Back
[06:07:33] <zbyte> i tried installing EMC on ubuntu but it seems the site mentioned in emc2-install.sh script is not resolving, anyone else experiencing this? Err
http://dsplabs.cs.upt.ro dapper Release.gpg
[06:07:33] <zbyte> Temporary failure resolving 'dsplabs.cs.upt.ro'
[08:18:12] <A-L-P-H-A> zbyte, you'll have to wait for alex_joni to be back.
[08:24:59] <zbyte> k, thx
[09:16:42] <alex_joni> morning
[09:17:09] <alex_joni> zbyte: are you still getting that?
[09:37:36] <alex_joni> anyone from .it around?
[11:33:23] <Bo^Dick> does isp-dongles require that a crystal is connected to the avr? can't the avr be isp programmed without a crystal attached to it?
[11:39:17] <alex_joni> depends on the programmer
[11:39:55] <Bo^Dick> could it possibly depend on if the programmer has a xtal in it?
[11:40:04] <alex_joni> but mostly it's a data communication, which assumes the other side works (is live) and receives the data from the PC
[11:40:24] <alex_joni> Bo^Dick: I think you can use a JTAG programmer for boards without XTAL, but the others might need to have one.. not sure
[11:40:30] <alex_joni> check avrfreaks.com for details
[11:56:18] <jepler> yes, for the low-voltage serial, the avr has to have a clock source (external clock waveform, external crystal, internal rc, depending on the avr and its fuse settings)
[11:56:52] <alex_joni> morning jeff
[11:57:10] <jepler> hi alex
[11:57:25] <alex_joni> jepler: care to look at wiki.linuxcnc.org and tell me what ou think ?
[11:58:01] <alex_joni> s/ou/you/
[11:59:31] <jepler> this text seems like it should be revised or even just removed: "EMC is free software with open source code. We are making the transition to the GPL license.
[11:59:34] <jepler> This accomplished with the new EMC2 development. EMC2 was an effort to simplify, organize, and extend the original EMC software in order to make it more developer friendly."
[11:59:52] <jepler> maybe just the GPL bit
[12:02:42] <alex_joni> jepler: feel free
[12:02:48] <alex_joni> I got it off www.linuxcnc.org :)
[12:53:50] <CIA-8> 03jepler 07HEAD * 10emc2/src/Makefile:
[12:53:50] <CIA-8> build 'tcl.pot' with messages from the tcl files, and build .msg files from .po
[12:53:50] <CIA-8> files.
[12:53:50] <CIA-8> 03jepler 07HEAD * 10emc2/src/po/ (de.po ja.po ro.po tcl.pot Submakefile axis.pot ja.msg ro.msg):
[12:53:50] <CIA-8> build 'tcl.pot' with messages from the tcl files, and build .msg files from .po
[12:53:50] <CIA-8> files.
[13:03:19] <oem> Hello. I cannot connect here
http://dsplabs.cs.upt.ro/emc2/. Is there a mirror for it?
[13:04:07] <CIA-8> 03compile-farm 07BDI-2.18 (2.2.18-rtl3.0) * 10emc2head/: build FAILED ; see
http://linuxcnc.org/compile_farm/emc2head_slot2_log.txt
[13:08:17] <jepler> oem: me either. I don't know of a mirror.
[13:08:50] <CIA-8> 03compile-farm 07BDI-TNG (2.4.18-rtai) * 10emc2head/: build FAILED ; see
http://linuxcnc.org/compile_farm/emc2head_slot3_log.txt
[13:09:36] <jepler> curse you old systems!!!
[13:14:17] <oem> jepler, it is funny but I managed to find it with google at
http://dsplabs.utt.ro/emc2/
[13:14:52] <oem> I suppose the web pages should be updated accordingly
[13:15:44] <jepler> oem: I hadn't heard that the address changed -- alex_joni would know for sure
[13:19:19] <CIA-8> 03jepler 07HEAD * 10emc2/src/ (Makefile Makefile.inc.in configure configure.in): check for msgfmt --tcl support (it doesn't on bdi2 or bdi-live)
[13:23:01] <CIA-8> 03jepler 07HEAD * 10emc2/scripts/realtime.in: find fuser at configure time, not at runtime
[13:23:01] <CIA-8> 03jepler 07HEAD * 10emc2/src/ (configure configure.in): find fuser at configure time, not at runtime
[13:30:54] <alex_joni> jepler, oem: both addresses refer to the same server
[13:31:18] <CIA-8> 03compile-farm 07BDI-2.18 (2.2.18-rtl3.0) * 10emc2head/: build PASSED
[13:31:55] <alex_joni> but are handled by 2 different DNS servers I think, and one of them seems down
[13:35:04] <CIA-8> 03compile-farm 07BDI-TNG (2.4.18-rtai) * 10emc2head/: build PASSED
[13:37:28] <alex_joni> dig: Couldn't find server 'ns.cs.upt.ro': Temporary failure in name resolution
[13:37:48] <oem> alex_joni, however, I am only able to connect here
http://dsplabs.utt.ro/emc2/
[13:38:04] <oem> yes, it can find the address at all
[13:38:08] <oem> cant
[13:38:13] <alex_joni> oem: right, dsplabs.cs.utt.ro and dsplabs.utt.ro are 2 addresses that should work now
[13:38:23] <CIA-8> 03jepler 07HEAD * 10emc2/src/po/Submakefile: rebuild rs274_err.pot
[13:38:42] <alex_joni> oem: it's a tricky problem, the whole *.utt.ro domain is changing names to *.upt.ro
[13:39:05] <alex_joni> that's why the install script uses *.upt.ro (because in the end, that will be the only valid name)
[13:39:06] <oem> alex_joni, i see, so the install script contained the not functioning address
[13:39:22] <alex_joni> oem: right..
[13:39:25] <oem> ok
[13:39:40] <alex_joni> oem: thanks for the understanding
[13:40:35] <alex_joni> we (I at least) are thinking about moving the whole repository to www.linuxcnc.org
[13:40:48] <oem> ok, i bet that would simplify it a bit.
[13:45:34] <alex_joni> oem: right, lots simpler, but it involves a lot of users which already have that repository in their lists who need updating
[13:46:01] <Lerneaen_Hydra> 'lo alex
[13:46:05] <alex_joni> hi LH
[13:46:58] <Lerneaen_Hydra> 'sup?
[13:46:58] <oem> alex_joni, true, that will not be completely painless then
[13:46:58] <Lerneaen_Hydra> logger_aj: bookmark
[13:46:58] <Lerneaen_Hydra> See
http://81.196.65.201/irc/irc.freenode.net:6667/emc/2006-08-26#T13-46-58-2
[13:47:01] <Lerneaen_Hydra> strange
[13:47:04] <Lerneaen_Hydra> that was slow
[13:47:13] <alex_joni> Lerneaen_Hydra: I'm a bit pissed at the problems with dsplabs right now
[13:47:25] <alex_joni> actually with the name server for it
[13:47:35] <Lerneaen_Hydra> were they the ones that made labview?
