Back
[00:45:09] <tarzan> Jymmm, simple switch not enough?
[00:54:27] <eric_unterhausen> it's nice when firefox puts out the occasional release that doesn't have resource problems, to bad the current one does
[01:17:55] <tom3p> in, stepconf, when i 'test this axis' (any) , i get no motion, but when i run emc2, all is fine.(emc2 2.3.4) i've tried all parports.
[01:27:23] <Jymmm> tarzan: for what?
[01:43:59] <MarkusBec> MarkusBec is now known as MarkusBec_away
[01:51:27] <andypugh> tom3p it sounds like stepconf perhaps isn't loading a module that emc is.
[01:55:03] <tom3p> andypugh: hmm, i use stepconf to set up this system, then upgraded to 2.3.4.(it used to work).
[01:55:04] <tom3p> i dont know how to find out which modules are needed by stepconf.
[01:56:16] <andypugh> Once it is working the time soon arrives when you dare not use stepconf any more anyway, as it breaks hand-built changes
[01:57:10] <MrSunshine__> hand built changes?
[01:57:14] <MrSunshine__> how does it break stuff? :)
[02:10:11] <andypugh> If you edit the ini file, then re-run stepconf, it overwrites your changes
[02:11:55] <MrSunshine__> oh
[02:11:58] <MrSunshine__> well thats not good
[02:12:03] <MrSunshine__> have to think of that if i do that :)
[02:12:14] <MrSunshine__> is there a warning in the beginning of stepconf for that? )
[02:16:34] <andypugh> Yes, if you have made changes it warns you that they will be over-written
[02:17:06] <andypugh> Also, you have the option of putting things in custom.hal, which isn't changed by stepconf
[02:17:36] <andypugh> My custom.hal unlinks a number of pins then reconnects them through some low-pass filters, for example
[02:17:55] <tarzan> Jymmm, replacing the encoder
[02:23:10] <tom3p> andypugh: argh, its not that stepconf 'ruins' existing , it wont move anything, even with a brand new cfg using old as template. (stepconf doesnt ruin anything, like a text editor doesnt ruin your orignal file) )
[02:24:47] <tom3p> hello, stepconf wont move any axis, given a brand new config, using a printed version of a succesful cfg as template. run from a terminal, i see no errs.
[02:47:17] <Jymmm> tarzan: no, those are for controls, like volume, selection, etc
[05:22:20] <eric_mill> so to use pncconf, I have to check it out of the repository?
[05:40:16] <kanzure_> kanzure_ is now known as kanzure
[05:48:11] <eric_mill> c compiler cannot create executables?
[05:51:15] <eric_mill> anyone know where emc scripts live in a live cd install?
[05:57:48] <eric_mill> I'm going to go upstairs and answer myself so I don['t feel so all alone
[06:03:00] <eric_mill> kinda rude to have a .configure that doesn't allow you to un-configure something as specialized as modbus
[06:05:01] <eric_mill> been a while since I had this much trouble installing a repository
[06:06:29] <eric_mill> anyone know what glib is?
[06:07:02] <eric_mill> gnome library
[06:10:57] <tom3p> i dont know where scripts are on live-cd install. its common to upgrade using git, and after upgrading, its difficult to tell where things were before updating.
[06:13:12] <tom3p> i cant succesfully run stepconf.
[06:13:21] <tom3p> i had a bout of fork bombs and limited the forks to 100 or 150.
[06:13:22] <tom3p> does stepconf need a lot of forks?
[06:14:01] <eric_unterhausen> doesn't seem likely
[06:14:19] <eric_unterhausen> python is interpreted though, isn't it?
[06:14:55] <tom3p> eric_unterhausen: any idea why stepconf wont move an axis (any) but emc2 runs fine?
[06:15:38] <tom3p> yes python is interpreted, but it can 'exec'
[06:16:11] <eric_unterhausen> I was thinking stepconf wasn't loading modules properly
[06:16:37] <tom3p> i run it from a terminal, and i see no errs
[06:16:55] <eric_unterhausen> tom3p: I was thinking the interpreter may fork
[06:17:43] <eric_unterhausen> I was hoping that pncconf was in the new release, but I guess not
[06:18:15] <eric_unterhausen> going through figuring out how to build emc just to get it seems like it might not be the best use of my time
[06:18:41] <tom3p> well, i'm gonna un-implement the suggested ubuntu fix for fork bombs and see if stepconf runs again...
[06:18:56] <tom3p> what's pncconf?
