Back
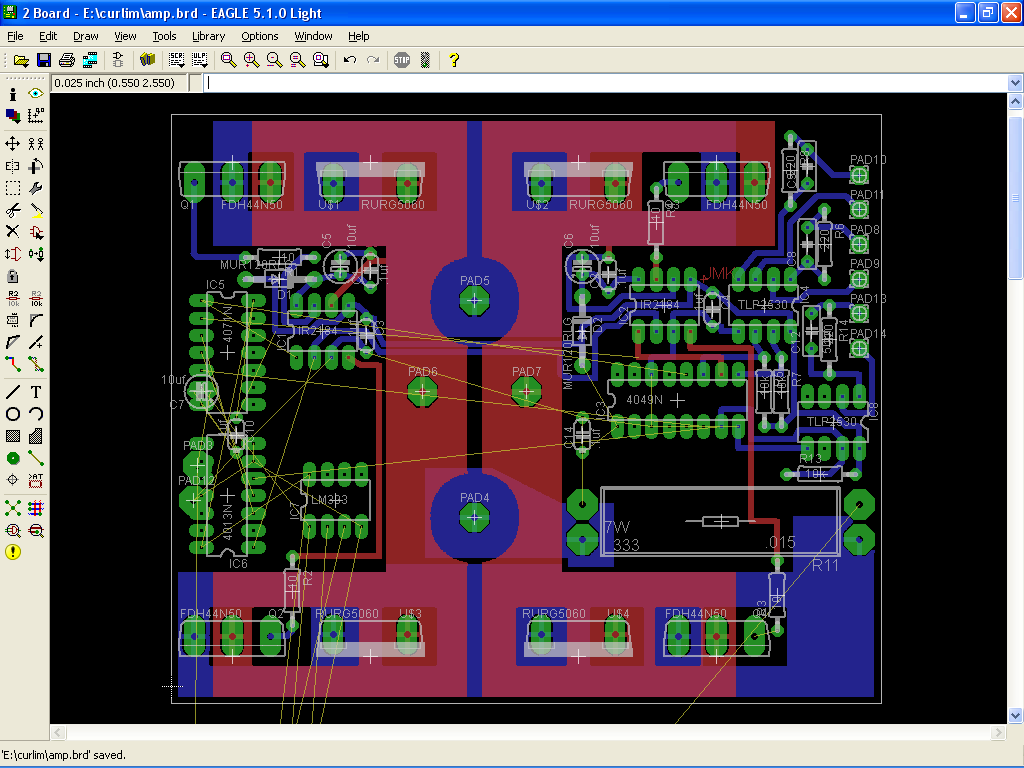
[00:05:51] <skunkworks> jmkasunich_: it is looking iffy that I can fit everyting on the board
http://www.electronicsam.com/images/KandT/servostart/uhoh.PNG
[00:06:07] <skunkworks> who need surface mount? :)
[00:15:08] <SWPadnos> you need a tiny CPLD for all the logic functions
[00:17:07] <skunkworks> heh - that is what jepler said - john (I think) said 'bah' ;)
[00:17:20] <SWPadnos> old skool ;)
[00:18:45] <SWPadnos> heh
[01:05:25] <jmkasunich_> skunkworks: getting a bit squishy
[01:27:12] <skunkworks> yes
[01:27:46] <LawrenceG> hey skunkworks
[01:28:02] <skunkworks> I was thinking - maybe 2 boards. one with the fets, gate drivers and current limit/comparator. other with logic.
[01:28:21] <skunkworks> LawrenceG: hi
[01:28:44] <jmkasunich_> skunkworks: you can't just make the board a wee bit bigger?
[01:28:52] <LawrenceG> how many more parts do you have to place?
[01:28:58] <jmkasunich_> tne interconnect between boards will be noise sensitive
[01:29:20] <LawrenceG> yea... connections a a pain
[01:29:29] <LawrenceG> are a
[01:29:54] <SWPadnos> SMT logic chips would do it
[01:29:57] <jmkasunich_> especially when you are sending things to an edge sensitive input from a board that is switching 10s of amps at 100-200 volts
[01:31:45] <CIA-35> EMC: 03jmkasunich 07TRUNK * 10emc2/lib/python/vismach.py: added an Arc primitive - can make washers, pie slices, etc
[02:14:02] <skunkworks> yeh - that is the max the free verson of eagle will do.
[02:14:27] <skunkworks> I have not given up yet.. but it will be close. a few via;s I am sure
[02:18:47] <skunkworks> jmkasunich_: what do you think of the resistor layout?
[02:24:57] <skunkworks> the far out plan would be a header style plug between the two boards.. If it comes to that.
