jepler> there are too many things for us to write an example of every possible thing
[18:57:24] <jepler> that way lies madness
[18:57:49] <archivist> the machine integrator has a responsibility to learn and work out his needs
[19:00:24] <jepler> as far as I can tell, the way to configure two pci boards with hostmot2 is for your loadrt h2m_pci line to look something like this: loadrt hm2_pci config="items for first board,items for second board"
[19:00:37] <motioncontrol> i want studing the ini and hal file for two card if possible.i 'm exspert for siemens-fanuc-selca-bosch cnc, and use emc only 2 weeek.i have installed on my pc the linux debian etch , patched realtime and use the m5i20 card for 3 axis configutatio.i want use the emc for retrofit realy machine for studing .
[19:00:51] <jmkasunich> jepler: I think you need "," between the two strings
[19:01:20] <jmkasunich> motioncontrol: you are very confusing
[19:01:37] <motioncontrol> i thing are confusing
[19:01:39] <jepler> jmkasunich: yes there's a "," hiding in there
[19:01:40] <jmkasunich> you managed to do RTAI patching by yourself (very hard to do), but you can't figure out hostmot?
[19:03:49] <motioncontrol> excuse for my english , but i don't understand.in this moment i use the old 5i20 driver not hm2_pci.tomorrow i use the new driver for prove.
[19:04:21] <motioncontrol> but i have necessyty for example the ini and hal file for stuing the configuration
[19:04:52] <jepler> jmkasunich tells me that it may have to be config="items for first board","items for second board"
[19:05:00] <jepler> experimentation will let you find the right value
[19:05:12] <jmkasunich> motioncontrol: you should not start with files
[19:05:24] <jmkasunich> for a machine and config this complex, you should start simple
[19:05:35] <jmkasunich> start halcmd, manually load the driver(s)
[19:06:57] <motioncontrol> ok in next day i studing and thanks for your patience
[19:07:18] <jmkasunich2_> don't go away just yet
[19:07:31] <jmkasunich2_> jmkasunich@decatur:~/emcdev/emc2.2$ halrun -I
[19:08:37] <jmkasunich2_> I'm trying to do an example
[19:11:39] <jmkasunich2_> ok, here goes
[19:12:04] <jmkasunich2_> this is using run-in-place, since I don't have EMC actually installed on this computer
[19:12:08] <jmkasunich2_> some paths will be different
[19:12:12] <maddash> how does one go about making a transparent pcb?
[19:12:22] <jmkasunich2_> if you have it installed
[19:12:35] <archivist> maddash, on saphire
[19:12:54] <jmkasunich2_> first step: start standalone HAL
[19:13:29] <jmkasunich2_> jmkasunich@decatur:~/emcdev/emc2.2$ . scripts/emc-environment
[19:13:29] <jmkasunich2_> jmkasunich@decatur:~/emcdev/emc2.2$ halrun -I
[19:13:37] <archivist> maddash, used in microwave work
[19:13:44] <jmkasunich2_> that will give you a halcmd prompt
[19:13:52] <maddash> archivist: sapphire, as in the precious gem?
[19:14:13] <jmkasunich2_> maddash: I'm trying to do an example for an EMC user, can you hold off on the OT for a minute>
[19:14:14] <jmkasunich2_> ?
[19:14:28] <archivist> maddash, yes a related man made pure clear
[19:14:30] <jmkasunich2_> next step: load the core hostmot2 driver
[19:14:41] <jmkasunich2_> halcmd: loadrt hostmot2
[19:14:51] <maddash> jmkasunich2_: sure, sorry
[19:15:04] <jmkasunich2_> next step: load the board specific driver, with config info for that board
[19:15:41] <jmkasunich2_> first time I'm only going to load the firmware, no other config info
[19:15:47] <jmkasunich2_> (so it will use defaults for everything)
[19:15:58] <jmkasunich2_> halcmd: loadrt hm2_pci config="firmware=hm2-2.2/5i20/SVST8_4.BIT"
[19:16:34] <jmkasunich2_> the exact path to the firmware will be somewhat different if you have installed vs. run-in-place
[19:16:50] <jmkasunich2_> motioncontrol: are you still there, and do you understand what I am doing?
[19:17:53] <jmkasunich2_> or am I wasting my time?