[06:19:04] <eric_unterhausen> stepconf for servos
[06:19:25] <tom3p> ah! good, will be needing that, thx
[06:19:35] <eric_unterhausen> well too bad then :)
[06:20:11] <eric_unterhausen> actually, I was trying to find the source and failed
[06:20:42] <eric_unterhausen> wiki says it's in trunk, but I'm not sure how to git trunk
[06:23:13] <tom3p> eric_unterhausen: i just checked, its in my few day old git checkout, in ~/emc2-dev/src/emc/usr_intf/pncconf/
[06:23:38] <tom3p> pncconf.py
[06:23:57] <eric_unterhausen> I was too lazy to enable ssh, so I'll have to walk back downstairs
[06:28:02] <roh> tom3p do you have a charge_pump lockout which isnt released?
[06:33:30] <tom3p> roh: i dont think so, the machine runs fine under emc2, but wont move under stepconf. the conf used is the same for both apps.
[06:34:02] <roh> i have the same effect
[06:34:29] <tom3p> you cant run stepconf? yet can run emc2?
[06:35:41] <roh> also i need to press sw-emerg-off once while hw-estop is enganged once after start of axis to get the chargepump engaged, and then release hw-estop and power on emc
[06:37:30] <tom3p> roh: ok, you have some sequence problem, i think thats different.
[06:37:37] <roh> s/power on emc/power_on the 'machine' in axis/g
[06:38:22] <roh> i dunno if its a problem.. but it makes sure you do one 'routine' procedure involving something which makes sure the estop chain is working both ways on power-up
[06:38:47] <roh> means press the button if not pressed, and release it, see it change states
[06:39:50] <tom3p> roh: so , it's an intentional device to make sure the user is awake/responsible ?
[06:40:20] <roh> ive got no clue, but if its not, there should be something like that as option ;) just better documented by dialogues
[06:40:42] <roh> like 'press estop' 'release estop' 'check ok'
[06:41:45] <tom3p> i just took out the additions to /etc/security/limits.conf do i need to restart or re-login to get new rules ( or lack of ) ?
[06:42:44] <tom3p> roh: are you speaking about the little sequence of button pushing at begin of axis/tkemc ? ( not at all intuitive coming from real machines )
[06:47:05] <tom3p> still cant get stepconf to move any axis, so will log out maybe need to reboot
[06:54:54] <tom3p> re: stepconf wont move any axis, yet emc2 works fine. removing fork spawn limits in /etc/security/limits.conf, did not help after logout, will try rebooting linux next
[07:11:38] <tom3p> re: stepconf wotn move any axis, yet emc moves fine:.. i removed the fork limits in /etc/security/limits.conf, and had to reboot unubtu. now i finally have some errs in terminal running stepconf.
http://pastebin.ca/1681998
[07:12:26] <tom3p> any plumbers around?
[07:24:06] <tom3p> re: stepconf wont move any axis, yet emc runs fine: the errors seen were due to address typo. after fixing parport addr to 0xa800, the original problem persists, no motion on step conf, good motion in emc, no errors in terminal used to run stepconf.
[07:25:33] <tom3p> i do get these error before the stepconf dialog begins:
[07:25:55] <eric_unterhausen> that's strange
[07:26:04] <eric_unterhausen> but does it output a config file?
[07:26:53] <tom3p> ... /usr/bin/stepconf:1142: Warning: g_path_get_dirname: assertion `file_name != NULL' failed
[07:26:53] <tom3p> self.xml = gtk.glade.xml_new_from_buffer(doc, len(doc), domain="axis")
[07:27:09] <tom3p> ... /usr/bin/stepconf:1142: GtkWarning: gdk_pixbuf_new_from_file: assertion `filename != NULL' failed
[07:27:09] <tom3p> self.xml = gtk.glade.xml_new_from_buffer(doc, len(doc), domain="axis")
[07:27:21] <tom3p> .. /usr/bin/stepconf:1142: Warning: g_object_unref: assertion `G_IS_OBJECT (object)' failed
[07:27:21] <tom3p> self.xml = gtk.glade.xml_new_from_buffer(doc, len(doc), domain="axis")
[07:28:03] <tom3p> eric_unterhausen: i didnt bother to output a file, esp since i dont know it it looked like good motion
[07:30:38] <tom3p> crap 1:30 am and it still wont move
[07:49:13] <eric_unterhausen> now that I'm on my 10th error in configure, I'm starting to remember this buckwas from the last time I built emc
[07:49:28] <eric_unterhausen> maybe I should write down some notes in the wiki
[07:56:31] <eric_unterhausen> build fails for some dependency on xinerama
[07:57:04] <eric_unterhausen> so I guess we need to think about the guys that need multiple screens on their toy cnc routers
[08:00:19] <eric_unterhausen> I'd say that's rather broken
[08:02:18] <eric_unterhausen> /usr/bin/ld: cannot find -lXinerama
[08:21:45] <eric_unterhausen> is there really a command named "none" ?