[02:25:50] <skunkworks> also - I could graph 2 boards togather..
[02:26:14] <skunkworks> wow - did we have this discussion before? dajavu
[02:29:22] <LawrenceG> logger_dev, bookmark
[02:29:22] <LawrenceG> Just this once .. here's the log:
http://www.linuxcnc.org/irc/irc.freenode.net:6667/emcdevel/2008-08-01.txt
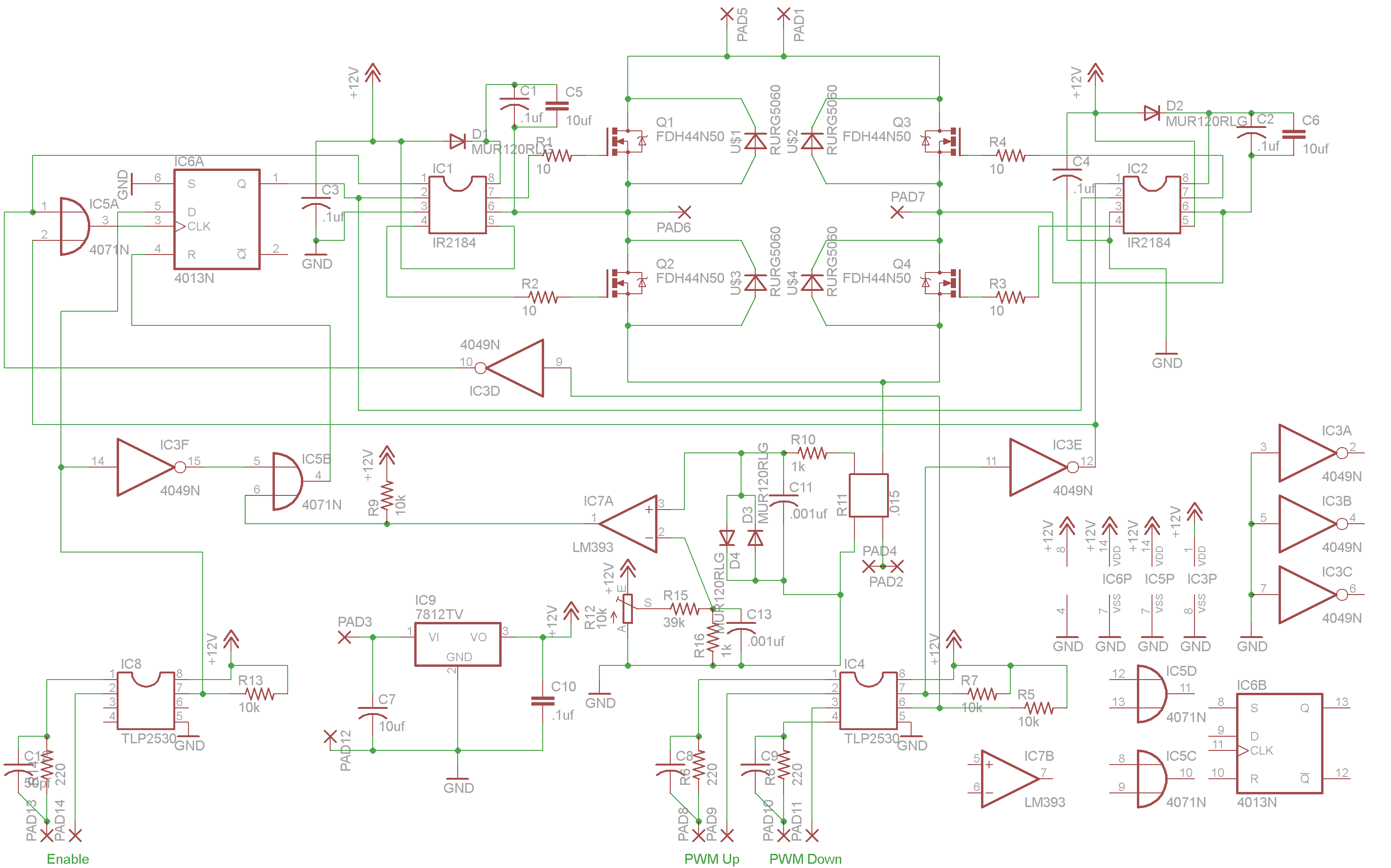
[02:31:35] <skunkworks> LawrenceG: something like this
http://www.electronicsam.com/images/KandT/servostart/newschem5.png
[02:34:34] <SWPadnos__> SWPadnos__ is now known as SWPadnos
[02:35:58] <LawrenceG> thanks... I was wondering about measuring current... the resistor gets power in/out of pwr supply... I was thinking of using a hal sensor on a motor lead
[02:36:29] <skunkworks> that would probably be better :)
[02:37:18] <LawrenceG> not sure what is best to measure.... motor current directly relates to torque, but does help prevent meltdowns on fet failures
[02:38:00] <LawrenceG> xxx... power supply current is better for protection, motor current better for torque control
[02:40:09] <LawrenceG> difference is recirculating current through diodes/fets
[02:41:29] <skunkworks> I am trying not to think about what happens when the estop gets hit durring a 200ipm shuttle and the 3kw servo dumps back
[02:42:02] <LawrenceG> quick and painful!
