Back
[01:40:17] <skunkworks> so - when I look at the voltage across the sense resistor.. I start to see the square wave that matches the incoming square wave - but as it starts to trip the current limit it turns into a mess. high frequency and messy. < technical term.
[01:41:09] <skunkworks> (this is measuring using add>invert) on the scope.
[01:49:36] <jmkasunich> what does switching look like? (you'll need to be fast - 100nS/div maybe)
[01:49:42] <eric_unterhausen> where is your ground reference?
[01:51:27] <skunkworks> bear with me.. Something is terribly wrong. :)
[01:53:30] <steves_logging> steves_logging is now known as steve_stallings
[01:54:00] <skunkworks> When I measure the logic right after the inverter - I see the square wave - but as it goes to current limit - the square wave turns to noise. (when the square wave is on - it is pretty solid noise)
[01:54:52] <jmkasunich> verbal descriptions aren't going to work, can you snap a photo of the scope traces?
[01:55:17] <skunkworks> I will - btw - this scope has a max sweep of .05us
[01:55:22] <skunkworks> yeck
[01:55:31] <jmkasunich> thats 50nS/div
[01:56:11] <skunkworks> right - just letting you know the limit of this thing.
[01:56:31] <steve_stallings> scopes and high power circuits can play lots of tricks on you, don't take anything at face value
[01:57:58] <steve_stallings> location and orientation of the "ground" clip can have major effects
[01:59:29] <skunkworks> I am at the edge of my confort zone as far as knowledge.. :) Said a different way - I have not had to deal with this kind of problems.
[02:00:22] <skunkworks> (but that could be the fun part..
[02:07:13] <skunkworks> http://imagebin.ca/view/Iubr5BG.html
[02:07:28] <jmkasunich> what is the timebase?
[02:07:48] <skunkworks> this would be the pwm after the inverter before the driver.
[02:07:55] <jmkasunich> what is the timebase?
[02:08:00] <skunkworks> 50us
[02:08:17] <jmkasunich> turn the knob faster
[02:08:19] <jmkasunich> and keep turning
[02:08:30] <skunkworks> heh - ok
[02:08:32] <jmkasunich> you want to be looking at a single transition
[02:09:05] <jmkasunich> this is gonna be hard without a storage scope, you'll always be looking at many many overlaid traces
[02:09:05] <steve_stallings> and what is the amplitude, in volts, and what is the value of the sense resistor?
[02:09:26] <jmkasunich> I think the trace he posted is just a logic signal, not across the resistor
[02:09:37] <jmkasunich> skunkworks: how many traces does that scope have?
[02:09:55] <eric_unterhausen> can you repost the link, my router decided to overheat just then
[02:10:05] <jmkasunich> http://imagebin.ca/view/Iubr5BG.html
[02:10:13] <eric_unterhausen> thanks
[02:12:15] <eric_unterhausen> you can fairly see about 20 spikes for each of the upward pulses
[02:13:05] <jmkasunich> probably when it begins to switch (on or off, can't tell), the noise gets into the logic and flips it the other way
[02:13:28] <steve_stallings> OK, that makes sense, the voltage across the resistor should be a larger DC offset with the smaller ripple imposed on it. The motor inductance will keep the current relatively constant.
[02:15:21] <steve_stallings> 4000 series logic running on 12 volts should have fairly good noise imunity
[02:15:36] <skunkworks> this one sucks .5us
http://imagebin.ca/view/kpE1ct.html
[02:15:37] <eric_unterhausen> it looks like it's doing it on purpose
[02:16:06] <skunkworks> jmkasunich: all I have is 2
[02:16:10] <skunkworks> channesl
[02:16:14] <SWPadnos> yeow, that does look like shit
[02:16:15] <jmkasunich> use them both
[02:16:37] <jmkasunich> or are you already using two, to subtract?
[02:16:39] <SWPadnos> make sure you only connect ground clips to the ground!
[02:16:52] <skunkworks> heh
[02:16:56] <eric_unterhausen> but the problem is where is ground
[02:16:58] <skunkworks> yes
[02:17:07] <jmkasunich> control circuit ground
[02:17:08] <SWPadnos> the sense resistor goes to ground on one side, I believe
[02:17:10] <skunkworks> I am using both to subtrack
[02:17:16] <skunkworks> subtract
[02:17:24] <jmkasunich> ok, lets go step by ste
[02:17:25] <jmkasunich> p
[02:17:52] <jmkasunich> 1) put both probe ground clips on the control ground end of the sense resistor
[02:18:19] <jmkasunich> 2) put the signal end of one channel on the output of the "PWM in" opto
[02:18:53] <jmkasunich> use that channel to trigger the scope, turn the vert pos control so the trace is out of the way but visible (set gain so it's only about 1 div high)
[02:19:15] <jmkasunich> 3) put the signal end of the other channel on the control ground end of the sense resistor (same place as the ground clip)
[02:19:26] <jmkasunich> and see how much crap that channel picks up
[02:21:52] <skunkworks> ok - give me a bit
[02:21:59] <eric_unterhausen> one point to consider is how good your probes might be, but I'm not sure how to evaluate that
[02:22:55] <jmkasunich> eric_unterhausen: scope cal output maybe?
[02:23:08] <eric_unterhausen> well, that tells you at 1khz
[02:23:17] <steve_stallings> the setup JMK just described will help determine how much EMI the probes are picking up
[02:23:34] <jmkasunich> usually the scope cal output rise time is pretty well matched to the scope bandwidth - you can look at single edge using a very fast sweep rate
[02:24:00] <jmkasunich> just cause the rep rate is 1KHz doesn't mean you can't set the sweep to 50nS/div
[02:24:18] <jmkasunich> although that will give a dim trace on an analog scope
[02:24:21] <jmkasunich> * jmkasunich is spoiled
[02:24:37] <eric_unterhausen> me too, I have a $25k Tek scope
[02:24:47] <jmkasunich> I'm not that spoiled ;-)
[02:24:50] <steve_stallings> using invert and add can be dicey sometimes because the effective CMRR is not that good
[02:25:11] <jmkasunich> I have a Tek 2440 here, and use TDS540 or 740 at work
[02:25:27] <eric_unterhausen> that actually sounds like what I have
[02:25:43] <eric_unterhausen> the $25k scope is pretty much reserved for ultrasonics
[02:34:37] <eric_unterhausen> my best scope at home is one of these
http://www.newshoggers.com/blog/2009/01/burning-down-the-house.html
[02:36:25] <eric_unterhausen> sorry, burnt by firefox
[02:36:39] <eric_unterhausen> http://cgi.ebay.com/ws/eBayISAPI.dll?ViewItem&ssPageName=STRK:MEWAX:IT&item=220337160508
[02:38:16] <jmkasunich> thats an analog scope, right?