[19:18:20] <motioncontrol> excuse one moment i read
[19:19:50] <motioncontrol> ok is i understand
[19:20:11] <jmkasunich2_> so, I loaded the firmware, but didn't specify num_encoders or anything
[19:20:17] <jmkasunich2_> so I just got the defaults
[19:20:30] <jmkasunich2_> I don't know what they defaults are, so the next step is to see what happened
[19:20:40] <jmkasunich2_> that is what the show command is for
[19:22:21] <jmkasunich2_> halcmd: show
[19:22:30] <jmkasunich2_> the output of that is very long, so I put it in pastebin
[19:22:35] <jmkasunich2_> http://www.pastebin.ca/1311033
[19:22:55] <motioncontrol> ok
[19:23:02] <jmkasunich2_> if you scroll through that you will see 8 encoders, 8 pwmgen, and 4 stepgen
[19:23:16] <jmkasunich2_> we only want 4 encoders and 4 stepgen
[19:23:42] <jmkasunich2_> so we need to unload the driver, and reload it again with config info
[19:24:19] <jmkasunich2_> halcmd: unloadrt hm2_pci
[19:24:33] <motioncontrol> ok
[19:24:34] <jmkasunich2_> if you do a "show" after that, the long list is gone
[19:24:44] <jmkasunich2_> now we need to reload the driver
[19:25:37] <motioncontrol> ok
[19:25:41] <jmkasunich2_> halcmd: loadrt hm2_pci config="firmware=hm2-2.2/5i20/SVST8_4.BIT num_encoders=4 num_pwmgen=4 num_stepgen=0"
[19:26:03] <motioncontrol> ok
[19:26:09] <jmkasunich2_> then do "show" to see what you have
[19:26:25] <jmkasunich2_> apparently I did something wrong, because my "show" doesn't show any pins
[19:26:36] <jmkasunich2_> so I look in dmesg to see error messages
[19:26:58] <jmkasunich2_> from dmesg:
[19:27:03] <jmkasunich2_> [2751647.492129] hm2/hm2_5i20.0: invalid token in config string: "num_pwmgen=4"
[19:27:03] <jmkasunich2_> [2751647.492139] hm2_5i20.0: board fails HM2 registration
[19:27:16] <jmkasunich2_> so, I read the manpage for hostmot2
[19:28:09] <jmkasunich2_> and I find that I was supposed to write numpwmgens, not numpwmgen
[19:28:26] <jmkasunich2_> so I unload the driver and try again
[19:28:44] <jmkasunich2_> halcmd has command history just like bash, so it is easy to change the command
[19:29:13] <jmkasunich2_> halcmd: unloadrt hm2_pci halcmd: loadrt hm2_pci config="firmware=hm2-2.2/5i20/SVST8_4.BIT num_encoders=4 num_pwmgens=4 num_stepgens=0"
[19:29:13] <jmkasunich2_> halcmd:
[19:29:24] <jmkasunich2_> oops, bad paste
[19:29:56] <jmkasunich2_> halcmd: unloadrt hm2_pci
[19:30:05] <jmkasunich2_> halcmd: loadrt hm2_pci config="firmware=hm2-2.2/5i20/SVST8_4.BIT num_encoders=4 num_pwmgens=4 num_stepgens=0"
[19:30:06] <jmkasunich2_> halcmd:
[19:30:28] <jmkasunich2_> then I do another show command
[19:31:25] <jmkasunich2_> http://www.pastebin.ca/1311043
[19:31:35] <jmkasunich2_> now I have four encoders and four pwmgens, no stepgens
[19:32:08] <jmkasunich2_> since I only have one 5i20 board installed in this computer, I can't show you how to do two boards
[19:32:19] <jmkasunich2_> but it will be something like this:
[19:33:26] <jmkasunich2_> loadrt hm2_pci config="firmware=<firmware for first board> num_encoders=4 num_pwmgens=4 num_stepgens=0","firmware=<firmware for second board> num_encoders=0 num_pwmgens=0 num_stepgens=0"
[19:34:46] <jmkasunich2_> you can do this kind of interactive thing with halcmd to learn how to configure the board(s)
[19:34:56] <jmkasunich2_> then just copy the commands that worked into your HAL file
[19:35:10] <jmkasunich2_> you can load and unload the driver as many times as you want untill you get it right
[19:35:13] <motioncontrol> ok more more more thanks.jmkasunich2 please you have one mail for futhure question ?
