Back
[00:19:46] <jepler> so having studied those usdigital pages on encoders, I think they're intended to have the index signal lie entirely in a region without A/B transitions
[00:21:09] <jepler> I can see why this would be desirable but it's trouble for the pluto for home-to-index
[00:27:43] <jepler> so maybe I will have to add a bit to report "index occurred during this polling period" independent of the count-of-last-index reporting
[00:28:47] <jepler> * jepler thinks it over
[01:00:58] <SWPadnos_> SWPadnos_ is now known as SWPadnos
[03:40:46] <skunkworks_> I just got a little time to play with the servo. I scaled the pluto pwm so 1.666 gave me 600rpm which is 100ipm
[03:42:25] <skunkworks_> Now the error during cruise was still .0008/.0009 - so I started playing around with ff1. now ff1 seems to only effect accel - decel phase from what I can see. - back to the only thing that seems to offset the cruise error is ff0.
[03:43:14] <skunkworks_> but the way I understand it - as I move further away - the error will increase
[03:43:19] <skunkworks_> using ff0
[03:43:38] <skunkworks_> atleast that is what I understood anyways - don't know if I have seent that
[03:57:20] <cradek> something is screwy. ff2 is the one that should affect the accel phases, ff1 affects the cruises
[03:59:35] <skunkworks_> hmm
[03:59:40] <skunkworks_> then I don't know
[03:59:47] <skunkworks_> Hi cradek
[04:00:44] <skunkworks_> it looks correct in the hal file.
[04:00:54] <skunkworks_> setp pid.0.FF0 [AXIS_0]FF0
[04:01:04] <skunkworks_> setp pid.0.FF1 [AXIS_0]FF1
[04:01:15] <skunkworks_> setp pid.0.FF2 [AXIS_0]FF2
[04:01:43] <skunkworks_> I change it in the configure menu item..
[04:01:51] <skunkworks_> to test
[04:03:08] <skunkworks_> or is it calibrate.
[04:03:32] <skunkworks_> * skunkworks_ isn't in front of it right now. actually at work
[04:25:22] <skunkworks_> oh - time to drive home.
[04:25:26] <skunkworks_> bbl
[12:26:52] <Guest406> Guest406 is now known as skunkworks_
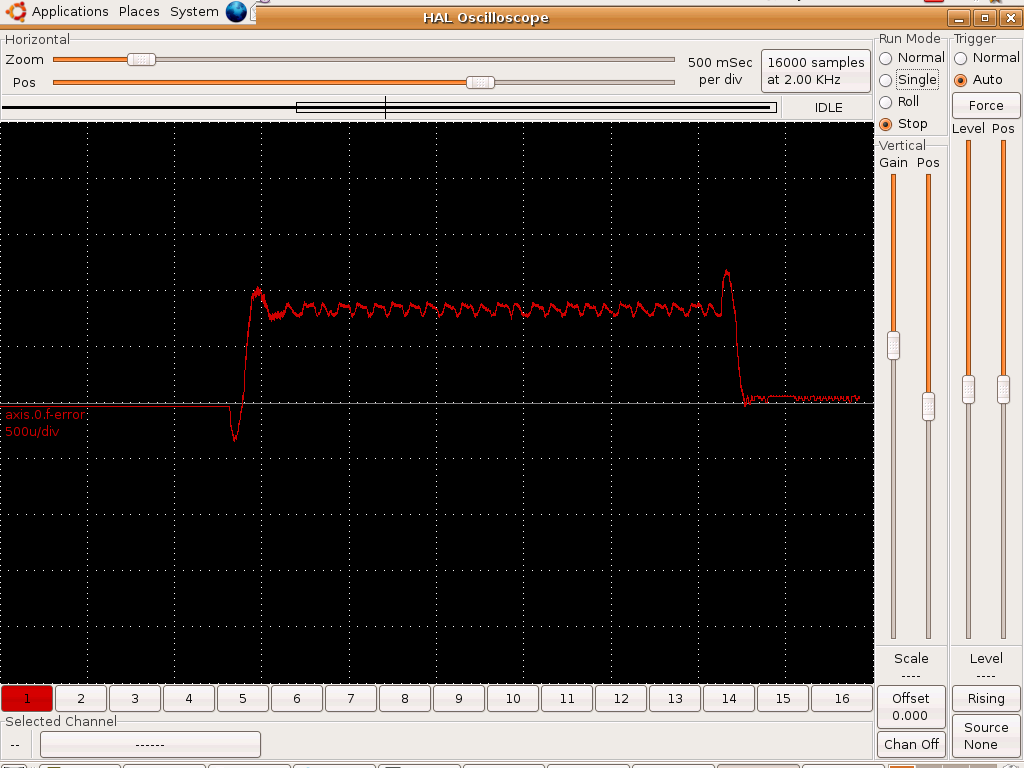
[12:27:10] <skunkworks_> following error just pid
http://www.electronicsam.com/images/KandT/servostart/tune/ferrorpid.png
[12:27:25] <skunkworks_> folloing error pid + ff0
[12:28:02] <skunkworks_> just ff0
[12:28:03] <skunkworks_> http://www.electronicsam.com/images/KandT/servostart/tune/ferrorff0.png
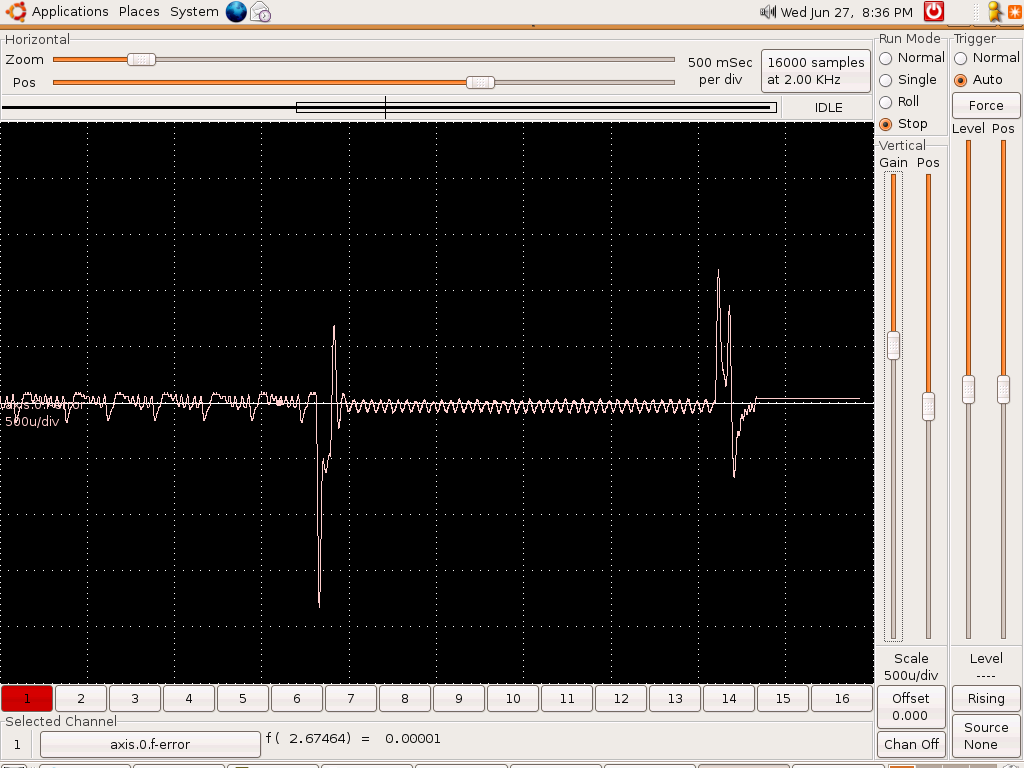
[12:28:23] <skunkworks_> following error pid + ff1 (just ff1)
[12:28:55] <skunkworks_> http://www.electronicsam.com/images/KandT/servostart/tune/ferrrorff1png
[12:29:06] <skunkworks_> (wasn't actually tuning - just seeing the effect.)