[02:39:04] <eric_unterhausen> how do you tell?
[02:39:34] <jmkasunich> well, it doesn't say digital ;-)
[02:40:07] <jmkasunich> my 2440 is roughly the same vintage, but it is digital - can capture single-shot events and keep them on screen
[02:40:24] <jmkasunich> very limited by todays standards, but exceptionally fast for its time - 500Ms/s
[02:40:29] <eric_unterhausen> says something about storage
[02:41:03] <eric_unterhausen> I'm a mechanical engineer, 200MHz is past my bedtime anyway
[02:41:10] <jmkasunich> ah ;-)
[02:43:29] <eric_unterhausen> problem with analog scopes is that I don't have the patience to sync them up any more
[02:43:55] <skunkworks> ok - this is with no siganl - out put of the opto. .2v/divX10
http://imagebin.ca/view/kpE1ct.html (I have 2 more coming)
[02:44:17] <skunkworks> 10us
[02:44:30] <eric_unterhausen> skunkworks: what opto are you using?
[02:44:41] <jmkasunich> what do you mean "no signal output of the opto? ?
[02:45:04] <eric_unterhausen> no input to the opto?
[02:45:36] <jmkasunich> if it is doing _anything_ except sitting quietly when there is no PWM input to the opto, you gots really big problems dude
[02:45:53] <SWPadnos> that was the same image as before
[02:46:13] <eric_unterhausen> they don't really like following a square wave unless there is a solid drive signal in my experience
[02:46:27] <skunkworks> ok - this is with no siganl - out put of the opto. .2v/divX10
http://imagebin.ca/view/kpE1ct.html (I have 2 more coming)
[02:46:32] <skunkworks> crap
[02:46:42] <skunkworks> this is with just a little pwm
http://imagebin.ca/view/VwzKGb.html
[02:46:55] <jmkasunich> where is the one with no signal?
[02:47:08] <SWPadnos> http://imagebin.ca/view/y9ynYfi.html maybe
[02:47:21] <jmkasunich> lol
[02:47:30] <jmkasunich> that was a waste of upload time
[02:47:35] <SWPadnos> heh
[02:47:40] <SWPadnos> numerically ,it fits
[02:47:49] <eric_unterhausen> I like pict1381.jpg, there seems to be a fire illuminating the scope
[02:48:23] <SWPadnos> the extra blip is intriguing
[02:48:36] <jmkasunich> the one about 1/10 div after the falling edge?
[02:48:41] <SWPadnos> yes
[02:48:45] <jmkasunich> yeah
[02:48:47] <SWPadnos> on both edges, looks like
[02:48:49] <eric_unterhausen> I think the lazy rise time is interestinger
[02:49:09] <SWPadnos> (both captured falling edges)
[02:49:09] <SWPadnos> opto
[02:49:21] <eric_unterhausen> but you'll note that the trace goes backwards in time
[02:49:23] <jmkasunich> open collector opto probably, soft pullup
[02:49:27] <eric_unterhausen> just before the drop
[02:49:36] <SWPadnos> heh
[02:49:37] <jmkasunich> eric_unterhausen: ?
[02:49:44] <SWPadnos> somebody needs to adjust for magnetic north
[02:50:17] <jmkasunich> somebody needs to start triggering on the falling edge - the rising edge is to slow to be usefull
[02:50:19] <SWPadnos> it's probably two traces, the exposure time is unlikely to be exactly one scan
[02:50:26] <jmkasunich> then turn the timebase up by a factor of about 10
[02:50:51] <skunkworks> http://imagebin.ca/view/iJuSAkig.html
[02:50:51] <eric_unterhausen> jmkasunich: that's probably what it is
[02:50:57] <skunkworks> heh
[02:51:11] <SWPadnos> ok, now that looks like shit
[02:51:11] <jmkasunich> skunkworks: faster faster
[02:51:15] <eric_unterhausen> that's the output of the opto?
[02:51:21] <skunkworks> thats what she said..
[02:51:21] <SWPadnos> but it's regularly spaced shit, which is nice
[02:51:43] <eric_unterhausen> part of that is lack of synk
[02:51:46] <eric_unterhausen> c
[02:51:50] <jmkasunich> yeah
[02:51:59] <jmkasunich> can't trigger on the rising edge and get anything usefull
[02:52:15] <jmkasunich> I wonder if that scope has any internal delay line, so you can trigger on the falling edge and actually see the edge
[02:52:20] <eric_unterhausen> but there is some badness there at the bottom
[02:52:28] <SWPadnos> action items: skunkworks, trigger on falling edge and speed up the horizontal scan if possible
[02:52:30] <jmkasunich> eric_unterhausen: understatement of the week
[02:52:52] <eric_unterhausen> do you know what opto he's using?
[02:53:01] <jmkasunich> no
[02:53:40] <jmkasunich> skunkworks: for every pic: what we're looking at, what the vertical scale is, what the horizontal scale is
[02:54:35] <eric_unterhausen> this is better than the football game, that's for sure
[02:55:54] <jmkasunich> skunkworks: are you running EMC?
[02:56:13] <SWPadnos> ok, time to adjust the focus on my TV. bbl
[02:56:32] <jmkasunich> I have things I need to do too
[02:56:53] <jmkasunich> skunkworks: you (and everybody else watching) are going to grow old at this rate
[02:57:18] <jmkasunich> you need to go to a simple open-loop HAL only config, where you simply set the PWM duty cycle and let the motor spin
[02:57:25] <skunkworks> sorry.. I am not that fast.
