Back
[12:44:44] <kwajstabo> hello
[12:44:52] <alex_joni> hi
[12:45:00] <kwajstabo> is it fossible to add some variables in to g code?
[12:45:24] <kwajstabo> like this int lengtx=100 g0 xlengtx
[12:45:43] <kwajstabo> like this: int length=100; g0 xlength
[12:46:45] <alex_joni> kwajstabo: yes, not quite like that
[12:46:48] <jepler> These are called "parameters" and they are referred to by number. e.g., #1=100 / g0 x#1
[12:47:23] <skunkworks> I thought learman had added support for variables. Is that only in head?
[12:47:37] <alex_joni> skunkworks: lerman added support for o-words
[12:47:39] <alex_joni> but that was ages ago
[12:47:45] <skunkworks> no recently
[12:47:58] <skunkworks> I think there was a wiki - let me look
[12:48:13] <jepler> yes there is an alternate syntax which actually has named variables, but it does not work in 2.2
[12:48:16] <jepler> er, it does not work in 2.1
[12:49:09] <alex_joni> that was in dec. 2006 :)
[12:49:12] <alex_joni> http://cia.vc/stats/author/lerman
[12:49:18] <skunkworks> http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?Named_Parameters
[12:50:13] <skunkworks> http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?AlternativeNamedParameterSyntax
[12:50:35] <jepler> oh some days I hate the wiki. "everything on this page is wrong; I left it here because of the bees" -- paraphrase
[12:51:40] <alex_joni> killer bees?
[12:51:50] <jepler> could be, the page doesn't make it clear
[12:52:47] <jepler> here is a nontrivial example which uses emc 2.1 numbered parameters:
http://cvs.linuxcnc.org/cgi-bin/cvsweb.cgi/emc2/nc_files/useful-subroutines.ngc?rev=1.4;content-type=text%2Fplain;only_with_tag=RELEASE_2_1_6
[12:52:58] <kwajstabo> anybody knows how can i write comments into g code (cant find this in pdf)?
[12:53:15] <skunkworks> (like this) ;)
[13:10:45] <alex_joni> kwajstabo: comments are inside '()'
[13:13:53] <alex_joni> kwajstabo: page 133 in my pdf has 13.5 Comments and Messages
[13:14:27] <alex_joni> it's Part III Using emc2, Chapter 13 Language Overview
[14:17:18] <anonimasu> hello
[14:54:51] <jepler> cradek: is it "0805" or "1206" surface mount packages that you can fit a trace under? is the DRC smaller than 10/10 for you to do that?
[14:55:42] <cradek> I think it was 0805 but unfortunately I don't remember the details
[14:56:22] <jepler> it looks like 8/8 would fit under the capacitor package eagle calls "0805K" but 10/10 doesn't.
[14:56:27] <jepler> 1206 works with 10/10
[14:56:49] <cradek> I may have made an 0805 package with slightly smaller pads
[15:28:24] <jepler> do quarters really conduct well enough to make this idea viable?
http://www.makezine.com/blog/archive/2007/06/quick_hack_the_1_ctod_ada.html
[15:28:39] <bill2or3> * bill2or3 looks
[15:29:09] <bill2or3> I don't see why not.
[15:32:06] <archivist> heh mix the coin types and create some thermocouple junctions for increased power (not a lot)
[15:32:07] <SWPadnos> it should work, but a C battery can't supply as much current as a D battery (nor for as long)
[15:33:35] <bill2or3> yay: "Subject: You Won eBay Item: Kuroda Ballscrew Leadscrew"
[15:35:59] <skunkworks> bill2or3: nice
[15:36:09] <The_Ball> is kuroda a known brand?
[15:36:23] <bill2or3> the longer I work on this project, the more I just want to buy parts instead of make them.
[15:36:42] <bill2or3> Ball, no idea, but I'm sure it's better than what I'd have made in my garage.
[15:37:20] <bill2or3> which would have just been a Acme thread + delrin nut deal.
[15:37:27] <The_Ball> hehe, for sure
[15:37:42] <anonimasu> bill2or3: that's what we've been trying to tell most people for 2 years ;)
[15:38:37] <bill2or3> anonimasu, no argument here. I'd have more fun if I could make it myself, but my free time is scarce lately.
[15:38:54] <anonimasu> bill2or3: yep
[15:38:58] <anonimasu> bill2or3: that's the thing, time vs cost..