[13:47:48] <alex_joni> no, their the ones hosting the emc2 repo :)
[13:47:52] <alex_joni> and lots of iso's
[13:51:48] <Lerneaen_Hydra> o
[13:51:49] <Lerneaen_Hydra> oh
[13:51:57] <Lerneaen_Hydra> I see
[13:52:22] <Lerneaen_Hydra> so temporary issues?
[13:53:31] <alex_joni> Lerneaen_Hydra: yes, definately
[13:53:54] <Lerneaen_Hydra> not like SF then ;)
[13:54:27] <alex_joni> probably the admins are morons, I need to get my ass over there and teach them ... :(
[13:59:57] <Lerneaen_Hydra> are they expensive?
[14:00:00] <Lerneaen_Hydra> or is it free?
[14:00:04] <alex_joni> free
[14:00:14] <Lerneaen_Hydra> nice
[14:00:26] <Lerneaen_Hydra> so the stable/testing branches are down I take it?
[14:00:39] <alex_joni> no, this has nothing to do with CVS
[14:00:59] <Lerneaen_Hydra> yeah, stable & testing, not head
[14:01:09] <alex_joni> all that is in CVS
[14:01:19] <Lerneaen_Hydra> even the precompiled?
[14:01:27] <alex_joni> only the debs are affected right now (depending what you have in your sources.list)
[14:01:31] <Lerneaen_Hydra> oh
[14:01:38] <Lerneaen_Hydra> so the apt-get install emc2 link?
[14:01:43] <alex_joni> yeah
[14:01:48] <Lerneaen_Hydra> oh.. :(
[14:02:06] <alex_joni> but it's probably only a 1-2 days problem
[14:02:19] <Lerneaen_Hydra> ok
[14:05:29] <Lerneaen_Hydra> uh, I'm feeling slow today (mentally)
[14:05:36] <Lerneaen_Hydra> when doing a G33 move
[14:05:47] <Lerneaen_Hydra> K is always defined as movement per rev?
[14:06:11] <Lerneaen_Hydra> so when doing a taper it would be (IX^2+IZ^2)^0.5
[14:06:21] <Lerneaen_Hydra> as the distance
[14:06:46] <Lerneaen_Hydra> so to keep the same pitch (say a lead out) you would want a higher pitch
[14:07:38] <alex_joni> Lerneaen_Hydra: I'm not sure I'm the right person to ask about G33..
[14:07:47] <alex_joni> maybe someone else who knows about it is around
[14:07:52] <Lerneaen_Hydra> I see ;)
[14:08:15] <Lerneaen_Hydra> I take it cradek knows best?
[14:09:13] <alex_joni> given that he implemented it.. probably so :)
[14:09:59] <Lerneaen_Hydra> I'll have to see if he comes by here then
[14:24:17] <jepler> Lerneaen_Hydra: yes, it's distance per rev, not Z per rev. This has the nice property of making even an X-only move be meaningful when in G33 mode. But as you observe, it means you have to have different K values during a taper.
[14:24:43] <Lerneaen_Hydra> ok, then I know that at least
[14:25:01] <Lerneaen_Hydra> I find that behavior better than the standard Z per rev
[14:25:10] <Lerneaen_Hydra> however it messes things up with my CAM app ;)
[14:25:25] <Lerneaen_Hydra> and I feel slow today, so I can't get the math to work out (embarassingly enough)
[14:28:01] <Lerneaen_Hydra> ;CODE:#PITCH=PITCH
[14:28:01] <Lerneaen_Hydra> ;CODE:#USER1=#PITCH*((((#XHOLD-#XMOVE)^2+(#ZHOLD-#ZMOVE)^2)^0.5)/(#XHOLD))
[14:28:01] <Lerneaen_Hydra> [DELETE][BLKNUM][THREADGCODE][XMOVE][ZMOVE][USER-1]
[14:28:01] <Lerneaen_Hydra> is what I have so far for my app, but naturally that's not what I want, as that gives out the total distance moved per move (so a 45° move with the sides of 1 gives a move of sqrt(2)
[14:28:01] <Lerneaen_Hydra> and I don't want to divide by Z distance, as that gives a divide by zero sometimes
[14:29:22] <jepler> ZHOLD is the prior Z coordinate and ZMOVE is the new Z coordinate?
[14:29:32] <Lerneaen_Hydra> AFAIK it is
[14:29:56] <jepler> if so, doesn't your division need to involve the difference of X, not just #XHOLD?
[14:30:00] <Lerneaen_Hydra> also I don't (AFAIK again) have acess to sin/cos/tan
[14:30:17] <Lerneaen_Hydra> I have XHOLD-XMOVE
[14:30:28] <Lerneaen_Hydra> and if it's negative it doesn't matter as it's squared
[14:30:37] <jepler> that's not what you pasted. "..../(#XHOLD))"
[14:30:45] <Lerneaen_Hydra> oops
[14:30:54] <Lerneaen_Hydra> that's not supposed to be there ;)
[14:32:11] <Lerneaen_Hydra> brb
[14:39:08] <Lerneaen_Hydra> back agai
[14:39:10] <Lerneaen_Hydra> again
[14:40:32] <Lerneaen_Hydra> ;CODE:#USER1=#PITCH*(((((#XHOLD-#XMOVE)^2+(#ZHOLD-#ZMOVE)^2)^0.5)/(((#XHOLD-#XMOVE)^2)^0.5)))
[14:40:34] <Lerneaen_Hydra> Is what it should be
[14:40:54] <Lerneaen_Hydra> err
[14:41:06] <Lerneaen_Hydra> divided by Z/feed/hold
[14:41:56] <Lerneaen_Hydra> but that means that when I do pure X feed that I'll get a divide by zero. however now that I think about it that seems to be an issue to do with the cam app more than anything else
[14:42:11] <Lerneaen_Hydra> so the ideal solution wouldn't divide by Zfeed
[14:42:14] <Lerneaen_Hydra> but something else
[14:42:58] <Lerneaen_Hydra> something that when doing a straight X or Z feed is 1, and when doing 45° is sqrt(2), and everything inbetween would be something inbetween
[14:50:29] <alex_joni> this screams for sin or cos
[14:51:47] <SWPadnos> are you trying for CSS, or just keeping the pitc constant on a tapered thread?
[14:51:51] <SWPadnos> pitch
[14:51:57] <alex_joni> pitch
[14:51:59] <Lerneaen_Hydra> alex_joni: yeah..
[14:52:04] <Lerneaen_Hydra> pitch
[14:52:37] <Lerneaen_Hydra> so I think I need some form of logic that if >=45°, then use ZFEED, else use XFEED
[14:53:42] <alex_joni> maybe MAX(XFEED, ZFEED) ?
