Back
[00:00:00] <jepler> terr: I've always assumed that it was something other than my DSL modem that causes problems when it rains (poorly buried line or something)
[00:00:42] <terr> those will not give higher step rates. They will give smoother motion control because they are interpolating. I cannot understand how they get more poles and how they can hold a motor between poles
[00:01:06] <terr> H2O absorbs em waves
[00:02:07] <jepler> The goal is to keep the motor at its nominal power rating all the time---that gives the highest torque possible at a given speed.
[00:02:27] <jepler> you can't change the power instantaneously, because the motors are inductors
[00:03:05] <jepler> but you can achieve a sine profile, which gives full power at all angles, when you do microstepping
[00:03:24] <jepler> half-step torque compensation gives a more sine-like profile as well
[00:05:54] <terr> jepler: sure you can - but you have the physics of two poles and a magnet between em. You can charge the poles any way you want. In the end you can have infinit attraction or resistance at the poles and you never get more than a wet noodle in the middle
[00:06:31] <terr> jepler: I am thinking when the motor is stationary - holding a position
[00:06:38] <jepler> when I said "angle" above I didn't so much mean the shaft angle as the theta of sin(theta)^2 + cos(theta)^2 = 1
[00:07:06] <jepler> where sin(theta) and cos(theta) are the current in the respective windings
[00:07:13] <terr> I meant shaft angle
[00:07:34] <terr> jepler: I have to look at the geometry of the windings
[00:08:18] <terr> jepler: you can accelerate and decelerate linearly with microstepping - but you cannot hold a motor at other than its poles
[00:09:09] <terr> jepler: there is just no way on earth you can do that!
[00:09:55] <jepler> terr: Once you have a stepper motor, perform an experiment. First, put I(rated) through one coil. Measure the torque (holding torque). Then, put I(rated)/sqrt(2) through both coils and measure the torque again.
[00:10:09] <terr> and there is no reason to subdivide the stepping rate by the microstepping rate because your motor cannot do this anyways unless you are assured you are dealing with accelerations
[00:10:18] <jepler> you will measure a very similar holding torque in both instances
[00:10:32] <jepler> the second is the "half-step" position
[00:10:32] <terr> jepler: haha - good point.
[00:10:52] <terr> stop talking thru me hat and get a motor.
[00:11:04] <jepler> they have similar torque because they are the same power
[00:11:34] <jepler> all my motors are cheap crap
[00:11:56] <terr> jepler: do you think the ones I posted are good?
[00:12:37] <jepler> I can tell you where to get a good deal on the least powerful servo motors you'll ever see.
[00:12:37] <jepler> http://emergent.unpythonic.net/projects/01142347802
[00:13:14] <terr> jepler: I want most powerful
[00:13:28] <jepler> terr: yeah, based on the specs they seem to be good motors at a good price.
[00:13:46] <jepler> terr: "The best is the enemy of the good"
[00:13:50] <terr> jepler: based on specs. Whare do you live?
[00:13:57] <jepler> terr: Lincoln, Nebraska, USA
[00:14:06] <jepler> you?
[00:14:10] <terr> Calgary
[00:14:44] <terr> I can ship you a motor - THat is worth it for me!
[00:14:52] <jepler> you want to ship me a motor?
[00:15:02] <terr> I don't know how to test them
[00:15:40] <jepler> You seem to think I'm a professional
[00:16:04] <terr> jepler: no - but a keen hobbiest or a keen student
[00:16:14] <jepler> hobbyist
[00:16:25] <terr> either is better than a rank amature
[00:16:48] <jepler> did you look at that URL I gave earlier? The toy in that photo is the closest thing I have to a CNC mill.
[00:17:04] <jepler> (do you recognize what it is? I don't know whether it's something every canadian kid owned too)
[00:17:14] <terr> jepler: I think I did - that was a couple hours ago.
[00:17:38] <jepler> I mean the URL I gave just a few minutes ago:
http://emergent.unpythonic.net/projects/01142347802
[00:19:40] <terr> with the cat
[00:20:11] <jepler> this is something else
[00:21:00] <terr> I cannot read mandrin
[00:21:27] <jepler> what can't you read? All my pages are in English---I can't read mandrin either.
[00:22:32] <jepler> or do you just mean it's kinda technical?
[00:22:40] <jepler> the point is that I don't have a mill, I have a kid's toy
[00:23:30] <terr> I was looking at the asian characters
[00:24:43] <jepler> oh -- in the photo? I don't know if they have any meaning. They're just placemats.
[00:24:57] <jepler> I didn't even realize they were there
[00:25:30] <terr> how in the hell was I suppose to knwo that! I'm on the phone with my boss trying to read them
[00:26:32] <jepler> that's funny.
[00:27:12] <jepler> sorry about that
[00:35:12] <fenn> bird rabbit dog (cant make out one)
[00:38:37] <fenn> not in my dictionary either.. must be chinese
[00:39:18] <jepler> fenn: thanks .. I guess
[00:39:45] <fenn> probably "groundhog" or omething
[00:40:02] <jepler> "weasel" "hedgehog" .. it's a list of ubuntu release codenames?
[01:53:01] <dmessier> hi all... anyone want MY job...its up for grabs
[01:53:49] <cradek> aren't you the one who tried to give away his kid before?
[01:54:31] <dmessier> yup... i'll sell or give away nearly anything once im done withit
[01:54:56] <cradek> just wondered (sensed a pattern)
[01:54:58] <dmessier> reduce re-use recycly...