[15:39:01] <bill2or3> at least until they make baby-sized safety glasses, I'm pretty much stuck in the house.
[15:39:19] <anonimasu> :/
[15:40:13] <anonimasu> err congratulations :)
[15:40:36] <bill2or3> thanks. :-)
[15:45:12] <anonimasu> btw..
[15:45:17] <anonimasu> they make thoose safety glasses..
[15:47:52] <bill2or3> Hmmmmm, I wonder how my wife would feel about that.
[15:57:09] <The_Ball> jepler, is it possible to run the pluto for testing without a realtime kernel?
[15:59:32] <jepler> The_Ball: no
[16:00:47] <jepler> at least it's not possible without rewriting the driver to be a normal linux userspace program
[16:01:23] <The_Ball> ok, i'll use the other machine tomorrow
[16:01:56] <The_Ball> seems the amplification was 14x btw, maybe i put the wrong resistor in, i'll see tomorrow
[16:03:36] <The_Ball> well good night
[17:33:07] <JymmmmEMC> yo ho ho
[17:34:31] <skunkworks> Petev: looks like you submitted a patch.. will try it tonight.
[17:34:57] <skunkworks> JymmmmEMC: Hi
[17:35:15] <JymmmmEMC> hey skunkworks, what be the haps?
[17:35:38] <skunkworks> ah - not much. pretty much relaxed this weekend.. It was nice
[17:35:38] <petev> yeah, I don't know what happened. I had added some code to update the tune force dynamically during a tune when cradek was testing, but I guess I never copied the tested version back to my dev machine. I checked in some half baked version with a bug.
[17:35:57] <skunkworks> petev: cool :)
[17:37:43] <skunkworks> http://www.cnczone.com/forums/showthread.php?t=39532
[17:39:01] <petev> it would be minor changes to the current driver to support it
[17:39:06] <petev> probably just some defines
[17:40:23] <petev> do you need hostmot-8?
[17:40:51] <petev> you get 4 additional encoder channels with hostmot-4 and more IO, but only 4 PWM channels
[17:41:53] <skunkworks> That is not me - I am not real familiar with the mesa card. Just relaying the question.
[17:42:49] <skunkworks> I should probably tell him to post on the email list for a better responce
[17:43:29] <JymmmmEMC> skunkworks: NOW we know your secret identity!
[17:43:48] <skunkworks> :) Na - samco on cnczone.
[17:44:04] <JymmmmEMC> If we didn't then, we do now =)
[17:44:10] <skunkworks> I also have skunkworks registered but never use it.
[17:45:17] <JymmmmEMC> I guarntee you don't want to know mine =)
[17:47:57] <JymmmmEMC> WTH? QUAD processor???
http://newspaperads.mercurynews.com/ROP/ads.aspx?advid=32664&adid=4698778&subid=16666939&type=
[17:49:47] <xemet> hi
[17:50:33] <JymmmmEMC> alex_joni:
http://newspaperads.mercurynews.com/ROP/ads.aspx?advid=32664&adid=4698778&subid=16666953&type=
[17:50:46] <xemet> jepler: could you kindly let me know the make and the model of the tiny servos you used for the pluto etch I see here:
http://emergent.unpythonic.net/projects/01142347802
[17:52:36] <xemet> alex joni: could you modify the italian page "contattaci" in the italian version of linuxcnc.org and change "como usare la rete" and " como utilisare la rete" in "come utilizzare la rete", thanks
[18:01:42] <jepler> xemet: the were "maxon" brand motors. 2140.937 (24V, 6W, 3940RPM) with gearhead 110451 (6:1) and encoder 103945 (100 line). but I got them at a surplus place and don't know how or where to order more.
[18:04:55] <xemet> thanks, don't worry, I will search...I need at least a base to know wjat kind of servos I need
[18:05:02] <xemet> I would like to try the pluto
[18:06:47] <jepler> the kind of servos you need depend more on the servo amp than the pluto. For an l298-based servo amp, choose small motors (36V 2A or less for two servos per L298, 36V 4A or less for one servo per L298)
[18:07:52] <xemet> I need snall servos...I would like an amp like the one you build, with l298
[18:08:15] <xemet> the encoder is with the motor or you purchased it separately and added it to the motor?
[18:08:40] <jepler> the motor, gearhead, and encoder came together as a single unit
[18:09:16] <xemet> I'm searching in the maxon website
[18:16:20] <JymmmmEMC> jepler: the first one you made was pancake steppers running off a 12vdc supply, right?
