Back
[00:02:32] <Gamma-X2> eric_U want me to email it?
[00:03:53] <BigJohnT_> Gamma did you post the manual? I had to log off for a sec
[00:05:33] <Gamma-X2> nah its a pdf
[00:05:36] <Gamma-X2> dont know how lol
[00:06:20] <Gamma-X2> BigJohnT i sent it to ur email
[00:06:20] <BigJohnT_> do you have link to it?
[00:06:24] <BigJohnT_> ok
[00:06:58] <BigJohnT_> this will take a while the string is really buzzing out to the highway
[00:07:18] <Gamma-X2> lol
[00:07:23] <Gamma-X2> get faster internet man! lol
[00:07:27] <Gamma-X2> get a satelite or sumtin lol
[00:07:33] <BigJohnT_> ok, I got it
[00:07:49] <BigJohnT_> I live on a dead end dirt road off of a dirt road in a valley
[00:08:07] <Gamma-X2> i want to figure out how i can also add the vfd in and make it only power the motor... but also be controlled by emc and the buttons on the front of the machine for off, on and reverse.
[00:08:34] <BigJohnT_> what do you mean controlled by emc?
[00:08:51] <Gamma-X2> id also like to get rid of the air brake on the system and just use the vfd
[00:09:07] <BigJohnT_> to brake the spindle
[00:09:07] <Gamma-X2> the vfd can be controlled by emc
[00:09:37] <BigJohnT_> you have a vari speed pulley or a step pulley on the machine?
[00:09:50] <Gamma-X2> vari but theres a low gear and high gear,
[00:10:37] <BigJohnT_> so you want to use the vfd to control the speed?
[00:11:03] <Gamma-X2> correct
[00:11:20] <toastydeath> exciting!
[00:11:46] <BigJohnT_> why do you want to complicate the start up at this point?
[00:11:50] <Gamma-X2> lol i know, i also have to seperate the motor from the machine to use the vfd to control the speed.
[00:12:06] <Gamma-X2> BigJohnT cause im already adding emc into this bitch lol might aswell do it all now.
[00:12:38] <toastydeath> + auto control of hi/low
[00:12:57] <BigJohnT_> the wonderful thing about emc is you can build it up from humble beginnings so to speak
[00:13:24] <Gamma-X2> how the hell can i do auto hi low? lol
[00:13:48] <BigJohnT_> just my 2 cents but "I" would get the emc to servo bridge worked out first
[00:14:00] <BigJohnT_> with a pneumatic cylinder?
[00:14:21] <SWPadnos> gear change isn't as trivial as it sounds (if it sounds easy to you) :)
[00:14:32] <BigJohnT_> hows that
[00:14:42] <Gamma-X2> sounds realy hard lol
[00:14:46] <Gamma-X2> SWPadnos whats up man
[00:14:53] <BigJohnT_> lever that changes from direct drive to the back gear right?
[00:15:07] <Gamma-X2> correct
[00:15:26] <toastydeath> pulse the spindle while using a pneumatic cylinder to change the gear, use limit switches to figure out when it's done?
[00:15:29] <Gamma-X2> SWPadnos want me to send u the schematic of the pin connector? im tryin to figure it out now.
[00:15:33] <SWPadnos> well, I think to do it right on a Bridgeport-style machine, you have to stop the motor, attempt to shift to neutral, then possibly drive the motor backwards a little to disengage the gear
[00:15:53] <SWPadnos> then, you need to let the motor spin a little at very low speed as you try to shift into gear
[00:16:04] <SWPadnos> you can't just ram it into the new gear
[00:16:05] <toastydeath> it just falls out of gear, no rotation
[00:16:06] <Gamma-X2> i aint puttin it into low gear
[00:16:10] <Gamma-X2> low gear is like 600 rpm.
[00:16:26] <Gamma-X2> max
[00:16:31] <toastydeath> you can do it reliably with just a motor pulse.
[00:16:50] <SWPadnos> right - you have to let the motor "find" the gear mesh point
[00:16:56] <eric_U> can't you just fondle the spindle a little bit?
[00:16:58] <SWPadnos> a quick pop is fine
[00:17:02] <SWPadnos> not automatically
[00:17:02] <BigJohnT_> exactly
[00:17:08] <SWPadnos> unless you have an automatic spindle fondler
[00:17:23] <Gamma-X2> well there no chance in hell of me doin that right now lol so lets talk about what i need to do... please! hahahah
[00:17:25] <SWPadnos> which I don't wnat to know about
[00:17:35] <BigJohnT_> Gamma it's not likely you will need to do that without tool changes so you will be there to change gears
[00:17:54] <Gamma-X2> sounds good to me. like isaid low gear max is 600 rpm.
[00:18:09] <eric_U> Gamma-X2 email me the schematic
[00:18:15] <Gamma-X2> email addy?
[00:18:30] <eric_U> unterhausen@yahoo.com
[00:18:31] <BigJohnT_> Gamma I looked at the schematic and don't see the mains connections on it
[00:18:33] <SWPadnos> I don't really have the time to look at it carefully at the moment
[00:18:41] <SWPadnos> sorry
[00:18:49] <Gamma-X2> its cool
[00:18:58] <eric_U> I thought the mains were seperate
[00:19:16] <eric_U> this is supposed to be the connections between control cabinets, correct?
[00:19:22] <Gamma-X2> yes
[00:19:31] <Gamma-X2> BigJohnT_ i think is talkin about the other one.
[00:19:33] <Gamma-X2> sent
[00:19:50] <Gamma-X2> this is what gerald bouvier jr sent me today
[00:20:13] <Gamma-X2> he is a great man to speak with if u have any anilam problems!!!! he gave me info free of charge on a control 30+ years old lol
[00:20:19] <BigJohnT_> I see X1 and X2 which is normally 120vac inputs to the transformer but you should have a single point of connection for the power
[00:20:25] <Gamma-X2> almost 30 atleast lol
[00:20:45] <BigJohnT_> gerald will try his best to help you
[00:20:51] <Gamma-X2> hes awsome!
[00:21:35] <BigJohnT_> Gamma is there a main disconnect somewhere on a panel?
[00:23:21] <Gamma-X2> BigJohnT_ what are u reffering to? the back cabinet for the main power or the servo box?
[00:23:43] <BigJohnT_> the main power
[00:24:08] <BigJohnT_> you should just have to feed 3 phase of the correct voltage to the mains to get the entire machine running
[00:24:51] <eric_U> these guys were watching to many bomb defusing movies "cut the purple wire first"
[00:25:34] <BigJohnT_> In the schematic you sent me it looks like 120vac is connected to X1 and X2
[00:25:50] <BigJohnT_> eric you always cut the red wire
[00:26:03] <eric_U> that's the output
[00:26:45] <Gamma-X2> lol BigJohnT_ theres 3 wires that have fuses on them in te main panel.
[00:26:51] <eric_U> x1x2 goes to some diodes
[00:27:11] <BigJohnT_> to a bridge I saw
[00:27:23] <eric_U> so it can't be the power in
[00:27:46] <eric_U> there is a reference to power cable in that goes to pcb 801
[00:28:06] <BigJohnT_> so H4 and H3
[00:28:33] <eric_U> just start attaching 220 to anything shiny, our problems will be over
[00:28:43] <Gamma-X2> lol
[00:29:02] <BigJohnT_> looks like 801 gets it power from somewhere else somehow
[00:29:07] <Gamma-X2> eric_U the question i had for u was what pins are what on the lower part of the schematic
[00:29:36] <Gamma-X2> BigJohnT_ i was askin u how i can use the vfd for jsut the motor while supplying power to the other devies such as coolant pump.
[00:30:16] <Gamma-X2> brb smoke.
[00:33:30] <eric_U> seems like the spindle relay could be used to switch the vfd on/off at logic level voltages
[00:36:03] <BigJohnT_> my neck hurts from looking at it sideways...
[00:37:04] <eric_U> I gotta 22" monitor
[00:37:24] <eric_U> I only have to scroll it a little
[00:37:32] <BigJohnT_> I got a newer anilam and don't have spindle control
[00:37:36] <eric_U> but darker colors would be nice
[00:37:39] <BigJohnT_> it's a $500 option
[00:38:05] <BigJohnT_> both of the moniters here are 20"
[00:38:20] <eric_U> I almost bought a 22" for my mill
[00:38:31] <BigJohnT_> one flat screen on monster that weighs 250 lbs
[00:38:37] <BigJohnT_> one
[00:38:48] <eric_U> actually, the local walmart had 20" on clearance for 150
[00:39:00] <eric_U> but I don't shop there
[00:39:15] <BigJohnT_> that sucks when you think about what you paid a year ago
[00:39:27] <eric_U> I paid $350 for my 22"
[00:39:30] <eric_U> a year ago
[00:39:53] <BigJohnT_> anyway I have to cut off a shaft and can't make heads or tails from the drawing
[00:40:00] <eric_U> I want a 28", but I just dropped too much money on my tablesaw
[00:40:07] <BigJohnT_> bbl
[00:44:19] <eric_U> anyone know what time the game is?
[00:46:52] <jepler> maddash: when modifying code, don't leave the old code inside a comment. that's the only problem that stands out in that patch. fix and resubmit.
[00:48:48] <Gamma-X2> i think i know what i can do
[00:49:13] <Gamma-X2> im pretty sure the vfd can supply power to 2 differant motors. the 3hp and the 1/6 power coolant pump.
[00:49:14] <eric_U> get an engine lift, take the engine out of your car
[00:49:39] <eric_U> put the engine on the edge of the table, lay down under the mill
[00:49:54] <Gamma-X2> the only thing stopping me from usiong the vfd to control spindle is the coolant pump...
[00:49:55] <eric_U> there is a spindle relay
[00:50:13] <Gamma-X2> yes but the coolant pump runs on the same 3 phase input as the spindle
[00:50:15] <eric_U> are you sure it's three phase?
[00:50:24] <Gamma-X2> theres 4 wires goin to it.
[00:50:28] <Gamma-X2> 3 black and a white.
[00:50:32] <Gamma-X2> mights been green
[00:50:37] <Gamma-X2> any way its still 3 phase
[00:50:42] <eric_U> you probably don't want to do that
[00:51:08] <Gamma-X2> y jnot
[00:51:15] <eric_U> make a reactive phase converter
[00:51:16] <Gamma-X2> if the vfd can control both motors.
[00:51:19] <Gamma-X2> ?
[00:51:41] <SWPadnos> it sill likely be impossible to tune the VFD if you connect two motors to it
[00:51:43] <eric_U> for the coolant pump
[00:51:46] <SWPadnos> s/sill/will/
[00:51:51] <eric_U> swill?
[00:51:59] <SWPadnos> nil
[00:52:02] <eric_U> sounds like dinner at the unterhausen hause
[00:52:17] <Gamma-X2> SWPadnos im pretty sure theres multiple outputs for 2 diff motors im checking now.
[00:52:29] <BigJohnT_> gamma where do the wires from the coolant pump go?
[00:52:31] <eric_U> wouldn't surprise me at all
[00:52:33] <SWPadnos> the VFD has one output, I can pretty much guarantee that
[00:52:53] <eric_U> how much hp is the coolant motor?
[00:53:21] <BigJohnT_> without some kind of feedback how can emc control the spindle?
[00:53:32] <SWPadnos> the VFD controls the spindle
[00:53:40] <eric_U> open loop
[00:53:51] <BigJohnT_> 0-10v or something
[00:53:56] <SWPadnos> without feedback, EMC can't correct the speed, but it should be close with the VFD
[00:54:23] <BigJohnT_> so you can't do rigid threading
[00:54:33] <SWPadnos> note too that the motor speed isn't the spindle speed, if you have a pulley/vari-speed and multiple gears
[00:54:35] <eric_U> how could you without feedback
[00:54:45] <BigJohnT_> exactly
[00:54:58] <SWPadnos> you need a separate spindle encoder for rigid tapping
[00:55:00] <eric_U> my point is, nobody can
[00:55:06] <BigJohnT_> you have to be there to change tools so you can set the rpm
[00:55:22] <eric_U> no, open loop is close enough for almost all tools
[00:55:47] <BigJohnT_> but you have to manually change the tool your standing in front of the machine
[00:56:03] <BigJohnT_> just whirl the dial
[00:56:06] <eric_U> of course, I haven't looked at the implementation so don't listen to me
[00:56:31] <BigJohnT_> I listen to everyone
[00:56:53] <ALS> does the spindle have to turning to change speeds anyway
[00:56:56] <eric_U> you could just whirl the dial, but g-x2 has other problems
[00:57:06] <eric_U> not with a vfd
[00:57:07] <BigJohnT_> if it's a bp clone no
[00:57:16] <BigJohnT_> to change gears
[00:57:26] <BigJohnT_> to change the vari speed yes
[00:57:37] <ALS> that what i ment
[00:57:58] <eric_U> mine has an air actuator to spin that dial
[00:58:02] <eric_U> pita
[00:58:19] <BigJohnT_> eric you got a tool changer
[00:58:24] <eric_U> no
[00:58:31] <BigJohnT_> hmmm
[00:58:44] <eric_U> but both the spindle brake and speed change are through the control
[00:58:55] <eric_U> it's a little goofy
[00:58:57] <BigJohnT_> ok
[00:59:03] <BigJohnT_> what is it?
[00:59:12] <eric_U> bridgeport series II
[00:59:22] <BigJohnT_> boss?
[00:59:31] <eric_U> not sure
[00:59:47] <eric_U> i basically bought bare iron
[00:59:58] <eric_U> not even any motors
[01:00:02] <BigJohnT_> I have a series 1 with anilam 1100m controls
[01:00:18] <BigJohnT_> my buddy has a boss with bp controls
[01:00:36] <eric_U> All I have left of the bp controls is the cabinets
[01:00:52] <BigJohnT_> u using emc to control?
[01:01:19] <eric_U> trying to
[01:01:35] <BigJohnT_> know the feeling
[01:01:44] <BigJohnT_> well the dinner bell has rung bbl
[01:01:58] <eric_U> I was making better progress before I smashed my finger with my servo motor
[01:02:28] <eric_U> this schematic has no indication of encoders anywhere
[01:03:13] <eric_U> Gamma-X2: do your encoders hook directly to the other cabinet?
[01:07:58] <eric_U> moog hydrapoint was a crazy machine
[01:31:31] <dmess> moog hydra point..... its broke.. D go have a look... open the back.. who's the moron who used ALL yellow wire.... Big guage...... touch.... NOT wire.. 1/16" airlines..... i closed the cabinet.... saied GOOD luck...... last time she ran...
[01:32:13] <skunkworks> air logic?
[01:32:22] <BigJohnT_> eric_u Gamma does not have encoders
[01:32:47] <dmess> yes.. and hydraulic actuators for the motion control..
[01:36:20] <dmess> we had 1 guy who could ONLY run that machine.... or manuals.... he wanted me to make her work again.... it was nothing but a bridgeport under the covers.... made in connecticut...
[01:36:52] <eric_U> BigJohnT, I thought he had linear encoders
[01:39:38] <ds2> nice -
[01:39:40] <ds2> http://www.synthfool.com/laser/
[01:40:14] <BigJohnT_> eric I think it is linear scales if i remember correctly
[01:44:31] <Gamma-X2> eric_U only glass scales.
[01:44:38] <Gamma-X2> adam1 did it so im gunna try it out.
[01:58:56] <eric_U> hydraulic actuators with a pneumatic control system, that's a recipe for success in anyone's book
[01:59:33] <Gamma-X2> i hate to say this but i think i might need another vfd of phase converter.....
[01:59:49] <eric_U> how many hp is the coolant motor?