[14:54:07] <Lerneaen_Hydra> max?
[14:54:41] <Lerneaen_Hydra> this is not a "real" programming langauge, it's some proprietary edgecam syntax
[14:55:10] <SWPadnos> and the problem is that the K parameter is proportional to the vector move, not X only - wo you're trying to correct for the XZ move length?
[14:55:17] <SWPadnos> s/wo/so/
[14:55:28] <Lerneaen_Hydra> yeah
[14:55:43] <Lerneaen_Hydra> and not have divide/0 when doing a straight thread turn
[14:56:13] <SWPadnos> so you have an ideal K parameter (for an X only move) - you just increase that by SQRT(dx^2 + dz^2)
[14:56:41] <SWPadnos> by multiplying
[14:56:55] <SWPadnos> err - dividing
[14:57:05] <SWPadnos> no - wait - I should have more coffee :)
[14:57:25] <Lerneaen_Hydra> that would negate the compensation though
[14:57:31] <Lerneaen_Hydra> a*b/b = a
[14:57:46] <SWPadnos> isn't that what you want to do?
[14:57:57] <SWPadnos> a = PITCH, b = vector length
[14:58:05] <SWPadnos> you want the end pitch to be a
[14:58:40] <Lerneaen_Hydra> as it is now pitch is correct for "pure" X and Z moves (movea where only one axis moves)
[14:59:16] <SWPadnos> ok - let's work it out with some numbers, then make a formula :)
[14:59:18] <Lerneaen_Hydra> but when interpolating the error rises, up to max at 45° where is fault is sqrt(2)*pitch
[14:59:35] <Lerneaen_Hydra> yeah
[14:59:48] <Lerneaen_Hydra> so say ideal pitch = 1
[15:00:11] <SWPadnos> 1 rev per unit of travel?
[15:00:19] <Lerneaen_Hydra> g0 x10 z0
[15:00:20] <Lerneaen_Hydra> g33 z-10 k1 <-- correct pitch
[15:00:23] <Lerneaen_Hydra> yes
[15:00:25] <SWPadnos> ok
[15:01:15] <SWPadnos> so now you angle that to 45 degrees, and you still want 1 "thread", but the vector travel is now sqrt(2)
[15:01:29] <SWPadnos> ?
[15:01:47] <Lerneaen_Hydra> g0 x0 z0
[15:01:48] <Lerneaen_Hydra> <current, default behavior> g33 x10 z10 k1
[15:01:50] <Lerneaen_Hydra> <desired behavior> g33 x10 z10 k1.412
[15:01:57] <Lerneaen_Hydra> yeah, exactly
[15:02:08] <SWPadnos> ok, so K has to increase
[15:02:19] <Lerneaen_Hydra> g0 x0 z0
[15:02:21] <Lerneaen_Hydra> g33 x10 <-- current and desired behavior
[15:02:24] <SWPadnos> so myltiply ideal K by sqrt(dx^2+dz^2)
[15:03:04] <SWPadnos> which is 1 for a pure X or pure Z move
[15:03:15] <Lerneaen_Hydra> ah, that's the thing, dx or dz is D for the *whole* move
[15:03:34] <Lerneaen_Hydra> so a move where z=10 and x=0 would be K*10
[15:03:54] <Lerneaen_Hydra> not the intended behavior
[15:04:10] <SWPadnos> there's a problem though - for an angled move, you don't know which side the K is relative to
[15:05:44] <Lerneaen_Hydra> exactly, however I think I can assume that when ang<45, it's Z, =45, either Z or X, and >45, X
[15:05:44] <SWPadnos> can you do an if in the CAM language?
[15:05:44] <Lerneaen_Hydra> that should be possible
[15:05:54] <Lerneaen_Hydra> though I need to figure out the syntax
[15:06:14] <Lerneaen_Hydra> I'll make sure to upload the cam post to the wiki later ;)
[15:06:23] <SWPadnos> if dx > dz, iX is the controlling variable
[15:07:05] <Lerneaen_Hydra> yeah
[15:07:32] <SWPadnos> theoretically, that also would eliminate divide by 0, unless the move is zero length
[15:07:36] <SWPadnos> brb
[15:08:33] <Lerneaen_Hydra> zero length doesn't exist so that's a non-issue
[15:12:55] <SWPadnos> ok. if no zero length segments can exist, then you can do it with two regions decided by dX >= dZ
[17:10:19] <MichelG> Hello everyone! I am trying to install emc2 on a fresh umbunto, but dsplabs.cs.upt.ro is down. Is there another mirror?
[17:10:50] <Lerneaen_Hydra> * Lerneaen_Hydra pokes alex_joni
[17:10:56] <Lerneaen_Hydra> alex_joni might know
[17:11:04] <alex_joni> MichelG: try dsplabs.cs.utt.ro instead
[17:11:16] <alex_joni> MichelG: sorry for the issue
[17:11:27] <MichelG> OK, I try...
[17:11:45] <alex_joni> MichelG: I assume you're familiar with changing the names in /etc/apt/sources.list ?
[17:12:17] <MichelG> That's what I am doing, Thanks!
[17:12:24] <alex_joni> MichelG: ok
[17:16:42] <MichelG> OK, it works, but I had to modify the tricky ;-) install script. downloading now.
[17:16:53] <alex_joni> MichelG: cool..
[17:30:18] <MichelG> Ok, it runs, and my sherline mill jogs :-))
[17:31:54] <alex_joni> MichelG: congrats :)
[17:32:01] <alex_joni> that was a fast setup :D
[17:32:13] <alex_joni> 20 minutes?
[17:32:59] <MichelG> Yes, but it was working before with the BDI...
[17:33:19] <alex_joni> MichelG: ok.. any issues you encountered?
[17:43:51] <MichelG> Alex, no issues, except the wrong apt repository. People there did a tremendous job. Now, I have to setup a wifi card using ndiswrapper :-( , and make my digitizing probe work...
[17:44:50] <alex_joni> MichelG: I made some debs for Dapper for that
[17:44:52] <MichelG> What do you call debs?
[17:44:53] <alex_joni> MichelG: they aren't in the 'official' repo yet
[17:45:00] <alex_joni> http://dsplabs.cs.utt.ro/~juve/tempdebs/
[17:45:25] <alex_joni> MichelG: Ubuntu (and BDI) packages are called debs (foo.deb)
[17:46:44] <alex_joni> MichelG: these restricted modules you see there offer support for some wireless cards, etc.
[17:46:54] <alex_joni> MichelG: what wifi card do you have?
[17:47:50] <MichelG> OK alex, thanks; I have a Marvel technology PCI wifi, with a 88W8335 chip.
[17:48:42] <MichelG> I heard a driver was being written for this chip, but nothing released yet.