[02:42:58] <LawrenceG> how about a 25hp drive for an electric car next?
[02:43:18] <skunkworks> the .015 sense resistor can handle 35w for 5 seconds..
[02:45:12] <LawrenceG> i am looking for a junker vfd that I could try running on a 300vdc bus
[02:50:23] <skunkworks> that would be 50a or there abouts for 5 seconds..
[02:50:39] <LawrenceG> not sure how many 25hp vfds will run on a 240vac feed.... 460 is probably more common in that size range
[02:50:55] <skunkworks> yes..
[02:51:05] <skunkworks> we have 220 service at the shop..
[02:51:24] <LawrenceG> what is the biggest vfd you run?
[02:51:44] <skunkworks> right now - 5hp :)
[02:51:57] <skunkworks> biggest motor we ran is 25hp
[04:14:06] <CIA-35> EMC: 03cmorley 07TRUNK * 10emc2/src/hal/classicladder/ (classicladder.c socket_modbus_master.c): cleanup some messages-make more consistant
[04:16:25] <CIA-35> EMC: 03cmorley 07TRUNK * 10emc2/src/hal/classicladder/protocol_modbus_master.c: fix some errors with modbus functions 6 and 8
[05:02:01] <CIA-35> EMC: 03cmorley 07TRUNK * 10emc2/src/hal/classicladder/zEMC_README.txt: update changes
[12:18:13] <rayh> 25 hp 240v (non junker) at
http://web3.automationdirect.com/adc/Shopping/Catalog/AC_Drives/DURApulse_-_GS3_(230_-z-_460_VAC_Sensorless_Vector_Control)/DURApulse_-_GS3_Drive_Units_(230_-z-_460_VAC_SLV)/GS3-2025
[12:18:36] <rayh> Looks like you'll have to patch that together.
[12:19:15] <rayh> $1219 and shipping. Nice drives though.
[12:28:49] <skunkworks_> Neat
[12:29:46] <skunkworks_> was there any direction on how to setup a slaved axis machine? I thought there was but not seeing it on the wiki
[12:30:00] <skunkworks_> (using gantry kins)
[12:30:14] <micges> hi all
[12:30:19] <skunkworks_> Hello
[12:30:26] <micges> I have important question
[12:30:55] <micges> is there any way to make A axis linear ?
[12:31:30] <micges> I need 4 linear axes in my machine
[12:33:37] <skunkworks_> can't you just change the ini so that axis is TYPE = LINEAR
[12:33:53] <micges> I have machine that have xyz table and additional rotary axis , and I need to have preview xyz and xaz
[12:34:13] <rayh> In the old days we just typed TYPE = LINEAR in the proper place in the ini file
[12:34:54] <rayh> I'm fairly sure that that will cause some issues with the graphical display in some guis.
[12:34:58] <micges> what will that change ?
[12:35:44] <rayh> I'm not certain just how that affects the trajectory planner in recent times.
[12:37:47] <SWPadnos> ABC are explicitly angular in G-code
[12:38:27] <SWPadnos> when you use A/B/C with X/Y/Z, you get an inverse time move - they're treated as separate cartesians in the math
[12:38:34] <micges> what about uvw axes ? what are they used for
[12:38:37] <micges> ?
[12:38:40] <SWPadnos> it may end up being fine, but you should note that they're treated differently
[12:38:44] <SWPadnos> those are linear
[12:41:21] <SWPadnos> it's hard to calculate tooltip velocity (feed rate) though, when you have more than 3 axes
[12:49:13] <micges> It will be hard to do this
[12:49:18] <micges> thanks
[12:50:22] <SWPadnos> it really depends on what you want to use the additional linear axis fr
[12:50:25] <SWPadnos> for
[12:50:48] <micges> hmm
[12:51:05] <micges> originally I have table xyz
[12:52:41] <micges> and additionally to the table there is cylinder colinear with x
[12:52:56] <SWPadnos> that would be called U
[12:52:57] <micges> and when I move y to the max pos
[12:53:38] <micges> then I am above the cylinder
[12:54:03] <micges> then I want to y switch to sth to do cilinder move
[12:54:13] <SWPadnos> hmm
[12:54:14] <micges> I take some pics
[12:54:38] <SWPadnos> do you have positional control of the cylinder, or is it more of an "extend / don't extend" thing?