[02:00:18] <Gamma-X2> 1/6th
[02:00:35] <Gamma-X2> but i want to control the spindle with the vfd like reverse and all that from emc
[02:00:50] <eric_U> you should be able to buy a vfd for that on ebay for $25
[02:01:01] <Gamma-X2> no way lol
[02:01:11] <dmess> 20 or so.... dirty air ended up being the issue.... but was archaich... in that shop...
[02:03:16] <Gamma-X2> what do u mean 20 or so?
[02:03:26] <eric_U> $25
[02:03:42] <dmess> so to MELT it went... no 20 hp
[02:04:03] <eric_U> 20hp hydraulics?
[02:04:23] <Gamma-X2> what is dmess talkin about lol
[02:04:35] <eric_U> moog hydrapoint, stay in the game
[02:04:52] <Gamma-X2> lol
[02:05:06] <eric_U> 1/2 hp, $90 shipped
[02:05:08] <dmess> the coolant pumps were 20 hp... the hydraulics ran at 3000 psi plus...
[02:05:15] <Gamma-X2> lol
[02:05:33] <dmess> a MOOG
[02:05:52] <Gamma-X2> eric_U im not lookin to spend any more money, why dont i jsut buy a static phase converter for that since i dont want reverse or anything on it.
[02:05:57] <eric_U> most industrial hydraulics runs at 3000 psi
[02:06:06] <eric_U> good idea
[02:06:15] <eric_U> that's what I said earlier
[02:06:48] <dmess> except MY hydrostatic winche.... that'll pull to 8500 +
[02:07:08] <Gamma-X2> eric_U hmmm
[02:07:19] <eric_U> they all wanted to go to 10kpsi a while back
[02:07:21] <SWPadnos> thou hast an hydraulicce winche? is it fyne?
[02:07:47] <dmess> we tow small unpowered aircraft...
[02:08:26] <BigJohnT_> Gamma I do all my milling dry, so to start do you "have" to have a coolant pump?
[02:08:29] <dmess> it was designed and built by ME for a friend..
[02:08:59] <Gamma-X2> BigJohnT_ no lol i just thought it was the right thing lol
[02:09:09] <eric_U> that way you can watch ebay for a $25 1/3 hp vfd
[02:09:25] <dmess> we are the BEST hydrostatic tows ON THE PLANET....
[02:09:40] <dmess> para or delta..
[02:10:20] <BigJohnT_> coolant is not needed unless you are doing high speed production work
[02:10:29] <BigJohnT_> and it makes a large mess
[02:10:30] <Gamma-X2> ....
[02:10:39] <Gamma-X2> how high speed are we talkin?
[02:11:05] <eric_U> if you don't know, you don't need it
[02:11:11] <eric_U> yet
[02:11:15] <BigJohnT_> real heavy cuts and what eric said
[02:11:21] <cradek> get a squirt bottle
[02:11:28] <Gamma-X2> true
[02:11:34] <cradek> you will be standing right there anyway, it'll give you something to do
[02:11:39] <Gamma-X2> lol
[02:11:39] <dmess> 2x diameter is a cut
[02:11:41] <cradek> (seriously)
[02:12:05] <BigJohnT_> all you need to know is you can't go fast enough for aluminum and if your chips are turnging blue on steel slow your rpm and feed down
[02:12:28] <Gamma-X2> ok
[02:12:36] <eric_U> if you do much steel, you'll be wishing you had it
[02:12:37] <BigJohnT_> or your cutting tool will turn blue then you turn red
[02:12:38] <Gamma-X2> u dont need any coolant at all for aluminum?
[02:12:51] <cradek> you definitely need coolant for aluminum
[02:12:53] <BigJohnT_> I don't use coolant for any metal
[02:13:00] <SWPadnos> a little tap magic really helps, but that's lubricant, not coolant
[02:13:05] <cradek> unless you cut very light
[02:13:30] <BigJohnT_> I just use air and take medium cuts with no problem
[02:13:39] <SWPadnos> plus, tap magic aluminum (the new formula) has a nice cinnamon-like smell
[02:13:43] <Gamma-X2> BigJohnT_ i want to do this as a small business though
[02:13:50] <dmess> alu... if its 60XX series.... krank and burn... its crap 70XX is more condusive to a good part
[02:13:53] <Gamma-X2> SWPadnos wow i gotta get me some of that! lol
[02:14:09] <eric_U> I think you should get it running
[02:14:10] <BigJohnT_> Gamma cool, but get the basic part running...
[02:14:17] <Gamma-X2> true
[02:14:17] <SWPadnos> aluminum has a much nicer finish if you use a little tap magic
[02:14:27] <eric_U> which means spending $100 on a vfd, or skipping the coolant
[02:14:30] <BigJohnT_> then think of speed once you have customers
[02:14:33] <SWPadnos> other fluids probably dfo the same thing
[02:14:35] <SWPadnos> do
[02:14:38] <Gamma-X2> theres a relay in there to do the reverse and on off....
[02:14:38] <eric_U> or replacing the coolant motor with 110 single phase
[02:15:01] <SWPadnos> or buying a capacitor
[02:15:01] <Gamma-X2> but im worried it might give bad feedback to the vfd
[02:15:14] <BigJohnT_> I cut aluminum dry and get a mirror finish on facing cuts
[02:15:33] <Gamma-X2> BigJohnT_ what ffeds and speeds are u using?
[02:15:47] <eric_U> vfd and capacitor may cost the same with careful shopping
[02:15:59] <SWPadnos> not if you shop carefully for both ;)
[02:16:14] <SWPadnos> but a retail cap is probably the same as a "careful" VFD buy
[02:16:14] <Gamma-X2> my vfd was 350
[02:16:18] <SWPadnos> ouch
[02:16:25] <Gamma-X2> its got all the bells and whistles.
[02:16:27] <ds2> where are they selling VFDs for the price of a cap?
[02:16:33] <Gamma-X2> and takes single phase for a 3hp motor.
[02:16:34] <eric_U> on ebay
[02:16:34] <SWPadnos> mine were $125 and $85 (I think) - for 3HP and 1HP respectively
[02:16:35] <dmess> sould.. nice to see someboby else has found MY touch
[02:16:41] <ds2> and by that, I mean any cap!
[02:16:57] <SWPadnos> well, there are some pretty expensive caps out there ...
[02:17:05] <ds2> ebay actually has VFDs that sold for sub $50?!?
[02:17:16] <eric_U> I bought my last one for $50
[02:17:21] <Gamma-X2> its a hitachi vfd with a lot of extras buuilt in
[02:17:22] <ds2> hmmm
[02:17:22] <SWPadnos> I found one where the listing had "frequency" mis-spelled
[02:17:27] <SWPadnos> not a lot of bids on that one ;)
[02:17:32] <Gamma-X2> i can network it to my computer through an rj45 connector and cable
[02:17:44] <eric_U> that will do you a lot of good
[02:17:56] <Gamma-X2> i know
[02:18:01] <ds2> a $50 VFD make a serious contender for those $20 SCR based DC controllers
[02:18:08] <SWPadnos> well, if it's modbus, then we can control it with EMC - I just need to see the register layout
[02:18:17] <Gamma-X2> yes modbus
[02:18:27] <SWPadnos> ok. send me one and I'll write a driver :)
[02:18:35] <Gamma-X2> lol
[02:18:37] <eric_U> where did you get it Gamma-X2?
[02:18:44] <Gamma-X2> driveswarehouse.com
[02:19:07] <Gamma-X2> hitachi sj200-022nfu2
[02:20:24] <eric_U> that schematic you gave has a 19 and 37 pin connector, is that what you were calling the 50 pin connector?
[02:20:38] <Gamma-X2> yes,
[02:20:43] <Gamma-X2> my bad! lol
[02:21:01] <Gamma-X2> those 2 connectors feed into that plug, weich connects to the control unit
[02:21:03] <eric_U> there are letters that look like they correspond to a mil spec connector
[02:21:11] <Gamma-X2> corect
[02:21:32] <eric_U> where do your linear scales hook up?
[02:22:03] <eric_U> is that to the other box?
[02:22:07] <Gamma-X2> 3 other inputs on the control
[02:22:17] <eric_U> on this schematic?
[02:22:18] <Gamma-X2> there 6 pins each.
[02:22:20] <Gamma-X2> no
[02:22:28] <SWPadnos> Gamma-X2, hmmm. I'm betting by that part number that your VFD is 3-HP (just under actually, but close enough) on 3-phase, but it's probably got to be derated to 2HP on single phase
[02:22:29] <eric_U> so they hook to the other control box
[02:22:46] <Gamma-X2> SWPadnos nope. 3 hp
[02:22:48] <eric_U> I always thought the de-rating was rather silly
[02:23:03] <Gamma-X2> output on the vfd with single phase created into 3 phase is 11 amps.
[02:23:05] <SWPadnos> heh - except that the components won't handle the current need if you don't derate ...
[02:23:15] <eric_U> the capacitor
[02:23:27] <eric_U> somehow I doubt they skimped on the diodes
[02:23:33] <SWPadnos> uh
[02:23:43] <SWPadnos> well, who knows
[02:24:05] <eric_U> one of the advantages of this drive IIRC
[02:24:28] <Gamma-X2> ?
[02:24:44] <eric_U> no derating for single phase input
[02:24:55] <Gamma-X2> yay
[02:25:02] <eric_U> you said that, spanky
[02:25:12] <Gamma-X2> lol
[02:25:27] <SWPadnos> oh - ok. that is an advantage for this drive :)
[02:25:51] <Gamma-X2> eric_U is it possible to tell wich wire goes to what with that schematic? or is it to blunt.
[02:25:53] <SWPadnos> my Mitsubishi needs to be derated, as well as the Allen Bradley (I think - not sure I have the manual for that one)
[02:26:11] <BigJohnT_> it's alive and I'm only bleeding a little :)
[02:26:34] <eric_U> it looks to me that the analog command are on Pins A-F
[02:26:53] <eric_U> mitsu says to derate
[02:27:00] <eric_U> so does baldor
[02:27:23] <Gamma-X2> ok
[02:27:43] <eric_U> Gamma-X2, it's not a given, read your manual
[02:28:10] <Gamma-X2> eric_U does it sound like i should hook them up in sequence on the boards im gettin and then configure by the diagram? that was a nube question i knowlol
[02:28:37] <eric_U> do you amps have anything written on them?
[02:29:01] <Gamma-X2> xyz
[02:29:09] <eric_U> very funny
[02:29:10] <Gamma-X2> theres labels. other than that not sure.
[02:29:12] <Gamma-X2> lol
[02:29:31] <eric_U> did they look like those pictures someone found the other night?
[02:30:22] <Gamma-X2> no
[02:31:25] <eric_U> here is my guess: pin A goes to pin 11, pin B goes to pin 12, pin C goes to pin 23 pin D goes to pin 24 pin E goes to pin 35, pin F goes to pin 36
[02:31:34] <eric_U> got that?
[02:33:31] <eric_U> problem with the rest is figuring out how the limit switches and estop circuit actually work
[02:33:54] <eric_U> that should be something you can do with a ohmmeter
[02:39:51] <Gamma-X2> ok
[02:40:06] <Gamma-X2> im goin to bed enough of this tonite lol thanks eric_U I appreciate it a lot. lata
[02:40:14] <eric_U> bye
[03:05:32] <maddash> why isn't my patch being committed?
[03:06:10] <gezar> i do not know
[03:06:41] <gezar> but im now done with raidng in the world of warcraft
[03:07:10] <SWPadnos> maddash, did you notice jepler's comment on it?
[03:07:13] <gezar> im sorta sad but then again, ive wasted a lot of life playing
[03:07:41] <SWPadnos> gezar, let me introdice you to
http://ogame.org/
[03:07:52] <SWPadnos> if you want something to waste^Wkill time
[03:08:02] <SWPadnos> free!
[03:08:36] <Gamma-X2> is it possible to make a brake resistor?
[03:09:08] <SWPadnos> err - you can use any resistor with the correc tcharisteristics
[03:09:19] <SWPadnos> I'm assuming you're not talking about making your own resistor ...
[03:09:29] <gezar> http://www.wowjutsu.com/us/hellscream/ the guild im in is eternity its not worth it anymore to play
[03:09:29] <SWPadnos> (which is also possible, but probably not worth the effort)
[03:09:36] <Gamma-X2> no just a brake resistor to put inline with the vfd
[03:09:48] <SWPadnos> you don't put braking resistors in line
[03:09:56] <Gamma-X2> so any extra feedback generated by the motor would go to the resistor
[03:09:58] <SWPadnos> the VFD should have a separate set of terminals
[03:10:07] <Gamma-X2> thats what i meant sorry for my wording
[03:10:07] <maddash> SWPadnos: none
[03:10:14] <maddash> SWPadnos: i checked the logs
[03:10:17] <SWPadnos> read the VFD manual, understand the VFD manual, then come back with questions ;)
[03:10:25] <maddash> what vfd?
[03:10:32] <SWPadnos> [19:47:12]<jepler>maddash: when modifying code, don't leave the old code inside a comment. that's the only problem that stands out in that patch. fix and resubmit.
[03:10:44] <SWPadnos> that was for Gamma-X2
[03:10:56] <maddash> jepler: :(
[03:10:59] <SWPadnos> hitachi sj200-022nfu2
[03:11:24] <SWPadnos> that's what CVS is for - you don't need to keep the old code in the source file - you can always get it back if you want
[03:11:25] <gezar> maddash says to himslef "but I didnt add code for a vfd wtf are you talking about"
[03:11:29] <SWPadnos> heh
[03:11:41] <Gamma-X2> i did read it.
[03:11:43] <maddash> SWPadnos: when the feck did he say that?
[03:11:53] <Gamma-X2> just want to know if u can make that brake resistor instead of buyin it.
[03:12:01] <maddash> !log
[03:12:03] <SWPadnos> [22:10:52]<SWPadnos>[19:47:12]<jepler>maddash: ...
[03:12:06] <maddash> !bookmark
[03:12:17] <SWPadnos> looks like around 19:47:12 EST
[03:12:21] <SWPadnos> heh
[03:12:24] <SWPadnos> looking for this:
[03:12:26] <maddash> ah, it's 08.txt now
[03:12:28] <SWPadnos> logger_emc, bookmark
[03:12:28] <SWPadnos> Just this once .. here's the log:
http://www.linuxcnc.org/irc/irc.freenode.net:6667/emc/2008-01-08.txt
[03:12:32] <maddash> I was still in 07.txt
[03:12:40] <gezar> Gamma-X2: yes you can, but if we or I make that recomendation to you and something bad happens then well, that would be bad for everyone
[03:12:45] <SWPadnos> not many changes there, I imagine ;)
[03:12:56] <maddash> * maddash is a time traveler
[03:13:25] <SWPadnos> Gamma-X2, there's a difference between "make a resistor" and "use a resistor that isn't labelled as a braking resistor"
[03:13:50] <SWPadnos> I'm going to let you in on a little secret
[03:13:54] <gezar> I dont know squat about breaking resistors, I do know that folks have used home appliance parts as breaking resistors, but Im not qualified to recomend anything
[03:13:56] <Gamma-X2> sorry again lol i meant when u see a bterm braking resistor its reffering to the setup u buy, kinda like a phase converter
[03:13:57] <SWPadnos> as soon as I find it again - hold on
[03:14:03] <Gamma-X2> lol
[03:14:06] <SWPadnos> bterm?
[03:14:20] <Gamma-X2> wow im bad tonite...