[19:35:24] <jmkasunich2_> no
[19:35:32] <jmkasunich2_> if you have future questions, email the mailing list
[19:35:39] <motioncontrol> ok
[19:35:57] <motioncontrol> more thanks for you patience
[19:36:22] <motioncontrol> i save this information
[19:38:15] <alex_joni> http://www.youtube.com/watch?v=xEVy7-d2FX0&feature=related
[19:38:55] <alex_joni> one puma-style + 2 hexapods
[19:39:40] <jmkasunich2_> that looks like a V6 engine block
[19:39:48] <jmkasunich2_> is that a really big robot, or a really small engine
[19:43:46] <jmkasunich> maddash: sorry about that
[19:45:50] <alex_joni> jmkasunich: max payload I've ever seen on a puma style robot is 2000lbs
[19:46:23] <eric_unterhausen> engine block would be far less than that
[19:46:34] <jmkasunich> I was commenting on size, not weight
[19:46:47] <alex_joni> size is no issue :)
[19:47:02] <eric_unterhausen> they get pretty big
[19:47:11] <alex_joni> but I think that's a ~50-60cm long engine block
[19:47:12] <jmkasunich> I'm expect that engine block to be at least a half-meter long, which makes the robot quite large (compared to the ones I've seen at HGR)
[19:47:13] <eric_unterhausen> look at the one people were using for rides
[19:47:24] <alex_joni> robocoaster
[19:47:43] <eric_unterhausen> the ones at hgr were probably welding robots
[19:48:03] <eric_unterhausen> very small payload
[19:48:04] <alex_joni> http://www.kuka-robotics.com/en/products/industrial_robots/heavy/kr1000/start.htm
[19:48:11] <alex_joni> 10-15kg usually for welding
[19:48:41] <eric_unterhausen> it is funny that you can't tell how big they are without an external reference
[19:49:14] <alex_joni> eric_unterhausen: 5000kg, ~10000lbs is enough reference for me, thank you
[19:50:01] <alex_joni> whee. they have STL data for all robots
[19:50:17] <eric_unterhausen> that's nice
[19:50:23] <alex_joni> that should make a vismach model quite easy
[19:50:25] <eric_unterhausen> does stl allow you to move the parts?
[19:50:51] <alex_joni> nope
[19:51:03] <alex_joni> but you can load it in an 3D CAD program, and cut to pieces
[19:51:18] <alex_joni> STEP or IGES is probably more usefull, and they provide that too
[19:51:28] <alex_joni> http://www.kuka-robotics.com/en/newsevents/downloads/cadfiles/?chn={719307F5-AD9E-4F20-9594-FDDEB9A7F2B6}
[20:59:38] <skunkworks> blew a 10 amp fuse.. drive still works. ;)
[21:02:44] <alex_joni> hmm.. how come?
[21:04:07] <skunkworks> stalling rotor - testing current limit.
[21:04:09] <skunkworks> ;)
[21:04:21] <skunkworks> it goes above 10a ;)
[21:04:26] <skunkworks> * skunkworks is giddy
[21:04:41] <eric_unterhausen> you have a 10A motor?
[21:05:31] <eric_unterhausen> I need to figure out what's going on w/ my drive, one phase isn't getting much current on half its cycle
[21:12:44] <skunkworks> I have a 6a motor that I have been abusing.
[21:13:11] <eric_unterhausen> how many volts?
[21:14:53] <JymmmEMC> 1,200,000,000VAC
[21:15:14] <JymmmEMC> The worlds first tesla powered cnc !
[21:15:29] <skunkworks> it is a 100v motor - running about 80
[21:15:40] <JymmmEMC> skunkworks: variac?
[21:15:53] <skunkworks> 220-110v transformer running off of 110
[21:16:02] <JymmmEMC> gotcha
[21:16:29] <JymmmEMC> skunkworks: just 110/220 or various combinations on the primary?
[21:16:49] <JymmmEMC> 110,120,210,220,etc
[21:17:58] <skunkworks> no
[21:18:17] <skunkworks> I can run 480/110 so about 40vdc
[21:18:30] <JymmmEMC> skunkworks: ah, cool
[21:18:32] <eric_unterhausen> I have some of those tapped transformers
[21:19:16] <alex_joni> skunkworks: shouldn't the current limit kick in before the fuse blows?