[02:57:46] <jmkasunich> that way you have a consistent operating condition, and can concentrate on observing and understanding that condition
[02:58:04] <jmkasunich> I need to go away anyway, maybe we can pick this up again tomorrow
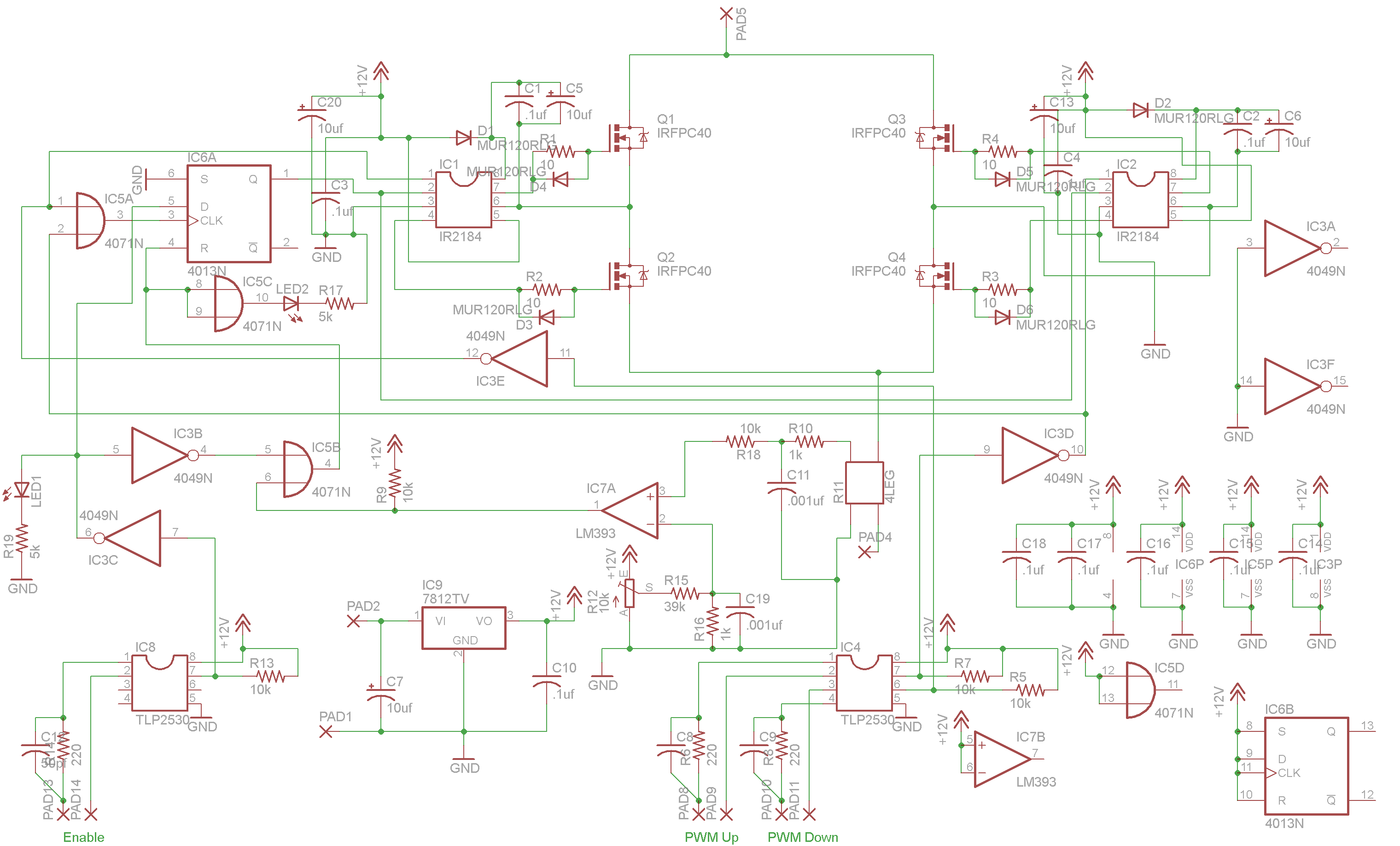
[02:58:11] <steve_stallings> his latest schematic shows a TLP2530 with a 10K ohm pull-up to +12 VDC on the output feeding a CD4049
[02:58:49] <skunkworks> 2v per div 1us
http://imagebin.ca/view/DHfhtZ.html
[02:59:06] <jmkasunich> so it is oscillating at 500KHz
[02:59:24] <jmkasunich> what are we looking at? still the opto output?
[02:59:27] <skunkworks> yes
[02:59:48] <jmkasunich> what was the timebase in this one?
http://imagebin.ca/view/iJuSAkig.html
[03:00:04] <eric_unterhausen> I think it needs more decoupling on the opto
[03:00:14] <skunkworks> 10us
[03:00:19] <jmkasunich> you have no idea how painfull it is to not be able to just grab the scope knob and turn
[03:00:28] <skunkworks> I know :)
[03:00:32] <steve_stallings> impednance in the high state is 10K ohms, possible suseptable to feedback from high voltage swings on the output
[03:00:48] <jmkasunich> yeah, but he's getting oscillation while it is low
[03:00:58] <skunkworks> yes
[03:01:21] <steve_stallings> boinkkkkkk! look at the trace....
[03:01:21] <eric_unterhausen> yeah, but he's pulling it low with Vcc
[03:01:28] <jmkasunich> skunkworks: are you running at constant duty cycle, or is this with a PID loop, and motion commands, and all that?
[03:01:31] <skunkworks> jeeze - could I just be getting noise on the input wiring..
[03:01:44] <jmkasunich> skunkworks: you can speculate all day
[03:01:47] <skunkworks> heh
[03:02:09] <skunkworks> Yes - everything you said.. I am getting the traces by twisting the shaft.
[03:02:21] <jmkasunich> I really think you need to take many large steps backwards
[03:02:29] <jmkasunich> constant duty cycle input
[03:02:40] <skunkworks> I can make a hal file and play
[03:02:46] <jmkasunich> either just pwmgen (or 5i20, whatever), or even a benchtop signal generator, whatever you got
[03:02:48] <steve_stallings> at 2 volts per division, the noise is over 4 volts!!
[03:03:15] <skunkworks> cool huh
[03:03:18] <jmkasunich> trigger the scope using the opto LED drive signal on one channel, then use the other channel to probe around
[03:03:42] <jmkasunich> turn off the motor power, and just make sure you understand what the logic and gate drive circuits are doing
[03:03:43] <steve_stallings> perhaps we need to look at the +12 volts to see if there is noise there, I don't see any high frequency bypass caps
[03:03:59] <jmkasunich> steve_stallings: link to schematic?
[03:04:00] <skunkworks> lots of .1uf caps
[03:04:34] <steve_stallings> OK, the . doesn't come thru, I was seeing 1 uf
[03:05:34] <skunkworks> http://www.electronicsam.com/images/KandT/servostart/schemmore.png
[03:05:48] <skunkworks> http://www.electronicsam.com/images/KandT/servostart/schem/newcurrentlimit/
[03:05:58] <skunkworks> acutal eage files also
[03:06:11] <jmkasunich> ok, which pin are we looking at?
[03:06:32] <jmkasunich> IC4 pin ?
[03:06:39] <skunkworks> pin 6 of ic4
[03:06:53] <jmkasunich> and where is the ground clip attached?
[03:07:30] <skunkworks> bottom left of r11
[03:07:46] <jmkasunich> is that the sense resistor?