[03:14:25] <Gamma-X2> the term*
[03:14:33] <SWPadnos> ah
[03:15:03] <SWPadnos> usually they have very high current and power ratings, at least for short durations
[03:15:29] <Gamma-X2> ok
[03:15:43] <gezar> oh, and breaking resistor has nothing to do with a physical break on a motor
[03:16:16] <SWPadnos> well - sort of, but the amount of braking you get is proportional to the motor speed
[03:16:25] <Gamma-X2> i know its just used to fill up with energy in the form of heat.
[03:16:52] <gezar> what else takes energy and makes heat, for oh say cooking?
[03:17:21] <Gamma-X2> a coil
[03:17:28] <SWPadnos> = a resistor
[03:17:36] <Gamma-X2> oh wow...
[03:17:51] <SWPadnos> you could hook up a space heater to the braking resistor terminals
[03:17:56] <SWPadnos> (or at least part of one)
[03:18:12] <Gamma-X2> wow
[03:18:24] <gezar> now were talking home shop machinist
[03:18:29] <Gamma-X2> lol
[03:18:39] <Gamma-X2> SWPadnos it wont mess the vfd up correct?
[03:18:47] <SWPadnos> dunno
[03:19:02] <Gamma-X2> hahaha ok
[03:19:28] <gezar> Gamma-X2: thats the part where I cant help you with, however, I have a mitsu vfd programer book in the trunk of my car, would you like me to get it for you?
[03:19:33] <SWPadnos> bummer. there's an ebay seller that used to have lots of power resistors, but I don't see them any more
[03:20:03] <SWPadnos> Gamma-X2, you need to figure out what value resistor (resistance and power rating) you need for your motor
[03:20:06] <maddash> http://www.pastebin.ca/846149
[03:20:09] <maddash> jepler: ^^
[03:20:10] <Gamma-X2> ok
[03:20:12] <SWPadnos> the VFD manual should have guidelines (hopefully)
[03:20:16] <Gamma-X2> it does
[03:20:22] <Gamma-X2> says recomended type
[03:20:25] <Gamma-X2> some graphs
[03:20:37] <SWPadnos> those graphs are probably important ...
[03:20:59] <maddash> jepler: actually, I have a more elegant patch, but it'll involve patching almost everything inside src/emc/usr_intf
[03:21:21] <SWPadnos> that's not more elegant ;)
[03:21:59] <maddash> oh, but it is
[03:22:03] <cradek> elegance of a change is inversely proportional to the number of lines in the patch
[03:22:14] <maddash> because every file inside usrintf would be smaller
[03:22:23] <gezar> Gamma-X2: oh oh oh, dont try to hook your coolant motor up to the vfd, just have your spindle on it
[03:22:32] <maddash> and all the common code would be consolidated into one "libusrintf.cc"
[03:22:42] <gezar> get a simple little giant pump that runs on 110 to do that
[03:23:08] <SWPadnos> hmmm. I can't seem to find man pages on the esleep function
[03:23:15] <Gamma-X2> srb 300
[03:23:23] <maddash> hey, do you guys remember how PMS Is calculated?
[03:23:41] <gezar> 1/4 of the month =pms
[03:23:46] <maddash> specifically, how the rad(2) is gotten
[03:23:54] <maddash> er, RMS*
[03:23:57] <SWPadnos> heh
[03:24:01] <maddash> root mean sq voltage
[03:24:14] <SWPadnos> you mean how the sqrt(2) is gotten?
[03:24:15] <maddash> eg, the AC In your wall is RMSV= 115
[03:24:21] <maddash> yes, yes
[03:24:28] <gezar> square of the sums added i think?
[03:24:41] <gezar> high and low of the sin wave
[03:24:55] <SWPadnos> sqrt(2) is what you get when you integrate the sqrt(avg(func^2))) if a sin function
[03:24:58] <gezar> maybe multipled, I cant remember
[03:25:02] <SWPadnos> s/if/of/
[03:25:20] <SWPadnos> it's the square Root if the Mean of the Square of the function
[03:25:23] <SWPadnos> gah
[03:25:25] <SWPadnos> s/if/of/
[03:25:49] <gezar> I love how my ignorance tosses SWPadnos into linguistic fits
[03:25:59] <SWPadnos> no, it's my typoing tonight :)
[03:26:26] <maddash> yess!! i win the bet!
[03:26:31] <maddash> my dad is wrong
[03:26:48] <SWPadnos> the constant is different for a square wave, for instance
[03:27:07] <SWPadnos> http://en.wikipedia.org/wiki/Root_mean_square
[03:29:22] <Gamma-X2> wow the brake resistor is 459.00! lol
[03:29:35] <SWPadnos> dollars or ohms?
[03:29:59] <maddash> pesos
[03:30:01] <Jymmm> both
[03:32:13] <maddash> you know what I hate about hotmail and aol mail? the ads.
[03:32:33] <Gamma-X2> dollars! lol
[03:35:31] <Gamma-X2> if anyone is board check this out see what u think
http://www.hitachi.us/supportingdocs/forbus/inverters/Support/BRD-E2_E2-N_S2_Manual.pdf good night
[04:29:44] <maddash> boing boing
[04:37:13] <maddash> what can you do 4k flash on the atiny25?
[04:37:18] <maddash> attiny*
[04:40:00] <SWPadnos> I can write a radio transceiver that uses bit-banging and does various timing functions
[04:41:48] <SWPadnos> though I think I had to go to 8k to fit the GUI into it
[04:42:06] <SWPadnos> err - UI, not really much G on a 97x32-dot LCD
[04:42:06] <maddash> so much for the "avr stepgen"
[04:42:27] <SWPadnos> heh - FPGAs are much better suited to that task
[04:42:47] <SWPadnos> especially when you add quadrature counting to the equation (not truly necessary for steppers though)
[04:42:51] <maddash> fpgas are much better suited than ucontrollers for everything
[04:43:09] <SWPadnos> no - sequential things with decision-making are better suited to microcontrollers
[04:43:28] <SWPadnos> though you can put a micro into an FPGA if you need to, but that's needlessly complex
[04:44:10] <maddash> [sigh]
[04:44:51] <maddash> how I wish I had the $$
[04:45:21] <maddash> well, what about a tp, then? I bet a ucont is better for that job
[04:45:54] <SWPadnos> trajectory planner? you need a pretty big micro to make it work well
[04:46:05] <SWPadnos> like a PowerPC or ARM
[04:46:40] <SWPadnos> hmmm. actually, a single-axis TP isn't that bad if it can be decomposed into integer math
[04:46:52] <maddash> you mean, fixed point
[04:47:07] <SWPadnos> FP / integer - more or less the same thing in most small micros
[04:47:27] <SWPadnos> you place the binary point between two bytes so shifting is free
[04:47:49] <maddash> I don't get it
[04:48:13] <SWPadnos> if I have 16 bits, I'd choose that to be 8.8 bits - the high byte is the units and the low byte is the fraction
[04:48:26] <SWPadnos> if I multiply the two numbers, I get a 4-byte value
[04:48:45] <SWPadnos> the high two bytes are the integer portion, the low 2 bytes are the fraction
[04:49:11] <SWPadnos> I can check for overflow by looking for a nonzero value in the highest byte, or loss of precision by looking at the lowest byte
[04:49:34] <SWPadnos> otherwise, I just use the two middle bytes as the result - that constitutes an automatic shift of 8 bits
[04:50:01] <SWPadnos> err - if I multiply two numbers of that kind - not the two parts of my 16-bit number
[04:50:24] <maddash> ohhhh
[04:50:56] <maddash> still, how would checking the lowest byte help with the loss of precision? you're not storing it because you can't, right?
[04:51:15] <SWPadnos> that's not as useful as overflow detection
[04:51:56] <SWPadnos> with the AVR, multiplication and addition/subtraction of multi-byte values has very little overhead
[04:52:13] <SWPadnos> addition or subtraction are one cycle per byte
[04:52:24] <SWPadnos> multiplication takes a little longer, but there are tricks
[04:52:50] <SWPadnos> I think my 32x32 bit multiply routine takes 46 cycles, including hte 7 for the call+return (assuming registers are loaded)
[04:53:19] <SWPadnos> hmmm - actually, I think it's a 16 x 32 multiply, with all 48 bits of the result available
[04:53:40] <maddash> maybe it's easier if I go with the rabbit instead
[04:54:05] <SWPadnos> heh
[04:54:16] <maddash> rabbit ucont, I meant
[04:54:20] <SWPadnos> nope - unless you already have the Windows-based compiler
[04:54:41] <SWPadnos> (the only compiler there is)
[04:55:08] <maddash> I think they include a cd with every shipment of hardware
[04:55:31] <SWPadnos> if you buy a development kit, maybe
[04:55:42] <SWPadnos> but not for the "bulk" Modules
[04:56:03] <SWPadnos> and you still need the download cable to get started - I don't know if that works in wine (if you plan to use Linux)
[04:56:08] <SWPadnos> the compiler probably does work
[04:56:10] <maddash> it doesn't
[04:56:15] <maddash> not the serial download
[04:56:19] <SWPadnos> right
[04:56:30] <maddash> not to mention the lack of a serial port on this box
[04:56:42] <SWPadnos> that's why I still consider designing an ARM based rabbit replacement
[04:57:05] <maddash> do you specialize in embedded?
[04:57:33] <SWPadnos> usually
[04:57:55] <SWPadnos> mostly AVR, ever since they came out (PIC before then)
[04:58:03] <SWPadnos> and 8051 variants before that
[04:58:10] <SWPadnos> plus PC stuff
[04:59:00] <maddash> now i have a better picture of you
[04:59:25] <SWPadnos> ewwww
[04:59:27] <SWPadnos> :)
[04:59:28] <maddash> isn't arm is insanely expensive? compared to avr, or even the rabbit
[04:59:32] <SWPadnos> nope
[04:59:55] <SWPadnos> $10 in single quantity, 512k flash, 32-bit, 55 or 80 MHz (forgot which)
[05:00:07] <maddash> is it cisc or risc?
[05:00:17] <maddash> 80mhz seems pretty darn high
[05:00:24] <SWPadnos> loads of I/O, including USB, ethernet, serial, lots of I/O bits, etc.
[05:00:36] <SWPadnos> it's mostly RISCy
[05:00:40] <SWPadnos> there's gcc for it
[05:00:42] <maddash> even the rabbit 4000 only goes up to 55mhz, and the 4000 doc claims to be cutting-edge
[05:00:42] <SWPadnos> and Linux
[05:00:50] <SWPadnos> and the rabbit is 8/16 bit
[05:01:13] <SWPadnos> plus it's something like 2-6 cycles per instruction for many instructions, many many more for others
[05:01:33] <SWPadnos> I think even NOP is 2 cycles on a rabbit
[05:01:36] <maddash> it sounds like a wonderchip; why do people even bother with anything else?
[05:01:53] <SWPadnos> the cheaper ARMs are pretty recent
[05:02:02] <SWPadnos> and you do need a few dollars worth of supporting hardware
[05:02:15] <SWPadnos> (like an ethernet jack with built-in filters, for example)
[05:03:12] <maddash> some people like to buy the entire board, without having to make their own pcb and toppings
[05:03:33] <SWPadnos> you can get ARM boards, but I don't know if any are similar to the Rabbit
[05:03:50] <SWPadnos> that's why I consider making one that plugs into the Rabbit socket :)
[05:05:17] <maddash> ...I don't think that would work, considering that the rabbit socket is locatted on a rabbit board, whose components might operate along some protocol that only the rabbit is aware of
[05:05:42] <SWPadnos> no, the connector pinout is known
[05:05:49] <SWPadnos> it's in the Gecko G-Rex manual
[05:05:57] <SWPadnos> among other places
[05:06:10] <SWPadnos> the ARM chips are very low power too, so I'm sure that wouldn't be a problem
[05:06:35] <maddash> what board is this "rabbit socket" sitting on?
[05:06:56] <SWPadnos> well, the reason I got annoyed was the Gecko G-Rex
[05:07:22] <SWPadnos> http://geckodrive.com/product.cfm?pid=17
[05:07:36] <SWPadnos> the rabbit processor plugs onto that board
[05:07:59] <SWPadnos> the Rabbits aren't quite complete - you need a carrier to get any of the I/O out to the real world, plus a power supply
[05:08:33] <eric_U> I built a board that the rabbit plugs into
[05:08:41] <maddash> errr wtf? if you don't add $50, gecko'll just give you a board that does nothing?
[05:08:51] <SWPadnos> no, it has GeckoMotion in it
[05:09:14] <SWPadnos> which is a text language that can do some motion and I/O - not quite G-code but still functional for a lot of stuff
[05:09:33] <maddash> geckomotion needs to live in the rabbit, right? and the latter only comes if you pay $50 more
[05:09:44] <SWPadnos> no, the G-Rex comes with a Rabbit, I believe
[05:09:46] <SWPadnos> at least mine did
[05:10:04] <eric_U> lotta people selling those things
[05:10:24] <SWPadnos> microcontroller boards?
[05:10:31] <eric_U> grex
[05:10:51] <SWPadnos> really - I didn't realize anyone had incorporated it into their CNC products
[05:10:59] <eric_U> the thing is, mach still works pretty well from a parallel port
[05:11:13] <eric_U> so people buy a grex, realize they arent going to use it and sell it
[05:11:20] <SWPadnos> ah
[05:11:29] <SWPadnos> lots of people getting rid of them then ;)
[05:11:48] <eric_U> much higher percentage than the drives, that's for sure
[05:11:55] <SWPadnos> heh
[05:13:09] <eric_U> Bill gates decides to kill Mach off, and you'll see them selling like hotcakes
[05:13:26] <SWPadnos> hmmm. it looks like those ARM chips have gone up a little in price - the 512k ones are $12 and up now, and there isn't as good a selection
[05:13:47] <eric_U> which company?
[05:13:55] <SWPadnos> ST, NXP, Atmel ...
[05:14:08] <SWPadnos> but that's the DigiKey single unit price
[05:14:49] <eric_U> nxp used to be famous?
[05:14:56] <gezar> why would bill kill mach?
[05:15:02] <SWPadnos> there
[05:15:05] <eric_U> bill is an evil old man
[05:15:18] <SWPadnos> there's a Microsoft Robotics Kit or something like that now
[05:15:25] <eric_U> joke
[05:15:26] <SWPadnos> so who knows
[05:15:32] <SWPadnos> I'm not joking :)
[05:15:39] <eric_U> there is a real time windows too
[05:15:52] <SWPadnos> there was a thread about it recently on CCED (recently may be 6 months ago)
[05:15:56] <eric_U> they hand out money if you use it
[05:16:03] <SWPadnos> sure - NT 3 had that ;)
[05:17:01] <eric_U> linux is so much superior for robotics
[05:45:25] <maddash> * maddash died
[12:03:23] <alex_joni> bbl
[12:06:30] <BigJohnT> when I start up Axis the X: starts at -0.5562 and the rest are at 0.0000... any ideas?
[12:07:55] <fenn> you moved X to -0.5562 and turned off emc?
[12:08:27] <fenn> no write permission to position.txt?
[12:08:40] <BigJohnT> what is position.txt
[12:09:30] <fenn> a flunky .var file wannabe
[12:09:57] <BigJohnT> where is it located?
[12:10:14] <fenn> same location as the .ini file i think
[12:10:40] <BigJohnT> no file like that in the config directory
[12:11:06] <fenn> you have to specify the filename "position.txt" in the .ini file
[12:11:17] <fenn> if it's not in the .ini i think it doesn't get written
[12:12:08] <BigJohnT> nothing in the ini
[12:12:19] <fenn> in that case, emc starts at 0,0,0.. but you may have offsets in effect from .var
[12:13:18] <BigJohnT> I just jogged it to 0 then shut it down then started it back up and it's -0.5562 again
[12:13:43] <BigJohnT> .var?