[18:17:01] <jepler> JymmmmEMC: yes
[18:17:08] <JymmmmEMC> jepler: full stepping?
[18:17:29] <jepler> xemet: unfortunately I don't know anywhere online to get inexpensive, weak servo motors.
[18:18:55] <xemet> jepler: what's the max voltage I can use with your drive?
[18:19:08] <jepler> xemet: read the l298 datasheet for maximum ratings
[18:19:35] <jepler> xemet: this is the same motor I was using, but this guy is selling them for a lot more than I paid:
http://cgi.ebay.com/ws/eBayISAPI.dll?ViewItem&item=170122473014
[18:19:48] <jepler> http://www.st.com/stonline/products/literature/ds/1773.pdf
[18:20:11] <anonimasu> hm...
[18:20:17] <anonimasu> didnt threadmill motors work too?
[18:20:45] <xemet> jepler Thanks!!
[18:21:41] <xemet> I would buy tham for 29$...but they are in US and custom duties and taxes could be a lot
[18:22:24] <jepler> what's a threadmill motor?
[18:22:45] <cradek> treadmill
[18:22:52] <anonimasu> treadmill..
[18:23:12] <cradek> I think some folks use them to run spindles because they have a nice speed control
[18:23:18] <jepler> interesting
[18:23:56] <anonimasu> I think les did tests with them for using them on the axes..
[18:24:00] <JymmmmEMC> Hmmm, I wonder if they have enough torque to be used as a low speed spindle?
[18:24:12] <anonimasu> JymmmmEMC: servos dont really have a big problem with torque..
[18:24:26] <cradek> JymmmmEMC: they probably have a lot, since they're meant to move people at low speed
[18:24:26] <JymmmmEMC> anonimasu: I mean tredmill motors
[18:24:37] <anonimasu> JymmmmEMC: yeah, but thoose should act similiar..
[18:24:48] <anonimasu> but dont take my word for it
[18:25:17] <JymmmmEMC> That might be a nice retrofit for my machine (if I can find an swarf proof housing for em)
[18:25:33] <jepler> here's an inexpensive motor with encoder:
http://www.hgrindustrialsurplus.com/search-products/product-detail.aspx?id=70-273-005
[18:25:41] <jepler> I have a feeling you can't drive it with an L298 though
[18:26:10] <anonimasu> cute
[18:28:40] <JymmmmEMC> jepler: was your pancake drive full stepping? half stepping ?
[18:29:47] <jepler> JymmmmEMC: half stepping
[18:30:36] <JymmmmEMC> jepler: Is that due to a limitation of the design?
[18:32:19] <jepler> the stepper motor version was using a very simple unipolar design, just darlington transistors. full and half stepping were the only choices
[18:32:54] <jepler> ooh we need to send jmkasunich down to hgr to pick up this scara robot:
http://www.hgrindustrialsurplus.com/search-products/product-detail.aspx?id=05-430-001
[18:33:14] <cradek> coool
[18:33:21] <anonimasu> wow
[18:33:32] <JymmmmEMC> jepler: Ah, ok. Is there a parts list? The schematic doens't show the chips used
[18:33:38] <anonimasu> cute
[18:34:37] <jepler> JymmmmEMC: ULN2803 if I recall correctly -- 8 darlington transistors plus freewheel diode in one DIP package
[18:35:23] <jepler> (the output from emc is winding activation, not step+direction)
[18:35:36] <JymmmmEMC> jepler: Cool, I've always wanted to make something that simple with ordinary parts that are easily available.
[18:35:51] <JymmmmEMC> jepler: winding... never heard of it.
[18:37:48] <JymmmmEMC> jepler: is winding activation already in emc, and just needs the ini configured for it?
[18:37:52] <jepler> JymmmmEMC: A unipolar 5-wire stepper can be viewed as 4 windings (motor coils), with the common end of each winding hooked to V+. To step, simply ground the other ends in the right sequence
[18:38:02] <jepler> yes it's selected by a different step_type argument
[18:38:23] <jepler> at least 3 different ones, in fact: full-step one-winding, full-step two-winding, and half-step
[18:38:55] <jepler> of course at the time I was doing this in the first place, I was still trying to use emc1 .. to change from step+direction to this mode you had to change the source and recompile
[18:39:34] <jepler> after that I found that I couldn't find PID values that kept the steppers even vaguely on the commanded path (emc1 forced you to use PID even for steppers)
[18:39:56] <jepler> so I wrote my own terrible program to run the motors based on a subset of g-code
[18:40:07] <JymmmmEMC> jepler: do you think those pancake motors have enough balls to turn a 10-32 threaded rod?