[03:07:48] <skunkworks> yes
[03:08:37] <skunkworks> r18 is just a jumper.
[03:08:39] <jmkasunich> are you actually using TLP2530, or is that just some Eagle symbol that is close?
[03:08:57] <skunkworks> that is actual part number
[03:10:04] <jmkasunich> pin 5 of IC4 is supposed to be grounded
[03:10:39] <skunkworks> it is
[03:11:20] <jmkasunich> looking at neatneat.png, it looks like it goes to C14, then IC8-pin 14, then IC8-pin 8, then to a flood
[03:12:11] <skunkworks> yes
[03:12:30] <jmkasunich> pin 8 of the opto looks like it passes close to C14, does it actually connect?
[03:12:52] <skunkworks> yes
[03:13:46] <jmkasunich> eww, 7% min CTR on those optos
[03:13:53] <jmkasunich> you gotta hit them with a sledge hammer
[03:14:07] <skunkworks> hence the 220ohm resistors.
[03:14:17] <steve_stallings> and the speed up cap
[03:14:25] <skunkworks> yes
[03:14:37] <jmkasunich> also eww, 1.5uS max prop delay
[03:15:24] <jmkasunich> I gotta go away....
[03:15:28] <steve_stallings> but the 1.5 uS is insignificant to the PID feedback loop
[03:15:45] <jmkasunich> he's passing PWM thru it
[03:16:01] <jmkasunich> it is significant relative to the switching speed of the FETs
[03:16:33] <steve_stallings> any real opto is slow compared to the FETS
[03:16:48] <jmkasunich> anyway, IMNSHO, he isn't gonna get anywhere till he gets a consistent PWM input, and starts using two channels of the scope
[03:17:09] <steve_stallings> 1.5 uS is relative to the 20 kHz PWM?
[03:17:47] <skunkworks> yep - that is my next project.. jmkasunich: Thanks for the insite.. I will try to be better prepared next time :)O
[03:17:48] <steve_stallings> yes, to output of the opto must faithfully reproduce its input or nothing will work
[03:18:18] <jmkasunich> scopes have two channels for a reason - use 'em
[03:18:51] <jmkasunich> (you are not at all unique here - I've seen engineers with many years experience farting around with one channel when a second one would make things go much quicker
[03:19:05] <steve_stallings> also try looking at signals with no motor load to see if noise induced problems go away
[03:19:09] <jmkasunich> usually you want to get a consistent input, and a consistent trigger (probably from as far upstream as possible)
[03:19:21] <jmkasunich> then follow the signal as it moves deeper into the circuit
[03:19:34] <skunkworks> I had it im my head that I needed to add and invert if I was going to get anything useful. (which is both channels) ;)
[03:19:46] <jmkasunich> get that out of your head
[03:19:50] <skunkworks> heh
[03:19:58] <jmkasunich> you need to UNDERSTAND when you need to add/invert
[03:20:08] <jmkasunich> and you need to know how to tell whether it is making a difference
[03:20:22] <steve_stallings> add and invert is useful for differential signals like the voltage across the motor, but we have problems much sooner than that
[03:20:32] <jmkasunich> right
[03:20:56] <jmkasunich> crawl, then walk, then run, then worry about dancing (PID is dancing)
[03:21:36] <jmkasunich> crawling in this case is having robust triggering and the ability to explain every bobble of the opto output
[03:21:51] <jmkasunich> if you can't explain every bobble of the ugly signal, reduce power till it isn't so ugly
[03:22:13] <jmkasunich> either reduce load current (torque) or even reduce motor voltage - perhaps run with logic supply only
[03:22:24] <jmkasunich> then incrementally increase power
[03:22:29] <steve_stallings> there are sockets on this board? try lifting pins on IC3 and pulling signals to a safe "off" state, then see if the opto works with everything else quiet
[03:22:54] <jmkasunich> what is IC3?
[03:23:07] <steve_stallings> opto for PWM input
[03:23:17] <steve_stallings> oops buffer following opto
[03:23:18] <jmkasunich> huh?
[03:23:27] <jmkasunich> ok
[03:23:33] <jmkasunich> simpler - turn off motor power
[03:23:55] <jmkasunich> isn't the +12 independent of motor power?
[03:24:07] <jmkasunich> PAD2 vs. PAD5
[03:24:13] <steve_stallings> well, I suggested disconnecting the motor earlier, but that does not stop DVDT of FETS
[03:25:03] <jmkasunich> PAD2 is independent of PAD4
[03:25:04] <jmkasunich> 5
[03:25:21] <jmkasunich> he can completely remove all "power" and just run the logic and gate drive
[03:25:33] <steve_stallings> good place to start
[03:27:02] <jmkasunich> goodnight
[03:27:29] <steve_stallings> nite
[03:27:29] <skunkworks> night - and thanks again.
[03:33:54] <skunkworks> http://imagebin.ca/view/aFeOh14Q.html
[03:34:18] <skunkworks> top trace - output of opto - bottom trace - input to driver ic.
[03:34:25] <steve_stallings> now that is more like it!!!
[03:34:36] <skunkworks> (no motor supply on)
[03:35:05] <steve_stallings> I assume that it gets all the way to the FET drivers without added noise....
[03:36:28] <skunkworks> yes - looking at the lower fet - same square wave. (gate)
[03:37:32] <steve_stallings> OK, if you want to see if the ciruit does what it is intended to do, you can user another resistor or pot to fake a signal at the junction of R18 and R10
[03:38:52] <steve_stallings> you can also try using 12 volts in place of the motor supply so that dVdT swings are less severe
[03:40:00] <steve_stallings> running with no motor or with a resistor in place of the motor may be useful, but remember that a resistor will not create back EMF so current will drop almost instantly when drive is turned off
[03:40:33] <skunkworks> I can make the drive go into current limit by putting voltage across the sense resistor.. What I really don't know is if it only comes back on on the next rising edge of the pwm signal
[03:41:47] <skunkworks> I had thought about that.. I should have some nice power resistors around here.