[08:24:07] <eric_unterhausen> /bin/sh: none: not found
[08:24:53] <celeron55_> i had the same error... i wonder how i fixed it
[08:26:11] <eric_unterhausen> apt-get install stupidly_named_linux_commands
[08:26:22] <celeron55_> there's no command named that
[08:26:58] <celeron55_> i can't remember it properly but i guess it was the configure script not finding a program and leaving the name of it to 'none'
[08:27:04] <celeron55_> or something like that
[08:27:19] <eric_unterhausen> is there a way to unconfigure?
[08:27:35] <celeron55_> ...?
[08:29:08] <eric_unterhausen> Xaw lib is missing
[08:29:09] <celeron55_> i'm not sure if i had to install something or edit configure.in and run autoconf and then ./configure; make again
[08:29:38] <celeron55_> seems like it'd have been a good idea to write down what i did
[08:30:13] <celeron55_> i thought it wasn't something everyone will run into
[08:30:16] <eric_unterhausen> WARNING: GTK2 not found, some utilities
[08:30:54] <eric_unterhausen> will not be built
[08:31:30] <celeron55_> that's not relevant, though you won't get axis then
[08:35:58] <eric_unterhausen> it takes me about 20 repository installation before I remember I should take notes and put a page in the wiki so I don't have to go through this incredibly lame process again
[08:37:48] <celeron55_> aren't the dependencies listed anywhere?
[08:37:56] <eric_unterhausen> not that I could find
[08:38:32] <eric_unterhausen> installed libXaw7-dev and that fixed it
[08:40:01] <celeron55_> see "grep install /var/log/dpkg.log" after you have it working so you can list the packages
[08:40:24] <celeron55_> and put somewhere on the wiki
[08:41:18] <eric_unterhausen> that's a good idea, but it's full of fluff
[08:41:53] <eric_unterhausen> I had to go up 100 lines to get through the last 2 packages I installed
[08:42:39] <celeron55_> that's why you use 'grep install'
[08:43:38] <eric_unterhausen> that's not good enough
[08:43:44] <eric_unterhausen> the fluff has "install" in it
[08:44:58] <eric_unterhausen> the emc-environment script complains and says it only works in a run-in-place environment
[08:45:04] <celeron55_> how about 'sudo grep ':.. install' /var/log/dpkg.log'
[08:45:57] <celeron55_> if you specified an install prefix, you have to 'make install' and then used the installed one
[08:46:24] <celeron55_> if you didn't, it should be a run-in-place build and emc-environment shouldn't complain
[08:46:58] <eric_unterhausen> lotta things that shouldn't happen have happened
[08:47:15] <celeron55_> if it's an old version, then i think it is a non-run-in-place as default and installs to /usr/local or something like that
[08:47:34] <eric_unterhausen> the system was installed from a live cd
[08:47:44] <eric_unterhausen> so I have a regular system running
[08:49:39] <celeron55_> i think the people working on emc should be more active on this channel... at least they'd know things
[08:50:29] <eric_unterhausen> if ! test "xyes" = "xyes"; then
[08:50:37] <eric_unterhausen> wonder what that is supposed to mean
[08:50:52] <MrSunshine__> celeron55_, usaly devs shunt irc cause of all stupid questions they get all days long =)
[08:51:13] <celeron55_> well, now we'd have lots of good questions
[08:51:24] <eric_unterhausen> there is a lot of OT bs on here
[08:51:28] <MrSunshine__> they should have a day in week or someting alteast =)
[08:51:38] <MrSunshine__> so they still have time to code =)
[08:52:13] <celeron55_> eric_unterhausen: i was a bit surprised about how messy and unconfigurable the build system of emc is
[08:52:30] <eric_unterhausen> I was too
[08:52:40] <eric_unterhausen> although it's a lot better than it was
[08:52:43] <celeron55_> i just wanted to build emc without any of the X things, only keystick as an interface
[08:52:50] <celeron55_> i had to edit lots of things
[08:52:52] <eric_unterhausen> people have done a lot of work since the bad old days
[08:53:06] <eric_unterhausen> gotta sleep, gnite
[08:53:44] <MrSunshine__> i do not get it how to make emc know where my workpiece starts :/
[08:54:50] <MrSunshine__> sure if i had the table and could make it know where absolute 0 of the depth is .. but if i want to distance it upwards (to be able to cut clean throught the piece, drill etc) then what? .. and i still even if it was just the table do not know how to tell emc that this is the maximum depth you can go
[08:54:51] <MrSunshine__> =)
[08:55:02] <MrSunshine__> with only softlimits so far
[08:57:45] <celeron55_> http://www.linuxcnc.org/docs/EMC2_User_Manual.pdf
[08:57:49] <celeron55_> that's the user manual
[08:58:41] <celeron55_> see chapter 2.4 and, like it says there, chapter 16
[09:05:25] <MrSunshine__> ye but i gues si have to know the gcode, if the gcode starts at the bottom of the material or the top of the material ? :)
[09:09:30] <MrSunshine__> is there a page with user written hal "addons" . or userinteraface addons that can be downloaded and used insted of trying to learn all that oneself? :)
[09:19:28] <archivist_emc> machines are dangerous, you learn, dont leave to chance
[09:20:51] <archivist_emc> each part may have a different concept of top
[09:22:18] <MrSunshine__> ye, and that sucks realy :)
[09:22:38] <MrSunshine__> but then if its at the bottom i could just touch off the top, and add the material thickness to the offset
[09:26:01] <archivist_emc> cut air tp see what will happen
[10:29:32] <EbiDK> EbiDK is now known as EbiDK|AWAY
[11:04:22] <EbiDK_> EbiDK_ is now known as EbiDK|AWAY
[11:25:02] <MarkusBec_away> MarkusBec_away is now known as MarkusBec
[11:34:17] <MrSunshine> can i use the touchoff more then one time in one program ?