[01:56:03] <dmessier> facility and potential is phenomonal... the PLAN sucks
[01:58:44] <CIA-8> 03jmkasunich 07HEAD * 10infrastructure/farm-scripts/check_commit: moving farm stuff over from the old repository (it was in the unused emc-hal module)
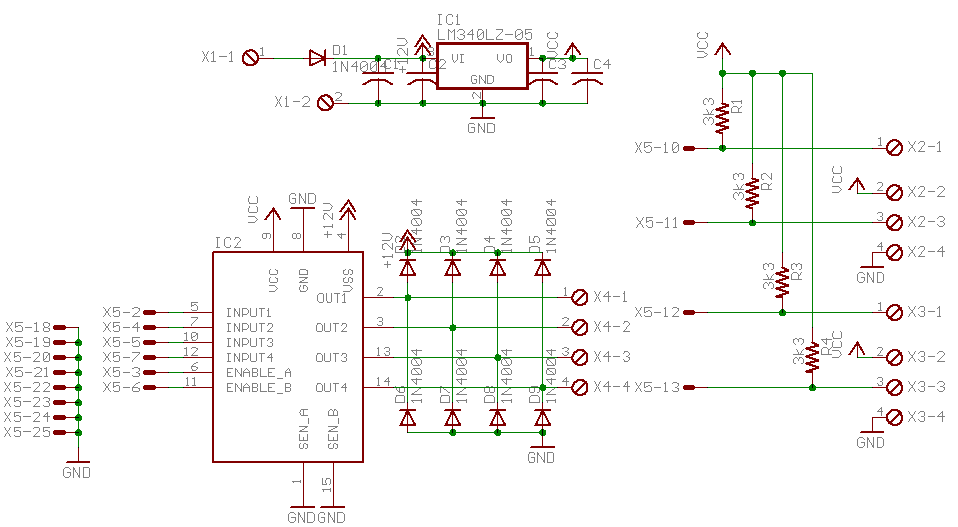
[02:05:28] <fenn> jepler what is IC2 in this sch
http://emergent.unpythonic.net/files/projects/01142347802/servo-sch.png
[02:05:51] <fenn> is that an l298?
[02:05:59] <jmkasunich> think so
[02:25:15] <jepler> fenn: yes
[02:25:23] <jepler> huh, it's not labeled
[02:33:47] <lerman_> lerman_ is now known as lerman
[03:20:48] <CIA-8> 03jmkasunich 07HEAD * 10emc2/configs/univpwm/univpwm.ini: the fourth axis in univpwm.ini was missing PWM_OUTPUT_SCALE
[03:39:18] <CIA-8> 03jmkasunich 07v2_0_branch * 10emc2/configs/univpwm/univpwm.ini: merged fourth axis ini file fix from HEAD
[03:45:29] <CIA-8> 03jmkasunich 07v2_0_branch * 10emc2/src/hal/utils/scope_files.c: merged a fix to halscope from HEAD - some ERROR messages on startup are actually unimportant warnings
[03:49:06] <CIA-8> 03jmkasunich 07HEAD * 10infrastructure/farm-scripts/ (loop_farm run_farm): last of the compile farm scripts, for now
[05:25:35] <CIA-8> 03jmkasunich 07HEAD * 10emc2/src/hal/utils/Submakefile: minor makefile change for BDI-TNG compatibility
[05:43:15] <jmkasunich> yay, BDI-TNG builds again
[05:43:42] <jmkasunich> and the new compile farm scripts work - now builds start within 5 minutes of a commit, rather than within 60 minutes
[05:43:51] <jmkasunich> bedtime
[09:57:43] <Bo-Dick> i was thrilled yesterday when i found out that half-step torque compensation could be done with only one extra and-gate and a transistor for the L297 circuit
[09:58:13] <Bo-Dick> the fact that it's not implemented in the pminmo design is then a complete mystery
[10:18:04] <Bo-Dick> holy crap, look at this link!
http://www.easgmbh.de/cnc/index-cnc.htm
[10:19:23] <Bo-Dick> 998 euro, that is around 1400 bucks! that is 4EXPENSIVE1 isn't it?
[10:20:15] <Bo-Dick> a gecko system would be way cheaper than that
[11:16:21] <anonimasu> Bo-Dick: call a company that's called sollectro and ask for prices of controls..
[11:16:30] <anonimasu> 998 euro is cheap compred to the stuff they sell..
[11:17:06] <anonimasu> ;)
[12:09:14] <alex_joni> I don't think a gecko system is cheaper than that
[12:09:20] <alex_joni> 450$ only the drives
[12:12:02] <alex_joni> 300$ motors
[12:12:21] <anonimasu> hey alex
[12:12:22] <alex_joni> then the mounting plates & slides & table way over 500$
[12:12:36] <alex_joni> hey anders ;)
[12:19:07] <anonimasu> * anonimasu yawns
[12:21:05] <jepler> Bo-Dick: Like I said yesterday, "I wouldn't blindly apply the schematic shown on page 13 of that pdf; I think that if the 'REF' input is produced by a resistive divider (say a 10k trimpot) it isn't going to work"
[12:21:53] <jepler> Bo-Dick: though if you make the more complicated board and the compensation doesn't work, you'll be able to cut a few traces and make it back into a non-compensated board, so maybe it's worth trying
[12:51:30] <lerman_> lerman_ is now known as lerman
[13:44:21] <Bo-Dick> jepler: do you mean the Vref need to come from a voltage regulator?