[03:44:15] <steve_stallings> JMK's approach of working from input toward power output stage is useful, but apply loads and motor supply in stages until you can find where something reacts incorrectly
[03:45:16] <steve_stallings> at the risk of jumping to conclusions, I worry about 10K load resistors in the presence of high power switching
[03:45:50] <steve_stallings> I see another case at R9 the pull-up on pin 1 of the current comparator
[03:49:27] <steve_stallings> also look at pin 7 of the comparator, you have its inputs biased outside its common mode range and at equal voltage, an ideal setup for pin 7 to oscillate and possibly couple noise to the other half
[03:51:00] <steve_stallings> not likely a real problem since pin 7 has no pullup, but I have a fear of common mode violations on op amps and comparators
[03:51:08] <skunkworks> I had thought about running each input to vcc and ground
[03:51:19] <skunkworks> heh'
[03:52:38] <steve_stallings> common mode does not include the positive rail, but stops 1.5 volts short of it, strange things may happen when this is exceeded
[03:54:48] <steve_stallings> no damage to the comparator, but the outputs become undefined
[04:22:53] <steve_stallings> steve_stallings is now known as steves_logging
[05:54:23] <KimK> I'm having trouble getting my (modified) 5-command bash script to run. It's based on Anders Wallin's project (Wiki) "M5i20 Halvcp Test Panel" at
http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?M5i20_Halvcp_Test_Panel . Details posted at
http://www.pastebin.ca/1300721 I may be doing something wrong, Any advice appreciated. Thanks.
[05:54:23] <eric_unterhausen> I have a couple of 8" long ballscrews, can I find them? no
[05:54:54] <eric_unterhausen> KimK: probably nothing wrong, they keep changing the pin names on you
[05:59:17] <eric_unterhausen> KimK: are you getting errors?
[05:59:49] <KimK> eric_unterhausen: I think all the pin names are in iotest.xml and pyiotest.hal, I hope to find out soon how all that editing worked out. I just found another thing to check, back in a moment.
[06:04:17] <KimK> OK, I was in the wrong directory and forgot to set permission to execute the script. So now I'm getting closer, better error list, still no pyVCP stuff, still confused by "realtime" part. Here's the errors: * configs/KJKm5i22/5i22test/iotest.sh: line 13: /home/kkirwan/emc2/scripts/realtime: No such file or directory * RTAPI: ERROR: could not open shared memory (errno=2) * HAL: ERROR: rtapi init failed * Error: Multiple component
[06:04:17] <KimK> s with the same name. * configs/KJKm5i22/5i22test/iotest.sh: line 20: ./pyiotest.hal: No such file or directory *
[06:04:34] <KimK> Oops sorry.
[06:04:50] <KimK> I'll fix the line 20 error
[06:05:13] <KimK> But what is that "realtime start" business?
[06:05:31] <eric_unterhausen> you need to get it to load the realtime modules
[06:05:53] <KimK> OK. I thought that was on all the time.
[06:06:11] <eric_unterhausen> no, the modules get loaded and unloaded
[06:06:20] <eric_unterhausen> the kernel is built to accept them
[06:07:04] <KimK> OK. Let me look around again for the object of his script...
[06:07:57] <SWPadnos> KimK, note that the older "hostmot-4" configuration for the 5i20 is deprecated
[06:08:18] <SWPadnos> it should work, but I think that driver is going to get removed in 2.3 or 3.0 (or thereabouts)
[06:08:27] <SWPadnos> it is replaced by the hostmot2 driver
[06:09:07] <SWPadnos> so some pin names will change, and loading definitely changes (since hostmot2 needs at least 2 modules loaded)
[06:11:15] <KimK> SWPadnos: Yes, I have done extensive editing on Anders' XML and HAL files to change them over to the new hostmot2 format. But I haven't been able to test them yet beyond the error list above (multiple components with the same name? Oops, did I copy and paste something once too often, LOL?)
[06:11:48] <SWPadnos> you should also note that you need to either (a) source emc-environment (for a run-in-place installation), or (b) change the paths to the realtime script (/etc/init.d/realtime) and remove the path from halcmd
[06:11:50] <SWPadnos> ok
[06:13:07] <SWPadnos> you could try pastebinning the actual hal file, unless you're fixing it as a learning exercise
[06:13:44] <KimK> Yes, I would appreciate any advice you have on this "realtime start" business, this is my forst encounter with it. I installed CVS (all of it? not sure) a few days ago so I should have files to look through even if a few days old.
[06:13:54] <KimK> forst = first
[06:14:07] <KimK> Although I may be lost in the forst?
[06:14:48] <SWPadnos> I think that some time after Anders made that script, Jeff added "halrun"
[06:15:15] <KimK> Is there a better way to do what I'm trying to do?
[06:15:22] <SWPadnos> so if you have a hal file that loads the required modules (using loadusr), that would be better
[06:15:24] <SWPadnos> yes
[06:16:03] <SWPadnos> halrun -I <somehalfile> will load realtime, execute the hal file, and drop you into a halcmd session
[06:16:04] <KimK> This is my first solo attempt at a pyVCP project, except for following along at Ray's workshops.
[06:16:15] <SWPadnos> it then cleans up realtime when you exit from the halcmd session
[06:17:24] <KimK> OK. I'll read further.
[06:17:29] <SWPadnos> if you want to see that the panel has everything you think it should, you can load it without loading any drivers or the realtime system
[06:18:01] <SWPadnos> if you've already gotten that far, then it's time to make connections to the hostmot2 driver, and for that you need realtime
[06:18:13] <SWPadnos> there may be a halrun man page
[06:18:20] <KimK> Show just the panel? I haven't gotten to that part yet.
[06:18:34] <SWPadnos> ok, then realtime is well into the future
[06:18:52] <SWPadnos> I don't know if pyvcp needs it (it could, since you need HAL loaded)
[06:19:14] <SWPadnos> actually, I guess that means you do need RT unless you have a sim compile
[06:21:32] <KimK> Anders' script apparently starts realtime. I couldn't make that work on mine, but if there's a better and more modern way to do it, I'm all for it. I'll keep reading.
[06:21:48] <SWPadnos> ok, enjoy
[06:21:59] <SWPadnos> I guess I should get to bed. good luck with it
[06:23:38] <KimK> SWPadnos: Thanks for the help! "SWPadnos: Hey Kim, you're going the wrong way!" KimK: "Thaaaaanks!" (No seriously, you saved me a lot of time avoiding a dead end, thanks.)
[06:25:24] <KimK> ("Thaaaaanks" as in sound of two people going in opposite directions)
[06:29:15] <KimK> I'll expire the above pastebin, since it's a wheel that does not need to be reinvented.