[17:48:59] <CIA-8> 03jepler 07HEAD * 10emc2/src/po/axis.pot:
[17:48:59] <CIA-8> fix some bugs in image-to-gcode when no file was specified, and mark it for
[17:48:59] <CIA-8> translation.
[17:48:59] <CIA-8> 03jepler 07HEAD * 10emc2/src/emc/usr_intf/axis/scripts/image-to-gcode.py:
[17:48:59] <CIA-8> fix some bugs in image-to-gcode when no file was specified, and mark it for
[17:48:59] <CIA-8> translation.
[17:49:21] <Lerneaen_Hydra> jepler: is image-to-gcode now integrated in axis?
[17:49:27] <alex_joni> Lerneaen_Hydra: yes
[17:49:37] <Lerneaen_Hydra> nice :D
[17:49:42] <jepler> it's now in the emc2 cvs and automatically installed
[17:49:43] <Lerneaen_Hydra> how do you config it?
[17:49:45] <jepler> it is distinct from AXIS
[17:49:48] <Lerneaen_Hydra> oh
[17:49:56] <Lerneaen_Hydra> ok, so standard configuring?
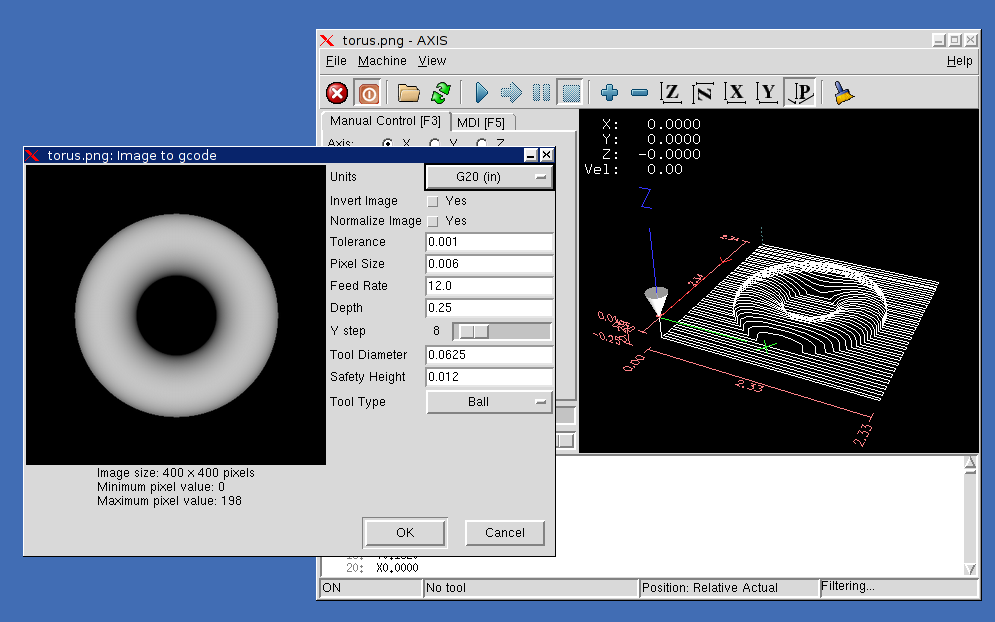
[17:50:04] <jepler> run configs/sim/axis.ini and open a .png file -- try torus.png from nc_files/
[17:50:06] <Lerneaen_Hydra> ie modifying the .py?
[17:50:11] <Lerneaen_Hydra> oh, that nice
[17:50:14] <Lerneaen_Hydra> :D
[17:50:25] <Lerneaen_Hydra> how new a version of head do I need?
[17:50:29] <Lerneaen_Hydra> is a week old good enough?
[17:50:31] <jepler> no
[17:50:33] <alex_joni> one day?
[17:50:34] <Lerneaen_Hydra> ok
[17:50:37] <alex_joni> might be too old
[17:50:38] <alex_joni> :)
[17:50:43] <Lerneaen_Hydra> I see, I'll update then
[17:50:46] <alex_joni> MichelG: maybe this helps:
http://www.ubuntuforums.org/showthread.php?t=208088
[17:50:52] <jepler> I checked it in less than 24 hours ago, I think
[17:50:56] <Lerneaen_Hydra> ok
[17:51:53] <jepler> 18:01:13 <CIA-8> jepler HEAD * emc2/src/emc/usr_intf/axis/scripts/image-to-gcode.py: Add the image-to-gcode input filter and correctly configure sim/axis to use it
[17:52:11] <jepler> now it's 12:54 in my time zone, the next day .. so, 19 hours ago
[17:52:31] <alex_joni> 02:01 < CIA-8> jepler HEAD *
[17:52:31] <alex_joni> emc2/src/emc/usr_intf/axis/scripts/image-to-gcode.py: Add the
[17:52:31] <alex_joni> image-to-gcode input filter and correctly configure sim/axis to
[17:52:31] <alex_joni> use it
[17:52:39] <alex_joni> 18 hours ago
[17:53:06] <alex_joni> 18:55 actually :)
[17:56:49] <MichelG> Alex_Joni: Great link! at least it proves that ndiswrapper works. But the guy was not able to make it works with native drivers. thanks again.
[17:57:53] <alex_joni> MichelG: no issues ;)
[17:57:53] <alex_joni> MichelG: where are you from? if I may ask
[17:58:03] <Lerneaen_Hydra2> 'lo again <lathe computer>
[17:59:52] <MichelG> Alex_joni: I am from France, in normandy. A background in software & hardware dev, + mechanical engineer.
[18:01:29] <MichelG> Alex_joni: I have to leave now. see you during the next days. Bye
[18:02:10] <alex_joni> MichelG: bye.. add yourself to frappr.com/emc2 when you get the chance
[18:03:02] <Lerneaen_Hydra2> logger_aj: bookmark
[18:03:02] <Lerneaen_Hydra2> See
http://81.196.65.201/irc/irc.freenode.net:6667/emc/2006-08-26#T18-03-02
[18:03:02] <alex_joni> logger_aj: shut up
[18:03:29] <alex_joni> he's tired?
[18:04:22] <Lerneaen_Hydra2> jepler: how do I actually open the image file?
[18:04:40] <alex_joni> File->Open ?
[18:04:41] <jepler> Lerneaen_Hydra2: are you using the latest sim/axis.ini?
[18:04:59] <jepler> Lerneaen_Hydra2: If you are, then *.png files should appear in the "Open" dialog
[18:05:49] <Lerneaen_Hydra2> oh, it has to be the sim .ini?