[11:34:38] <MrSunshine> i was thinking if i have a drilling cycle with an ordenary drill, then i switch to an end mill and dont know the height of it
[11:34:51] <MrSunshine> can i then jog it down to the material, touch off then continue? :)
[13:16:28] <tom3p> re: stepconf wont move any axis, yet emc runs fine: any ideas why?
[13:21:57] <MarkusBec> MarkusBec is now known as MarkusBec_away
[13:23:40] <MarkusBec_away> MarkusBec_away is now known as MarkusBec
[13:24:04] <jthornton> do you need an enable or something for your driver board?
[13:34:30] <MattyMatt> 20 years ago I had a dongle which had LED on all the pio lines. that'd be handy now
[13:35:58] <MattyMatt> if wired for the IBM pio, instead of the old straght-through standard
[13:37:50] <MattyMatt> that was bloody annoying of IBM at the time. everybody elses (Radio shack, apple, Atari ST) could use IDC ribbon cables
[13:43:42] <MattyMatt> my driver board has a fair number of LED on it :) not 12 in a row tho for cable diagnostics
[15:03:58] <tomp> re: stepconf wont move any axis, yet emc runs fine: ran step conf theu emc2-dev (recent git) and emc2-trunk ( last cvs ). found that emc2-trunk WILL move the Y axis (only) and teh saved cfg is fine in all 3 axis with emc of same directory.
[15:04:15] <tomp> stepconf is broken.
[15:04:55] <archivist_emc> stepconf does not read your old config
[15:05:07] <tomp> it was necc to cfg all 3 axis, then go BACK to Y before it would respond.
[15:05:18] <tomp> not reading olkd cfg this is brand new
[15:05:51] <tomp> i had to type it all in again, ive typed it all in maybe 40 times over last 3 days
[15:07:28] <tomp> (and it does read in the old cfg if you choose to (im rewrting it all with new file names each time) , it just fscks up a few data , most are there )
[15:08:09] <tomp> tomp is now known as tom3p
[15:41:22] <helich> hello. i tried to install 8.04 by means of wubi, but emc crashes always. i do not need it to run a machine, installation is needed only for corrections and checking code. is it possible to stop crashing? the problems seems to be with realtime.
[15:59:45] <tom3p> helich: I've never used the wubi installer, ask again here, or maybe post to the emc mail list and ask there, maybe someone knows
[16:05:32] <tom3p> re: stepconf wont move any axis, yet emc runs fine: just used git to make a new install, made it run in place. stepconf will not move anyaxis except Y, and the rip emc runs fine in all 3 axis. stepconf is broken. EMC2/AXIS version 2.4.0~pre
[16:11:11] <tom3p> re: stepconf wont move any axis, yet emc runs fine: maybe its steptest thats broken, i found no man page for stepconf, but did find the lower level tool that stepconf uses. maybe the call to it is broken, or its broken itself. see man 9 steptest
[16:57:16] <Guest756> Guest756 is now known as skunkworks
[18:46:43] <SWPLinux> hmmm. that was weird
[18:46:54] <SWPLinux> I got a notice that I was banned from this channel
[18:47:06] <SWPLinux> but apparently I'm not, since it worked on the second try
[18:47:12] <eric_unterhausen> that is weird
[18:48:02] <eric_unterhausen> I thought the worst we could do is a half-hearted shunning
[18:48:18] <SWPLinux> no, banning is available as well
[18:49:06] <eric_unterhausen> I imagine that if you have a dedicated troll, it becomes necessary
[18:49:29] <SWPLinux> or some IRC logging "services", like the IRSeekbot
[18:50:03] <eric_unterhausen> I thought they were allowed
[18:50:10] <SWPLinux> not in here
[18:50:27] <SWPLinux> they basically log everything they can, and then charge people to access it (AFAIK)
[18:50:32] <SWPLinux> so we don't like them
[19:01:40] <eric_unterhausen> how do you find out where the live cd packages install things? Specifically the emc environment script
[19:02:00] <SWPLinux> there's a dpkg incantation to list all the installed files
[19:02:09] <SWPLinux> something like dpkg -L the.package.name
[19:02:31] <SWPLinux> or in synaptic, it's in the properties page, under installed files
[19:03:51] <eric_unterhausen> thanks
[19:04:45] <eric_unterhausen> if there isn't a page with instructions on how to take a live-cd installed system to a development system, I should write it because it drives me nuts every time I do it
[19:06:34] <EbiDK> EbiDK is now known as EbiDK|AWAY
[19:23:37] <cradek> eric_unterhausen: there is, it's on the wiki
[19:23:56] <eric_unterhausen> my search skills suck as usual then
[19:24:17] <cradek> http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?Installing_EMC2
[19:25:06] <cradek> something about wikis makes it hard to find anything.