[13:35:44] <Lerman_______> Lerman_______ is now known as Lerman
[14:02:04] <skunkworks_> logger_emc: bookmark
[14:02:04] <skunkworks_> Just this once .. here's the log:
http://www.linuxcnc.org/irc/irc.freenode.net:6667/emc/2009-01-06.txt
[14:21:11] <archivist> * archivist reads as well, add a webcam in front of scope for the audience
[14:35:08] <skunkworks_> heh
[14:35:13] <skunkworks_> that might be a plan.. ;)
[14:35:47] <archivist> then add remote control to the scope :)
[14:36:14] <archivist> jmk was itching to twiddle the controls
[14:45:13] <skunkworks_> I can imagine - it is like trying to help someone troubleshoot a computer over the phone. (when the person doesn't have the greatest grasp of computers)
[14:47:03] <archivist> I used to do phone support for electronic kits
[14:47:34] <skunkworks_> I bet that was fun :)
[14:48:17] <archivist> it was, our nickname for customers was loons
[14:48:52] <archivist> I started there doing the in house repairs on the kits
[14:50:14] <archivist> we saw some horrors
[15:06:49] <eric_unterhausen> I'm starting to obsess over where I put two ballscrews
[15:07:13] <eric_unterhausen> 6" travel, they could be anywhere
[15:07:19] <archivist> are we invited to say :)
[15:07:30] <eric_unterhausen> I think I'd know if it was there
[15:08:03] <archivist> that small would fit this machine here
[15:08:15] <eric_unterhausen> I want to make a pcb mill
[15:08:58] <archivist> I have a loose ball screw about the size of my mill
[15:09:17] <eric_unterhausen> I have some nice ones off of a puma style robot
[15:09:28] <eric_unterhausen> apparently, using a ballscrew for that is a bad idea
[15:09:53] <eric_unterhausen> I never saw that robot, they gave up on it fairly quickly
[15:09:56] <archivist> I got a Huron replacement one off ebay at the right price
[15:10:40] <eric_unterhausen> it seems like really huge stuff goes cheap on ebay sometimes
[15:10:51] <archivist> yup
[15:11:04] <SWPadnos> $1 for the item + $10000 for shipping is still a lot of money
[15:11:14] <eric_unterhausen> there were some linear rails the size of a railroad rail a while back
[15:12:14] <The_Ball> yay, i finally got my 400kg lathe in the house
[15:12:31] <SWPadnos> heh
[15:12:40] <SWPadnos> same here, only it's closer to 1000 kg
[15:12:51] <eric_unterhausen> that's a lot of lathe
[15:13:04] <skunkworks_> The_Ball: what have you been up to?
[15:13:08] <The_Ball> SWPadnos, have you converted it?
[15:13:11] <eric_unterhausen> I want to move my lathe, but I'm not looking forward to it
[15:13:15] <The_Ball> skunkworks, incredibly buzy
[15:13:19] <SWPadnos> I only put it in side yesterday
[15:13:37] <SWPadnos> I think 1 day for an HNC conversion is asking a bit much :)
[15:13:51] <BigJohnT> how did you get it off the trailer?
[15:14:06] <eric_unterhausen> inertia
[15:14:11] <archivist> we await pics
[15:14:24] <The_Ball> skunkworks, what have you been up to?
[15:14:31] <SWPadnos> BigJohnT, boom style tow truck
[15:14:39] <BigJohnT> cool
[15:14:51] <archivist> thats cheating
[15:14:57] <skunkworks_> The_Ball: making a servo amp that is turning out to be a 400khz oscollator. ;)
[15:15:07] <eric_unterhausen> I used a boom style forklift to put mine in my basement
[15:15:12] <BigJohnT> a lot safer than backing up real fast and slamming on the brakes
[15:15:17] <eric_unterhausen> double doors under the deck
[15:15:35] <SWPadnos> better for the machine too
[15:15:52] <eric_unterhausen> but as Jon Elson found out, boom style forklifts and lawns don't mix
[15:15:59] <SWPadnos> I was bummed though, apparently the wrapping wasn't good enough - the chuck is covered in rust now
[15:16:12] <SWPadnos> at least the main part of it, the face seems clear
[15:16:32] <cradek> SWPadnos: then you get to try electrolytic rust removal!
[15:16:42] <SWPadnos> uh. yay! ?
[15:16:44] <eric_unterhausen> I'd just leave it
[15:16:48] <cradek> yay!
[15:16:51] <BigJohnT> or chemistry
[15:16:58] <eric_unterhausen> or leave it
[15:16:59] <cradek> (personally, I've been looking for an excuse to try it)
[15:17:13] <skunkworks_> you mean coke? ;)
[15:17:22] <SWPadnos> well, that's just the part that I really noticed. I'm sure there are other places I didn't notice
[15:17:25] <BigJohnT> sodium nitrite, caustic soda...
[15:17:41] <SWPadnos> Naval jelly
[15:17:51] <eric_unterhausen> scraping is probably best
[15:17:55] <archivist> navel fluff
[15:18:13] <eric_unterhausen> if you use electrolysis, you have no dimensional control
[15:18:45] <archivist> angle grinder
[15:19:08] <SWPadnos> if any critical dimensions have gotten rusted, I have larger problems
[15:19:22] <jymm> WD40!!!
[15:19:35] <SWPadnos> I could soak it in PB Blaster :)
[15:19:49] <jymm> Peanut Butter?
[15:19:52] <cradek> hope the screws had oil on them...
[15:19:56] <SWPadnos> PB Blaster
[15:20:01] <SWPadnos> yeah, me too
[15:20:09] <eric_unterhausen> is it a screw mount?
[15:20:15] <SWPadnos> drive screws
[15:20:58] <eric_unterhausen> anyone know what brand of din rail terminals mcmaster sells?
[15:21:42] <SWPadnos> probably Weidmuller or Phoenix Contact
[15:21:53] <SWPadnos> or maybe On Shore, if they're like DigiKey
[15:53:45] <skunkworks_> SWPadnos: look - 2 traces..
[15:53:47] <skunkworks_> http://imagebin.ca/view/aFeOh14Q.html
[15:53:56] <SWPadnos> yay!
[15:54:38] <eric_unterhausen> yay, but I thought we saw that last night
[15:55:02] <skunkworks_> heh - I am playing the best of.. ;)
[15:55:32] <archivist> we want new releases
[15:55:45] <skunkworks_> tonight maybe.. :)
[15:55:51] <eric_unterhausen> speaking of celebrations, just got proofs from our paper on measuring bubbles
[15:56:33] <archivist> ew Im about to get a bubble for my clinometer
[15:56:46] <archivist> £70
[15:57:10] <eric_unterhausen> our bubbles cost $50k according to my boss
[15:57:19] <eric_unterhausen> someone wanted to buy them for $10k
[15:57:43] <archivist> hmm I thought 70 was expensive....