[13:49:08] <Bo-Dick> of course i was gonna have the torque compensation as an option in the modified board. perhaps set by a jumper or switch somehow.
[13:49:53] <Bo-Dick> but it'll be very hard for me to do some experimentation since i dont have a L297 or 298 and there is no way i can get them either.
[14:00:39] <fogl> hello, i would like to read (edit) the emc2 source, i did cvs -z5 -d:ext:<username>@cvs.linuxcnc.org:/cvs co emc2
[14:00:52] <fogl> what now...where can i find this source
[14:01:14] <cradek> did you use anon as the username?
[14:01:39] <fogl> jes
[14:01:55] <cradek> then it created an emc2 directory
[14:01:59] <cradek> the source is in it
[14:02:09] <fogl> how can i read it (what program do u use)?
[14:02:21] <cradek> you can read it with any program that views files
[14:02:46] <cradek> people use many different programs
[14:05:52] <jepler> Bo-Dick: A voltage regulator, an op-amp .. but not a resistive divider
[14:08:24] <Bo-Dick> 14of course a resistive divider can't be used. but why would an op-amp have to be used necessarily?
[14:09:39] <Bo-Dick> 14except that i can't see why the circuit wouldn't work properly
[14:12:02] <Bo-Dick> 14its pretty strange that this circuit isn't very much used in reality since it gives way more torque than non-compensated driving
[14:14:12] <fogl> i am in emc2/scr directory. If i run make clean or make command, i get an error: "command not found"
[14:16:36] <rayh> make clean
[14:16:39] <rayh> make
[14:16:47] <rayh> oops
[14:17:00] <jepler> fogl: Did you install the required packages to compile emc2? Did you run "configure" as the first step?
[14:17:02] <rayh> first ./configure --enable-run-in-place
[14:17:52] <fogl> i wollowed this installatzion:
http://timeguy.com/cradek/emc/ubuntu
[14:18:09] <jepler> fogl: That installs emc2 so you can run it
[14:18:21] <jepler> fogl: you have to install additional packages if you want to recompile it from scratch
[14:18:36] <jepler> fogl: this wiki page may help:
http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?Installing_EMC2
[14:18:49] <jepler> fogl: follow the apt-get steps in section 3.1
[14:22:15] <jepler> Bo-Dick: look at
http://emergent.unpy.net/index.cgi-files/sandbox/wontwork.png and calculate the voltage that will be measured at "Compensated Reference" when S1 is closed. When R3, R4, S1 are removed, the circuit is a resistive divider which gives 1V, which would typically set a 1A winding current if 1ohm current sense resistors are used.
[14:23:05] <jepler> Bo-Dick: don't type in grey, it's hard to read. In fact, if you do it anymore I'll simply ignore it.
[14:24:30] <Bo-Dick> jepler: sorry
[14:25:05] <Bo-Dick> jepler: tried to make the channel look a little "airy"
[14:26:17] <jepler> 9,9I just think it makes things harder to read
[14:26:53] <ValarQ> :/
[14:26:55] <Bo-Dick> *lol*
[14:27:30] <Bo-Dick> but seriously the "BGS60" looks a little tiny for that much money
[14:27:42] <Bo-Dick> you can't really say that its "cheap"
[14:32:03] <Bo-Dick> btw, who has done the pminmo construction?
[14:33:09] <jepler> just cradek afaik
[14:34:51] <Bo-Dick> cradek: have you designed the pminmo stepper driver?
[14:35:07] <jepler> someone else designed it
[14:35:21] <Bo-Dick> someone anonymous?
[14:35:30] <jepler> whoever runs the pminmo website designed it
[14:35:34] <jepler> I don't know him personally
[14:36:05] <Bo-Dick> i would be intresting to make these improvements so i can buy much cheaper motors
[14:36:32] <Bo-Dick> after all they get prolly 40% stronger in the compensated mode
[14:37:27] <Bo-Dick> i didn't get the feeling that it takes an extreme effort to make this adjustment but i might be wrong of course
[14:40:15] <Bo-Dick> the pminmo design has already been updated once before and it feels like it could be on time to make another update
[14:40:50] <Bo-Dick> i would have been happy to do it if i had the software required
[14:41:04] <jepler> you can download and use Eagle for free
[14:41:27] <jepler> http://www.cadsoft.de/freeware.htm
[14:43:26] <jepler> there seems to be a message board about the l297-8.
http://www.pminmo.com/phpBB/viewforum.php?f=8
[14:47:39] <Bo-Dick> well if the free version of eagle can do this and the files are available i'd be happy to do it myself if not someone else wants to do it
[14:49:02] <Bo-Dick> i wonder if i need to get permission from the designed of that card in order to do these modifications?
[14:49:20] <jepler> He calls them "open source" designs; I don't think you need to ask
[14:50:28] <jepler> I'm not sure he understands "open source" the same way as I do, though, because it says something about "no commercial use" at the top of the front page
[14:53:03] <bill2or3> heh
[14:57:38] <ValarQ> could be worse, it could say "not for commercial use"
[15:00:27] <Bo-Dick> i'm definitely not going to sell anything
[15:03:29] <Bo-Dick> could someone give me a tip on how to possibly find the L297 and L298 parts?