[12:14:08] <fenn> in the same directory as your .ini file
[12:14:37] <fenn> it's where emc stores the offsets like g54
[12:15:07] <BigJohnT> there is a line 5221 0.556166
[12:15:22] <fenn> change that to zero if it bugs you.
[12:15:48] <BigJohnT> It's not that it bugs me but the position is not correct after homing
[12:16:06] <BigJohnT> after homing it does not go to 0.0000
[12:17:09] <fenn> set it to display absolute coordinates
[12:17:33] <fenn> or program g53
[12:17:51] <fenn> issue.. blah
[12:18:08] <BigJohnT> I see a g54 in the active g-codes box
[12:19:06] <BigJohnT> where do you set it to display absolute coordinates?
[12:19:33] <fenn> aww are you really gonna make me look
[12:19:50] <BigJohnT> I looked ....
[12:20:42] <fenn> view->show machine position
[12:21:49] <fenn> god i hate g-code
[12:21:54] <BigJohnT> ok I was looking for an incrimental/absolute selection
[12:23:05] <fenn> g10 l2 p1 x0
[12:23:18] <fenn> wtf stupid way of setting zero is that
[12:23:54] <fenn> and then it doesn't do what you want anyway
[12:24:00] <BigJohnT> I agree
[12:24:09] <BigJohnT> hows that
[12:24:24] <fenn> well, say i touch off on a part and want to set z=0
[12:24:40] <fenn> instead of say... g54.1 z0
[12:25:15] <fenn> i have to do this g10 l2 p1 z<oh, look at the DRO, subtract from zero>
[12:26:14] <fenn> unless the DRO is displaying g54 coordinates in which case you're lost
[12:26:49] <BigJohnT> yes
[12:28:04] <BigJohnT> I've never selected View Show Relative Position, I wonder how it got changed...
[12:28:47] <fenn> it's the default
[12:30:12] <BigJohnT> so when you home it homes to absolute but displays relative that's confusing
[12:30:36] <BigJohnT> I must have run an example g code that screwed with the g54
[12:33:55] <fenn> it makes more sense to me to start off in g53 (no work offsets applied)
[12:34:21] <BigJohnT> I agree and that's the way my Anilam starts off when you power it up
[12:34:39] <fenn> you can add g53 to your ini
[12:36:08] <cradek> http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?CoordinateSystems#So_if_you_re_lost_what_should_you_do
[12:36:09] <fenn> RS274NGC_STARTUP_CODE = G53
[12:36:21] <cradek> fenn: that's not how G53 works
[12:36:52] <fenn> g53 is not modal?
[12:36:58] <cradek> and AXIS lets you clear/zero a coordinate system, it's on the menu
[12:37:02] <cradek> no
[12:39:39] <BigJohnT> cradek: how does g53 work?
[12:40:18] <cradek> first of all is your problem fixed?
[12:40:44] <BigJohnT> yes, I zeroed out the offsets
[12:40:48] <cradek> sounds like you used touch off to set a work offset, and that was saved when you shut down, which is the correct behavior
[12:41:48] <BigJohnT> when you boot up emc and home an axis it should show the offset positions? not the actual positions?
[12:42:23] <cradek> well you can set the gui to show you either one, but generally you want the offset positions, since you are in an offset coordinate system (g54)
[12:43:03] <cradek> saving the work offset is a feature. otherwise you lose your part/vise/work position which would be very irritating
[12:43:10] <fenn> cradek: why is position.txt a separate file?
[12:43:32] <cradek> it's joint position
[12:43:37] <BigJohnT> If I move the table while emc is off I loose the part position
[12:43:40] <cradek> for machines without home switches
[12:43:47] <cradek> BigJohnT: not if you have home switches
[12:43:50] <anonimasu> heh..
[12:44:04] <fenn> cradek: why not put it in the .var file?
[12:44:25] <cradek> fenn: because the interpreter controls the var file, and the interpreter doesn't know anything about joint position (or joints)
[12:44:33] <BigJohnT> ok up to the accuracy of my home switches...
[12:45:00] <cradek> BigJohnT: if you have home to index, you get exactly the same position back up to the accuracy of your machine's encoders
[12:45:19] <BigJohnT> cradek: you assume I'm using steppers...
[12:45:24] <BigJohnT> servos i mean
[12:45:32] <BigJohnT> i'm using steppers
[12:45:43] <cradek> yes if you have steppers you get just the accuracy of your home switches
[12:46:19] <BigJohnT> so I would never use the offsets left over from the last time I ran...
[12:46:21] <cradek> (that's the best anyone can do with steppers)
[12:46:31] <BigJohnT> yep I agree
[12:47:03] <cradek> ok, sounds like then you'll always touch off again, no problem
[12:47:52] <BigJohnT> so the RS274NGC_STARTUP_CODE = G53 should be standard on stepper ini's
[12:49:12] <cradek> no fenn's advice is wrong, that's not a useful setting
[12:49:18] <fenn> sry
[12:49:45] <fenn> g92 *handwaving*
[12:49:47] <cradek> and my stepper machine has home switches that give me the same 'step' every time, and I'd be unhappy if my work position was always lost
[12:50:16] <cradek> I just can't see that as a feature
[12:51:26] <BigJohnT> so you trust the position you get from a microswitch?
[12:52:14] <BigJohnT> *reading g92*
[12:52:30] <cradek> yes my testing shows it repeats within about one step
[12:53:02] <cradek> not a matter of trust/faith, I tested it with an indicator
[12:53:16] <BigJohnT> what kind of home switches do you use?
[12:53:30] <cradek> silly little microswitches
[12:53:43] <BigJohnT> must be the same ones I have
[12:54:04] <cradek> http://timeguy.com/cradek/01198731403
[12:54:32] <cradek> maybe you should test yours
[12:54:58] <BigJohnT> so if I don't want to start up in relative mode how can I config it?
[12:55:03] <cradek> I've gotta run.
[12:57:14] <BigJohnT> hmmm
[13:00:06] <BigJohnT> www.metalworking.net/Dropbox/g92test1.pdf
[13:05:11] <BigJohnT> what section would you put the RS274NGC_STARTUP_CODE in?
[13:09:15] <fenn> traj
[13:09:26] <BigJohnT> thanks
[13:11:18] <BigJohnT> I still default to g54...
[14:01:56] <x3rox> I want to wish everybody a Happy New Year.
[14:06:30] <x3rox> Because I have now -- after a long delay some time to continue building my CNC mill (and I almost finished the electronic part now), it comes to do first tries together with EMC2. Next step is installing EMC on my testing PC, I just download the latest version. Can somebody tell me the default parallel port pin assignment for EMC2 (if there is one)? 3-axis steppers with step/dir.
[14:08:15] <x3rox> Nobody here?
[14:09:22] <x3rox> Hi, ALS!
[14:09:52] <archivist> run stepcong and it shows the default
[14:10:00] <archivist> stepconf
[14:10:59] <x3rox> Ok, thank you. Are there some important (noticable) changes in EMC2 within the last half year?
[14:11:19] <archivist> dunno just setting up mine
[14:12:06] <ALS> x3rox: you should run latancy test first on your pc
[14:13:15] <x3rox> My mill (it is a used engraving machine I try to give a new life) has 3 end-switches. Should I chain them or connect them separately?
[14:13:23] <skunkwork_> x3rox: yes - tons of changes..
[14:14:40] <x3rox> ALS: How do I run this latency test?
[14:14:45] <cradek> if the home switches are connected to separate inputs you can home all at the same time. otherwise you have to do it sequentially.
[14:14:53] <ALS> all depends on how many pins for i/o you have to use
[14:15:08] <x3rox> I have one parallel port.
[14:15:30] <skunkwork_> latency-test from terminal
[14:15:53] <skunkwork_> x3rox: what kind of engraving machine?
[14:16:59] <x3rox> Oh, It's a Gravograph VX92. Very heavy, with 2A steppers and "trapezoid threads"
[14:17:24] <skunkwork_> cool - I had just goofed around with something similar..
[14:18:09] <skunkwork_> x3rox:
http://www.youtube.com/watch?v=dKz81fY1OjY
[14:18:31] <x3rox> I thought this is best for first steps. Because I want to mill primarily PCB's and cutouts in plastic enclosures, it will be perfect.
[14:18:33] <skunkwork_> x3rox:
http://www.youtube.com/watch?v=a_OUNLruaVQ
[14:19:00] <skunkwork_> x3rox: like this?
http://www.youtube.com/watch?v=Og6V-nS2dig :)
[14:19:09] <x3rox> Hey, this IS my machine!!! :-D
[14:19:26] <skunkwork_> http://www.youtube.com/watch?v=Hdhn_j6PrCw
[14:21:08] <skunkwork_> here are some pictures.
http://www.electronicsam.com/images/engraver/
[14:21:22] <skunkwork_> I sold it a few months ago.
[14:21:31] <x3rox> skunkwork_: Did you rin it with 1:2 transmission on the Z-axis, or did you change it to 1:1 ?
[14:21:58] <skunkwork_> I used the 1:2 belt drive.. yes.
[14:22:17] <x3rox> Is it fine enough if I run half-steps?
[14:22:21] <skunkwork_> But I was running microstepping drives 1000 steps per rev of the stepper motor
[14:23:24] <x3rox> It's a very robust hardware, isn't it?
[14:25:10] <gezar> hello
[14:25:14] <x3rox> Hi!
[14:25:25] <skunkwork_> well - iirc it is 4tpi - so that is 4/2*400 or 800 steps per inch or .00125" per step.. if I did that right.
[14:25:57] <skunkwork_> I thought the machine was built very well.. It has spring loaded nuts also
[14:26:43] <gezar> the only thing I never liked about spring loaded nuts to take up backlash was teh extra wear chances placed on the nut and screw
[14:26:54] <x3rox> Exactly, my machine has them, too. 0.00125"/step should be fine.
[14:27:05] <skunkwork_> http://www.electronicsam.com/images/engraver/stepperlead.JPG
[14:27:29] <skunkwork_> that might be pushing it for circuit board milling... but it is worth a shot.. :)
[14:28:20] <skunkwork_> you can always change it.
[14:31:37] <skunkwork_> mine had limit switches at both ends of travel for x and y - z only had one at the top.
[14:31:46] <x3rox> skunkwork_: What are the major changes in EMC2 in the last half year?
[14:32:20] <x3rox> I have only 3 switches, one on every axis.
[14:33:53] <ALS> no limit switchs
[14:36:06] <anonimasu> hm
[14:36:13] <anonimasu> do you guys have a better idea then spring loaded nuts..
[14:36:15] <anonimasu> ?
[14:36:49] <x3rox> Of course! ball geared nuts. Costs very much!
[14:37:01] <anonimasu> um..
[14:37:11] <ALS> x3rox:
http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl/emcinfo.pl?UPDATING ,lists some changes
[14:37:25] <anonimasu> x3rox: you are overestimating how good they are
[14:37:49] <anonimasu> x3rox: even good ballcsrews have backslash..
[14:37:52] <x3rox> They have less friction. Nothing else.
[14:38:56] <anonimasu> they have lots of things they are better at,,
[14:38:56] <x3rox> I see no further advantage (except they possibly live longer in heavy usage).
[14:39:05] <anonimasu> pitch accuracy for one
[14:39:43] <x3rox> Well, depends on your needs if this is important. ;-) Why are you asking?
[14:41:21] <x3rox> Should I even istall EMC2 for first tests to the HDD, or can I do that with the life-CD?
[14:41:33] <x3rox> My download just finished.
[14:42:36] <skunkwork_> you can use the livecd.. Expecially to do the latency test and such.
[14:43:07] <x3rox> What is minimum for EMC2? (CPU and freq.)
[14:43:32] <x3rox> I don't want to win a race, with so thin tools I only can move slowly...
[14:45:25] <ALS> what is your pc ram and cpu specs
[14:46:01] <skunkwork_> I have run it on a 400mhz pentium II but 600 PIII works pretty decent. Your going to need atleast 256megs or ram.
[14:46:19] <x3rox> VIA C7 with 1GHz and 512...1024MB RAM?
[14:47:54] <skunkwork_> someone on here was just playing with something similar..
[14:48:40] <x3rox> strong enough for my "sandbox milling"?
[14:49:11] <x3rox> I've read that a too weak CPU needs special configuration of EMC, otherwise it crashes...
[14:49:19] <skunkwork_> if you don't have problems with latency.. that should work great. Keep in mind you may have problems with the on-board video. (if it is on the motherboard)
[14:49:56] <ALS> x3rox:
http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl/emcinfo.pl?TweakingSoftwareStepGeneration
[14:50:21] <x3rox> I read about that repeatedly. What is the problem with OnBoard graphics?
[14:50:50] <skunkwork_> if it uses shared memory - it doesn't play well with the realtime.
[14:50:54] <archivist> weeeeeeeeeeee emc drives my steppers
[14:51:47] <ALS> you took for a spinnnn?
[14:51:50] <skunkwork_> archivist: great! :)
[14:52:03] <x3rox> Is there a new (updated) doc available as PDF/PS for download?
[14:52:14] <archivist> spinning right now!
[14:52:25] <fenn> archivist: now run daisy.ngc
[14:52:42] <ALS> http://www.linuxcnc.org/docs/devel/html/
[14:54:01] <archivist> where is it fenn
[14:54:12] <x3rox> ALS: Did you every try to _print_ that out? -> Therefore I prefer .PDF or .PS... ;-)
[14:54:22] <ALS> no
[14:54:27] <gezar> wtf tornado warning, see you gusy
[14:54:35] <fenn> archivist: nc_files.. axis should open to the directory automatically.. but it's 4 axis now that i look :(
[14:55:09] <archivist> ah not configure 4th yet (wired for 4 though)
[14:55:40] <skunkwork_> gezar: where are you?
[14:57:16] <gezar> about 45 minutes north north west, directly in the path of a storm cell
[14:57:49] <gezar> im that from little rock
[14:58:08] <gezar> and the storm is ove me, but the bad areas or shear areas are headed this way
[14:58:12] <jepler> x3rox: my uninformed speculation is that with onboard, shared-RAM video, certain video operations take over the system memory bus for a long time. One possible candidate operation is block move, which is what caused trouble on the mazak -- moving windows around while running emc.
[14:59:37] <x3rox> Well, so I will plug in a cheap AGP card with nVidia chipset. (an MX400 or similar). Is this fine?
[15:00:00] <fenn> hmm where did the daisy youtube video go? or was it never posted?
[15:00:06] <cradek> avoid nvidia chips
[15:00:07] <gezar> i guess im going to just go inside, and read till it passes
[15:00:29] <x3rox> I have always best results with them?!
[15:01:22] <cradek> they cause trouble with realtime
[15:01:33] <jepler> I haven't run any "modern" video cards with emc -- mostly older (even PCI) ATI and Matrox cards
[15:01:48] <x3rox> Which one: Graphic cards or MoBo chipset?
[15:02:16] <jepler> at least at one time, the nvidia closed source driver was a real-time killer.
[15:02:56] <x3rox> Oh, so if I run it with linux' open nv driver, it is better? (w/o 3D support)
[15:03:07] <jepler> some people tried to find a solution years ago, but I haven't kept track of the details. here's a 2005 thread:
http://www.nvnews.net/vbulletin/showthread.php?t=60619
[15:03:29] <x3rox> What's with VIA chipsets?
