Back
[00:03:55] <SWPadnos> apparently
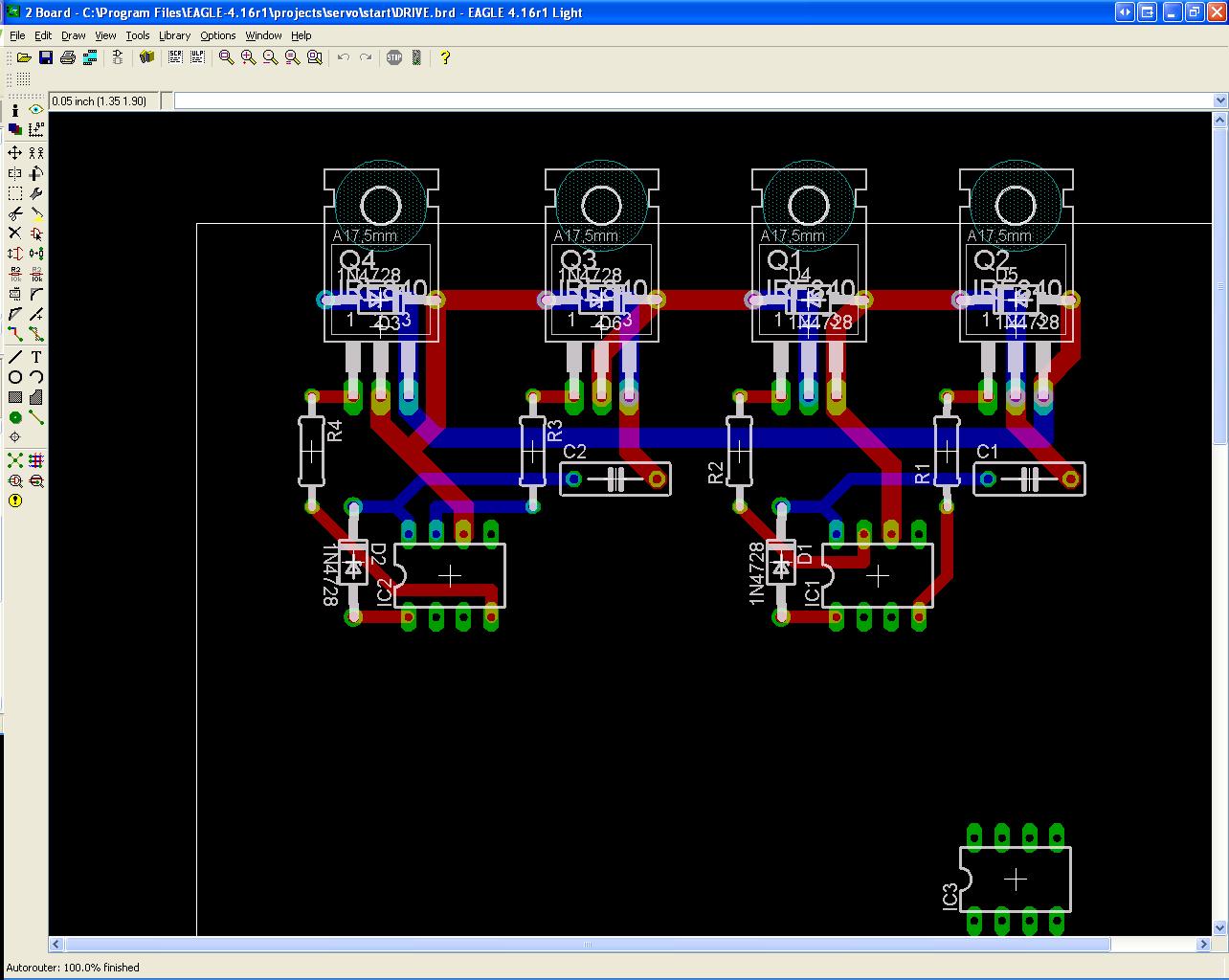
[00:21:56] <skunkworks> jmkasunich: A start with eagle.
http://www.electronicsam.com/images/KandT/eagle.JPG
[00:22:48] <SWPadnos> what are the 3 ICs?
[00:23:25] <jmkasunich> gate driver chips
[00:23:31] <jmkasunich> (2 of em anyway)
[00:23:46] <skunkworks> opto isolator is the 3rd
[00:23:50] <skunkworks> duel
[00:23:51] <SWPadnos> ah, OK
[00:24:13] <jmkasunich> you put the low side fets on the outside and the high side ones in the middle?
[00:24:59] <skunkworks> is that odd? is seemed to be odd how ever I did it.
[00:25:06] <jmkasunich> not odd
[00:25:46] <jmkasunich> because ground bounce (from L * dI/dT) is more important than noise on Vmotor, I'd probaly put the low side fets in the middle to keep the ground trace short
[00:26:01] <jmkasunich> but I'm probalby just being anal, at low power its not so important
[00:26:43] <skunkworks> well it is easy to do with eagle. having a fun time with it ;)
[00:28:35] <skunkworks> and thanks for all your pointer
[00:28:38] <skunkworks> pointers
[00:28:48] <jmkasunich> you're welcome
[00:28:54] <jmkasunich> have fun
[00:49:58] <jepler> skunkworks: are you working just from the board, or are you using the schematic editor?