[15:05:27] <bill2or3> uhm
[15:05:29] <bill2or3> digikey?
[15:05:39] <bill2or3> let me find my usuall places-to-check list
[15:05:56] <bill2or3> hm, don't have it.
[15:06:18] <bill2or3> but check www.findchips.com, it's a good search engine for finding electronics
[15:11:34] <SkunkWorks> does mouser ship internationally
[15:11:40] <Bo-Dick> if i would've lived in the US i could just have ordered them from mouser.com for example. the fact that i'm located in sweden makes things a little more complicated
[15:14:18] <K4ts> hello
[15:21:59] <Bo-Dick> it's such a shame my dealer doesn't have the L297 and 298
[15:27:09] <bill2or3> ahh, I didn't realize you were far-away.
[15:28:55] <jepler> Bo-Dick: digikey has some international presence, including europe
[15:29:11] <jepler> http://dkc1.digikey.com/us/mkt/International.html
[15:30:06] <Bo-Dick> why isn't sweden listed?
[15:31:01] <Bo-Dick> damn
[15:32:20] <Bo-Dick> it's gonna be a serious challenge to get these parts. thats for sure :(
[15:32:30] <bill2or3> tried ebay?
[15:32:39] <cradek> be sure to get extras
[15:33:07] <bill2or3> looks like
http://stores.ebay.com/Electronic-Parts-for-Less has some
[15:35:23] <rayh> Bo-Dick, Do you know the fellow there that uses EMC to engrave fancy rollers?
[15:39:09] <Bo-Dick> rayh: uuh. "fancy rollers"?
[15:39:19] <bill2or3> like pink skates?
[15:40:02] <rayh> I believe he was cutting them for a toilet paper manufacturer.
[15:40:26] <rayh> Met him a couple times at the NAMES show.
[15:56:17] <rayh> rayh is now known as rayh-away
[15:57:39] <Jymmm> fucking suppliers.... ARGH!
[15:58:56] <Jymmm> Logistics will be the death of me yet!
[16:16:39] <SkunkWorks> what did you end up getting your girlfriend?
[16:20:27] <Jymmm> Nada. Well, we saw one nice wall mount stereo, but it was open box, so were still looking around a bit. Might have something else in mind, have to head out the door in a few minutes to check it out.
[16:20:50] <Jymmm> There are no nice clock/cd players anymore.... all crap.
[16:22:45] <Jymmm> Jymmm is now known as JymmmAFK
[16:47:45] <CIA-8> 03rayh 07HEAD * 10emc2/tcl/bin/emccalib.tcl: fixed extra whitespace in .hal references to ini variables.
[16:54:07] <CIA-8> 03rayh 07v2_0_branch * 10emc2/tcl/bin/emccalib.tcl: fixed extra whitespace in .hal references to ini variables.
[17:02:03] <CIA-8> 03rayh 07HEAD * 10emc2/tcl/bin/emccalib.tcl: Strip debug junk.
[17:03:33] <CIA-8> 03rayh 07v2_0_branch * 10emc2/tcl/bin/emccalib.tcl: Strip debug junk.
[17:24:54] <Bo-Dick> i looked inside an Epson inkjet printer and it looked like a stepper motor in there
[17:25:27] <Bo-Dick> i though steppers only could be found in old dot matrix printer
[17:27:21] <SkunkWorks> we have some old hp laserjet printers with steppers in them.
[17:27:30] <SkunkWorks> laserjet 4 or so
[17:28:30] <giacus> Bo-Dick: steppers (not new) arent expensive
[17:29:04] <giacus> I think you can buy 3 for 10$ or so ..
[17:29:04] <SkunkWorks> bo-dick: Talk to giacus about shipping issues - he is in italy
[17:29:11] <giacus> 2A 200 step/rev
[17:29:26] <giacus> Bo-Dick: check ebay
[17:30:16] <giacus> Bo-Dick: where you from ?
[17:31:31] <giacus> http://cgi.ebay.it/Stepper-motor-1-8-Motori-passo-passo-NUOVI-per-CNC_W0QQitemZ6047625385QQcategoryZ17302QQrdZ1QQcmdZViewItem
[17:32:57] <giacus> btw, I used this:
http://www.micromed.it/Elettronica/stepper.htm
[17:33:07] <giacus> M22 model
[17:33:24] <giacus> same stepper ..
[17:33:40] <giacus> if you search around youll find a lot
[17:35:13] <giacus> the good thing is stepper usually do not have mechanical wear
[17:35:21] <giacus> so.. don't worry about it
[17:36:18] <giacus> maybe just the bearing
[17:36:40] <giacus> I never had problems until now
[18:15:01] <Bo-Dick> i'm swedish
[18:15:11] <SWPadnos> bork bork bork
[18:15:26] <alex_joni> Bo-Dick: nobody's perfect
[18:15:41] <Bo-Dick> "bork"?
[18:15:56] <alex_joni> bjork
[18:16:12] <SWPadnos> It's from "the muppets"
[18:16:21] <SWPadnos> they had a character called the swedish chef
[18:16:50] <SWPadnos> he said "bork bork bork" all the time
[18:19:21] <SkunkWorks> :)
[18:19:38] <bill2or3> top quality entertainment.
[18:21:00] <SkunkWorks> I would pay twice as much for it ;)
[18:21:56] <SkunkWorks> bill2or3: how is the mill coming? any pictures yet?