[15:05:00] <x3rox> I'm just reading the html-docu about the parallel port setup wizard... Reads great. :D
[15:05:43] <jepler> let me know any trouble you encounter
[15:05:52] <jepler> it is still fairly new, and has had some rough edges (much improved in 2.2.2, but still..)
[15:05:59] <x3rox> Is somebody able (who has all this docs in original) to generate ONE PDF or PostScript file of them?
[15:08:30] <jepler> you get the full source code for the documentation in the emc source code, and the tools to build them into pdfs when you install the build-deps -- including the gui used to prepare them, lyx. In lyx, you would make a 'single document' by putting 'include's of every sub document into one .lyx file, then processing that to ps or pdf using the lyx "export" functionality.
[15:08:51] <jepler> http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?Installing_EMC2#On_Ubuntu_5_10_and_6_06_from_source http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?Installing_EMC2#Other_ways_of_getting_the_source_code
[15:09:24] <jepler> you will see what I mean when you load one of the document collections -- e.g., Master_User.lyx -- into lyx
[15:10:27] <jepler> you could also use 'pdf2ps' and 'psmerge' to simply concatenate the existing pdfs, but that duplicates some stuff
[15:10:41] <fenn> x3rox: why do you want one pdf?
[15:11:15] <jepler> (psmerge is from package psutils which is probably not installed by default; pdf2ps is from gs-common which I think is installed by default but I may be mistaken)
[15:11:17] <x3rox> Thanks. i will try that later. What I do not understand: What does EMC, if one end switch is already pressed and I have a shared end-switch line? Does it try to advance every axis a bit to get all switches open, or does it stuck?
[15:11:22] <fenn> x3rox: you've seen the separate pdf's here right?
http://linuxcnc.org/docs/2.2/
[15:11:49] <x3rox> fenn: Printing one "book" without interactions?
[15:12:45] <jepler> x3rox: when emc hits a limit switch, the operator has to decide what to do to resolve the condition. That consists of hitting "override limits", then "machine on", then by jogging one axis in the right direction.
[15:13:42] <jepler> x3rox: when homing to a shared switch, it is required that the switch start in the "open" state, and that the home sequence ensure that any axes that share a switch are not homed at the same time. Since emc is only moving one axis, it knows which axis has closed the shared home switch.
[15:19:31] <archivist> hmm note to devs update the locate db before building the live cd
[15:19:43] <gezar> okay, i got the details, yes im in the path, the storm is moving nne at about 54mph, its about 10 miles from me,
[15:20:18] <gezar> I hear hail sigh, my life sucks
[15:20:37] <archivist> tie things down! hold tight
[15:20:50] <fenn> math math bo bath 11 minutes to disaster path
[15:21:00] <ALS> Hang on gezar
[15:21:30] <x3rox> jepler: But what happens if one switch is already pressed at startup? Can EMC solfe this by itself by forwarding forst all ases a little bit?
[15:21:45] <fenn> duct tape yourself to that shaper
[15:22:01] <cradek> if you're on a limit switch the last thing you want is for the machine to move itself
[15:22:15] <jepler> x3rox: what cradek said
[15:22:41] <x3rox> sounds reasonable, too. ;-)
[15:22:50] <cradek> that is an error condition the operator must carefully figure out how to resolve
[15:23:58] <BigJohnT> jepler: are you refering to a system that "all" axis share the same input?
[15:25:14] <BigJohnT> for homing and limit
[15:25:42] <cradek> BigJohnT: you can do pretty much whatever combination you want
[15:26:34] <BigJohnT> cradek: I was wondering about the requirement for the switches to be open???
[15:27:00] <jepler> BigJohnT: the requirement that the home switch start "open" is only for shared home switches, not for non-shared home switches.
[15:27:42] <BigJohnT> ok
[15:27:43] <jepler> for non-shared home switches which start "closed" emc will move "off" the switch first
[15:28:14] <x3rox> Ok, I must close. -- Thanks for your help.
[15:29:40] <BigJohnT> If you share the home and limit switches on each axis ie. you have three inputs one for each axis that combine homing and limits do they have to be open?
[15:30:51] <cradek> no
[15:31:03] <jepler> if you share home and limit, the switch has to start out open to begin homing -- because if it's not, emc thinks you're on a limit switch and won't move the axis except in manual with "override limits" turned on.
[15:31:32] <cradek> oh, what he says
[15:32:05] <jepler> you also have to specify HOME_IGNORE_LIMITS so that tripping the switch again during the homing process isn't treated like a normal "axis on limit" event
[15:32:30] <fenn> also limit switches should be NC in case a wire breaks
[15:32:40] <fenn> (just to confuse the issue further)
[15:33:02] <jepler> yes I'm not being very careful with my lingo
[15:33:15] <fenn> but.. a limit switch is close to useless if you're also using it for homing
[15:33:23] <BigJohnT> that's the way I have it but sop for limit switches is a n/c circuit so if you cut a wire it stops. I'm using in-not on mine
[15:33:34] <jepler> When I say "closed", I mean TRUE on the hal pins, and when I say "open" I mean FALSE on hal pins.
[15:33:36] <BigJohnT> fenn you beat me too it
[15:33:50] <BigJohnT> jepler: understand now
[15:33:57] <jepler> fenn brings up an important point, I'm sorry I muddied the waters
[15:34:05] <fenn> it's BigJohnT's fault actually
[15:34:08] <BigJohnT> no problem
[15:34:10] <BigJohnT> yep
[15:35:57] <fenn> so i guess gezar is in oz by now
[15:36:14] <gezar> na, its calmed down a bit I think
[15:36:15] <BigJohnT> fenn: why do you say a limit switch is useless i you also using it for homing?
[15:36:35] <fenn> BigJohnT: if you're homing off the limit, you can't turn off the drives in hardware
[15:36:35] <gezar> tv saying that about 50 miles west on I40 some folks are hurt
[15:36:37] <skunkwork_> we had tornados here is WI yesterday.. destroyed a few houses.
[15:37:18] <fenn> BigJohnT: and if you rely on software to turn off the drives when you hit the limit, why bother with them at all? soft limits should keep you from hitting the switch (unless you aren't homed yet, but then why do you have a home switch if you dont use it)
[15:37:52] <BigJohnT> fenn: that is a good question
[15:38:14] <BigJohnT> I assumed that limit switches was good to have while running
[15:38:30] <fenn> it is, but you need separate switches
[15:38:45] <BigJohnT> hardwired into the drive?
[15:39:07] <cradek> the best limit setup is where each limit switch disables (by wiring it to the servo drive) motion in that direction
[15:39:13] <fenn> i guess you could "and" the home and limit circuits together, solely for saving an input pin
[15:41:24] <BigJohnT> so is the second best (in the case of steppers) to wire the limit switches to the enable of the drive?
[15:41:52] <cradek> yes probably so (and also wire it to emc)
[15:42:33] <ALS> the enable gets grounded #7 on geckos
[15:42:35] <cradek> how big is your machine BigJohnT?
[15:42:46] <BigJohnT> 49" x 49"
[15:43:16] <cradek> ok so big enough to maybe hurt something if it runs to the end of travel
[15:43:27] <ALS> most people don't us it though #7 gecko
[15:43:46] <fenn> it's capstan drive, aluminum extrusions..
[15:43:52] <cradek> often steppers can just go to a hard stop and jam, without causing any real problem
[15:44:03] <BigJohnT> low mass bridge unlikely to damage more than a drive belt
[15:44:16] <ALS> I had a problem using it #7 gecko
[15:44:33] <gezar> cradek: so a 200oz stepper < 200oz servo?
[15:44:55] <BigJohnT> I'm using G203v drives and they are different than the older geckos...
[15:45:02] <jepler> what is a "#7 gecko"?
[15:45:12] <ALS> term #7
[15:45:14] <cradek> pin 7?
[15:45:45] <jepler> oh
[15:46:02] <BigJohnT> so is there any way for emc to drive the stepper past the soft limits?
[15:46:28] <fenn> gezar: typically servo motors run 3k-5krpm and steppers run ~1krpm, so a 200oz*in servo motor will give you 3-5x the torque when geared down
[15:46:29] <cradek> BigJohnT: it would require a software bug to do that
[15:46:53] <fenn> gezar: but besides that, you aren't running blind, and dont have to deal with mid band resonance and so on
[15:47:07] <BigJohnT> so it is possible...
[15:47:19] <cradek> servos can "run away" much more easily than steppers
[15:47:29] <jepler> also if you stall your stepper you can subsequently hit a limit while emc thought you were within soft limits
[15:47:37] <gezar> why would you want to gear a servo down well never mind that, timming belts are great
[15:47:42] <cradek> BigJohnT: it's possible there is a bug? of course
[15:47:55] <cradek> but jepler's situation is much more likely
[15:48:02] <gezar> and home brew we want accuracy instead of 1000"/min
[15:48:31] <cradek> all sorts of things can cause an axis to not be where emc expects, even too heavy a cut can cause a stall like that
[15:48:52] <fenn> jepler: ok that explains why the dual use home/limit idea is useful
[15:49:23] <BigJohnT> so limit switches are useful even if they are hooked to emc
[15:49:28] <jepler> when you tie limit switches to enables outside of emc, how do you typically allow the amp to be reenabled so that you can move off the limit again?
[15:49:32] <ALS> gezar: I thought you wanted to be a big dog?
[15:49:34] <cradek> BigJohnT: definitely
[15:49:56] <cradek> jepler: that's why the amp has two inputs that each disable one direction of motion
[15:50:00] <gezar> ALS: ive been one, I want cool factor now
[15:50:02] <BigJohnT> on my Anilam mill you crank the handle till your off the switch then you can run...
[15:50:11] <jepler> cradek: ah, makes sense
[15:50:19] <cradek> yes, or you crank it manually somehow (very hard on some machines)
[15:50:31] <jepler> I thought I remembered something like that (something manual) on the mazak
[15:50:32] <BigJohnT> cradek: what amp?
[15:50:37] <gezar> * gezar wants to be a 34 year old student of comp sci with a cnc machine that fits in a shoe box
[15:51:18] <cradek> BigJohnT: I bet almost all servo amps have that
[15:51:24] <fenn> * fenn wants to be a space pirate with a zero-g pancake truck-stop
[15:51:27] <gezar> so now accepting dontations of a dell tablet pc
[15:51:30] <BigJohnT> so if your using steppers....
[15:52:02] <cradek> I have not seen that feature on any stepper drives
[15:52:23] <ALS> the 203v doen't have disable term #7?
[15:52:32] <cradek> not one disable for each direction
[15:53:08] <ALS> but he has cranks
[15:53:09] <gezar> you know, I guess it would be cooler to use say, a grex and a battery pack to run a small robotic arm that attaches to a desk to hold pencil and stuff, and while it has a pencil it dances it around in the air, or doodles on its own scratch pad till its removed?
[15:53:11] <BigJohnT> yes it has terminal 7
[15:53:39] <ALS> you could use that
[15:54:25] <jepler> for example, see pdf page 7 in
http://www.pacsci.com/support/documents/manuals/SA4000.pdf, bottom diagram
[15:54:38] <jepler> it shows "ccw inhbit" and "cw inhibit" inputs
[15:54:39] <fenn> gezar: perhaps it would be cooler to use a genetic algorithm self-configuring FPGA array with a set of self-assembling nano-actuators...
[15:55:00] <gezar> BigJohnT: be sure to add a machine override manual button, so you can enable the drive once its at one of those limit conditions and then its up to you to safely move it off that limit, versus you having to physically turn a motor to move it off
[15:55:20] <jepler> (as well as a "enable low" input)
[15:55:51] <gezar> fenn : I have 2 of those
[15:56:00] <fenn> gezar: but would a grex work with a robot arm?
[15:56:07] <BigJohnT> jepler: I know servos have that kind of limits but I'm talking about steppers
[15:56:26] <gezar> fenn: its all about how the gcode is written you know
[15:56:34] <fenn> uh, i guess
[15:56:53] <ALS> BigJohnT:each drive needs a seprate ground (gecko term# 7)
[15:56:58] <gezar> yeah it would be retardely long programs and it wouldnt be fancy at all, but cool factor
[15:57:06] <BigJohnT> gezar: isn't that what the little check box override limits is in axis?
[15:57:19] <fenn> gezar: i was thinking something powered off the usb bus
[15:57:39] <cradek> BigJohnT: you are not being clear whether you're talking about the limit switches influencing the hardware or software
[15:57:47] <fenn> steppers would never work, but pager motors only draw ~30ma stall
[15:57:53] <gezar> BigJohnT: your going to pin 7, how is emc going to overide that?
[15:57:55] <cradek> if they influence the software, you're right there's override limits in emc
[15:58:16] <cradek> if they influence the hardware, nothing emc does can move the machine, and that's exactly the point
[15:58:57] <gezar> softlimits should be positioned so that at max velocity, the soft limit is hit, then any continued drift or drive of the axis stops before the hard limit, before the hard crash occours
[15:58:59] <BigJohnT> cradek: that's what I'm confused about, one says wire the limit switches to the drive but if you share the home switch the limits are useless and you can't wire to the drive if you home from the limits
[15:59:00] <cradek> with steppers many people are happy enough with wiring the limit switches to emc. you may or may not choose to do it that way
[15:59:12] <jepler> seems like with a few gates you can force DIR to be CW or CCW depending if LIM1 or LIM2 is asserted, e.g., (DIR and not LIM1) or LIM2. but then emc loses position if you press the "jog further onto limit" key, since the motor actually moves a different direction
[15:59:17] <fenn> what if you had a relay that overrides manual limits
[15:59:30] <cradek> BigJohnT: all those things are true. you have to pick your poison.
[15:59:42] <BigJohnT> ok, that makes sense
[15:59:43] <jepler> (but it's no bigger a problem than trying to jog the axis while the stepper "enable" line is low)
[15:59:46] <cradek> if you have separate home and limit switches, you can have the best of all worlds
[16:00:31] <fenn> * fenn is just being a pest
[16:00:38] <BigJohnT> in my case I went with combinded limit home as I had not thought it out to the end.
[16:01:03] <cradek> BigJohnT: then you cannot home if you wire it to the gecko disables, so your poison is picked
[16:01:06] <gezar> the gig should be like this, home slow, home, limit software, limit switch, ball nut v. bearing block
[16:01:22] <BigJohnT> http://i47.photobucket.com/albums/f163/johnplctech/Plasma%20Cutter/LimitSwitch.jpg
[16:01:41] <gezar> in the case of home slow, this doesnt exist
[16:02:18] <fenn> "home slow" varies depending on machine inertia
[16:02:19] <BigJohnT> gezar: wish it did
[16:02:53] <ALS> http://i47.photobucket.com/albums/f163/johnplctech/Plasma%20Cutter/LimitSwitch.jpg
[16:02:58] <ALS> sorry
[16:03:15] <BigJohnT> anyhow thanks for hashing that out, I have a much clearer understanding of homing vs limit switches
[16:03:31] <BigJohnT> * ALS gives me double billing
[16:03:34] <ALS> BigJohnT: mount two more switchs
[16:04:49] <fenn> BigJohnT: you could have a rod that goes through an o-ring to push the switch, and that keeps dirt out of the "gearbox"
[16:05:03] <BigJohnT> ALS: for limits or...
[16:05:12] <ALS> yes
[16:05:19] <BigJohnT> fenn: good idea
[16:05:38] <gezar> BigJohnT: you know you only need to add 3 more limit switches behind your home switches, and tie them into your drives with the other 3, that way, home goes to emc, then your phycial limits go to the overtravel release button (nc)--pin 7 of each drive, have them shut all drives down
[16:06:09] <gezar> does pin 7 go high to disable?
[16:06:17] <ALS> ground
[16:06:47] <gezar> so its high till low then drives are down?