[15:57:52] <eric_unterhausen> we're special
[15:59:46] <SWPadnos> bubble based economic stimulus
[15:59:54] <SWPadnos> where do I sign up to make them? :)
[16:00:11] <archivist> thats burst and needs repair
[16:00:22] <SWPadnos> must be adifferent bubble
[16:03:15] <archivist> http://www.gandmtools.co.uk/cat_leaf.php?id=1286 the type I have that needs repair
[16:03:58] <eric_unterhausen> our bubbles are so expensive that I doubt anyone is going to buy them
[16:04:28] <SWPadnos> gubmint
[16:05:09] <archivist> I notice Hilger and Wattse went on to make pendulum clinometers
[16:20:10] <The_Ball> skunkworks, cool, i want to build some servo amps for my lathe conversion
[16:23:04] <skunkworks_> The_Ball: well - mine isn't working yet.. ;)
[16:23:37] <skunkworks_> as seen by..
http://imagebin.ca/view/iJuSAkig.html
[16:23:59] <skunkworks_> yes - that is 6v of noise..
[16:24:02] <archivist> instability
[16:24:51] <alex_joni> skunkworks_: ouch
[16:25:11] <skunkworks_> cool huh?
[16:25:23] <alex_joni> and no smoke?
[16:25:24] <archivist> one particular engineer was called instability Haywood, as he always managed to get that sort of problem
[16:26:02] <skunkworks_> alex_joni: no real smoke.. but I have taken out a couple of the driver ic's :)
[16:26:12] <alex_joni> what kind?
[16:26:18] <alex_joni> archivist: where from in the uk?
[16:26:19] <skunkworks_> they just sort of quit working with that much crap.
[16:26:32] <archivist> alex_joni, yes where I used to work
[16:26:38] <alex_joni> archivist: seen
http://www.theregister.co.uk/2009/01/06/crime_maps_live/
[16:26:47] <alex_joni> I meant where are you located in the uk?
[16:26:53] <skunkworks_> ir2184
[16:27:25] <archivist> alex_joni, without looking at maps I know Im at a hotspot
[16:28:35] <archivist> hah they claim average!
[16:28:49] <archivist> http://crimemaps.derbyshire.police.uk/map/?q=de11+8da&url=
[16:28:58] <alex_joni> skunkworks_: I said the whole faimly is evil :D
[16:29:20] <skunkworks_> heh - I don't blame the driver ic's :) yet..
[16:29:54] <archivist> I would be looking at ground references
[16:30:37] <alex_joni> archivist: swadlincote?
[16:30:43] <archivist> yes
[16:30:51] <alex_joni> sounds like an interesting name
[16:30:53] <alex_joni> :D
[16:31:25] <archivist> that claims Newhall next to swad is lower crime, we would not believe that
[16:31:59] <archivist> ex mining area
[16:32:19] <alex_joni> heh.. maybe less registered crimes :D
[16:33:40] <archivist> not the nicest of places :)
[16:34:07] <alex_joni> * alex_joni makes mental note: drive around newhall next to swad
[16:34:30] <archivist> boss lives in Newhall
[17:35:12] <jepler> * jepler tries to figure out why his client forgot about freenode at midnight
[17:35:47] <jepler> "00:05:35 [freenode] -!- Irssi: Unable to connect server chat.freenode.net port 6666 [Name or service not known]"
[17:37:04] <archivist> what I saw * jepler has quit (Read error: 113 (No route to host))
[17:37:54] <jepler> I know I had a service interruption at midnight .. so I guess I'm just not happy with how my irc client handled a temporary dns failure
[17:39:41] <archivist> I had to restart xchat once on this box when it failed to reconnect, mostly it handles it, isp changine a dns server screws all sorts up though
[17:49:45] <jepler> apparently it's a recently fixed bug in irssi.
http://bugs.irssi.org/index.php?do=details&task_id=66&string=dns&project=5&type[0]=&sev[0]=&pri[0]=&due[0]=&reported[0]=&cat[0]=&status[0]=&percent[0]=&opened=&dev=&closed=&duedatefrom=&duedateto=&changedfrom=&changedto=&openedfrom=&openedto=&closedfrom=&closedto= http://svn.irssi.org/cgi-bin/viewvc.cgi/irssi/trunk/src/core/servers-reconnect.c?r1=4739&r2=4873&pathrev=4873&root=irssi&view=patch
[17:49:53] <jepler> ugh those are some unwieldy URLs.
[17:51:58] <alex_joni> heh
[17:52:09] <alex_joni> mine seems not to be affected by that bug
[17:54:32] <cradek> mine is. often I have to kick it to reconnect
[17:54:46] <cradek> I type /connect or somesuch
[17:55:04] <alex_joni> 19:48 -!- Irssi: Client: irssi 0.8.9 (20031210 2316)
[17:55:25] <alex_joni> a bit dated ;)
[17:56:16] <cradek> 11:56:08 -!- Irssi: Client: irssi 0.8.10 (20060326 2300)
[17:56:26] <cradek> they improved by 0.0.1 in 3 years
[17:56:34] <jepler> 11:56:21 -!- Irssi: Client: irssi 0.8.12 (20071006 0939)
[17:56:46] <alex_joni> I think the last is the build date
[17:57:11] <jepler> hm, I hope not -- I just rebuilt and /upgrade'd mine
[17:58:54] <jepler> VERSION_DATE=`head -n 2 $srcdir/ChangeLog| grep '^r' | awk '{print $5}' | tr -d '-'`
[17:58:58] <jepler> it's based on the changelog
[17:59:35] <jepler> which looks like a log from svn
[17:59:53] <jepler> r4606 | coekie | 2007-10-06 09:39:55 +0000 (Sat, 06 Oct 2007) | 2 lines
[18:37:16] <alex_joni> is it just me, or is that a horrible font?
http://www.irssi.org/images/irssi_cmd_100.png
[18:39:10] <jepler> I don't think I have anything positive to say about it
[18:42:30] <alex_joni> heh
[18:42:39] <alex_joni> you're beeing excessivle diplomatic today
[18:42:53] <alex_joni> excessivly*
[18:43:08] <alex_joni> excessively even :/
[18:43:15] <seb_kuzminsky> looks very retro 8-bit
[18:43:44] <alex_joni> I think vt100 look way better
[18:43:52] <SWPadnos> it's a standard MS monospace font
[18:44:33] <archivist> he was even diplomatic on the list
[18:45:00] <alex_joni> archivist: that's whay I meant
[18:45:06] <alex_joni> anyone around houston tomorrow?
[18:45:29] <alex_joni> "US airline Continental says it will carry out "the first biofuel flight by a commercial carrier using algae as a fuel source" tomorrow."
[18:48:47] <jepler> in the unlikely event of a water landing .... ?