[18:06:13] <jepler> otherwise, see here:
http://unpy.net/emc2-docs/gui/axis/index.html#SECTION001111000000000000000
[18:06:22] <alex_joni> Lerneaen_Hydra: at least look at that, and copy over the stuff refering to image-to-gcode
[18:06:38] <jepler> (except that example has "image-to-gcode.py" and not "image-to-gcode" which is actually correct)
[18:08:02] <Lerneaen_Hydra2> I get exit code 1 when opening the png
[18:08:38] <Lerneaen_Hydra2> sim/axis
[18:08:38] <Lerneaen_Hydra2> fresh compile
[18:08:38] <jepler> there are some additional packages needed for image-to-gcode. from memory, try this: sudo apt-get install python2.4-imaging-tk python2.4-numarray
[18:08:50] <Lerneaen_Hydra2> oh, I see
[18:08:59] <jepler> is there an ImportError printed in the terminal? If so, that's probably the cause.
[18:09:16] <Lerneaen_Hydra2> no error actually
[18:09:19] <jepler> huh
[18:09:22] <Lerneaen_Hydra2> in the terminal that is
[18:09:30] <Lerneaen_Hydra2> I didn't run it in debug mode though
[18:10:32] <Lerneaen_Hydra2> huh, I didn't have gcc3.4 earlier
[18:10:54] <Lerneaen_Hydra2> is emc running with gcc4.0?
[18:12:23] <jepler> gcc3.4-base is required by python2.4-numarray for a reason I don't understand...
[18:14:22] <jepler> huh, you're right that there is no error shown on the terminal if those other packages aren't installed
[18:14:25] <jepler> did you get it to work yet?
[18:15:12] <Lerneaen_Hydra2> hmm, the code seems to be wrong/not correct at all
[18:15:12] <Lerneaen_Hydra2> there's no actual work done
[18:15:33] <jepler> eh?
[18:15:36] <Lerneaen_Hydra2> does some positioning g0 , and then m2 end
[18:15:52] <Lerneaen_Hydra2> maybe I did something bad in the config
[18:16:16] <jepler> did you change your settings from the one in this image?
http://axis.unpy.net/files/01156615138/i2g.png
[18:17:13] <Lerneaen_Hydra2> I changed it significantly
[18:17:20] <jepler> ah, what did you change?
[18:17:34] <jepler> you can 'rm ~/.image2gcoderc' to get back the defaults
[18:18:19] <Lerneaen_Hydra2> mm, 0.01 tol, 0.1 pixel size, 100 feedrate, 0.25 depth, ystep 1, tool diameter 6.35 (1/4"), safety 0.5
[18:18:59] <Lerneaen_Hydra2> it may be a good idea to be able to set ystep to values lower than 1
[18:19:15] <Lerneaen_Hydra2> I assume 1 gives 1 unit of travel between each pass
[18:19:36] <Lerneaen_Hydra2> typically I use steps around 0.1-0.05mm for small stuff
[18:20:32] <jepler> no, "ystep" is in pixels, not units
[18:20:32] <Lerneaen_Hydra2> huh?
[18:20:32] <Lerneaen_Hydra2> so you can skip pixels?
[18:21:09] <Lerneaen_Hydra2> how effective is the nose-radius compensation? :D
[18:21:40] <Lerneaen_Hydra2> hmm, now it worked
[18:21:45] <Lerneaen_Hydra2> I changed settings slightly
[18:24:06] <jepler> the tool shape compensation should be good -- a depth image of the tool is created at the same scale as the image (so a 6.35 tool on a 0.1 pixel size will be 63 or 64 pixels on a side). at each point, the input image is added to the tool shape, and the minimum of the resulting pixel values is how far down it cuts
[18:24:41] <Lerneaen_Hydra2> ooh nice so gouging protection in other words
[18:25:01] <jepler> the "step" is in pixels instead of units so that there's always a well-defined answer to "what pixel is under the pixel" -- if you have a scale of .3 and a step of 1 units, then there's not such a convenient answer.
[18:25:30] <Lerneaen_Hydra2> oh, I see
[18:26:16] <jepler> I tried those settings you gave me, and got a 15kline file
[18:26:16] <jepler> yes, it's gouging protection
[18:26:16] <jepler> so you got it to work? hooray.
[18:26:16] <Lerneaen_Hydra2> so setting step to 1 gives 1:1 WRT pixel size and "resolution" of the file
[18:26:25] <Lerneaen_Hydra2> setting 2 "lowers" the resolution by two?
[18:26:39] <Lerneaen_Hydra2> works great :D
[18:26:44] <Lerneaen_Hydra2> 15k is small ;)
[18:27:05] <Lerneaen_Hydra2> as long as the gcode file is under 1gb it's easy to handle
[18:27:19] <Lerneaen_Hydra2> over 1gb is more cumbersome
[18:27:33] <Lerneaen_Hydra2> CAM gives you thick skin WRT file size
[18:28:09] <etla> jepler: I saw the Douglas-Peucker simplification you committed, do you know of something similar for arcs ? i.e. would take a lot of line segments as input and output arcs ?
[18:29:28] <jepler> etla: I'm afraid I don't.
[18:31:02] <jepler> etla: I don't know how well it would work, but if you take the 3 points the DP method gives you (the first, the worst, and the last), and find an arc through the three points, you can then find out if the rest of the points lie near enough to that arc. In that case, do not recurse, but output an arc.
[18:31:35] <Lerneaen_Hydra2> jepler: how long did it take to code the GUI?
[18:31:45] <jepler> Lerneaen_Hydra2: oh, I dunno -- I probably spent an hour or two at it
[18:31:59] <Lerneaen_Hydra2> the entire thing?
[18:32:11] <jepler> no, for the GUI
[18:32:14] <Lerneaen_Hydra2> ok
[18:32:39] <jepler> the tool shape compensation code I lifted from somewhere else, so it didn't take a long time either
[18:32:51] <jepler> and the module now called 'rs274.author' existed for a long time too
[18:33:05] <Lerneaen_Hydra2> I see
[18:33:58] <jepler> in fact image-to-gcode.py has been laying around for a year or more, since chris posted it on his blog...