[21:19:23] <JymmmEMC> skunkworks: Whenever I come across the types of xmfr that you have, they are always low current (<= 2a) so mostly worthless.
[21:19:39] <eric_unterhausen> alex_joni: you're harshing his mellow
[21:20:01] <alex_joni> eric_unterhausen: don't get me wrong, I'm happy it still works afterwards :)
[21:20:07] <JymmmEMC> alex_joni: Geeze man, toss in logic in there <rolls eyes>
[21:20:10] <skunkworks> alex_joni: yes - if you would remember what fuse I had in..
[21:20:20] <alex_joni> I would do a shortcircuit test next ;)
[21:20:27] <JymmmEMC> skunkworks: .22LR Fuse?
[21:20:35] <eric_unterhausen> that probably isn't going to work
[21:21:23] <JymmmEMC> eric_unterhausen: What do you suggest he use? .38? 9mm? .45 ?
[21:21:46] <eric_unterhausen> have you been reading the darwin awards again? or frog hunting?
[21:22:47] <JymmmEMC> eric_unterhausen: MythBusters.
[21:23:32] <alex_joni> JymmmEMC: that was confirmed, right?
[21:23:53] <eric_unterhausen> I didn't see that one
[21:23:57] <JymmmEMC> alex_joni: That you can use it as a fuse? Or that it happened?
[21:24:05] <alex_joni> both
[21:24:12] <eric_unterhausen> darwin awards said it was confirmed
[21:24:13] <JymmmEMC> Or that a current WILL fire off the .22 round?
[21:24:21] <JymmmEMC> alex_joni: The last is confirmed
[21:24:26] <eric_unterhausen> never understood how the fuse box was pointed at the family jewels
[21:24:42] <alex_joni> eric_unterhausen: lots of ways to have the fuse box mounted
[21:24:55] <alex_joni> I've seen some cars where it's mounted in a similar fashion
[21:25:02] <JymmmEMC> alex_joni: a .22LR round will fit a fuse holder, and that the current for the headlights will fire off the round.
[21:25:16] <alex_joni> right
[21:25:36] <eric_unterhausen> I've used a penny
[21:25:41] <eric_unterhausen> on someone else's car
[21:25:50] <eric_unterhausen> they were happy to get home
[21:27:20] <skunkworks> I think this one is 500w although I am not 100% sure. Yes I am abusing it.
[21:27:27] <skunkworks> might be 1kw
[21:28:02] <eric_unterhausen> most large brushed dc motors are 130v for some reason
[21:28:37] <eric_unterhausen> I believe it has to do with scr controlled dc drives fed by 120vac
[21:31:50] <skunkworks> this is really just a general purpose dc motor'
[21:34:16] <skunkworks> I have a 5kw range transformer that will be used for the drive supply. iirc
[21:34:29] <skunkworks> that will rectify to about 150v
[21:34:46] <alex_joni> we use 565V DC lately
[21:34:52] <alex_joni> for the servo bus
[21:34:56] <JymmmEMC> 5kw... what are you driving a tonka truck?
[21:35:10] <alex_joni> JymmmEMC: seen the K&T skunkworks is retrofitting?