[12:56:45] <micges> I have 32000 encoder on it
[12:59:25] <micges> and 8Nm motor :)
[12:59:35] <SWPadnos> on the cylinder? ;)
[12:59:55] <micges> no sorry on table ;P
[13:00:05] <SWPadnos> heh
[13:00:18] <micges> I take some pics
[13:00:21] <micges> moment
[13:07:10] <micges> http://imagebin.org/23448
[13:07:26] <micges> on the left is that cyl
[13:07:43] <micges> above it is the max y position possible
[13:08:44] <SWPadnos> so when you mov eto max Y, you have to use the cylinder instead of the motor to move X?
[13:08:47] <SWPadnos> move to
[13:09:46] <micges> whn I move to max y, y is locked and moving y then is making move of cylinder
[13:10:01] <SWPadnos> oh. interesting
[13:10:37] <micges> Its simple but I need xyz preview of moving rotary axis
[13:11:45] <micges> switching from/to rotary is done
[13:13:41] <SWPadnos> oh, the cylinder is a rotary?
[13:18:50] <micges> sory my mistake
[13:19:11] <micges> that cylinder is y axis rolled in
[13:19:34] <micges> hard to explain
[13:19:58] <SWPadnos> heh
[13:20:21] <micges> cilinders are 100mm to 300mm radius
[13:21:08] <micges> we control scale in a way that 1mm in program is 1mm on board regardless radius size
[13:25:15] <SWPadnos> oh, cool
[13:28:26] <rayh> I know that jewelers often do the same thing. Define one rotation of the rotary as a fixed distance on the flat.
[13:29:08] <SWPadnos> I'll bet that makes faceting a lot simpler to think about :)
[13:29:26] <micges> yup
[15:14:33] <skunkworks_> would the usb-printer port pins be usable in halinput?
[15:14:45] <SWPadnos> no
[15:15:02] <SWPadnos> there may be a way to make it work, but it isn't implemented at the moment
[15:15:07] <skunkworks_> ok
[15:15:12] <skunkworks_> just wondering
[15:24:20] <SWPadnos> actually, with custom hardware, a USB parallel port could be made to work, and it would remove the realtime dependency
[15:24:46] <SWPadnos> for outputs anyway
[15:25:02] <SWPadnos> you just make a device that clocks out the data at 1MHz, and you send ~1k samples every USB cycle
[15:25:05] <cradek> except for the plugs on it, the custom hardware would be nothing like a commercial usb to parallel port
[15:25:18] <SWPadnos> no, in addition to the USB adapter ;)
[15:25:20] <cradek> and would cost more than 1 pound
[15:25:29] <SWPadnos> or even 25
[15:48:10] <jepler> yeah, way back when I wondered about sending waveforms to a usb interface chip like ft232 -- but it has a small (128 byte) buffer, so you are pretty likely to underflow even if you represent one waveform sample in one byte. At 50kHz sample rate you only get 2.5ms of buffer.
[15:49:43] <jepler> though with the current ubuntu "-rt" kernel I think you can meet 1ms deadlines in userspace programs without trouble..
[15:49:50] <SWPadnos> you'd need USB2 also (for 1us samples), since the amount of data is 3M/sec
[15:50:19] <SWPadnos> oh, the -rt kernels are good down to ~25 us a lot of the time
[15:50:33] <SWPadnos> (jitter, not loop rates)
[15:51:37] <jepler> seems like this doesn't solve the differing clock rate problem either
[15:52:04] <SWPadnos> no, you'd need to do some calibration
[15:52:29] <SWPadnos> USB is supposed to be very accurate though, something like 1.000 ms +/- 0.5 us
[15:52:50] <SWPadnos> not that it always is, but the spec is something like that
[15:53:23] <jepler> well -- somebody with lots of technical expertise should let us know how it turns out
[15:53:26] <SWPadnos> heh
[22:07:50] <SWPadnos> jepler and alex_joni (and anyone else interested): is there a new planned release date for 2.2.6?
[22:08:07] <SWPadnos> also, did we ever decide on how to organize vendor configs?