[18:50:29] <alex_joni> no, before taking off :)
[18:50:38] <alex_joni> http://www.theregister.co.uk/2009/01/06/continental_algae_airliner_test/
[18:51:20] <SWPadnos> I'm just hoping that Chorus Motors (or someone) can get landing gear servo drives working soon, so they can stop using jet engines for taxiing and crap.
[19:03:27] <BigJohnT> they gotta keep the AC on with something :)
[19:06:07] <archivist> add pedals and get the passengers to pedal up the taxiway
[19:06:54] <BigJohnT> that would help with the overweight problem here in the US
[19:08:14] <archivist> I was so slim when I went over there :)
[19:08:36] <archivist> although large over here
[19:09:41] <alex_joni> SWPadnos: regenerative braking sounds like a really good idea
[19:10:10] <alex_joni> that should get enough juice for lots of taxiing
[19:10:21] <SWPadnos> yes, that's the main efficiency improvement in the Honda hybrids
[19:10:25] <SWPadnos> heh
[19:10:36] <micges> hello all
[19:10:41] <SWPadnos> that voltage spike at landing is a killer though :)
[19:11:47] <alex_joni> hi micges
[19:12:48] <micges> anyone have tested in real world gantrykins ?
[19:14:02] <jepler> certainly not the author :-P
[19:14:40] <micges> hehe :)
[19:15:02] <micges> Is my info is correct: kins module for XYYZ machine
[19:16:36] <micges> how about homing ?
[19:17:20] <jepler> all gantrykins does is copy one axis position to one or more joint positions
[19:17:24] <jepler> it doesn't change homing in any way
[19:18:10] <jepler> IMO the method of gantry homing is still up in the air
[19:19:08] <archivist> hmm carefully
[19:19:28] <jepler> emc currently homes each joint independently, though you can start joints homing at the same time with the home sequence
[19:19:32] <alex_joni> gantrykins is not the best name imho
[19:19:42] <alex_joni> it should be genkins or something like that
[19:20:02] <alex_joni> it can do j0<->z, j1<->y, j2<->x mapping
[19:20:11] <alex_joni> or all kinds of simple joint/axis redirection
[19:20:28] <micges> I have one gantry with homing, a copy of that machine will be managed with emc
[19:20:53] <micges> homing of them is very difficult (what I see)
[19:22:58] <micges> feedback position is readed only from one axis
[19:23:15] <micges> s/axis/joint
[19:23:19] <alex_joni> micges: in emc2 you could do both
[19:23:23] <jepler> I notice that dallur's configuration (dallur-thc) just sends the same step pulses to two motors..
[19:23:31] <alex_joni> with a custom component which checks the difference between them, etc
[19:23:44] <jepler> with two joints you do get a check for following error on each joint.
[19:24:01] <jepler> with gantrykins, though, you throw away one joint position when finding cartesian position
[19:37:56] <micges> jepler: your sane2.patch is working fine
[19:38:15] <jepler> micges: OK, thanks for testing
[19:38:35] <jepler> I'll probably check it in on TRUNK soon. I don't think I'll try to make this change on 2.2, because the workaround is fairly good.
[19:39:30] <micges> tommorow If I will have chance I'll test it on that same mill
[19:39:52] <micges> jepler: I agree
[19:42:02] <jepler> micges: your gantry machine, does it have a non-emc control now? how does it do homing of the gantry axis?
[19:42:19] <micges> war with wires on machine with gantry will over in a week, then I compose come config and test kins
[19:42:38] <jepler> ah so presently it has no control
[19:42:50] <micges> atmelx2 - electronic interpolation
[19:43:07] <micges> no, I have old one and new one
[19:43:50] <micges> on old its something like this:
[19:44:01] <seb_kuzminsky> i just got the email about electing a new board of directors for emc2
[19:44:06] <seb_kuzminsky> what does the board do?
[19:44:26] <micges> when homing one joint is master
[19:45:02] <micges> then after some searching latching they make an offset between them and this is working
[19:45:09] <alex_joni> seb_kuzminsky: oh, lots of things
[19:45:35] <alex_joni> obviously sounding important is the nr. one
[19:46:09] <alex_joni> http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?BoardOfDirectors
[19:46:09] <micges> I will describe you detailed tomorrow, maybe will helps in any way
[19:46:43] <micges> good night all
[19:47:12] <jepler> seb_kuzminsky: the duties of the board of directors are described here:
http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?BoardOfDirectors
[19:47:46] <archivist> * archivist sees alex_joni's list mail and block nominates the current post holders :)
[19:47:47] <seb_kuzminsky> * seb_kuzminsky should rtfm
[19:50:24] <BigJohnT_> BigJohnT_ is now known as BigJohnT
[19:50:42] <alex_joni> archivist: keep it to one/email though
[19:51:18] <archivist> it was a joke Im not that cruel
[19:51:56] <archivist> I value your work
[20:26:04] <cradek> "I am pleased to say that this candidate is a former colleague of mine."
[20:26:15] <cradek> "I am pleased to say that this candidate is a former colleague of mine."
[20:26:19] <cradek> oops
[20:26:39] <cradek> "I most enthusiastically recommend this candidate with no qualifications whatsoever."
[20:27:03] <jepler> ooh those are good
[20:27:23] <archivist> where are you getting them from
[20:27:59] <cradek> "I can assure you that no person would be better for the job."
[20:28:20] <cradek> http://www.ewin.com/articles/liar.htm
[20:29:10] <jepler> I assume you're studying what to say when you make your nominations..
[20:29:45] <skunkworks_> I thought that fit me just fine.. :)
[20:30:44] <jepler> skunkworks_: yeah I think that's basically what my nomination of you says, in fact
[20:35:51] <skunkworks_> jepler: thanks :) wait... ;)
[20:36:13] <alex_joni> you're stuck with it now :P
[22:03:15] <alex_joni> good night all
[22:06:19] <seb_kuzminsky> good night alex
[22:11:39] <maddash> GOOD NIGHT
[22:13:55] <maddash> my 9v blew up a pin
[22:48:44] <skunkworks_> funny - I sent an email nominating chris.. (chis) and john T - but only the one fro chris showed up.
[22:50:18] <archivist> "Chis keeps plugging away at emc2 making it better and better. You would"....
[22:51:45] <skunkworks_> yep - but the one for john t has not shown up.. :)
[22:52:18] <archivist> yup cant find it here
[22:52:36] <skunkworks_> I sure it will show up in a few hours ;)
[22:53:56] <archivist> sf does have its moments
[22:54:55] <archivist> I have noticed dead periods with gmail as well
[22:55:14] <skunkworks_> bbl
{kind=link}
{kind=link}