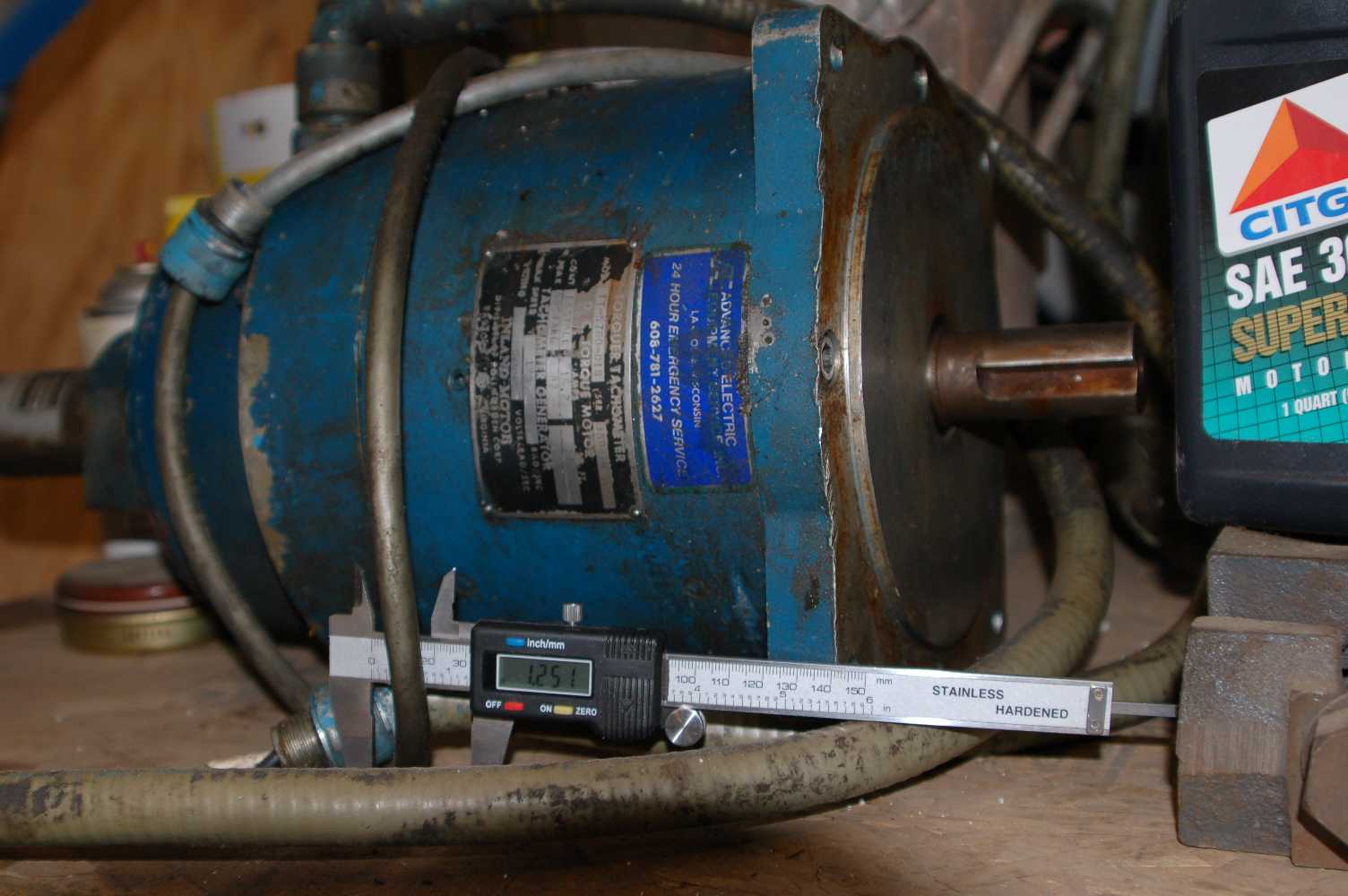
[18:23:28] <SkunkWorks> swpandnos: here is one of the servos I have been talking about
http://www.electronicsam.com/images/KandT/DSC_0242.JPG
[18:24:33] <SWPadnos> that's a fat ugly servo :)
[18:25:15] <SkunkWorks> hey - it heard you!
[18:25:33] <bill2or3> nothing really solid yet.
[18:25:41] <SWPadnos> heh
[18:25:52] <bill2or3> I've got the main frame parts cut, I'm working on making them actually the same lengths.
[18:26:10] <bill2or3> which is a lot of tedious filing and sanding.
[18:26:38] <rayh-away> rayh-away is now known as rayh
[18:39:43] <giacus> giacus is now known as giacus_afk
[19:22:25] <giacus_afk> giacus_afk is now known as giacus
[19:28:50] <SWPadnos> SWPadnos is now known as SWP_away
[19:53:44] <SWP_away> SWP_away is now known as SWPadnos
[20:51:52] <SkunkWorks> logger_aj: bookmark
[20:51:52] <SkunkWorks> See
http://solaris.cs.utt.ro/irc/irc.freenode.net:6667/emc/2006-04-07#T20-51-52
[21:24:10] <JymmmAFK> SWPadnos !
[21:24:15] <JymmmAFK> JymmmAFK is now known as Jymmm
[21:24:19] <SWPadnos> hoo-dee
[21:24:23] <anonimasu> *yawns*
[21:24:32] <Jymmm> SWPadnos hows the show?