[22:08:42] <BigJohnT> I have a bit more work to do on the manuals this weekend
[22:08:55] <SWPadnos> I'd like to check in the Tormach PCNC-1100 config, I think it's basically done
[22:09:04] <SWPadnos> cool thanks for all that work
[22:09:09] <BigJohnT> np
[22:09:16] <SWPadnos> (I should lolk at the results before thanking you though ;) )
[22:09:28] <SWPadnos> nah - thanks, even if I don't like the changes :)
[22:09:52] <BigJohnT> :)
[22:10:29] <BigJohnT> I hope the manuals are a bit better when I'm done :)
[22:10:34] <SWPadnos> me too ;)
[22:10:39] <SWPadnos> I'm sure they are
[22:38:41] <pmbdk> do you guys have some kind of todo page for developers?
[22:39:31] <pmbdk> i would really like to help out somewhere (although currently i'm really a newbie so...) but I wouldn't know where to start...
[22:39:51] <SWPadnos> the sourceforge page has bug and feature request trackers
[22:40:02] <SWPadnos> there's also information on the wiki, though I don't recall exactly where at the moment
[22:40:07] <pmbdk> obviosly I would like to implement my hexapod-thingie first, but i'm closing in now, and would like to give something back...
[22:40:42] <SWPadnos> if you look at the Fest 2007 and Fest 2008 pages, they also have lists of things we wanted to do/discuss, only some of which were actually done'discussed ;)
[22:40:44] <SWPadnos> cool
[22:44:16] <CIA-35> EMC: 03swpadnos 07v2_2_branch * 10emc2/configs/sim/sim-xyyz.hal: Fix typo in XYZ velocity calc connections
[22:49:01] <SWPadnos> does anyone want to keep the current setup with two hypots, or is it OK for me to change the samples in TRUNK to use only 1?
[22:50:12] <BigJohnT> I'd say make it correct
[22:50:36] <SWPadnos> me too, but there may be intentions of using XYVel for something else
[22:50:52] <SWPadnos> then again, one could always add another hypot and connect only x+y vels to it :)
[22:51:02] <SWPadnos> (same effect - 2 hypots)
[22:52:40] <pmbdk> if XYvel is removed, wouldnt this mean that if anyone actually used it, they would quickly see that it wasn't there anymore? :-)
[22:53:26] <pmbdk> and I guess 1 hypot is better than 2... Although only marginally... _Really_ marginally... :)
[22:54:02] <SWPadnos> the sqrt function likely takes a few cycles, as does the cache fill (but yes, it is marginal :) )
[22:54:25] <SWPadnos> the idea is to simplify the way the files look though - it's better if they're easier to follow
[22:54:34] <pmbdk> yep
[22:54:45] <pmbdk> * pmbdk goes to bed...
[22:56:36] <BigJohnT> the more comments in the configs the better
[22:57:06] <SWPadnos> yes, to a point
[22:57:21] <SWPadnos> for a lot of people, big files are equivalent to confusing files
[22:57:38] <SWPadnos> even though the extra text may be telling them useful information - it's like they refuse to read it
[22:57:46] <jmkasunich> "too many words, my wittle brain can't fit them all"
[22:57:50] <SWPadnos> yep
[22:57:55] <SWPadnos> I'd rather be hunting wabbits
[22:57:59] <SWPadnos> err - wather
[22:58:07] <BigJohnT> I agree there is no need to comment the easy stuff but a brief comment at the start of each section helps
[22:58:21] <jmkasunich> definitely
[22:58:27] <SWPadnos> yep, for sure
[22:58:59] <SWPadnos> I don't particularly like to cater to the wittle bwain folks, but I know I also get annoyed/frustrated if I have to search through 100k of text when 10k might have sufficed
[22:59:07] <jmkasunich> I tend to be of the "more is better" school when it comes to comments
[22:59:23] <SWPadnos> then again, I'm the kind of guy who would write 100k when 10k would have sufficed ;)
[22:59:50] <SWPadnos> yes, I'm that was most of the time, but I can sympathize that looking at 99k of chaff to get to the 1k of wheat is mind-numbing
[23:00:05] <BigJohnT> but if you can drill down to the 10k you need fast...
[23:00:09] <jmkasunich> it takes a good writer to describe in 10K what a bad writer describes in 100K, and what a worse "writer" doesn't bother to describe at all
[23:00:14] <SWPadnos> well, that's different ;)
[23:00:26] <BigJohnT> :)
[23:03:50] <BigJohnT> sounds like the wife is awake from her Friday afternoon nap ttul
[23:04:01] <SWPadnos> heh - see you
[23:11:32] <SWPadnos> well, maybe I'll watch amovie or something. bbl
{kind=link}
{kind=link}