[21:35:15] <alex_joni> it's bigger than a truck ;)
[21:35:17] <JymmmEMC> nu uh
[21:35:45] <alex_joni> http://www.electronicsam.com/images/KandT/ maybe
[21:35:51] <eric_unterhausen> that thing is pretty awesome
[21:36:05] <eric_unterhausen> wouldn't want to have to move it though
[21:36:24] <JymmmEMC> When I say 'Tonka Truck' --->
http://cache.virtualtourist.com/627136-Cat_797_worlds_largest_truck-Edmonton.jpg
[21:37:56] <eric_unterhausen> alex_joni: I assume you are running brushless though
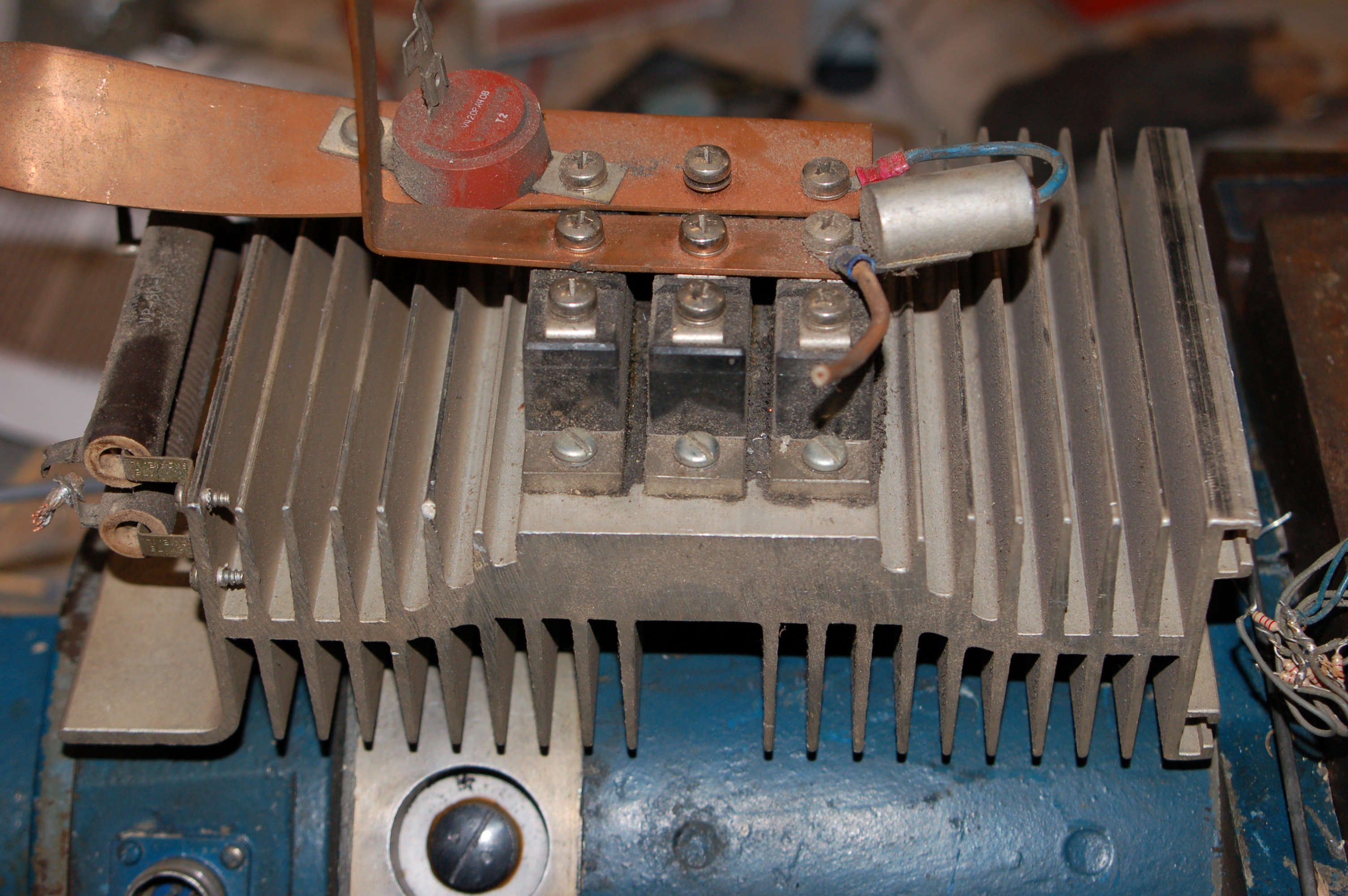
[21:38:18] <skunkworks> this is the bridge
http://www.electronicsam.com/images/KandT/conversion/diodes.JPG
[21:38:29] <alex_joni> eric_unterhausen: AC servo
[21:39:24] <eric_unterhausen> skunkworks: considered using something that drops less voltage?