[21:24:38] <SWPadnos> good
[21:25:23] <Jymmm> SWPadnos was that debian class any benefit?
[21:25:53] <SWPadnos> I missed out on that one
[21:26:12] <Jymmm> bummer
[21:28:10] <SWPadnos> hey - actually, I'm free for the rest of the day
[21:28:26] <SWPadnos> I'm headed down to LA later this eve
[21:28:27] <alex_joni> lucky you
[21:28:30] <SWPadnos> yeah
[21:28:31] <alex_joni> I need to sleep :(
[21:28:41] <alex_joni> wish I wouldn't do that..
[21:28:43] <SWPadnos> you're getting very sleeeeeepyyyyy
[21:28:46] <alex_joni> lol
[21:29:58] <SWPadnos> hmmm - maybe I should pop down to the hot tub
[21:31:08] <alex_joni> ok, I'm gone guys
[21:31:09] <alex_joni> night all
[21:31:45] <Jymmm> SWPadnos: I've fscked off so much this week, now playing catch up to try and see if I can get to the swap meet in the morning. Tha'ts 4am in the morning
[21:32:32] <Jymmm> SWPadnos when do you leave?
[21:32:36] <SWPadnos> argh - that sucks
[21:32:50] <SWPadnos> my LAX flight leaves at 8:30
[21:32:55] <SWPadnos> this evening
[21:33:18] <Jymmm> oh, so when do you leave SJC ?
[21:33:29] <SWPadnos> err - 8:30 this evening?
[21:33:47] <SWPadnos> actually, I need to be at SJC by 7:something
[21:33:51] <Jymmm> Ah, thought thats when it arrives in LAX
[21:33:54] <SWPadnos> nope
[21:34:22] <SWPadnos> the funny part is that I get to fly back here on Monday, then go home, via LAX
[21:34:33] <SWPadnos> ping pong ping pong
[21:34:33] <Jymmm> huh?
[21:34:49] <Jymmm> whats in LA?
[21:34:50] <SWPadnos> I had to change my return flight, because I'm shooting a commercial in LA this weekend
[21:35:06] <Jymmm> ah, ok.
[21:35:28] <SWPadnos> but the easiest way was to pay the change fee for my SJC -> home flight, and buy a new round trip SJC<->LAX
[21:35:29] <Jymmm> why do you have to fly back here?
[21:35:34] <SWPadnos> see above ;)
[21:36:04] <Jymmm> oh SJC --> ORD ?
[21:36:05] <SWPadnos> the funny part is that the routing for the new home trip is SJC->LAX->IAD->BTV (home)
[21:36:12] <SWPadnos> it was SJC->ORD
[21:36:24] <Jymmm> Yeah, then why come back here?
[21:36:30] <Jymmm> just stay in LAX
[21:36:36] <SWPadnos> because that's what my original ticket was
[21:36:50] <SWPadnos> btv<->SJC round trip, with the retuen changed to Monday
[21:37:03] <SWPadnos> it's a new ticket to get from here to LAX and back
[21:37:15] <Jymmm> eeeesh
[21:37:19] <SWPadnos> so I can't check in for the second leg of the return in LA
[21:37:23] <SWPadnos> yeah - stupid
[21:37:35] <SWPadnos> at least I get more miles though ;)
[21:37:45] <Jymmm> big deal...
[21:37:48] <SWPadnos> heh
[21:38:04] <Jymmm> you'll never get back those 6 hours of your life!
[21:38:22] <SWPadnos> well, it could be. I may end up going to Tokyo at the end of the month - it's nice to be able to use the lounges (and get upgrades) on international travell
[21:38:36] <Jymmm> fair enough =)
[21:38:39] <SWPadnos> heh
[21:38:57] <SWPadnos> I'd gladly pay 6 hours of easy waiting in trade for 12 hours of more legroom / business class
[21:39:16] <Jymmm> no doubt
[21:39:43] <SWPadnos> the hotel is even being nice about it - checkout at 6:00 PM, no extra charge
[21:39:58] <Jymmm> very cool
[21:40:13] <SWPadnos> which reminds me - maybe I should pop down to the hot tub ;)
[21:40:59] <SWPadnos> coffee and IRC or hot tub? that is te question
[21:41:34] <anonimasu> hm
[21:41:48] <SWPadnos> coffee and hot tub, maybe
[21:41:52] <anonimasu> maybe I should point bo-dick to
http://www.cnczone.com/forums/showthread.php?t=19326&page=1&pp=15
[21:42:07] <anonimasu> it's some guys from sweden building their own servos because buying servos are expensive..
[21:43:42] <Jymmm> grocery unload.... brb
[21:48:36] <bill2or3> heh.
[21:48:40] <alex_joni> anonimasu: did they blow up?
[21:49:21] <anonimasu> alex_joni: no idea..
[21:49:27] <anonimasu> they just started the thread..
[21:49:36] <anonimasu> one of thoose guys are from this town apparently..
[21:49:56] <alex_joni> oh, the northern ones
[21:49:59] <alex_joni> lol
[21:50:12] <anonimasu> but well, I have nfc.. who it is and I dont really care..
[21:50:22] <anonimasu> though it would be fun with somone who shared a interest in cnc..
[21:51:26] <anonimasu> ^_^
[22:04:42] <K4ts> night
[22:06:28] <bill2or3> nfc?