[02:49:54] <skunkworks> jepler: I am making the schematic - it is pretty easy that way. don't hardly have to think ;)
[02:51:46] <skunkworks> I can visualize the schematic easier than trying to make the board. Then it is just moving the parts around on the board for the best fit.
[02:52:03] <skunkworks> (atleast that is what I have done so far)
[02:52:55] <skunkworks> if this works semi-decent - I will post the board and circuit.
[02:53:10] <jepler> just wondering because you'd only shown the picture of the board
[02:53:26] <jepler> much of eagle's power comes from back-annotation, so you can iteratively develop the schematic and layout at the same time
[02:53:31] <jepler> g'night
[02:54:37] <skunkworks> night
[21:16:09] <jmkasunich> I chased him away
[21:18:23] <jmkasunich> duh, actually you could do each 8 outputs with a write to the data port and _one_ write to the control port, plus a single write at the beginning
[21:18:48] <cradek> so assuming I can hook up the home switches in hal, how does homing work?
[21:19:15] <cradek> on my machine when I hit home, there is no motion and the world coords just reset to zero.
[21:19:41] <cradek> what do I do different to make it move?
[21:19:54] <jmkasunich> there are params in the axis sections of the ini that tell it how to home
[21:20:08] <cradek> ok
[21:20:12] <jmkasunich> document (well I might add) in emc2_code_notes.pdf
[21:20:22] <cradek> great
[21:20:42] <cradek> sounds easy
[21:20:43] <jmkasunich> now if I can just find that file
[21:20:53] <cradek> I assume it's in /documents somewhere?
[21:21:11] <cradek> * cradek grumbles about pdfs
[21:21:15] <jmkasunich> http://linuxcnc.org/index.php?option=com_content&task=view&id=5&Itemid=5&lang=en
[21:21:22] <jmkasunich> the "How EMC works" link
[21:21:28] <jmkasunich> whats wrong with pdfs?
[21:21:57] <cradek> they don't have hypertext, for one thing
[21:22:06] <cradek> they're a lousy format for browsing online
[21:22:13] <jmkasunich> homing info starts on page 20
[21:22:52] <jmkasunich> are there any net-friendly vector graphics formats?
[21:22:54] <cradek> cool
[21:23:10] <jmkasunich> for me, the strong point of pdfs is drawings that don't get all pixelated
[21:23:11] <cradek> not really, just rasterized png.
[21:23:26] <jmkasunich> I want 300dpi quality in drawings
[21:23:48] <cradek> but your screen is 75 dpi...
[21:23:52] <cradek> maybe 100
[21:23:57] <jmkasunich> I can zoom
[21:24:47] <cradek> ok so I have velocity=0 which causes the search to not happen
[21:25:05] <jmkasunich> right
[21:25:48] <jmkasunich> the sign of search_vel is chosen based on which end of travel your home switch is on
[21:25:51] <cradek> so you can home on a limit switch
[21:25:55] <jmkasunich> yes
[21:26:37] <cradek> good, this might just have limits
[21:28:41] <jmkasunich> latch_vel should be less than one encoder count (or step) per servo_period for best accuracy
[21:29:05] <jmkasunich> search_val can be high, the only requirement is that you can stop before crashing when you hit the switch
[21:32:00] <cradek> I don't know if any velocity is high on a sherline...
[21:32:05] <jmkasunich> heh
[21:32:47] <jmkasunich> you can get to 10KHz steps can't you?
[21:36:27] <jmkasunich> btw, I was reading CIA docs today...
[21:36:42] <jmkasunich> there's actually an XML format defined for results from build systems like the farm
[21:37:02] <cradek> cool
[21:37:03] <jmkasunich> but reading the source, it looks like they haven't actually implemented it yet
[21:37:06] <cradek> there are docs? :-)
[21:37:21] <jmkasunich> I sent an email to the author/maintainer asking about it
[21:37:32] <jmkasunich> not really docs
[21:37:40] <jmkasunich> just an XML schema file
[21:45:01] <cradek> hmm, someone else wants arbitrary arcs, that's interesting
[21:45:22] <jmkasunich> yeah
[21:45:27] <cradek> hope I didn't just volunteer to do it with my response :-/
[21:45:36] <cradek> I do think we should talk about it though
[21:45:36] <jmkasunich> g-code extensions anyone?
[21:45:42] <cradek> yep
[21:46:55] <cradek> I challenged him to write a spec so we have something to talk about
[21:47:01] <jmkasunich> good idea
[21:48:08] <jmkasunich> I was goofing off at work today, made a couple of 32x32 pngs, one green with a check and one red with an X
[21:48:14] <jmkasunich> for the compile farm results table
[23:02:03] <cradek> wankity wank
[23:02:20] <cradek> err, I mean, I think the text is fine
[23:02:29] <jmkasunich> lol
[23:05:54] <cradek> gotta run, be back later/tomorrow
[23:06:18] <jmkasunich> bye
{kind=link}