[16:07:26] <BigJohnT> gezar: 3 more switches for each axis
[16:07:28] <ALS> it pulls motor windings to zero
[16:09:09] <SWPadnos> I think you need to drive disable high to actually disable the G203V
[16:09:28] <SWPadnos> disable, step, and dir are all optoisolated, with a common ground
[16:09:41] <SWPadnos> that tells me you have to put current into the inputs to activate them
[16:09:42] <gezar> BigJohnT: yeah, X+ot--------screw stuff or whatever-------------xhome---x-limit
[16:10:45] <gezar> home switches are ignored unless homming right?
[16:11:05] <SWPadnos> should be, unless they're also limit switches
[16:12:04] <ALS> TERM. 7) DISABLE Connect the DISABLE line to this terminal. Do not use this terminal if DISABLE is not used.
[16:12:25] <ALS> from 203v doc
[16:12:57] <SWPadnos> The STEP, DIRECTION and DISABLE inputs are opto-isolated. All three inputs work with 2.5V, 3.3V or 5V logic drive signals. The input drive current is now 2.5mA at 2.5V so almost all logic family (74LS, 74HC, etc.) can be used to drive these inputs. The COMMON return for the signals is controller ground referenced instead of +5VDC. This greatly eases the drive to controller interface.
[16:13:04] <SWPadnos> from 203v doc
[16:13:35] <ALS> gecko 203v
[16:14:00] <SWPadnos> yes, of course
[16:14:13] <ALS> he dosn't you cant use it
[16:14:17] <SWPadnos> that paragraph is more or less repeated just under the TERM 7-10 descriptions
[16:14:22] <SWPadnos> ?
[16:14:52] <SWPadnos> from that paragraph: "These 3 inputs are optically isolated from the rest of the drive. They will operate with 2.5V, 3.3V or 5V logic outputs with 2.5mA minimum source drive current."
[16:15:25] <SWPadnos> "source drive" means the output needs to go high so it can source current (versus sinking, which a grounding output would do)
[16:16:58] <ALS> I have 210s and they say ground this term #7 to diable drive
[16:17:17] <gezar> so he runs all his limit switches +5v, then runs all those into a nc switch then into pin 7, when one switch trips, it sends 5v through the switch into pin 7 of all drives disabling movement, then when he is ready, he can hold the button in, get his drives back move the machine off the offending switch
[16:17:54] <BigJohnT> gezar: that makes sense
[16:18:29] <BigJohnT> will that also go to an input for emc?
[16:19:05] <ALS> Shorting this input to ground (term. 7 to 12) forces winding currents to zero and stops all output switching activity. The G210A will
[16:19:05] <ALS> continue totalizing step and direction inputs if any are sent. The power supply current drops to less than 15 ma. The motor will
[16:19:05] <ALS> return to its original position when the disable input is released if no step pulses have been sent and the motor has not been
[16:19:06] <ALS> moved more than 2 full steps
[16:19:36] <gezar> BigJohnT: but you cant do that with your home switches too, limit is seperate and hardware driven, home goes to emc, you could probably send one signal back to emc saying there is an ot issue but you dont need all 6 inputs, keeping in mind that home still has its 3, so you would have 4 inputs, 3 for homming 1 for ot condition
[16:19:59] <BigJohnT> ok
[16:20:21] <gezar> but you need 6 ot switches, 1 at each end of each axis
[16:20:41] <gezar> and then find out the high low stuff that ALS is working on
[16:20:51] <ALS> the 203v gecko doc isn't very clear on this
[16:22:53] <SWPadnos> the G210 and G203 are different
[16:23:00] <ALS> yes
[16:24:05] <SWPadnos> several people complained about that change on the geckodrive yahoo group :)
[16:24:10] <gezar> wow, its raining very hard
[16:24:19] <SWPadnos> funny - it's 55 degrees here
[16:24:27] <SWPadnos> it was -10 a few days ago
[16:24:51] <SWPadnos> heh - now we have a flood watch
[16:24:56] <ALS> he change the way term #7 is delt with?
[16:25:00] <BigJohnT> I bet they didn't complain about the speed of the 203v...
[16:25:03] <gezar> 1 dead in arkansas so far
[16:25:34] <SWPadnos> ALS: yes, I believe so. the disable input isn't optoisolated on the G210, but it is on the 203
[16:26:03] <SWPadnos> BigJohnT, nobody (and I mean exactly zero people) has had an operational problem with the G203V
[16:26:17] <SWPadnos> the only problems people have had were repairable by replacing the fuse
[16:26:48] <SWPadnos> and were always caused by doing something stupid, like wiring +80V to the motor output\s or something
[16:26:59] <SWPadnos> or powering it backwards ...
[16:27:18] <BigJohnT> SWPadons: nor have I and I have 3
[16:27:36] <SWPadnos> they're almost good enough to get me to use a stepper (but not quite :) )
[16:27:54] <BigJohnT> the instructions are very clear on what will blow the fuse LOL
[16:28:15] <SWPadnos> heh - connect to rectified AC line, drop in bucket of water while running, etc ;)
[16:28:39] <BigJohnT> that was on page 5
[16:28:59] <SWPadnos> I remember Mariss talking about doing that while developing the drive
[16:29:28] <gezar> is hydrogen going to be the answer to this fuel stuff, gm is going to roll out a cadi with it
[16:29:35] <SWPadnos> no
[16:30:24] <jepler> you have to figure out where to get the hydrogen from.
[16:30:29] <jepler> maybe we can do it by burning more coal
[16:30:44] <gezar> the answer lies more in how much freedom of travel were going to have to give up i guess for now
[16:31:01] <SWPadnos> heh - that's the "funny" part about the whole "$2 billion to research hydrogen" - it's all supposed to come from oil or natural gas
[16:31:25] <jepler> the answer was Mr. Fusion, but unfortunately the timeline changes that took place during the three Back to the Future movies made its eventual invention never happen.
[16:31:28] <SWPadnos> plus the money to finance that is fake, financed by inflation rather than taxes
[16:31:59] <SWPadnos> damn. I was just about to announce Mr. Fusion. I guess it'll disappear off my shelf - hey, wait, where did that go?
[16:32:36] <jepler> er, "the answer were going to has been"
[16:32:47] <jepler> damn time travel verb tenses
[16:32:49] <SWPadnos> of course it was/is/should be
[16:32:51] <gezar> just wanted to think about that for a second,
[16:32:55] <SWPadnos> too late
[16:34:38] <gezar> and I dont know anything about g203
[16:34:39] <fenn> solar power satellites
[16:35:22] <gezar> when is space travel going to become something like louis, clark and some chick to keep them warm?
[16:35:40] <fenn> never?
[16:35:50] <BigJohnT> gezar: the g203 has much faster timing for step and direction
[16:36:02] <ALS> flux cap.?
[16:36:08] <fenn> i mean, you arent going to find any hot alien chicks on mars..
[16:36:36] <fenn> (unless tesla/hodowanec were right)
[16:36:44] <gezar> I mean, when is space travel going to be the risk it should be, instead of the omg we must do it perfectly crap we have now?
[16:37:03] <fenn> ah, well, that's happening right now
[16:37:12] <gezar> the whole energy/flight/space issues are going to come of age, once someone figures out what gravity is
[16:37:42] <gezar> 30 years of dark mater has gotten us nowhere
[16:37:45] <fenn> in the private sector, x-cor, scaled composites, etc
[16:38:17] <fenn> nuclear cargo rockets would go a long way towards practical space development
[16:38:56] <gezar> fenn yeah your right, the government got its fingers into space travel and its been much like public transportantion
[16:39:25] <fenn> gezar: even with an artificial gravity device, if energy is conserved you would still need a crapload of fuel (or a nuclear reactor) to get to orbit
[16:39:34] <gezar> i did read 2 weeks ago that the Big dig project is finally finished
[16:40:06] <BigJohnT> now they can spend some billions on New Orleans
[16:40:06] <gezar> fenn its not so much anti or artificial gravity, its knowing what gravity is instead of what we think it is
[16:40:49] <gezar> new orleans should be a test bed for munitions for a few years, then given back to nature
[16:40:56] <fenn> gezar: unfortunately that's not how science works.. you never "know" anything, only disprove theories
[16:41:22] <BigJohnT> just pull the plug and it will fill up
[16:41:31] <gezar> the indians told the french it floods
[16:41:41] <fenn> of course it floods, it's below sea level!
[16:41:53] <SWPadnos> this is how we pay for space travel (and rebuilding N.O., and public transportation ...)
http://www.biblebelievers.org.au/jekyll.htm
[16:42:13] <SWPadnos> once you understand that (and a lot of other stuff around it), you get a different perspective on money and government
[16:42:25] <BigJohnT> it is surrounded by water on all sides when the bonne terre spillway is open
[16:42:38] <SWPadnos> (and no, I'm not a bible thumper - that site just happens to have interesting information on it ;) )
[16:42:58] <fenn> SWPadnos: actually... space travel is financed from income taxes. war bonds are another story
[16:43:29] <SWPadnos> could be, but the federal budget is so mixed up, it's hard to know which dollar is used for what
[16:45:00] <fenn> i like this page (courtesy james alba @ nist) if you are bored
http://peoplescapitalism.org/
[16:45:40] <fenn> er.. albus
[16:46:08] <SWPadnos> hmmm. it's probably warm enough for me to go out into the garage today
[16:46:10] <SWPadnos> yay!
[16:46:26] <fenn> time to throw stuff in boxes?
[16:46:36] <fenn> i mean, "organize"
[16:46:37] <SWPadnos> and then put motor mounts on the BP
[16:46:48] <SWPadnos> I may have to go get more boxes some day :)
[16:50:49] <fenn> that biblebelievers page uses a lot of negative emotional language
[16:51:19] <skunkwork_> heh
[16:51:32] <fenn> "the federal reserve makes money and you can't - so we should abolish it!!!1"
[16:52:27] <SWPadnos> yes. the book that stuff comes from has excellent information, but I don't really like the presentation
[16:52:48] <SWPadnos> he talks about "the nasty awful socialists who want to take over the world"
[16:52:58] <SWPadnos> when he could have just said "a bunch of assholes"
[16:53:20] <fenn> it just makes it hard to follow the logic, that's all
[16:53:29] <fenn> (which i think is the point)
[16:53:47] <SWPadnos> no, the logic is good
[16:53:47] <skunkwork_> so - where could I get a bunch of socket new 478 motherboards?
[16:53:58] <skunkwork_> *new socket 478 motherboards
[16:54:08] <SWPadnos> it's just not presented in a linear fashion :)
[16:54:12] <SWPadnos> newegg?
[16:55:37] <jepler> huh a bit to my surprise they do have a few
http://www.newegg.com/Product/ProductList.aspx?Submit=ENE&N=2010200280+1070509907&Subcategory=280
[16:56:00] <gezar> see what tigerdirect charges as well jepler
[16:56:18] <fenn> skunkwork_: why socket 478?
[16:56:26] <skunkwork_> tigerdirect doesn't seem to have them
[16:56:39] <skunkwork_> because I have about 5 processors that need a home.
[16:57:00] <skunkwork_> (some ecs motherboards with expanding capasitors)
[16:57:17] <skunkwork_> jepler: thanks
[16:57:18] <fenn> um.. why bother?
[16:57:37] <jepler> I guess 478 is newer than I was thinking -- I must have had it confused with 360.
[16:57:48] <jepler> these folks also have some 478s:
http://www.geeks.com/products_sc.asp?cat=469
[16:57:49] <skunkwork_> pentium 4's?
[16:57:59] <skunkwork_> they work ok for workstations.
[16:59:03] <SWPadnos> isn't S478 the P3?
[17:01:35] <SWPadnos> oh - I guess not. shows what I know about Intel CPUs
[17:01:41] <jepler> according to wikipedia, S360 was P3, S423 and S478 were P4 --
http://en.wikipedia.org/wiki/List_of_CPU_sockets#Intel_Sockets
[17:03:35] <gezar> hey, I think it may have lightened up enough for me to go get my books and repair parts for the machine i get to fix tommrow
[17:06:08] <skunkwork_> jepler: thanks again.. geeks sells a asus for $49
[17:07:43] <jepler> hm the asus I see in that list is $59 and refurb .. (Asus P4SD i865PE Socket 478 mATX MB w/VID SND & LAN )
[17:08:04] <skunkwork_> yes... I must have rounded down..
[17:08:20] <SWPadnos> what kind of CPUs are these?
[17:08:55] <SWPadnos> presumably you also have the memory and everything else that makes up a computer too - ie, just replacing the motherboards
[17:09:12] <skunkwork_> I have 4 processors that came out of some ecs motherboards with leaking caps. in the 1.8ghz range
[17:10:08] <SWPadnos> ok. if you have everything else needed (like non-RAMBUS memory), then it may be worthwhile to build computers around the chips
[17:10:17] <skunkwork_> anyone had luck with biostar motherboards? I have maybe only 2 or so.
[17:10:21] <SWPadnos> if not, you're only saving $25 or so by using the used CPUs :)
[17:10:28] <skunkwork_> heh
[17:11:01] <skunkwork_> yah - these will be direct replacements
[17:12:07] <SWPadnos> they're not RAMBUS systems, are they?
[17:12:11] <skunkwork_> no
[17:12:12] <SWPadnos> (just making sure ;) )
[17:12:18] <skunkwork_> ddr
[17:56:37] <maddash> jepler: now that keystick works without the xterm delay, there's no reason to force xterm usage
[17:56:40] <maddash> jepler:
http://pastebin.ca/846945
[17:58:11] <maddash> keystick works fine in rxvt
[17:58:25] <maddash> for instance
[18:55:12] <SWPadnos> wow. 60 degrees, a record
[18:56:51] <maddash> arghhhhhhhhhh
[18:56:58] <maddash> thar be global warmin'!
[18:57:02] <SWPadnos> don't tell me you deleted a lot of work again
[18:57:06] <SWPadnos> oh, phew :)
[18:58:10] <fenn> thank heavens
[18:59:45] <fenn> maddash: what does xterm have to do with a delay?
[18:59:55] <jepler> maddash: if you prefer a different terminal emulator, then write a script that invokes keystick in it, and set that as your DISPLAY. Or unset DISPLAY and run the emc script there -- if DISPLAY is unset, it doesn't try to invoke xterm to run keystick inside.
[19:00:18] <jepler> maddash: I am resistant to special-casing keystick to also search for a terminal emulator to run. I'd rather see less "gui-specific" code in scripts/emc
[19:00:59] <jepler> huh I thought debian had something called 'sensible-terminal' to go with -editor, -pager, -mda, and -browser, but I must have imagined it :(
[19:01:05] <SWPadnos> that code is there in case EMC is run from an icon, right (ie, the user didn't use a terminal to start EMC)
[19:01:40] <SWPadnos> http://people.debian.org/~kubota/sensible-xtermemu.html
[19:01:42] <SWPadnos> ?
[19:01:53] <jepler> SWPadnos: I think there are two reasons. That's one. The second is that any debug messages printed by e.g., task would disturb keystick .. so even if there's already a terminal to run in, you're "better off" running it in a different terminal
[19:02:01] <SWPadnos> ah, ok
[19:02:02] <maddash> jepler: er, if you're resistant to 'special-casing', then why do you specifically launch xterm?
[19:02:16] <SWPadnos> because it's known to exist on an X system ??
[19:02:24] <maddash> jepler: you realize that right now, running keystick in my VT does not work, right?
[19:02:41] <maddash> jepler: simple question: what if xterm is not installed?
[19:02:44] <SWPadnos> how would he know that>
[19:02:46] <SWPadnos> ?