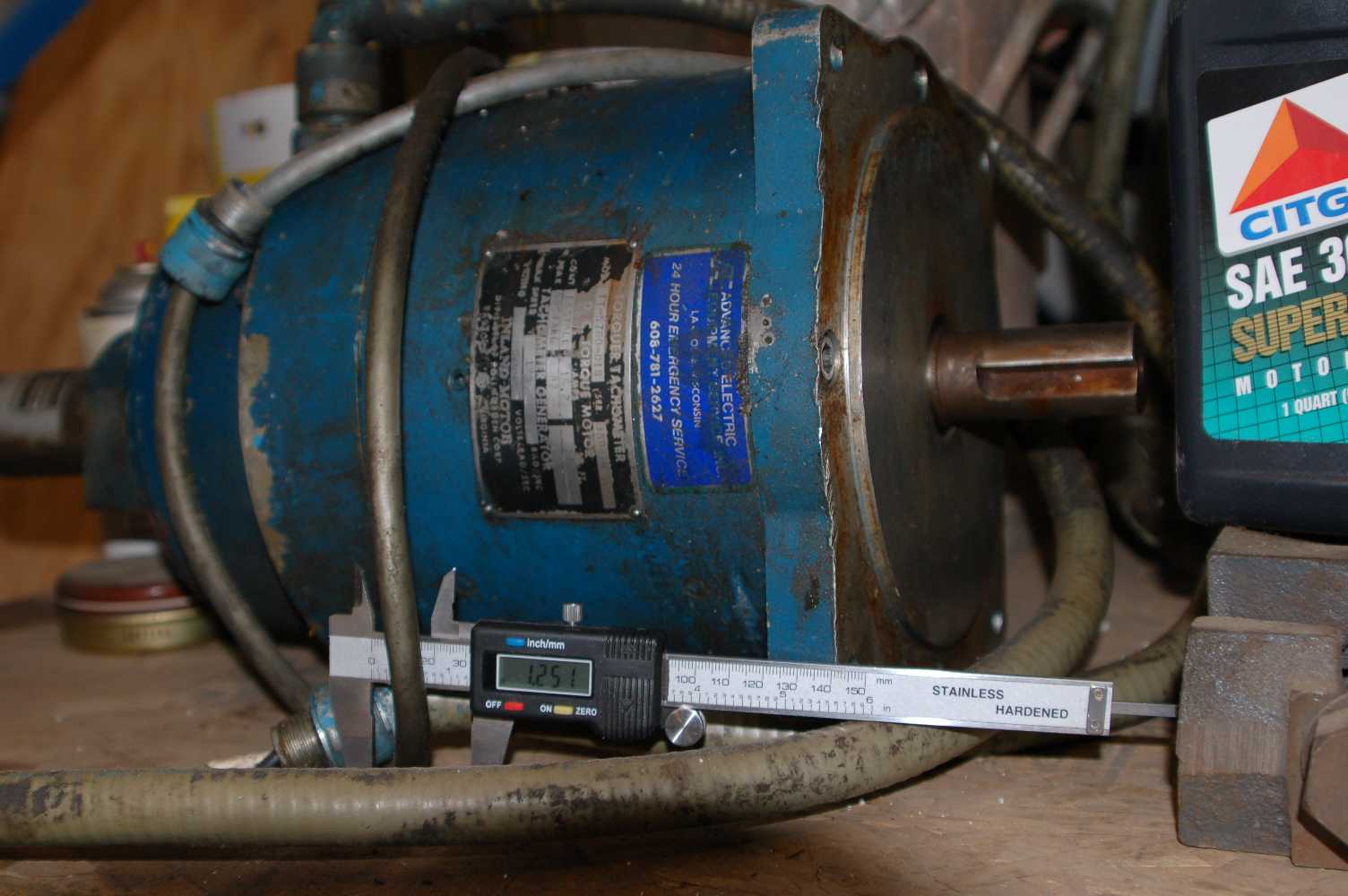
[21:39:35] <skunkworks> http://www.electronicsam.com/images/KandT/DSC_0242.JPG
[21:40:10] <eric_unterhausen> I have a batch of dc brushed motors off of robots
[21:40:27] <eric_unterhausen> they seem too big to put on a mill
[21:41:22] <skunkworks> http://www.electronicsam.com/images/KandT/servotag.JPG
[21:42:00] <eric_unterhausen> don't you love motor ratings that make no sense?
[21:43:18] <alex_joni> RAD/SEC? wtf?
[21:43:29] <eric_unterhausen> why not?