[18:33:58] <Lerneaen_Hydra2> all you need now is support for splines and nurbs! ;)
[18:33:58] <Lerneaen_Hydra2> yeah I saw that script lying around
[18:34:18] <Lerneaen_Hydra2> one thing that would be trivial to add and good to have would be an option to have a second trace, rotated 90 degrees around
[18:34:49] <Lerneaen_Hydra2> so if there are bits that wouldn't give good surface (high angle) then that is fixed
[18:35:07] <jepler> hm .. I'll take your word about it -- I'm really quite naive about CAM
[18:35:50] <Lerneaen_Hydra2> one step more advanced than that would be taking the "derivative" of the image, and only applying the rotated toolpath to sections that are "extreme" (some type of configurable threshold would be needed)
[18:37:52] <jepler> to do the first thing you suggest, you'd just need to make a copy of the code from about line 87 to 104, and change it so it iterates in "x" in the outer loop and "y" in the inner loop
[18:38:25] <Lerneaen_Hydra> yeah
[18:38:33] <Lerneaen_Hydra> that should be very simple
[18:38:59] <Lerneaen_Hydra> though innefective when machining (personally though I like the feel of the surface finish that that gives)
[18:39:06] <Lerneaen_Hydra> my jogwheels are shaped like that
[18:39:23] <jepler> there should probably be various options for the milling order
[18:39:44] <jepler> for instance, always mill +X, not +X alternating with -X
[18:40:07] <Lerneaen_Hydra> yeah
[18:40:24] <Lerneaen_Hydra> also logic like up mill, down mill, or both is good
[18:40:49] <Lerneaen_Hydra> ftp://basic:basic@lerneaenhydra.shacknet.nu
[18:41:36] <Lerneaen_Hydra> perpendicular lace.png
[18:41:37] <Lerneaen_Hydra> shows what I mean
[18:41:37] <Lerneaen_Hydra> lets just hope edgecam doesn't get angry
[18:41:48] <Lerneaen_Hydra> up down mill.png too
[18:41:54] <Lerneaen_Hydra> (refresh)
[18:42:45] <Lerneaen_Hydra> up/down mill requires a lot more logic though
[18:42:51] <Lerneaen_Hydra> like f''(x)
[18:42:58] <jepler> yeah
[18:43:02] <Lerneaen_Hydra> *f '' (x)
[18:43:15] <Lerneaen_Hydra> however you would do that for an image :p
[18:43:20] <jepler> so it's about the curvature of the surface
[18:43:22] <Lerneaen_Hydra> should be possible though
[18:43:24] <Lerneaen_Hydra> yeah
[18:43:59] <Lerneaen_Hydra> that's the most important stuff
[18:44:02] <Lerneaen_Hydra> at least IMO
[18:44:42] <Lerneaen_Hydra> the more advanced stuff is mostly usefull with several tools
[18:44:53] <Lerneaen_Hydra> like roughing, planing, and so on
[18:46:03] <Lerneaen_Hydra> bad tp.avi is old, and probably rectified, it's a strange effect though
[18:46:03] <etla> ok...
[18:46:03] <Lerneaen_Hydra> take a look at bad tp.swf too
[18:49:09] <jepler> etla: hm, you can't just look whether all the points are near the arc, but the maximum distance between the segments and the arc
[18:49:44] <jepler> I don't know how you go about calculating that, but I suppose it just involves the angle of the chord and the radius of the arc
[18:50:03] <etla> ok... I have not thought about this very much
[18:50:15] <etla> just know that mastercam has this arc filter as an option
[18:50:42] <etla> lets you specify fitting of arcs in XY XZ or YZ plane, with radius between say 1 and 2500 mm
[18:51:00] <etla> then it goes throught the whole toolpath and tries to finds arcs with a specified tolerance
[18:51:13] <Lerneaen_Hydra> jepler: weren't you talking about some line/arc filtering method a while back?
[18:52:15] <jepler> Lerneaen_Hydra: lines only
[18:52:16] <Lerneaen_Hydra> oh, ok
[18:52:16] <Lerneaen_Hydra> oh, wasn't EMC limited to arcs in a G17/8/9 plane?
[18:52:20] <Lerneaen_Hydra> and not full 3d?
[18:52:26] <jepler> yes
[18:52:28] <alex_joni> XY, YZ, XZ
[18:52:43] <Lerneaen_Hydra> old limit from legacy limitations?
[18:53:34] <etla> I think it's what the rs274 spec says
[18:53:41] <jepler> part of the code supports arcs with arbitrary orientation, but there's no way in the language to specify those arcs
[18:55:00] <jepler> and so the parts that appear to support other orientations probably don't work, because they've never been tested
[18:56:03] <alex_joni> jepler: any reason against specifiying the full 3D arc in g-code?
[18:56:23] <alex_joni> start point (xyz), endpoint (xyz), center (xyz)
[18:56:44] <alex_joni> startpoint can be current position
[18:57:50] <etla> alex: that would be a new G-code command, not conforming to rs274 ?
[18:58:00] <jepler> that's what's currently specified, except that when all 3 coordinates are different from the start to the end it's a helix rather than an arc in some non-orthogonal plane
[18:58:25] <jepler> also that format is ambiguous for 360-degree arcs, because start == end
[18:58:32] <alex_joni> jepler: oh, so the issue is for helixes
[18:58:38] <alex_joni> right again
[18:59:21] <alex_joni> how about limiting circles to XY, XZ, YZ as they are now
[18:59:25] <jepler> what you need is g17.1 x- y- z- to specify the normal vector of the plane with the arc
[18:59:41] <Lerneaen_Hydra2> then again, when you do code advanced enough to need 3d arcs, you don't want to code that by hand
[19:00:03] <alex_joni> Lerneaen_Hydra2: right, but it's still better if CAM can make those arcs instead of a number of lines
[19:00:07] <etla> L_H: CAM programs just do it by outputting a _lot_ of short line segments
[19:00:21] <Lerneaen_Hydra2> yeah
[19:00:28] <Lerneaen_Hydra2> alex_joni: yes I know what you mean
[19:00:42] <alex_joni> http://www.norhtec.com/products/mcjr/index.html <- nice one
[19:00:45] <Lerneaen_Hydra2> but it makes the difference evolutionary rather than revolutionary
[19:01:55] <Lerneaen_Hydra2> nice!
[19:01:55] <Lerneaen_Hydra2> x86 and all
[19:02:02] <Lerneaen_Hydra2> probably a transmeta crusoe cpu
[19:02:19] <jepler> * jepler wanders off
[19:12:16] <alex_joni> not transmeta
[19:12:38] <alex_joni> Lerneaen_Hydra2: CPU SiS550 166Mhz SoC (System-On-Chip), x86 compatible, fanless
[19:13:03] <alex_joni> Lerneaen_Hydra2:
http://www.norhtec.com/products/mcjr/details.html
[19:13:14] <Lerneaen_Hydra2> oh, looks like something else
[19:13:22] <Lerneaen_Hydra2> too low power for EMC though :p
[19:13:29] <Lerneaen_Hydra2> nice for low-power stuff though
[19:13:39] <alex_joni> not for emc, probably for axis
[19:13:46] <alex_joni> and for lots of pulses
[19:13:53] <alex_joni> but I suspect a keystick might work
[19:14:13] <Lerneaen_Hydra2> like an EMC server of sorts?
[19:14:20] <Lerneaen_Hydra2> maybe a VNC client?
[19:14:44] <alex_joni> might even work full EMC, with GUI on another PC
[19:15:31] <Lerneaen_Hydra2> it would seem more likely to use that for the GUI, and some other system for the actual work
[19:15:52] <dmess> Hello all..... some days ITS GREAT TO BE ME.... ; )
[19:15:56] <Lerneaen_Hydra2> is next to 10m^3 of iron a few dm^3 isn't that much ;)
[19:16:18] <dmess> you've all heard me whine... im sure..