[18:40:08] <jepler> but with emc2 it is much easier
[18:40:25] <jepler> they are VERY weak motors and this kind of driver is the VERY WORST kind possible
[18:41:01] <JymmmmEMC> jepler: Yeah, I understand. But if someone just wanted to paly around, they could do it for less than $50 total
[18:42:03] <jepler> the motors turn just fine when they're not loaded, or when turning an etch-a-sketch knob .. but I don't know how much more load they can take than that
[18:42:46] <JymmmmEMC> I suspect some type of 2:1 pulley might help torque wise
[18:43:14] <JymmmmEMC> and s/ipm/iph/ =)
[18:43:48] <jepler> that will also help with revolution, because many of the small motors are 7.5 degree instead of 1.2 degree.
[18:45:00] <JymmmmEMC> jepler: do you remember what amp/voltage/ohms the motors you used were? Just so I have a ref when I hit surplus stores and look around.
[18:47:56] <JymmmmEMC> I see 12V, and what looks like 36ohm, but the pic is fuzzy =)
[18:48:27] <jepler> JymmmmEMC: I ran them off 12V, which I think was the rated voltage. sure could be 36 ohm, it's not 3.6 ohm.
[18:49:11] <JymmmmEMC> ok, cool. I'll have to remember the unipolar (I try to avoid that word much of the time =)
[18:49:57] <jepler> I think that 5 and 6 wire motors are unipolar
[18:50:44] <jepler> http://www.electronicsurplus.com/ccp71076-stepper-12vdc-48-step-rev-7-5-deg-step-82227-b82359-3350.htm
[18:51:08] <bill2or3> uhm.
[18:51:14] <bill2or3> Is this for a etch-cnc?
[18:51:34] <bill2or3> I have some small geared stepper motors at home.
[18:51:53] <jepler> I'm not sure what JymmmmEMC has in mind, but I'm certainly answering questions about etchcnc
[18:51:56] <bill2or3> ahh.
[18:52:33] <JymmmmEMC> jepler: Just something someone could play around with, without diving head in like the rest of us.
[18:53:08] <JymmmmEMC> Like maybe a scinece project a kid (or big 20yo+ kid) could do =)
[18:53:58] <JymmmmEMC> $2/ea and 5000 available
http://www.excesssolutions.com/cgi-bin/item/ES1766
[18:54:23] <bill2or3> I bet they'll give you a deal if you buy them all.
[18:54:54] <JymmmmEMC> bill2or3: Yeah, they'll deal somewhat. Especially if I give the guy a hard time =)
[18:56:57] <JymmmmEMC> I think they've been sitting on those motors for a few years.
[19:01:14] <JymmmmEMC> hi lerneaen_hydra
[19:01:24] <lerneaen_hydra> 'lo
[19:02:21] <lerneaen_hydra> what's happening?
[19:02:35] <JymmmmEMC> lerneaen_hydra: cnc etch a sketch
[19:02:54] <lerneaen_hydra> ah nice
[19:05:17] <lerneaen_hydra> your own?
[19:05:20] <lerneaen_hydra> stepper/servo?
[19:05:40] <JymmmmEMC> lerneaen_hydra: No, jepler's
http://axis.unpythonic.net/etchcnc
[19:06:21] <lerneaen_hydra> ah ok
[19:40:24] <ds2> Jymmm: what are you thinking of using these tiny motors for?
[19:40:40] <JymmmmEMC> Like maybe a scinece project a kid (or big 20yo+ kid) could do =)
[19:54:48] <JymmmmEMC> Just curiosity, do EMI filters from mains really and an impact to cnc controller?
[19:58:55] <jepler> I had a friend who had unreliable encoder counting when he had spindle on-off using an SSR. adding some ferrites around the spindle power line cured it.
[19:59:40] <JymmmmEMC> I meant like these kinds...
http://www.excesssolutions.com/mas_assets/full/ES3918.jpg
[20:01:38] <JymmmmEMC> I FINALLY got my hands on an 15A IEC power cord, then I took a closer look and the socket I have is only 5A (DOH!), but I was more curious than anything else, I know filtering couldn't hurt of course.