[19:25:21] <cradek> unless you already know what's good and what's outdated, anyway
[19:28:22] <eric_unterhausen> can I just use pncconf with a live-cd installed emc?
[19:28:40] <cradek> I don't think it's in the 2.3 release family
[19:28:59] <eric_unterhausen> it's not, but I got the source from git
[19:29:33] <EbiDK> EbiDK is now known as EbiDK|AWAY
[19:31:17] <skunkworks> http://cnczone.com/forums/showthread.php?t=93949
[19:32:19] <eric_unterhausen> that seems to be a common problem
[19:33:33] <eric_unterhausen> it's because of velocity/accel limits, correct?
[19:39:11] <cradek> it's just a different type of motion. our planner is just not suited for raster "plotting" as-is
[19:40:19] <cradek> bbl
[20:16:53] <numen> hi
[20:17:43] <skunkworks> numen: hi
[20:18:34] <eric_unterhausen> I gotta stop trying to set things up at 3:00 in the morning
[20:18:48] <numen> does anyone know a good selfmade stepper controller with microsteps and about 6A/60-80V?
[20:22:36] <skunkworks> numen: only one I know of is
http://cnczone.com/forums/showthread.php?t=81125&highlight=cpld+stepper
[20:24:05] <numen> skunkworks but there is no vhdl file avaible
[20:24:41] <skunkworks> really? I thought it had everything you needed.
[20:25:55] <numen> where to find?
[20:29:48] <numen> and i think, this is an tut?
[21:09:08] <awallin> hm, I'm wondering how much power the spindle motor on my lathe will really need...
[21:09:30] <awallin> I looked at the 1.75kW servo today, but it only has resolver output I think
[21:09:35] <awallin> no encoder
[21:09:37] <awallin> no hall signals
[21:13:00] <andypugh> Resolvers still work
[21:14:28] <awallin> I'll have to find a drive that accepts resolver signals. And I would need to mount an encoder myself
[21:18:17] <tom3p> i think jon elson has a resolver->digital component, iirc it looks like a digital encoder , which might open the drive candidates up for you
[21:18:41] <awallin> is the resolver purely a passive device?
[21:18:51] <awallin> now I didn't hook up any power to it
[21:18:59] <awallin> just watched signals on the scope
[21:19:08] <andypugh> No, it's a rotary transformer. There is a wikipedia page that explains it
[21:21:19] <awallin> so I need to power it with a sine-wave ?
[21:24:26] <alex_joni> yes, you need to power a resolver with a sine-wave
[21:24:37] <alex_joni> but the frequency/amplitude depends on the model
[21:25:12] <alex_joni> the pure passive device is the tach
[21:26:58] <awallin> I'm selling these NEMA23 220Ncm steppers
http://picasaweb.google.fi/anders.e.e.wallin/NEMA23SteppersForSale#5406985379865837298
[21:33:46] <alex_joni> pretty big
[21:34:12] <awallin> ?
[21:35:41] <alex_joni> the steppers ;)
[21:37:32] <alex_joni> although 0.2Nm doesn't sound like much
[21:38:58] <awallin> nema23 is not big
[21:40:50] <andypugh> 220Ncm is 2Nm
[21:47:19] <alex_joni> err.. right
[21:47:28] <alex_joni> still 0.2kg/m
[21:47:36] <numen> does anyone know a good selfmade stepper controller with microsteps and about 6A/60-80V?
[21:48:09] <Jymmm> you mean driver
[21:48:11] <Jymmm> ?
[21:48:29] <Jymmm> geckodrives.com
[21:48:41] <awallin> hm, Jon Elson has a resolver converter, which converts the resolver output into digital encoder signals. But that doesn't seem to help with the drive? It still needs hall-signals
[21:48:44] <numen> Jymmm self build, not finished
[21:48:44] <alex_joni> Jymmm: would be my choice too, but it's not selfmade
[21:49:03] <alex_joni> awallin: there are drives that take resolvers as an input
[21:49:08] <numen> i need 7pcs
[21:49:09] <Jymmm> numen: At that power levels, I wouldn't go elf-made
[21:49:16] <Jymmm> self-made
[21:49:18] <numen> and for buy them, they are too cheap
[21:49:23] <numen> expensive3
[21:49:30] <alex_joni> awallin: but you still need to have them matched to your motor..