[19:03:03] <SWPadnos> can you get X without xterm, without removing it manually?
[19:03:19] <maddash> SWPadnos: by knowing that emc.in specifically launches xterm when DISPLAY is set
[19:03:35] <SWPadnos> no, I'm wondering how he would know that it doesn't work in your VT
[19:03:43] <maddash> SWPadnos: not everyone uses xterm; having it inside emc.in is stupid
[19:04:14] <maddash> SWPadnos: no, no, "inside VT" Means executing "scripts/emc.in configs/sim/keystick.ini" inside rxvt does nt work
[19:04:18] <SWPadnos> one sec - is there a way, without manually removing xterm, to have a functional X system that does not also have xterm?
[19:04:32] <SWPadnos> emc.in is not the script
[19:04:39] <jepler> SWPadnos: yes, "xterm" is a package that is separate from the rest of X.
[19:04:41] <SWPadnos> you have to make after changing that
[19:04:46] <maddash> SWPadnos: er, yes
[19:04:46] <SWPadnos> jepler, ok, thanks
[19:05:42] <maddash> jepler: with my patch, I can run keystick inside the VT that launched it, regardless of whether the VT Is xterm, rxvt, gnome-terminal, etc tc
[19:05:48] <SWPadnos> well, I think I'll bow out of this duscussion, and maybe even make a shim plate so I can attach some motor drives to my mill. bbl
[19:05:51] <maddash> s/I/we/g
[19:05:52] <fenn> /usr/bin/x-terminal-emulator?
[19:06:15] <cradek> I don't know if assuming debianisms is better or worse than assuming the existence of xterm
[19:06:21] <jepler> maddash: I use urxvt as my normal terminal emulator. with the latest emc script from TRUNK, keystick runs in that terminal window when I invoke it with DISPLAY unset
[19:06:26] <maddash> fenn: no, no, my point is to wipe out the terminal command prefix in '[terminal command] [keystick args]' inside emc.in entirely
[19:06:58] <jepler> that makes keystick not work for people who launch emc from an icon, not from a terminal.
[19:07:15] <maddash> jepler: right. so you'd always have to manually unset DISPLAY. which is highly extraneous
[19:07:26] <maddash> er, what icon?
[19:07:56] <jepler> here's another option: ln -s keystick keystick-jeplerhatesmehewontmakethechangesiwant and then list *that* as your [DISPLAY]DISPLAY. You won't get the special case for keystick.
[19:07:57] <maddash> I see your point
[19:08:48] <maddash> what special case? did you look at my patch?
[19:09:06] <maddash> having 'xterm' in your emc.in -- THAT is having a special case
[19:09:47] <maddash> hold on
[19:10:25] <jepler> I think we're having a failure to communicate here.
[19:10:38] <gezar> well im back, I got 3 geko drives worth of books, yes they were used books too
[19:12:16] <jepler> There are two observed problems that prompted the 'special case' of keystick in scripts/emc: First, launching from an icon, it would appear not to work at all. Second, when launching from a terminal, keystick would be disturbed by "other messages" e.g., debug messages from task. Both of these situations are improved by adding a terminal (and xterm is as good a guess at 'an installed terminal emulator' as anything)
[19:12:19] <maddash> fenn: x-term-emu is a good idea, but what if we're on a non-debian system?
[19:12:51] <fenn> maddash: dunno, hard to do anything if you dont make any assumptions
[19:12:55] <maddash> yes, I see the need to fork a VT
[19:12:59] <cradek> also keystick is picky about its terminal settings (F keys, home/end, etc)
[19:13:18] <maddash> I thought it uses ncurses?
[19:13:18] <cradek> it would not be surprising if xterm works but other terminal emulators don't
[19:13:41] <maddash> you know what else would be surprising? if you add xterm to your dependencies
[19:13:48] <fenn> it would be nice if keystick suppressed 'other messages' but i dont know anything about ncurses
[19:14:14] <fenn> and bc
[19:14:25] <cradek> the very small number of people interested in keystick can easily make that simple script do whatever they want
[19:14:30] <cradek> I don't see the issue really
[19:14:45] <cradek> mostly I think we all like to argue
[19:14:58] <jepler> no actually I don't enjoy it as much as I end up doing it
[19:15:05] <jepler> argh see?
[19:15:30] <maddash> so are you two telling me that you don't see the ugliness of that xterm line?
[19:15:38] <fenn> i could say "i agree" but the information content is low
[19:16:06] <fenn> so most of the time people only feel compelled to say something if they disagree and have a reason
[19:16:33] <maddash> "the small number of people interested in keystick" can attach their "icon" to a script that launches keystick in their own VT
[19:16:49] <maddash> it's pointless and clunky to try to launch a VT for the user
[19:17:02] <fenn> maddash: keystick is in the config picker tree, it's not hard to launch it from an icon
[19:17:14] <jepler> if I make that change, I get a bug report: sample configuration configs/sim/keystick.ini doesn't work when launched from the Application menu.
[19:18:05] <maddash> geez, at the very least, replace 'xterm' with a variable containing the name of the VT of choice
[19:18:55] <jepler> I don't believe there's a cross-distro way to specify that. Do you want the debianism that fenn suggested?
[19:19:11] <maddash> no, just a var that defaults to x-terminal-emulator
[19:19:26] <maddash> or maybe a 'configure' option
[19:19:38] <fenn> $X_TERMINAL_EMULATOR
[19:19:40] <gezar> i guess the only way to run the computer tester is from the live cd?
[19:20:03] <maddash> e.g., ./configure --enable-simulator --VT-path=/usr/bin/voodoo-term
[19:20:23] <jepler> * jepler kills himself
[19:20:25] <jepler> problem solved
[19:20:51] <fenn> maddash: maybe you should write a long angry letter to the linux standards base
[19:20:53] <ALS> we will haunt U
[19:21:29] <gezar> maddash you doing all this to squeeze out more performance from teh parallel port?
[19:22:08] <gezar> i havent caught up with what you have going on is all. but it seems interesting
[19:22:35] <maddash> http://pastebin.ca/847045
[19:23:38] <maddash> jepler: that was my new patch, in case you need it
[19:24:18] <maddash> gezar: sadly, simple mods to emc.in won't speed up my parport
[19:24:53] <gezar> maddash: is that what your after though?
[19:25:53] <maddash> gezar: it was. then I saw the futility, because jmkasunich's code seemed pretty optimized already
[19:26:29] <gezar> yeah its pretty much a machine limitation, you considered a i/o card instead?
[19:27:29] <maddash> 'i/o card'? I'm already using two PCI parports + the onboard
[19:28:01] <gezar> servo to go, motentec(spoelling is off)
[19:28:19] <gezar> a non parallel type i/o card
[19:29:32] <maddash> actually, I'm planning an AVR external stepgen
[19:29:51] <gezar> avr =?
[19:30:09] <maddash> atmel avr microcontroller
[19:32:55] <bill2or3> have you looked at the usb bitwhacker? if that'd work you'd save yourself some development time.
[19:33:28] <archivist> allow for multiple external avr that can synchonise with each other, will/should remove most/all realtime issues in pc
[19:34:57] <maddash> bbl
[19:41:51] <fenn> bill2or3: ftdi usb to rs232 is the usual way to do it
[19:42:04] <fenn> ftdi is a chip company btw
[19:42:32] <fenn> http://www.ftdichip.com/FTProducts.htm
[19:42:38] <bill2or3> what breaks the serial out into seperate pins?
[19:42:54] <fenn> the avr on the receiving end
[19:43:04] <bill2or3> I've seen the ftdi usb chips.
[19:43:30] <bill2or3> ahh, the usb bitwhacker is a usb interface to a dozen'ish addressable pins.
[19:43:39] <bill2or3> that's probably not enough pins anyway.
[19:45:01] <fenn> usb is not realtimey enough anyway
[19:45:28] <fenn> unless you have some smarts at the end of the cable, and are doing open loop stepping
[19:46:03] <archivist> put the loop in external avr's
[19:46:04] <bill2or3> gotcha.
[19:46:27] <bill2or3> I've been making a plotter (of sorts), and suffering all kinds of stepper-driving frustrations.
[19:46:36] <fenn> before you know it you're making a g-rex clone
[19:46:48] <fenn> (not that that's a bad thing)
[19:47:14] <bill2or3> except I'd be making a bad clone.
[19:47:15] <bill2or3> heh
[19:48:16] <anonimasu> yeah
[19:48:22] <anonimasu> that's right..
[19:48:23] <anonimasu> :p
[19:48:57] <anonimasu> what's so wrong with emc that everyone needs to reinvent their own?
[19:49:09] <fenn> lack of i/o
[19:49:16] <fenn> in PC's
[19:50:06] <anonimasu> time = $ so why spend time developing your own thing instead of just buying a card to do it?
[19:50:26] <fenn> why contribute to emc? why do anything at all?
[19:50:34] <gezar> same reason I didnt buy everthing when I had the money
[19:50:45] <fenn> i'd be better off murdering rich people and stealing their money no?
[19:51:09] <gezar> fears is my isses ide hate to spend a grand on a good card, only to screw up and blow it out
[19:51:35] <anonimasu> fenn: the contributing to emc was the whole point of where I were getting at.
[19:52:00] <gezar> ill be contributing to emc very soon :)
[19:52:01] <anonimasu> fenn: why not improve something already made instead of reinventing it?
[19:52:16] <fenn> anonimasu: developing your own hardware contributes to the pool of free hardware designs
[19:52:37] <fenn> there isn't enough open hardware out there
[19:52:42] <gezar> i gots mad machining skillz
[19:52:43] <anonimasu> fenn: yeah we've seen lots of good opensource stepper drivers..
[19:52:49] <fenn> anonimasu: oh yeah? where
[19:53:10] <gezar> I built my own stepper driver
[19:53:18] <anonimasu> fenn: nowhere..
[19:53:34] <fenn> was that sarcasm?
[19:53:40] <anonimasu> yes
[19:53:42] <gezar> in fact the chips I use were free, and the schematics on how to roughly use them were with the chips pdf
[19:53:59] <anonimasu> gezar: allegro?
[19:54:02] <gezar> yep
[19:54:04] <anonimasu> -_-
[19:54:18] <fenn> anonimasu: so.. uh. yeah. nevermind.
[19:54:19] <gezar> the ucn8054b, discontinued now, and the replacements are wicked sick
[19:54:26] <anonimasu> how do they perform if you compare to geckos?
[19:54:33] <gezar> they suck
[19:54:38] <anonimasu> that was the point :/
[19:54:42] <ALS> gezar: could you ramp them up to run say nema42 motors
[19:54:43] <gezar> I dont have a gecko but the limit is the voltage
[19:54:47] <fenn> * fenn could care less about steppers
[19:55:06] <anonimasu> yep, but it's a good analogy..
[19:55:12] <gezar> ALS: there you get limited by voltage and amperage, the new ones do 3A but still 35v or mabye its 50v now
[19:55:38] <fenn> * fenn cowers in fear
[19:55:42] <anonimasu> fenn: there's been lots of work at it, and no really good successful design I've seen(maybe pminmo)
[19:55:54] <gezar> but for 6 bucks a chip, I dont think you can more easly make a bipolar stepper whirl like hell
[19:56:57] <gezar> home brew that is, you start talking about real machines, with some iron in them, yeah, your going to want to spend the money to do it the right way
[19:57:01] <anonimasu> like a mesa 7i43-u(89$)
[19:57:22] <anonimasu> I dont think that's bad for 48 io.. :)
[19:57:32] <gezar> hell no its not, pci?
[19:57:47] <anonimasu> usb/epp
[19:57:58] <gezar> oh
[19:58:06] <anonimasu> if you want pci it goes up to 299$
[19:58:10] <anonimasu> no wait..
[19:58:15] <fenn> $199
[19:58:20] <anonimasu> 199
[19:58:26] <anonimasu> 72 io bits..
[19:58:33] <gezar> but really you guys, there are right and wrong ways for all our machining needs, its all a matter of what we want to get out of them and at what cost
[19:58:47] <fenn> parport card is only $5-15 though
[19:59:07] <archivist> cant get one here though at local pc store
[19:59:11] <anonimasu> yeah
[19:59:13] <gezar> on that 199 card, what is max freq generation?
[19:59:45] <archivist> parport cards seem to be dissappearing
[19:59:48] <skunkwork_> there isn't a step gen for the mesa card yet..
[19:59:56] <skunkwork_> for emc2
[19:59:59] <gezar> and on top of that, do you want or need that sort of speed?
[20:00:02] <skunkwork_> it is in the works..
[20:00:30] <fenn> unfortunately fpga-based hardware can't be programmed with free software
[20:00:50] <fenn> which is part of why i'm pursuing the microcontroller route
[20:00:57] <gezar> thats what it all boils down to, how much i/o do you need and how fast do you want to go
[20:01:11] <gezar> fenn: like the Grex?
[20:01:15] <fenn> no
[20:01:32] <fenn> performing the same functions as the fpga-based solutions
[20:01:39] <gezar> your talking about sending code out to little black box, and the black box does the work?
[20:01:54] <fenn> step generation, quadrature decoding, tons of i/o, pwm, adc
[20:02:13] <ALS> can she cook?
[20:02:15] <fenn> it's not a g-code interpreter, doesn't do PID
[20:02:20] <jepler> gezar: "hardware" (fpga) step generation easily surpasses 10MHz
[20:02:43] <fenn> (not that you'll find a stepper driver that can make use of 10MHz step rate)
[20:02:43] <jepler> from the emc servo thread, you send frequency commands to the fpga and retrieve position feedback
[20:02:53] <jepler> (or, in fenn's project, to the microcontroller)
[20:03:09] <jepler> or microcontroller*s* plural, I guess
[20:03:10] <gezar> so that can in fact be a cost effective solution
[20:03:23] <gezar> fenn something like the pic microcontroler?
[20:03:29] <gezar> but more advanced I guess?
[20:03:31] <fenn> there's one micro that handles communication with the PC
[20:03:43] <fenn> gezar: yes like a PIC but less crappy
[20:03:57] <fenn> not that it matters for the end user really
[20:03:58] <archivist> aw poor pics
[20:04:11] <fenn> actually there are some pic's with hardware quadrature counters built in.. i'm jealous
[20:04:23] <gezar> hey now, I have a pic, its sitting near me, doing exactly what I told it to do, collect dust
[20:04:41] <jepler> har har
[20:04:47] <archivist> we a few clocks with pic chips
[20:04:53] <archivist> we made
[20:05:10] <gezar> i have a bunch of nixie tubes im thinking about doing that with
[20:05:35] <gezar> or a nixie dro
[20:05:49] <fenn> i never really got the nixie tube thing
[20:05:57] <gezar> cool factor
[20:05:57] <archivist> nor me
[20:06:04] <anonimasu> they glow cute
[20:06:05] <gezar> means you tore something really old apart
[20:06:14] <fenn> why not make one out of neon bulbs?
[20:06:40] <fenn> or .. or..
[20:06:50] <fenn> frog legs with electrodes stuck in them
[20:06:57] <gezar> hahahahaahahaha
[20:07:10] <gezar> thats good, but efed up
[20:07:17] <jepler> well obviously you have reliability issues there
[20:07:17] <fenn> a 7-segment high voltage pickle display
[20:07:22] <jepler> ooooh good idea
[20:07:31] <gezar> have them kicking a flip number set?
[20:07:41] <jepler> but what's the time to 50% brightness of a pickle?
[20:08:07] <gezar> how much voltage does that take?
[20:08:16] <fenn> 110V works i think
[20:08:30] <gezar> how many amps?