[22:07:03] <cradek> "no clue"
[22:07:24] <anonimasu> no fine clue ^_
[22:07:25] <bill2or3> ah, gotcha
[22:07:26] <anonimasu> ^
[22:07:35] <bill2or3> * bill2or3 doesnt offend that easily.
[22:07:37] <bill2or3> heh
[22:08:49] <cradek> rtfm "read the manual" stfw "search the web" stfu "shut up"
[22:08:59] <cradek> they're easy to read once you notice the pattern
[22:09:39] <anonimasu> :)
[22:13:28] <bill2or3> yes, I have a 'shut up' tee-shirt.
[23:27:53] <terr> can someone help me calculate the max tool side load given a stepper and lead screw pitch? I'm looking at a formula with looks worng
[23:29:51] <giacus> stepover ?chipload ?
[23:30:59] <giacus> I didn't understand what you're talking about
[23:32:47] <giacus> maybe, that should depend on router rpm and hp, and material to cut too
[23:32:52] <giacus> I think ..
[23:33:58] <giacus> moving mass maybe
[23:34:15] <terr> ah - I need to ask this question - this formula looks worng
[23:34:36] <giacus> where are you looking ? some url ?
[23:35:11] <terr> L=F*6.2832R/P l=load r=radius from center of lead screw to the point the torque is applied P=pitch F=force
[23:36:26] <terr> with f=12 oz-in and pitch = 20 and R=1 this works out to 12*pi*2*1/20 = 3.79
[23:36:29] <jmkasunich> that neglects friction
[23:36:50] <jmkasunich> f doesn't equal 12 oz-in
[23:36:58] <jmkasunich> it equals 12 os
[23:36:59] <jmkasunich> oz
[23:37:01] <terr> The formula looks worng because of we go from to 1 10 pitch leadscrew we ahve 1/2 the force and the formula says we have 2x the force
[23:37:05] <jmkasunich> oz-in is torque
[23:37:24] <jmkasunich> pitch is the distance traveled in one rev
[23:37:27] <terr> furthermore it doesn't matter what the diameter of the lead screw is - that is clearly irrelevant - only the picthc matters.
[23:37:34] <jmkasunich> 20 threads per inch does NOT mean 20 pitch
[23:37:40] <jmkasunich> it means 0.050 pitch
[23:38:10] <terr> I think it should be L=f*6.2832*P*R where R is the radius the torque of the motor is measured at.
[23:38:36] <jmkasunich> thats the same thing
[23:38:43] <terr> units of L = units of F which is ounces in this case
[23:38:55] <jmkasunich> right
[23:39:03] <jmkasunich> they said: r=radius from center of lead screw to the point the torque is applied
[23:39:14] <jmkasunich> you said: R is the radius the torque of the motor is measured at
[23:39:17] <jmkasunich> same thing
[23:39:23] <terr> jmkasunich: right! the term F*R is the torque
[23:39:45] <terr> jmkasunich: what is the same thing?
[23:39:55] <terr> one formula is just plain assed worng
[23:40:03] <jmkasunich> those two definitions of R are the same thing
[23:40:22] <terr> jmkasunich: but look at the formula - he's dividing by the pitch.
[23:40:33] <jmkasunich> yes, that is correct
[23:40:35] <terr> that isn't right - he has to multiply by the pitch
[23:40:48] <jmkasunich> L is the linear force, right?
[23:40:55] <jmkasunich> so a finer thread means more force
[23:40:56] <terr> that is unless he expresses pitch as 1/20th
[23:40:59] <terr> right
[23:41:01] <jmkasunich> so you divide by the pitch
[23:41:13] <jmkasunich> pitch _IS_ expressed as 1/20in
[23:41:14] <terr> how do you express pitch?
[23:41:20] <jmkasunich> tpi = threads per inch
[23:41:22] <terr> ok - then it is correct.
[23:41:25] <jmkasunich> pitch = inches per thread
[23:42:03] <terr> now he uses the term R to be the radius the torque is applied - that is worng - it is the radius the torque is measured at.
[23:42:13] <jmkasunich> semantics
[23:42:29] <jmkasunich> torque isn't applied at a radius anyway
[23:42:37] <jmkasunich> torque is force applied at a radius
[23:43:03] <jmkasunich> is this for ballscrews or acme screws?
[23:43:28] <terr> so for a 12 in-oz motor with a 20 TPI screw I get 12*6,2832*1*20 = 1507 ounces / 16 = 94 lbs
[23:43:51] <jmkasunich> seems hi to me
[23:43:52] <terr> ignoring friction - with 20 tpi its nto a ball screw
[23:44:16] <terr> well - seemed high to me too
[23:44:23] <terr> but it has to be right
[23:44:31] <jmkasunich> with acme, friction will be dominate
[23:44:35] <jmkasunich> dominant
[23:45:06] <terr> even with grease?
[23:45:14] <jmkasunich> even with grease
[23:45:25] <jmkasunich> larger diameter screw makes it worse
[23:45:47] <terr> I'm wondering why I need 140 in-oz motors on a sherline mill - there is no way I need side loads on the tool of 100 lbs
[23:45:48] <jmkasunich> (that is one calculation where screw diameter _does_ matter)
[23:46:22] <terr> yes I agree friction calcs will require knowledge of the screw details
[23:46:37] <jmkasunich> I've done those calcs before
[23:46:48] <jmkasunich> acme has a hard time getting above 15% efficiency
[23:47:01] <terr> can you tell me why I would need a 140 in-oz motor for a sherline?