[21:49:40] <numen> Jymmm why not?
[21:49:55] <Jymmm> it be cheaper to buy instead of build
[21:50:01] <awallin> the pico-systems converter only goes up to 1000rpm
[21:50:19] <numen> Jymmm not, if you need 7pcs
[21:50:20] <awallin> where would I find a reasonably priced resolver-drive then? :)
[21:50:32] <numen> and i want to learn s.th
[21:50:50] <alex_joni> this is certainly not a first time project
[21:51:02] <Jymmm> numen: at 6a I dont think so
[21:51:05] <numen> alex_joni its not my first project
[21:51:18] <numen> i did a lot of electronics stuff before
[21:51:20] <Jymmm> Good luck with that
[21:51:28] <numen> but where to find?
[21:51:57] <motioncontrol> good evening.i want create a link at shared library :libmean.so.1.0.1 and i have start the command :gcc main.c -o dynamically_linked -L. -lmean
[21:51:57] <motioncontrol> , but have the error lmean not found because
[21:52:37] <alex_joni> numen: most probable project is to take a microstepping control chip A<mumble> and use some high power transisters as output stage
[21:52:54] <alex_joni> not sure you'll find a ready made design for 6A
[21:52:59] <alex_joni> most I've seen are 2-3A
[21:53:24] <numen> alex_joni the power side is not the problem
[21:53:36] <numen> the biggest problem for me is the logic side
[21:54:56] <alex_joni> http://www.cnczone.com/forums/showthread.php?p=508107
[21:55:20] <alex_joni> http://www.allegromicro.com/en/Products/Part_Numbers/3986/
[21:56:20] <alex_joni> otoh:
http://cgi.ebay.ca/MM220-6A-Bipolar-Microstepping-Stepper-Motor-Driver_W0QQitemZ330378632812
[21:56:38] <numen> alex_joni max 50V
[21:58:03] <andypugh> numen: TA8435H with power drivers?
[21:59:24] <numen> andypugh i think, this part has not outputs for mosfets
[21:59:34] <alex_joni> andypugh: the problem is current limiting
[21:59:46] <andypugh> Ah, OK
[21:59:48] <alex_joni> getting that right is a bit tricky
[22:02:34] <numen> alex_joni does this allegro part suppy voltage for the fets more than 50V?
[22:03:14] <numen> i dont think o
[22:03:15] <numen> so
[22:04:35] <alex_joni> numen: dunno.. never used it
[22:05:08] <alex_joni> I agree with Jymmm that it's more economic to buy something proven
[22:06:07] <numen> mhm
[22:06:39] <alex_joni> numen: I'm sure it's not the answer you're after
[22:07:00] <alex_joni> but we've seen countless examples of people planning to do their own thing in #emc over the years
[22:07:12] <alex_joni> and I can't say I remember one example where it worked out ok
[22:08:29] <numen> so i will be the first one ^^
[22:08:36] <celeron55_> it depends if you want to mess around with electronics or mill something
[22:08:42] <celeron55_> easy choice
[22:08:58] <numen> celeron55_ both ^^
[22:09:42] <andypugh> I started out wanting to mill something. The machine and electronics has become a project of its own.
[22:10:12] <numen> http://www.sorotec.de/shop/product_info.php/info/p966_schrittmotor-4-2a-bipolar---3nm.html
[22:10:32] <numen> i think, i should use this steppers with more than 50V for a good speed
[22:10:51] <andypugh> You can get them cheaper than that.
[22:11:19] <numen> where?
[22:11:29] <andypugh> http://www.motioncontrolproducts.co.uk/product_info.php?cPath=1004&products_id=6
[22:14:07] <awallin> how do you all feel about using these cheap switched-mode PSUs for servos? Looks like I can get a PSU from the east for less than the toroid transformer costs over here
[22:15:35] <numen> andypugh thx
[22:15:35] <archivist_emc> awallin, I use a Llambda switchmode, not a cheap one if you buy new but look for second hand
[22:15:57] <numen> but i allready have 8 of these
[22:16:13] <celeron55_> i guess you're relying on one cheap switched-mode psu at the moment for running your irc client, too :-)
[22:21:32] <archivist_emc> yup 22:25:46 up 29 days
[22:21:51] <awallin> still wondering if 7-800 W would be enough for the lathe spindle.... don't like the resolvers on that AC servo I have at all
[22:24:26] <andypugh> My lathe spindle is a 750W AC motor. Seems fine. Can't say I wouldn't like a bit more power though (mainly on the Z axis thoigh)
[22:24:54] <awallin> how big is your lathe?