[20:08:51] <gezar> and what if you have a pickle blow like a fuse?
[20:09:25] <gezar> sigh, okay enough I guess
[20:09:30] <fenn> google tells me a pickle is a high power device
[20:09:38] <jepler> http://isaac.exploratorium.edu/~pauld/activities/aaptelectric/glowingpickle.html hm sounds like it takes awhile to start glowing
[20:09:56] <jepler> "Wait a few minutes. Notice the pickle begins to steam. Then it begins to flash bright yellow at one end."
[20:10:03] <jepler> not ideal for a 7-segment display of time
[20:10:40] <skunkwork_> Guest523: hello
[20:11:18] <Guest523> hello to all
[20:12:09] <fenn> jepler: since it's due to arcing, i think it would turn on instantly once the pickle is conditioned
[20:12:51] <fenn> and you could use a current limited HV supply
[20:13:17] <fenn> .. or some yellow led's
[20:21:31] <gezar> man my shapper is so fast at cuting
[20:21:51] <anonimasu> :)
[20:43:20] <SWPadnos> fenn, you can program FPGAs with free, but not Free software
[20:43:35] <SWPadnos> especially for Xilins, whose tools run natively on Linux
[20:43:38] <SWPadnos> Xilinx
[20:43:42] <fenn> my shift key must have slipped
[20:43:54] <fenn> where's the code?
http://www.atmel.com/dyn/resources/prod_documents/doc2506.pdf
[20:45:18] <SWPadnos> http://www.atmel.com/dyn/resources/prod_documents/AVR325.zip
[20:45:48] <SWPadnos> this page lists all or most of the appnotes and source archives for AVRs:
http://www.atmel.com/dyn/products/app_notes.asp?family_id=607
[20:46:57] <fenn> i see. thanks
[20:47:03] <SWPadnos> sure
[20:50:21] <SWPadnos> weird - there are only ~100 cycles in that interrupt routine, for the worst-case path. I don't see why they'd be limited to 60 kbits/sec, even with a 4 MHz chip
[20:50:28] <jepler> I notice that their implementation doesn't use nAddrStr (so you can't do address cycles in your EPP protocol)
[20:50:36] <SWPadnos> it should be closer to 100 kbits (though that doesn't leave mnuch for the foreground)
[20:51:53] <SWPadnos> err -kbytes
[20:52:35] <JymmmEMC> * JymmmEMC read that as: fenn: my shit key must have slipped
[20:52:51] <SWPadnos> use a 20 Mz chip instead (closer to the speed you'd want if you're using hardware PWM), and you could get some good data rated
[20:52:53] <SWPadnos> rates
[20:53:34] <fenn> yep gonna use atmega48
[20:54:55] <SWPadnos> hmmm. I wonder if this PC can handle Altium, TurboCAD, OpenOffice, and Mozilla+Firefox at the same time
[20:55:24] <fenn> mozilla+firefox?
[20:55:45] <SWPadnos> firefox works better for browsing, but I use mozilla for email
[20:55:49] <SWPadnos> and IRC
[20:57:02] <jepler> you should buy more bagiggabytes
[20:57:16] <fenn> i managed to not install openoffice by using gmail's "view as html" for .doc files
[20:57:23] <SWPadnos> bilbo bagginsbytes?
[20:57:46] <SWPadnos> I use spreadsheets and doc files a lot, so OO is a good thing for me
[20:57:51] <SWPadnos> they're not all emailed to me
[20:58:59] <jepler> "[T]he first processor architected specifically for 21st century applications that require both performance and low power consumption."
[20:59:33] <fenn> eeee
[21:00:23] <cradek> dang, someone should have thought of that before now!
[21:00:25] <SWPadnos> wow - lucky me
[21:00:47] <skunkwork_> mozilla will not work if you have 130586 messages in the inbox..
[21:00:50] <SWPadnos> for the review I did of turboCAD/CAM, I created a NEMA-34 to NEMA-42 adapter.
[21:00:56] <skunkwork_> on the pc anyways
[21:00:58] <SWPadnos> as it happens, I need to make two of those now :)
[21:03:00] <archivist> * archivist listens to amusing noises from his steppers. 3D_Chips.ngc
[21:04:06] <cradek> if you have four, you can run daisy
[21:04:12] <skunkwork_> archivist: isn't it fun :)
[21:06:16] <archivist> only wired 3 so far.. another level shifter to drive the 4th drive needed
[21:06:34] <fenn> can just fake one
[21:07:05] <fenn> there was a speaker driver around somewhere
[21:07:15] <cradek> you can run it with three, but it's not as nice sounding
[21:08:44] <fenn> its certainly better sounding than the formula 1 car singing 'god save the queen'
[21:08:55] <archivist> I tried it but got an error bad chr 'a' used near line 24 in daisy
[21:09:06] <cradek> yeah take the A out
[21:09:40] <cradek> and set your scales or it will be a bit out of tune
[21:09:42] <cradek> "a bit"
[21:16:41] <BigJohnT> hmmm, if I MDI G55 and run a program then run it again I'm back in G54 without me asking... That could be interesting... I know I know that's by design... just not to intuitive and sure to catch someone by suprise...
[21:16:46] <archivist> "a bit" yes
[21:16:59] <BigJohnT> must have typed too much
[21:17:01] <cradek> M2 at the end of your program resets a lot of things. There's a list in the docs.
[21:17:08] <BigJohnT> ok
[21:20:41] <jepler> hm, when the machine is otherwise idle there's sure something going on every 100ms.
http://emergent.unpy.net/files/sandbox/10hz-anomaly.png
[21:20:50] <cradek> http://blog.makezine.com/archive/2008/01/frostbot_a_cnc_robot_for.html
[21:21:30] <jepler> (this graph also shows that one outb() to parport is about 2us -- it's a 933MHz machine)
[21:21:54] <SWPadnos> so it's RT, not sim?
[21:21:57] <jepler> swyes
[21:21:59] <jepler> SWPadnos: yes
[21:22:00] <SWPadnos> ok
[21:22:19] <SWPadnos> what is iobench?
[21:22:42] <SWPadnos> (obviously it's an I/O benchmark, but ...)
[21:22:57] <BigJohnT> If I leave out the M2 I get an error "File ended with no percent sign or program end. If I end with % I get another error
[21:23:37] <BigJohnT> ok I see if you start and end with % you are ok...
[21:24:00] <SWPadnos> if you always want G55 for a program, put the G55 in the program rather than using MDI every time ... :)
[21:24:10] <jepler> SWPadnos: just a little thing I wrote.
http://emergent.unpy.net/files/sandbox/iobench.comp http://emergent.unpy.net/files/sandbox/iobench.hal
[21:24:20] <SWPadnos> ok - looking
[21:24:36] <jepler> it does I/O to a given port a given number of times
[21:24:42] <BigJohnT> ok, just learning about G54, 55 etc and testing
[21:24:56] <jepler> in that graph, it's an outb() to the parport data register 1 and 2 times respectively
[21:25:13] <BigJohnT> to see if I get experiance or what I expected...
[21:25:57] <SWPadnos> heh - I have n oexperience, so definitely take what I say about G-code with a grain of rock salt
[21:26:12] <BigJohnT> so the axis backplot only works with G54?
[21:26:27] <cradek> the axis backplot shows all coordinate system offsets properly
[21:26:46] <BigJohnT> I'm used to conversational so it's kinda strange the way things have to be done
[21:27:00] <cradek> for a good time, load up systems.ngc and play with touch-off
[21:27:19] <BigJohnT> cradek: axis shows the offset correctly
[21:28:38] <BigJohnT> cradek: holy crap 1932 lines of code
[21:32:49] <lerman_> lerman_ is now known as lerman
[21:34:39] <BigJohnT> cradek: I see what it's doing now
[21:36:20] <skunkwork_> running this thing for a few hours - latency test comes out 12468ns
[21:38:10] <BigJohnT> so if you program a G55 in MDI Axis don't know how to backplot it right? but if you program it in the g code Axis knows how to back plot it
[21:39:06] <skunkwork_> if you set g55 in mdi and there isn't a coordinate offset in your program... You can reload the program and it will locate it correctly..
[21:39:29] <BigJohnT> ok
[21:39:31] <cradek> well try it, offset g55
[21:39:38] <cradek> then g54g0x0y0, g55g0x0y0
[21:39:44] <cradek> you'll see it will move
[21:40:07] <cradek> unless I'm not understanding the question
[21:40:45] <BigJohnT> cradek: you understand perfectly and yes it works if I do a g55 then load the program
[21:40:46] <SWPadnos> jepler, I'm updating now, so I can't try this, but you should try making the thread faster, to see if it's a cache effect
[21:41:24] <SWPadnos> 500 ns (or cycles) seems reasonable for some extra cache line fills
[21:41:34] <cradek> but SWPadnos is right that you should put necessary modal gcodes in your program, and not depend on how things are previously set. that's a sure way to get something unexpected
[21:42:20] <BigJohnT> I'm learning that now LOL thanks for the help
[21:42:35] <cradek> sure
[21:45:51] <archivist> heh tort warms the steppers up
[21:47:31] <jepler> SWPadnos: indeed, it must be the hal data kicked out of cache by non-rt code. (if it was code, then it probably would show up as an anomaly for the iobench.0 only)
[21:47:44] <SWPadnos> yep
[21:48:02] <SWPadnos> also, it's interesting that the iobench.0 time is "fuzzier"
[21:48:09] <jepler> indeed
[21:57:30] <jepler> in fact it seems that the 'heartbeat' of halscope is set t 100ms
[21:57:33] <BigJohnT> systems.ngc sounds best at 300IPM really sings
[21:57:37] <jepler> 178: gtk_timeout_add(100, heartbeat, NULL);
[22:06:59] <Gamma-X2> my other tools came today
[22:07:01] <Gamma-X2> indicators etc.
[22:07:42] <Gamma-X2> just wish i had emc up! lol
[22:19:34] <BigJohnT> Gamma-X2 I saw some guys talking about crusaders on practical machinest today. Seems like they know a lot. Do you want me to find the link again?
[22:19:45] <alex_joni> heh.. I sometimes use the term 'lunix' instead of linux
[22:19:55] <alex_joni> didn't know that actually exists :)
[22:20:11] <Gamma-X2> BigJohnT please!
[22:20:15] <BigJohnT> bbr
[22:20:15] <alex_joni> http://lng.sourceforge.net/
[22:20:17] <BigJohnT> brb
[22:22:28] <BigJohnT> http://www.practicalmachinist.com/vb/showthread.php?t=149160
[22:22:35] <BigJohnT> and
[22:23:31] <BigJohnT> http://www.practicalmachinist.com/vb/showthread.php?t=124153
[22:23:56] <BigJohnT> Gamma-X2: the first link is the better on
[22:23:58] <BigJohnT> one
[22:24:47] <Gamma-X2> thanks
[22:25:20] <BigJohnT> you might pm them to see if they can shed some light on your application
[22:26:26] <Gamma-X2> thanks
[22:50:40] <archivist> I hate changing tires between snow showers in the dark
[22:51:11] <archivist> at least I have warm steppers to warm my hands on!
[22:53:53] <eric__u> it's springlike here in the states
[22:54:26] <gezar> eric_u: where you at?
[22:54:36] <archivist> heh its spring like in the UK
[22:54:51] <eric__u> pennsylvania
[22:55:00] <gezar> the cold is comming, after the tornados
[23:01:33] <eric__u> that's what I figure
[23:01:45] <eric__u> we had a tornado last fall, very rare
[23:02:21] <alex_joni> good night guys
[23:02:41] <gezar> night
[23:06:38] <BigJohnT> night alex
[23:14:13] <dmess> hi all
[23:20:05] <gezar> howdy
[23:21:05] <BigJohnT> hi
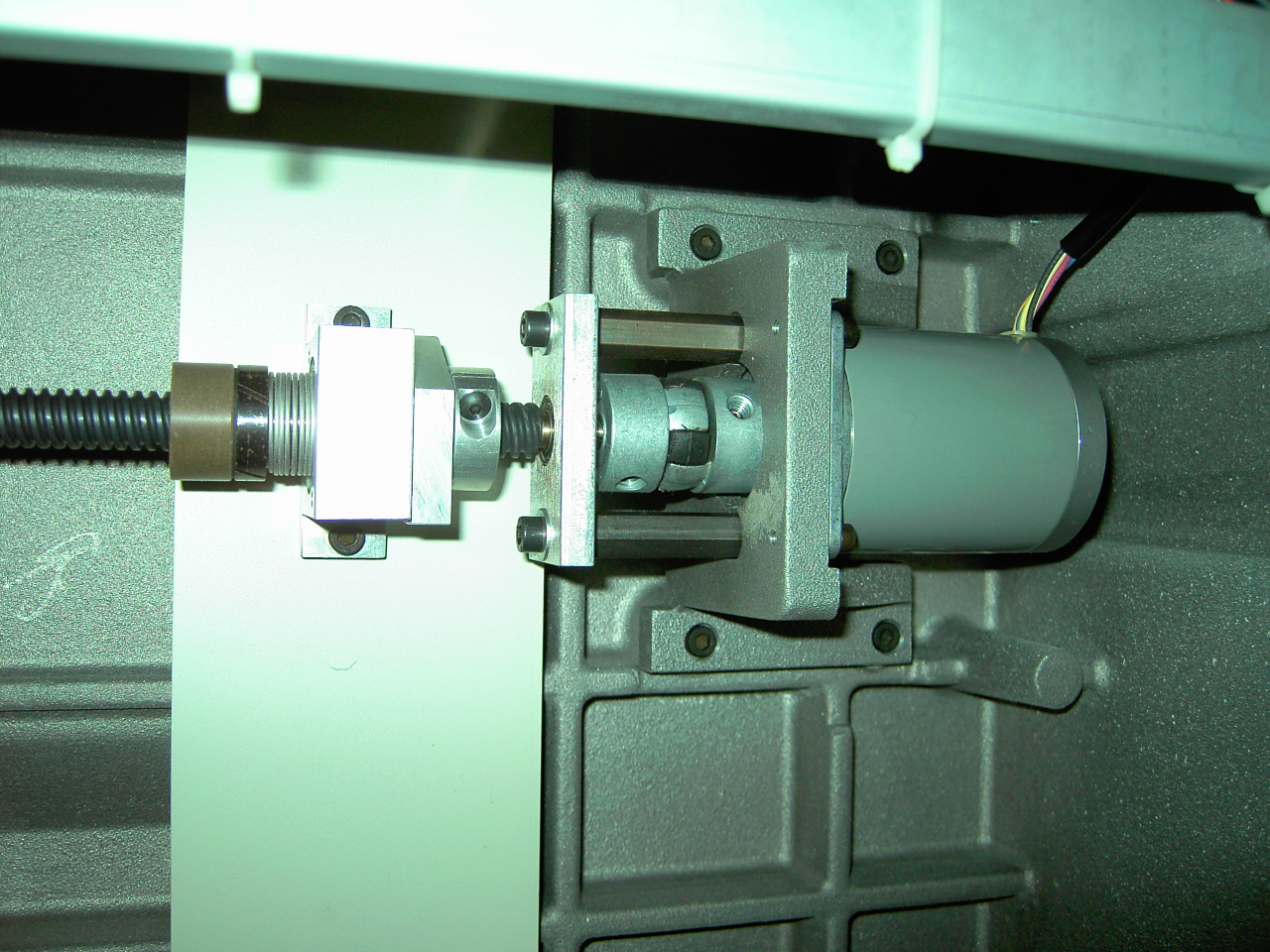{kind=link}
{kind=link}
{kind=link}