[19:16:27] <alex_joni> dmess: constantly
[19:16:30] <alex_joni> :))
[19:16:33] <dmess> but NOT today
[19:17:31] <Lerneaen_Hydra2> oh?
[19:17:33] <dmess> i found THE cutest machiine to make my most freaky part... and had it offered up to me...
[19:17:35] <Lerneaen_Hydra2> what's so good?
[19:18:23] <Lerneaen_Hydra2> cheap?
[19:18:23] <dmess> sure.. im in.. partner..
[19:18:32] <dmess> mecof?? i think.. italian
[19:19:01] <Lerneaen_Hydra2> nice :D
[19:19:05] <Lerneaen_Hydra2> pics?
[19:19:15] <dmess> mecor maybe.. i wasnt lookin at the tags... just drooling over the rest..
[19:19:54] <dmess> soon... Wed. i hope to go bak and show it to the VR guy.
[19:21:15] <dmess> we plan to model and prove it all in vericut or NCsimul type s'ware
[19:21:16] <dmess> machine.. fixtures... everything... RIGHT....
[19:21:49] <Lerneaen_Hydra2> nice!
[19:21:57] <Lerneaen_Hydra2> alex_joni: the GP+ has a parport....
[19:22:56] <dmess> we dont need no dam inspectors..... if you live downstream from the dam YOUR ass should be up there lookin for cracks....
[19:22:58] <alex_joni> Lerneaen_Hydra2: too costly
[19:23:21] <Lerneaen_Hydra2> hmm yeah
[19:23:35] <Lerneaen_Hydra2> for that price you get a cheap standard computer
[19:24:04] <Lerneaen_Hydra2> the client is almost OLPC minus screen, kb, mouse and generator
[19:24:52] <dmess> iwould like to know who could support adding EMC2 as an add on to an existing machine... to cycle a pallet changer and the likes??
[19:25:26] <dmess> part change over??
[19:25:28] <alex_joni> dmess: explain ?
[19:25:38] <alex_joni> would this run off some g-code files?
[19:25:45] <alex_joni> and lots of IO to synch ?
[19:26:04] <alex_joni> even some motions for the pallet ?
[19:26:17] <dmess> to use the interupts from an existing machine and add EMC2 to control the cell
[19:26:39] <alex_joni> dmess: should work with ClassicLadder
[19:26:57] <dmess> gcode for axes that might not be a machine as we see it
[19:27:16] <dmess> but axes all the same..
[19:27:46] <dmess> timers... switches... wait for's...
[19:28:21] <dmess> this machine is so sweet..
[19:30:50] <alex_joni> dmess: sure, emc2 could do that
[19:31:44] <dmess> handle the cell... transfer of pallets possibly an emc2 robot to move a part??
[19:33:33] <dmess> can 1 emc system talk to another??
[19:34:35] <alex_joni> dmess: you can set up interconnections
[19:34:39] <dmess> and work in conjunction?
[19:34:47] <dmess> ok.
[19:35:00] <alex_joni> have some ladder programmed so that it waits for inputs from the other part
[19:35:22] <dmess> is this too large a task to tackle???
[19:36:18] <alex_joni> dmess: if it's worth the $$ .. absolutely not :D
[19:36:23] <dmess> bcz my dream is a lights out aero-parts facility...
[19:37:00] <dmess> 4 aircraft a day.... all need landing gear...
[19:37:40] <dmess> 1.5 Million US for a 6 seater JET
[19:40:27] <alex_joni> dmess: how about light-out reconfigurable facility
[19:40:37] <alex_joni> feed in the CAD, it reconfigures itself :F
[19:40:38] <alex_joni> :D
[19:40:47] <dmess> http://www.tool-moldmaking.com/news/newsdetail.php?newsid=714
[19:41:07] <dmess> sure but let dream in reality too
[19:42:01] <dmess> there are 2300 sold aircraft and it just got FAA cert on july 27th
[19:42:55] <Lerneaen_Hydra> emco mecof?
[19:42:55] <Lerneaen_Hydra> some merger?
[19:42:55] <dmess> so now they NEED landing gear bcz ppl are waiting for thier plane..
[19:42:55] <Lerneaen_Hydra> isn't there a company called emco?
[19:42:55] <dmess> si
[19:43:04] <dmess> and mecof
[19:43:14] <Lerneaen_Hydra> http://www.emco.co.uk/
[19:43:37] <dmess> but no Mecof machines..
[19:44:10] <dmess> 3+2 axes.... and LARGER machines
[19:44:49] <dmess> tables from 2 m
[19:48:01] <Lerneaen_Hydra> oh btw, how well matured is the 3d printing market?
[19:48:26] <dmess> hmmm....
[20:02:34] <A-L-P-H-A> 'ohla.
[20:02:54] <A-L-P-H-A> off to the grocery store.
[20:06:36] <dmess> the potential for this endevor inournous.... it WILL live for 25-50 yrs..
[20:21:53] <Lerneaen_Hydra> 'lo again
[20:21:59] <Lerneaen_Hydra> err
[20:22:09] <Lerneaen_Hydra> logger_aj: bookmark
[20:22:09] <Lerneaen_Hydra> See
http://81.196.65.201/irc/irc.freenode.net:6667/emc/2006-08-26#T20-22-09
[20:22:33] <Lerneaen_Hydra> hmm, nothing new happening here
[20:22:39] <Lerneaen_Hydra> oh, there comes someone
[20:23:20] <Lerneaen_Hydra> and here comes someone else
[20:23:24] <Lerneaen_Hydra> nice
[20:23:42] <dmess> i'l keep quiet...
[20:24:37] <Lerneaen_Hydra> as long as you don't complain ;)
[20:24:38] <MichelG> Same for me
[20:24:38] <dmess> je suis joli today..
[20:25:03] <Lerneaen_Hydra> sehr gut ja
[20:25:30] <dmess> je ne comprenp pas..
[20:25:38] <dmess> and
[20:26:17] <Lerneaen_Hydra> jag sade att det var mycket bra
[20:26:26] <Lerneaen_Hydra> ;)
[20:26:38] <dmess> merci ; )
[20:34:24] <Lerneaen_Hydra> 'night
[20:43:19] <jepler> hi robin_sz
[20:44:22] <robin_sz> eveny
[20:44:53] <CIA-8> 03jepler 07HEAD * 10emc2/src/po/Submakefile: make sure the timestamp is updated when xgettext is run
[20:45:37] <alex_joni> hello
[20:46:04] <jepler> hi alex
[20:46:12] <alex_joni> hey jeff.. :)
[20:46:45] <robin_sz> today, I spent a couple of hours thinking about how to make HAL talk to a G2001 gecko board ... im still confused, but slightly more determined :)
[20:47:00] <alex_joni> robin_sz: 2 ways to make it work with emc
[20:47:16] <robin_sz> I did start soldering some bits together to convert the analogue 0-5v and direction logic signal into +-10v
[20:47:23] <alex_joni> 1. rewrite emccanon.cc to send canonical commands through USB to the gecko controller
[20:47:53] <alex_joni> 2. use the HAL way (each thingie on the gecko will be presented as HAL pins: step generators, encoder inputs, etc.)