[20:05:49] <jepler> if you have any suspicion that your problems could be related to noise then choosing a part with EMI built in sounds like a good idea
[20:07:00] <JymmmmEMC> jepler: It's only $6 for a 15A one (hard to find, even w/o the filtering) But I guess I never suspected that there would be that much EMI for some odd reason.
[20:07:05] <lerneaen_hydra> heh, EMI built in. "now featuring built in interference, the device interferes with itself" ;)
[20:07:10] <JymmmmEMC> lol
[20:07:25] <JymmmmEMC> Hey, it's got the spec sheet up there for it too.
[20:07:31] <JymmmmEMC> http://www.excesssolutions.com/mas_assets/acrobat/ES3974.pdf
[20:11:52] <JymmmmEMC> Nice, they have a lot of snap-on ferrites
[20:14:38] <JymmmmEMC> Anyone need CAT6 STP 50M cables? lol
[20:14:58] <JymmmmEMC> is CAT6 solid or stranded?
[20:16:17] <JymmmmEMC> oh, it comes in both varietys
[20:22:40] <lerneaen_hydra> random note: it would be nice to have the up/down arrows bound to next/previous line in the file when you've already selected a line, so that pressing/holding down will step through the file rapidly and also show the selected line segments in the live plot
[20:22:46] <lerneaen_hydra> it would be a neat feature
[21:07:05] <skunkworks> JymmmmEMC: old powersupplies usually have them in..
[21:07:07] <skunkworks> computer
[21:07:49] <JymmmmEMC> skunkworks: Yeah, but not at 15A unfortunantly =)
[21:08:21] <jepler> http://www.makezine.com/blog/archive/2007/06/electric_bike_project.html
[21:08:20] <jepler> bbl
[21:09:24] <bill2or3> looks heavy.
[21:44:15] <anonimasu> night
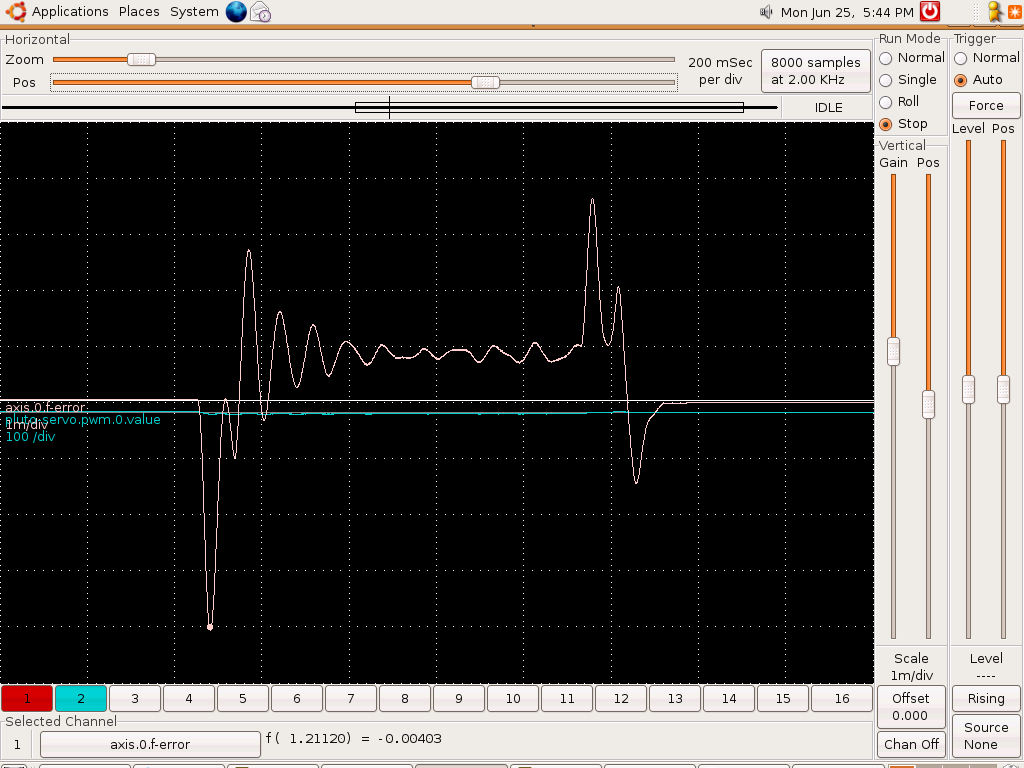
[22:38:30] <skunkworks> petev: It seems to work for me now.. But the numbers make for a very twitchy tune. (this is just a small servo with a fly-wheel attached.) May be outside what the z-n model can do.