[21:44:02] <eric_unterhausen> my stepmother used to work at the plant that made that
[21:47:13] <skunkworks> it comes out to 1200rpm
[21:47:28] <skunkworks> which will give us 200ipm at 2:1 and 3tpi
[21:48:04] <skunkworks> at 150v
[21:48:38] <skunkworks> 8 brush low rpm high torque servo
[21:48:51] <alex_joni> eric_unterhausen: just seems like an odd unit ;)
[21:48:56] <skunkworks> from 1980 ;)
[21:49:04] <alex_joni> nowadays most I've seen are in rpm pr rps
[21:50:59] <skunkworks> alex_joni: how is the house coming?
[21:51:32] <alex_joni> skunkworks: on holt atm
[21:51:36] <alex_joni> too cold for any work
[21:51:38] <skunkworks> hdh
[21:51:39] <skunkworks> heh
[21:52:05] <skunkworks> heatwave here - 23degf
[21:52:08] <alex_joni> and I didn't turn up the heat there yet
[21:56:49] <eric_unterhausen> nice thing about rads is you don't have to constantly convert back and forth
[21:57:16] <eric_unterhausen> I'm really tired of pi/180
[21:59:39] <alex_joni> ha
[22:00:56] <eric_unterhausen> of course, a tach is not your friend
[22:04:03] <skunkworks> encoders are mounted
[22:04:17] <eric_unterhausen> that's good
[22:04:32] <eric_unterhausen> all the dc motors I have came with both
[22:05:13] <skunkworks> these just had tachs - I don't know what they used for position
[22:05:25] <eric_unterhausen> maybe position was somewhere else
[22:05:27] <skunkworks> this was an old 3 axis machining center that was scrapped
[22:05:44] <eric_unterhausen> possibly resolvers on the axis ballscrews
[22:05:57] <alex_joni> eric_unterhausen: I suspect resolvers are newer
[22:06:20] <eric_unterhausen> tachs were used into the '90s
[22:06:34] <skunkworks> wait - this had tachs and resolvers.. Now that I think about it.
[22:06:36] <eric_unterhausen> and resolvers were used way back
[22:06:50] <alex_joni> eric_unterhausen: you sure it's not the other way around?
[22:06:52] <VincentDeux> Hi again! What if I would try to use dapper's script for emc installation as long as i can not update libpango?
[22:07:08] <skunkworks> the tachs were integrated inside the servo - the tachs where mounted outside.
[22:07:13] <alex_joni> I'm quite positive tachs are from the 60s or earlier
[22:07:15] <eric_unterhausen> alex_joni: resolvers and motors didn't mix until they had brushless ac
[22:07:18] <alex_joni> skunkworks: not making sense
[22:07:25] <eric_unterhausen> tachs go way back too
[22:08:03] <eric_unterhausen> but glass encoders weren't very common until after you were born :)
[22:08:07] <skunkworks> heh - sorry. the taches where inside the back of the motor the resolvers where mounted externally out the back.
[22:09:01] <alex_joni> eric_unterhausen: I know that.. but the servos we use at work evolved like this:
[22:09:04] <skunkworks> you can just see the resolver out the back
http://www.electronicsam.com/images/KandT/DSC_0242.JPG
[22:09:07] <alex_joni> DC + tach, external encoder
[22:09:13] <alex_joni> AC + resolver
[22:09:22] <alex_joni> and a couple more AC+resolver generations
[22:09:47] <skunkworks> resolvers really are a neat design. they can run full of oil.
[22:10:20] <eric_unterhausen> '90s were a big switching point in industry
[22:10:46] <eric_unterhausen> I think AMC is still making amps that will work with a tach
[22:10:55] <alex_joni> eric_unterhausen: right, mostly before the 90s we had DC+enc
[22:11:03] <alex_joni> oh, and I forgot about abs-encoders ;)
[22:11:12] <alex_joni> they were also used at one point
[22:14:20] <VincentDeux> alex_joni: so can i use dapper's script to install emc2 in hardy?