[22:25:03] <andypugh> 9x40?
[22:25:12] <awallin> with a servo torque at low speeds should be much better than with an induction motor
[22:25:12] <andypugh> Or is it 7x40?
[22:25:29] <andypugh> Yes, I would expect that to be the case.
[22:25:43] <awallin> shall we start with the imperial vs. metric again ? :)
[22:26:40] <andypugh> It's one of these.
[22:26:41] <andypugh> http://www.amadeal.co.uk/acatalog/CX23A-750_Multi-Purpose_Lathe_Milling_Machine.html
[22:27:10] <andypugh> SO 230x750
[22:28:56] <andypugh> Frankly if I was to rewind the clock, I wouldn't start with one of them as a base for a conversion again.
[22:28:57] <awallin> motioncontrolproducts.co.uk has an 800W servo for around 200. know of any other european webshops with beefy AC servos?
[22:30:23] <andypugh> http://www.slidesandballscrews.com/servo-motors-c-70.html?osCsid=0f9ad975b8cb8c0ff64b7dfde1f9a0aa
[22:31:53] <awallin> 2.4kW...
[22:32:15] <awallin> well it seems someone bought the NEMA23 steppers, so I am rich!
[22:45:28] <Jymmm> LawrenceG:
http://cgi.ebay.com/Thunderbolt-PRECISION-GPS-10Mhz-1PPS-Standard-Easy-Kit_W0QQitemZ180419218430QQcmdZViewItemQQptZLH_DefaultDomain_0?hash=item2a01d2cbfe
[22:50:11] <archivist_emc> I have an xtal that's nearly that stable Jymmm
[22:51:54] <Jymmm> archivist_emc: LawrenceG built a 10MHz refernce, I'd like to make one using a AXCO + gps+ arduino
[22:54:38] <archivist_emc> one of these
http://leapsecond.com/museum/sul25-1/
[22:57:38] <archivist_emc> my aim is to bring the xtal to world time with gps one day
[22:59:07] <Jymmm> archivist_emc: No, one of these...
http://www.rt66.com/~shera/QST_gPS.pdf
[23:00:09] <archivist_emc> the sort term stability should be better for me to use my xtal
[23:01:04] <andypugh> awallin:
http://cgi.ebay.co.uk/servo-motor-sanyo-denki_W0QQitemZ330379116915
[23:01:09] <archivist_emc> something like that bringiing it to world tame would make it better long term
[23:26:43] <MarkusBec> MarkusBec is now known as MarkusBec_away
[23:28:31] <BigJohnT> cradek: on the control transformer of the Hardinge there is a blue box marked F1... does your machine have a similar one? I let the smoke out of mine...