[12:30:10] <skunkworks_> pid + ff2 (just ff2)
[12:30:11] <skunkworks_> http://www.electronicsam.com/images/KandT/servostart/tune/ferrrorff1png
[12:32:24] <skunkworks_> So I don't understand - I have not changed any of the hookups in the hal file. (lathe_pluto) I double checked doing a show to make sure what I was entering was actually the value on the individual pins. (P, I, D, FF0, FF1, FF2) and that was correct.
[12:34:00] <skunkworks_> sorry - ff2 picture should have been
http://www.electronicsam.com/images/KandT/servostart/tune/ferrrorff2.png
[12:52:55] <skunkworks_> logger_dev: bookmark
[12:52:55] <skunkworks_> Just this once .. here's the log:
http://www.linuxcnc.org/irc/irc.freenode.net:6667/emcdevel/2007-06-29.txt
[17:40:46] <SWPadnos> you say goodbye, and I say hello
[17:42:18] <skunkworks_> hello hello. I don't know why you say good bye, I say hello.
[17:42:23] <skunkworks_> great - now that is in my head
[17:42:30] <SWPadnos> heh
[17:47:51] <skunkworks_> SWPadnos: Did you get your servo mounted?
[17:48:02] <SWPadnos> nope
[17:48:13] <SWPadnos> I did get a larger cabinet for the control sthough
[17:48:25] <SWPadnos> 36x22" - that should hold it all
[17:49:40] <skunkworks_> Nice
[17:50:09] <SWPadnos> the bummer about that is that the auction was listed as a NEMA12 enclosure, and it's actually only NEMA4
[17:50:19] <SWPadnos> (watertight, not oiltight)
[17:50:46] <skunkworks_> darn
[17:50:54] <SWPadnos> yep
[17:50:57] <skunkworks_> ebay?