[22:14:31] <alex_joni> VincentDeux: no, use the hardy script
[22:15:56] <VincentDeux> alex_joni: is there any way to find libpango1.20.deb ? I can not update & fetch repos, it takes 10 mb in my fresh installation
[22:16:25] <alex_joni> download libpango1.20.deb then
[22:17:14] <VincentDeux> alex_joni: from where? well, if only to google it... Packets' search brings no results up
[22:18:00] <alex_joni> VincentDeux: first get the exact name
[22:18:07] <alex_joni> then search at
http://packages.ubuntu.com/
[22:18:28] <VincentDeux> well, libpango-1.20.0, but all i see in the internet is the one 1.18.3
[22:18:51] <VincentDeux> alex_joni: ok, i try
[22:19:41] <VincentDeux> i haven't run scripts/emc-environment yet
[22:19:41] <alex_joni> http://archive.ubuntu.cz/ubuntu/pool/main/p/pango1.0/libpango1.0-0_1.20.1-1_i386.deb
[22:20:26] <VincentDeux> thanks, but i fear its dependencies ;)
[22:20:44] <alex_joni> VincentDeux: I think jepler pointed out that you can force the emc2 package to install
[22:20:50] <pcw> Resolvers as feedback date from WWII
[22:21:08] <alex_joni> pcw: guess only used as analog feedback back then ?
[22:21:20] <alex_joni> hi btw ;)
[22:21:23] <eric_unterhausen> analog position feedback
[22:21:30] <alex_joni> eric_unterhausen: right..
[22:21:39] <VincentDeux> alex_joni: it needs an update & re-fetching all-the-repos
[22:21:42] <pcw> Radar antena angle
[22:21:55] <alex_joni> the ones I've seen today go into digital servos, which use them both for positioning and for the rotor position
[22:22:00] <skunkworks> this was on our machine designed in the 60's
http://www.electronicsam.com/images/KandT/conversion/accupins.JPG
[22:22:14] <alex_joni> for position they get converted to inc/quadrature
[22:22:15] <skunkworks> sort of a linear resolver ;)
[22:22:24] <eric_unterhausen> somebody still sells those
[22:22:34] <VincentDeux> last time i wanted to sleep too much and hadn't found it. Now I'm about to install it
[22:22:36] <eric_unterhausen> and sony has very similar
[22:23:06] <pcw> They are neat because of ruggedness and the fact that they are absolute
[22:23:08] <pcw> so no halls needs
[22:23:41] <VincentDeux> my god, it's already installed, so that hardy's scrypts asks for a big kickass!
[22:23:56] <pcw> Hi Alex
[22:27:08] <VincentDeux> oh, it seems ok. and i already have that python-numarray on the cd
[22:27:44] <alex_joni> * alex_joni is off to bed
[22:27:47] <alex_joni> good night all
[22:27:54] <skunkworks> night alex
[22:31:14] <VincentDeux> alex_joni: ok, but i think you're somewhere at the Eastern Europe
[22:36:09] <skunkworks> wow - I think I am liking convection ovens
[22:40:00] <VincentDeux> no, it depends on libcairo, that -dev one & Co.
[22:41:28] <eric_unterhausen> skunkworks: my mother has an obsession with convection ovens. She bought an extra because they weren't easily available for about a decade
[22:42:14] <skunkworks> we are doing a small turkey.. Holy crap it smells good and is browning awesome.
[22:42:37] <eric_unterhausen> my boss' kids just about totalled their house using the microwave
[22:42:48] <eric_unterhausen> they are apartment shopping now
[22:45:45] <skunkworks> yikes
[22:46:42] <eric_unterhausen> huge house too. He says the insurance company is going to take a year to fix it up, they have 2 years
[22:48:02] <eric_unterhausen> word to the wise: kids tried the fire extinguisher, it didn't work
[22:50:18] <VincentDeux> eric_unterhausen: remember, that those microwaves ones actually remove vitamins from the food
[22:50:21] <Martinp23> [Global Notice] Hi all! Just a quick note to say that in about 10 minutes, one of our client servers will go down for some maintenance. The downtime window is one hour. About 700 users will split - if you've had no prior messages about this, you're not on the server which is affected. Sorry for the disruption and thanks for using freenode!
[22:50:41] <eric_unterhausen> any cooking does
[23:00:21] <VincentDeux> well, microwaves a cruel. It can blow up the sandwich
[23:41:04] <Guest519> Guest519 is now known as skunkworks
[23:46:24] <skunkworks> wow - we just found that convection roasting is awesome. crispy skin - moist turkey.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}