[23:47:06] <jmkasunich> acme has a hard time getting above 15% efficiency
[23:47:07] <terr> ouch
[23:47:11] <terr> what about wear?
[23:47:24] <jmkasunich> plus, you have to be very conservative with steppers to avoid lost steps
[23:47:25] <terr> I can buy ball screws
[23:47:32] <terr> yes I know that.
[23:47:37] <jmkasunich> they develop rated torque only at very low speed
[23:47:48] <jmkasunich> torque drops off pretty fast as you speed up
[23:47:58] <terr> but that 90 lbs sounds like a lot - if we take 15% then its 15 LBS which is still a lot from a 12 in-oz motor
[23:48:10] <terr> unless I'm calculating it worng
[23:48:40] <jmkasunich> I think the basic calc is correct for a perfect (no friction) screw
[23:49:06] <terr> I do generally trust my ability to do grade school math
[23:49:07] <jmkasunich> but the fine pitch (which is where you get the high force from) is also the worst case for the acme efficnency
[23:49:23] <jmkasunich> terr: you must not be in the us
[23:49:24] <terr> ya - it just slides along
[23:49:29] <terr> why?
[23:49:39] <jmkasunich> most high school kids in the us can't do math to save their lives
[23:49:51] <terr> I did my degree in math
[23:49:55] <jmkasunich> lol
[23:50:00] <terr> lol
[23:50:27] <jmkasunich> lets try the calc another way, and take into account friction
[23:50:27] <terr> Its just 94 lbs seems like a lot from such a little motor
[23:50:33] <jmkasunich> see if we get a saner answer
[23:50:40] <terr> oh - just take 15% of the ans
[23:51:04] <jmkasunich> that assumes 15% acme eff - I said acme has a hard time achieving that
[23:51:14] <jmkasunich> it won't be that good with 20 tpi
[23:51:15] <terr> I tend to foget steel has a tensile strength of 80,000 lbs per in^2
[23:51:26] <terr> oh.
[23:51:27] <jmkasunich> depends on the steel
[23:51:38] <jmkasunich> I use 40,000 usually unless I know its high grade
[23:51:38] <terr> I know - that is high streangth steel
[23:51:44] <jmkasunich> ok
[23:51:54] <terr> its still a lot.
[23:52:13] <jmkasunich> instead of calcing the force from the torque, lets calc the torque needed to achieve a force
[23:52:17] <terr> I haven't got any steppers yet and I've been thinking on getting 142 in-oz guys
[23:52:23] <jmkasunich> its easier to include friction that way
[23:52:42] <terr> same formula. I don't know the coeficients tho
[23:52:52] <jmkasunich> assume you want 1 lb of force
[23:53:17] <jmkasunich> the formula you have can be re-arranged to give the torque assuming no friction
[23:53:25] <terr> http://www.camtronics-cnc.com/ <-- says he gets 16 lbs force at low speed with a 12 in-oz motor and 20 tpi
[23:53:36] <terr> 9 lbs at high speed.
[23:53:41] <terr> that is in the 15% range
[23:53:53] <jmkasunich> interesting
[23:54:07] <jmkasunich> does he say the screw diameter?
[23:54:08] <terr> his R is worng tho.
[23:54:10] <jmkasunich> bet its small
[23:54:29] <terr> screw diameter really doesn't matter much.
[23:54:37] <jmkasunich> it does for the friction part
[23:54:39] <terr> it is small - probably 1/4" screw
[23:55:11] <jmkasunich> ok, first calc frictionless: torque = load / (6.28/pitch )
[23:55:29] <jmkasunich> or torque = load / (6.28 * tpi)
[23:55:35] <terr> a ball screw assbly is 80 bux for the bearing and a 6' screw is $200 bux
[23:55:41] <jmkasunich> not cheap
[23:55:53] <terr> I figure I can make my own screws.
[23:56:47] <terr> If I use the mill and an rorary table I can calculate the travel verse the rotation and set the z to the proper cutting depth... should not be too hard
[23:57:17] <jmkasunich> with 20 tpi and a load of 1 lb = 16 oz, torque (no friction) = 16 / ( 6.28*20) = 0.00796 oz-in
[23:57:24] <jmkasunich> now calculate friction
[23:57:55] <terr> Once the thread is started over say a few inches - then I can mount the threaded part in the nut and secure it and mount the mill outboard and turn the rod by hand.
[23:58:00] <terr> should work
[23:58:01] <jmkasunich> assume a friction coefficient of 0.15 (I looked that up once, greased bronze nut on steel screw)
[23:58:28] <jmkasunich> you talking about making a ballscrew?
[23:58:32] <terr> ya
[23:58:37] <terr> shouldn't be too hard
[23:58:41] <jmkasunich> you're nuts ;-)
[23:58:46] <terr> why?
[23:59:02] <jmkasunich> 1) tolerances - good screws hold diameter to something like 0.0002
[23:59:03] <terr> Why spend $200 bux if I can make them for $10?
[23:59:16] <terr> Well - backlash is a factor.
[23:59:27] <jmkasunich> 2) hardness - good screws are hardened and ground - point contact with balls will destroy soft steel
[23:59:29] <terr> I don't know what sort of tolerances I can get
[23:59:45] <terr> can't I mill hard stuff?
[23:59:55] <jmkasunich> what kind of a mill do you have?
{kind=link}
{kind=link}
{kind=link}