[23:29:19] <BigJohnT> I don't see a call out on the prints...
[23:32:59] <alex_joni> night all
[23:33:26] <motioncontrol> good night alex
[23:34:53] <BigJohnT> time to go
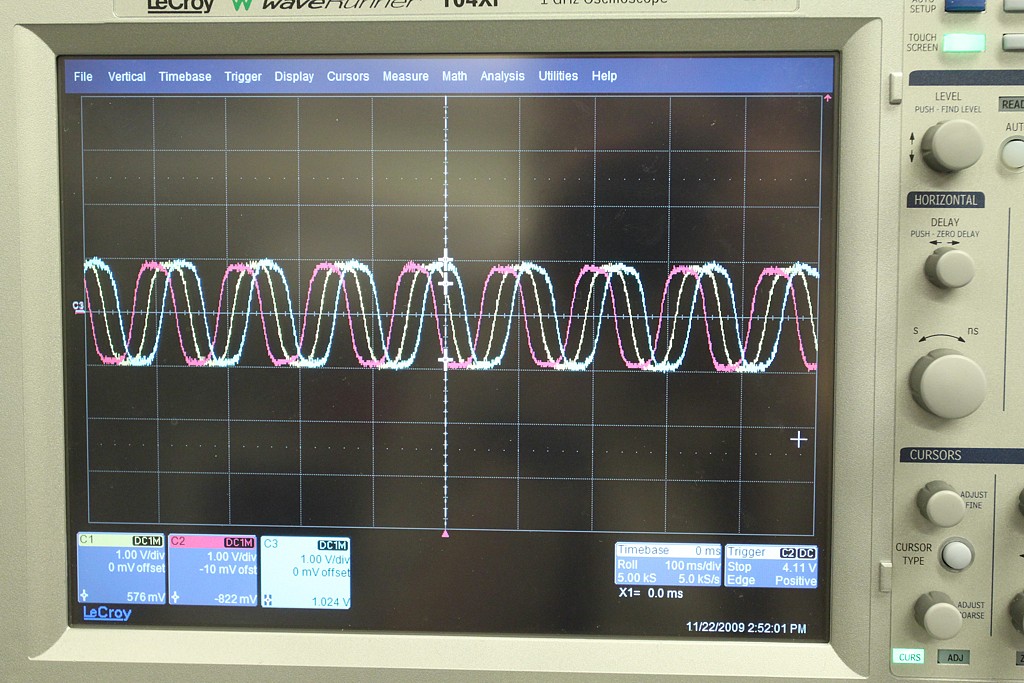
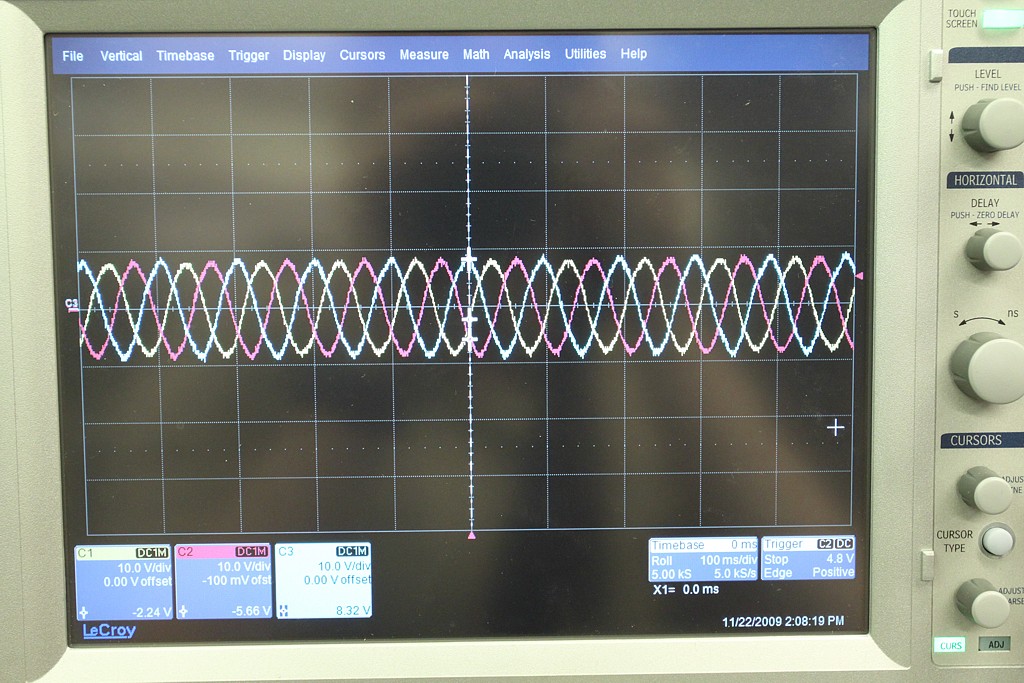
[23:43:14] <awallin> are these resolver signals?
http://www.anderswallin.net/wp-content/uploads/2009/11/resolver.jpg I got them without applying any power to the encoder/resolver
[23:43:41] <awallin> turning the motor with an electric drill
[23:43:55] <archivist_emc> lecroy scope!!!
[23:43:56] <eric_unterhausen> brushless motor
[23:44:28] <eric_unterhausen> ?
[23:44:31] <awallin> archivist_emc: ja, I think it's around 14keur.... 1GHz BW :)
[23:44:57] <awallin> eric_unterhausen: yes, the U, V, W look just fine:
http://www.anderswallin.net/wp-content/uploads/2009/11/U_V_W.jpg
[23:45:24] <eric_unterhausen> you may be getting emf from the motor into the resolver windings
[23:46:14] <awallin> andypugh: that Sanyo on ebay looks really big. And no info on ecoder/hall signals
[23:46:31] <andypugh> No, I tried to google the model number, but no luck.
[23:46:39] <awallin> eric_unterhausen: oh, that might have been only crosstalk then?
[23:46:45] <andypugh> I don't think it is _that_ huge, going by the relative size of the connectors.
[23:47:05] <awallin> 150x150mm mounting plate?
[23:47:07] <eric_unterhausen> resolver is just a transformer
[23:47:40] <eric_unterhausen> I have a brushless motor the same size as the sanyo denki, it isn't all that big
[23:48:11] <eric_unterhausen> they use something like that on the smaller Haas machines
[23:48:19] <andypugh> And the plan was to use it as the spindle motor, I thought.
[23:48:26] <awallin> I'd want standard Hall signals and a 1000ppr or similar encoder with index
[23:48:29] <eric_unterhausen> I've thought about that
[23:49:19] <eric_unterhausen> most of the sanyo denki are standard, but of course some aren't
[23:50:37] <andypugh> There ware some lovely servos on eBay a few weeks back. A pair of 190Nm ones. With the drive cabinet for about £50
[23:51:23] <awallin> how come the torque drops off so rapidly after the rated max rpm? how does that work?
{kind=link}
{kind=link}