[17:51:02] <SWPadnos> I may be able to change the seal to get NEMA12
[17:51:04] <SWPadnos> yes
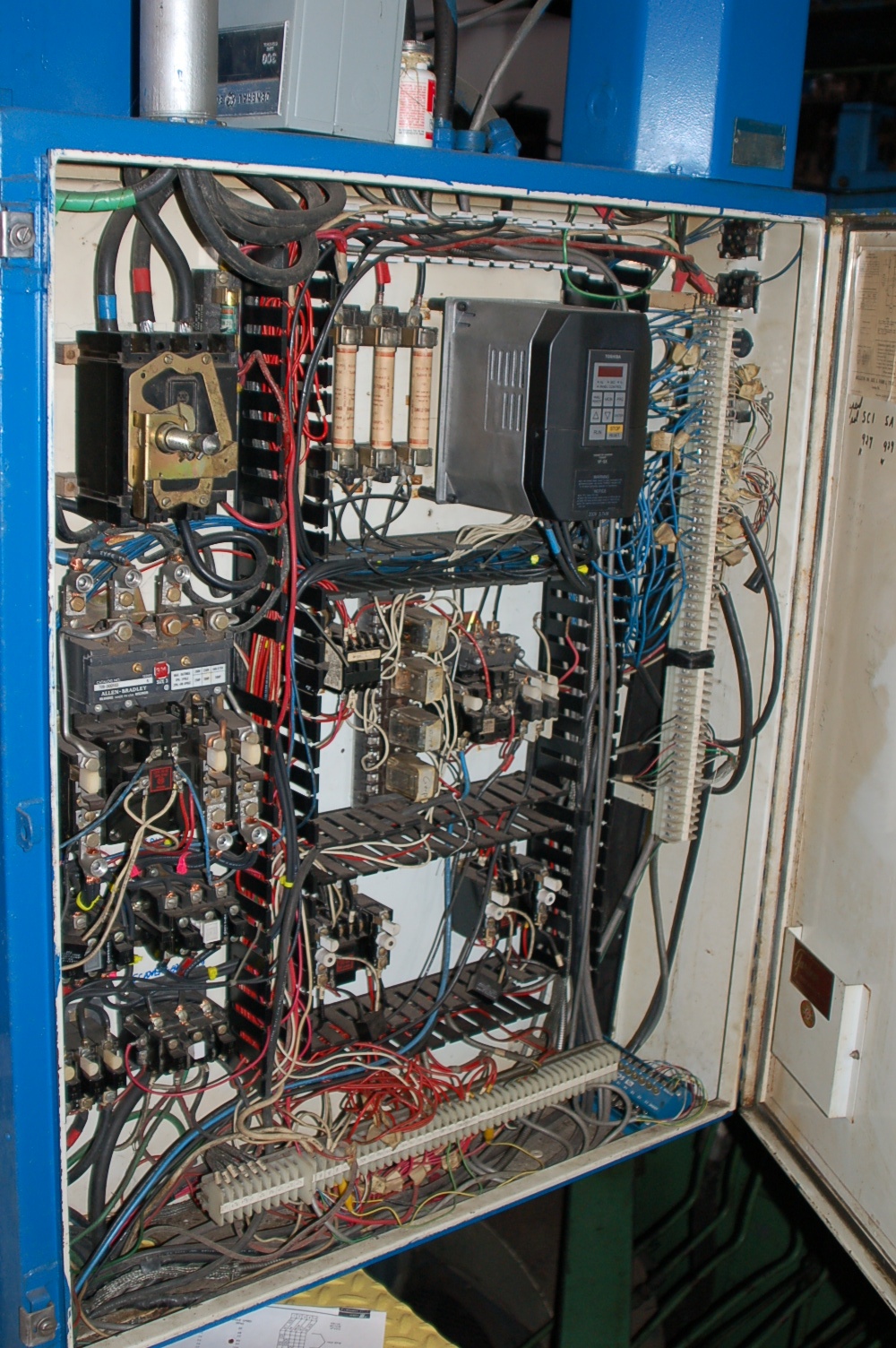
[17:51:20] <skunkworks_> we are hoping to fit a lot of stuff in here
http://www.electronicsam.com/images/KandT/conversion/mainelectricalbox.JPG
[17:51:55] <SWPadnos> ooooh - nice and tall
[17:52:01] <SWPadnos> looks like ~24x48 or so
[17:52:08] <skunkworks_> because we won't be needing most of the stuff that is in there.
[17:52:17] <SWPadnos> is that a VFD in there?
[17:52:20] <skunkworks_> yes
[17:52:22] <skunkworks_> 5hp
[17:52:26] <SWPadnos> cool
[17:52:32] <skunkworks_> used to have a hydraulic spindle.
[17:52:36] <SWPadnos> it must be bigger than 24x48 then ;)
[17:52:53] <skunkworks_> I would have to say 48X48 without measureing
[17:52:58] <SWPadnos> it doesn't look square to me
[17:53:20] <skunkworks_> hmm - I would have to measure it :) maybe 36X48
[17:53:34] <SWPadnos> yep, or 36x60 maybe
[17:56:06] <skunkworks_> toshiba vfd. no issues so fart.
[17:56:10] <skunkworks_> ;)
[17:56:11] <skunkworks_> far
[18:04:27] <skunkworks_> I think it takes a +/-10 volt signal also - which should be fun to play with. we just pretty much set it up to work with what was there - so it was setup for 2 speeds.
[18:11:28] <jepler> so in the long run you'll be wanting one of these pwm-to-analog modules too
[18:11:44] <skunkworks_> Yes :)
[18:12:42] <skunkworks_> I will be testing the pluto this weekend.. I can also test homing to an index.