[22:50:02] <skunkworks> petev: this is an at_pid with an effort of 10. Gives back P=570 I=23208 and D=3.5
http://www.electronicsam.com/images/KandT/servostart/ferrorat_pid.png
[22:56:37] <a-l-p-h-a_> what's the method to delete *.bak and recurse that into sub dirs?
[22:56:40] <skunkworks> These numbers are actually similar to the numbers I get from the wikipedia formula
[22:56:46] <a-l-p-h-a_> rm -R *.bak doesn't work.
[22:57:03] <a-l-p-h-a_> -Rf worked
[22:57:03] <a-l-p-h-a_> heh
[23:15:29] <skunkworks> petev: very cool though.. Nice work.
[23:21:04] <petev> skunworks, ZN is known for a pretty twitchy tune
[23:21:10] <petev> which tune mode did you use?
[23:21:26] <skunkworks> whatever the default was.
[23:21:29] <petev> if you have a velocity loop in your drive, I think mode 1 is best
[23:21:38] <petev> so you have a D value and no FF1?
[23:21:49] <skunkworks> ok - I will give it a try. I have a velocity moce
[23:21:53] <skunkworks> mode
[23:22:08] <skunkworks> ff1 is 0
[23:22:14] <petev> yeah, then use mode one which will give you P, I, FF1
[23:22:26] <skunkworks> No d?
[23:22:31] <petev> you will have to set your scaling according to the man page for the FF1 value
[23:22:38] <skunkworks> ok
[23:22:39] <petev> the velocity loop takes care of D
[23:23:08] <petev> that's the mode I use for my velocity mode drives and the tune is pretty good
[23:23:19] <skunkworks> oh - I think I am confused - I the whole loop is velocity.. I don't have tach feedback to the drives if that is what you mean
[23:23:24] <petev> though I do have to run a 5KHz servo rate as my drives are pretty quick
[23:23:56] <petev> huh, the PID is always a position loop in EMC
[23:24:30] <petev> what is the command to your drives?
[23:24:54] <skunkworks> pretty simple here - emc -> pluto -> pwm -> h-bridge -> motor -> encoder -> emc
[23:26:27] <petev> hmm, that is the setup cradek had and he had to tweak the numbers. If I recall, he had to add FF1 and FF2 and also adjust the numbers a bit from the auto-tune
[23:26:45] <petev> I think he said FF2 was very touchy
[23:27:24] <petev> he AT suggested much more I than he had, and this was good
[23:27:34] <cradek> my setup has a pretty large dead zone around zero - maybe +- 15 or 20% is pretty much dead
[23:27:40] <cradek> I wonder if that messes it up
[23:27:41] <petev> I think P was pretty close, but there was some diff in D
[23:28:19] <toastydeath> can you still balance a servo
[23:28:26] <petev> cradek, I also wonder how many poles a simple PID can compensate for
[23:28:58] <petev> it might be plain difficult to tune some systems if there are too many corners
[23:29:09] <cradek> definitely
[23:29:32] <cradek> my hand tuning works really well, but it's touchy like you say
[23:29:52] <petev> I think my system in pretty easy as the drive have a velocity loop and a torque loop
[23:30:00] <petev> so I basically have 3 PIDs in the whole system
[23:30:24] <petev> per axis that is
[23:37:55] <a-l-p-h-a_> what's the linux command to tar something up, and recurse sub folders, even empty ones?
[23:38:43] <cradek> tar cvzf filename.tar.gz the-dir
[23:39:24] <petev> maybe h too if you have sym links and you want what they point to
[23:39:50] <a-l-p-h-a_> I'm gonna have to write that one down.
[23:56:06] <a-l-p-h-a_> cradek, can that grab hidden files as well? like .htaccess files?
[23:57:07] <cradek> yes
[23:57:24] <a-l-p-h-a_> oh it did! sweet!
[23:57:24] <a-l-p-h-a_> thanks man.
[23:57:29] <cradek> tar handles everything well except maybe hard links and files with holes
[23:57:37] <a-l-p-h-a_> holes?
[23:57:55] <cradek> sparse files
[23:58:09] <cradek> files that take less space on disk than their total size
[23:58:23] <a-l-p-h-a_> wouldn't those be corrupt files?
[23:59:04] <cradek> no
[23:59:59] <cradek> many files have holes
{kind=link}
{kind=link}