[18:27:54] <alex_joni> any idea why I get Unexpected realtime delay on task 1
[18:27:59] <alex_joni> without any other info?
[18:30:02] <skunkworks_> I get that when I don't do the smi patch.
[18:30:26] <jepler> alex_joni: in TRUNK?
[18:30:32] <skunkworks_> both realtime delay - then a unexpected realtime delay in task 1
[18:30:32] <alex_joni> jepler: yes
[18:30:33] <skunkworks_> yes
[18:30:51] <alex_joni> no realtime delay here, only the task 1 one
[18:31:00] <jepler> int result = rt_task_wait_period();
[18:31:00] <jepler> if(result != 0) {
[18:31:04] <jepler> rtapi_print_msg(
[18:31:04] <jepler> error_printed == 0 ? RTAPI_MSG_ERR : RTAPI_MSG_WARN,
[18:31:04] <jepler> "RTAPI: ERROR: Unexpected realtime delay on task %d\n",
[18:31:04] <jepler> rtapi_task_self());
[18:31:16] <jepler> this was added relatively recently by me
[18:31:26] <jepler> rtapi says it missed its scheduling deadline -- "task 1" is probably the fast task
[18:31:32] <alex_joni> I see
[18:31:51] <jepler> er, rtai says ..
[18:35:09] <alex_joni> * alex_joni wonders if he should say anything or just swallow it down :)
[18:35:48] <alex_joni> I'm able to jog about 10 times faster then G0
[18:42:34] <jepler> non-trivkins? can't say I'm surprised
[18:43:52] <alex_joni> jepler: me neither :)
[18:50:36] <Guest736> Guest736 is now known as skunkworks_
[19:21:33] <alex_joni> skunkworks_: it's not SMI here.. no such device
[19:23:06] <skunkworks_> hmm.. so what else? any usb devices plugged in? shared memory video? at the workshop someones audio card was causing the problem
[19:25:14] <alex_joni> it seems to be fine..
[19:25:23] <alex_joni> rtai latency test reports no overruns
[19:25:33] <skunkworks_> now that is odd.
[19:25:36] <alex_joni> 16438 ovl_max
[19:25:43] <skunkworks_> that is pretty good
[19:26:19] <skunkworks_> does it have the installed emc also? does that give you the same error?
[19:26:56] <jepler> alex_joni: the latency test uses a fairly large period -- 100uS or 1ms, I forget which
[19:27:01] <jepler> alex_joni: what kind of BASE_PERIOD are you running?
[19:28:14] <jepler> 16438ns latency doing nothing + 4000ns for parport writes = 20438ns total for base_period
[19:28:38] <alex_joni> I think I set 25000
[19:28:52] <alex_joni> I'l try increasing it a bit
[19:29:04] <jepler> if things work OK you could simply comment out that message :-P
[19:29:45] <alex_joni> hmm.. no message at 50000
[19:29:59] <skunkworks_> I was getting it with just a 1ms servo period..
[19:30:59] <alex_joni> I get it at 28000, but not at 29000 for the BASE_THREAD
[19:31:23] <jepler> what kind of max time do you see for base thread?
[19:31:43] <jepler> (the info in 'show thread' is in cycles, not ns, I think)
[19:40:49] <alex_joni> cycles, right
[19:40:53] <alex_joni> let me run it again
[19:41:52] <alex_joni> 28495 NO base-thread ( 9623, 24177 )
[19:42:29] <jepler> about a 2GHz machine?
[19:43:50] <alex_joni> 1.4 GHz athlon
[19:44:18] <alex_joni> cpu MHz : 1052.468
[19:44:24] <alex_joni> wonder if that's accurate
[23:44:30] <skunkworks> so far the new pluto firmware is working for what I have setup so far :) nice work
{kind=link}
{kind=link}
{kind=link}
{kind=link}