[20:48:30] <alex_joni> #2 means you need to probably rewrite the inside of the g2001
[20:49:03] <alex_joni> #2 converts the gecko into a brainless thingie (emc will take care of PID, and all there's needed)
[20:49:13] <robin_sz> I was imgining servo loops and PID on the gecko, trajectory etc on the PC
[20:49:30] <alex_joni> that sounds like something inbetween
[20:49:40] <alex_joni> what do you want to feed to the gecko?
[20:49:44] <alex_joni> position commands?
[20:49:49] <robin_sz> uh huh
[20:50:26] <alex_joni> ok, might work.. but that means a lot of gecko config (PID values, max_steps, etc)
[20:50:35] <alex_joni> so you need also a way to send that stuff
[20:50:35] <robin_sz> steps?
[20:50:44] <alex_joni> or DAC
[20:50:46] <robin_sz> this is servos
[20:50:48] <robin_sz> indeed
[20:51:30] <alex_joni> scales for input, and so on
[20:51:30] <robin_sz> yeah
[20:51:40] <robin_sz> since it has encoder inputs and dacs, and enough power in the FPGA to run the PID loops real fast, seems a shame not to use them
[20:51:44] <alex_joni> do you have the G101 or older?
[20:51:56] <robin_sz> I have both :)
[20:52:04] <alex_joni> G101 might be interesting
[20:52:12] <alex_joni> it's the only one sold by Mariss currently
[20:52:13] <alex_joni> :D
[20:52:34] <robin_sz> I have the first hand soldered 101 :)
[20:57:26] <robin_sz> whatever, it kept me entertained for a hour or two :)
[21:02:59] <alex_joni> robin_sz: any idea what the difference between G901 and G902 is ?
[21:12:34] <robin_sz> mmm ... apart from one being for servo, the other for stepper? no.
[21:16:39] <alex_joni> I have lots for servo, was wondering if I can use them on a stepper
[21:16:56] <alex_joni> they kinda do the same thing..
[21:32:29] <A-L-P-H-A> wuzzup?
[21:48:29] <robin_sz> alex_joni, I should think so ...
[21:50:02] <alex_joni> I think I asked mariss once, but can't remember what he said :D
[21:50:23] <robin_sz> heh
[21:50:51] <robin_sz> * robin_sz watches movies of planes
[21:50:59] <alex_joni> hmm.. did you see G203V2 ?
[21:51:32] <robin_sz> the "vampire" drive?
[21:52:34] <alex_joni> yeah
[21:56:52] <robin_sz> coo ...
[21:56:54] <robin_sz> http://www.vereszoltan.hu/
[21:57:10] <alex_joni> hmm.. there seems to be a new version of the G320 in planning
[21:57:14] <alex_joni> also using a CPLD
[21:57:27] <robin_sz> if ever you get in a plane and someone says "wow, that was really bumpy/exciting/amazing flight" ...
[21:57:52] <robin_sz> that guy ^^ is mad, have a look in the "movies" section
[21:58:38] <robin_sz> Im sure in my flying lessons they said at least 3000 feet before doing silly things, not 6 feet.
[21:59:00] <robin_sz> yeah, the cplds are a good thing, the chips were running out for some of his designs
[21:59:36] <jmkasunich_> and RoHS (spit!) was going to kill the ones that weren't running out
[22:00:32] <jmkasunich_> nick jmkasunich
[22:00:35] <jmkasunich_> oops
[22:00:40] <jmkasunich_> jmkasunich_ is now known as jmkasunich
[22:01:24] <alex_joni> hi john
[22:01:27] <jmkasunich> hi
[22:03:57] <alex_joni> how's stuff?
[22:04:02] <jmkasunich> boring
[22:04:05] <alex_joni> any more of those boring meetings?
[22:04:06] <alex_joni> heh
[22:04:17] <jmkasunich> boring holes today
[22:04:33] <jmkasunich> I've been procrastinating on making these gearboxes
[22:04:59] <alex_joni> robin_sz: found my answer ..
[22:05:03] <alex_joni> robin_sz: "Simple. The G901 / G902 runs on 5VDC. The logic in the G201 works on
[22:05:03] <alex_joni> +12VDC while the logic in the G320 is +5VDC.
[22:05:05] <alex_joni> To accomodate both, the G901 carries a 78L05 +5VDC regulator."
[22:26:14] <MichelG> Hello! I am trying to add ndiswrapper to the 2.6.15-magma kernel, but when inserting, modprobe gives "FATAL: Error inserting ndiswrapper (/lib/modules/2.6.15-magma/misc/ndiswrapper.ko): Invalid module format". It seems that the package of kernel headers is not in phase with the kernel image. Any ideas? do I have to recompile a new kernel?
[22:26:57] <alex_joni> MichelG: no, you don't
[22:27:08] <alex_joni> but you shoud make sure you use the same compiler
[22:27:18] <alex_joni> and compile against the kernel headers
[22:27:28] <alex_joni> but I guess you did that.. what gcc do you use?
[22:30:30] <MichelG> ndiswraper MUST be compiled with gcc 3.4 or higher, so I downloaded and installed it. I suppose that the kernel has been compiled with 3.3; maybe this is the reason?
[22:30:42] <alex_joni> no, kernel was compiled with 4.0 ;)
[22:30:56] <alex_joni> MichelG: use "sudo apt-get build-dep emc2"
[22:31:13] <alex_joni> that way you get all the build deps for emc2, but also for the kernel
[22:31:33] <MichelG> OK, I am doing it and keep informed...
[22:31:39] <alex_joni> MichelG: sure
[22:36:00] <MichelG> apt-get: got error "E: Unable to find a source package for emc2"; but
http://dsplabs.cs.utt.ro/emc2/ is in apt/sources.list !!!! what's wrong????
[22:36:35] <alex_joni> MichelG: that's odd
[22:36:48] <alex_joni> do you have both lines with dsplabs in the sources list?
[22:37:01] <alex_joni> you should have one with deb
http://dsplabs...
[22:37:10] <alex_joni> and one with deb-src
http://dsplabs...
[22:37:33] <robin_sz> bah
[22:37:38] <robin_sz> poxy wireless notworkl
[22:37:49] <alex_joni> robin_sz: it works.. sometimes ;)
[22:38:02] <robin_sz> it used to be very good
[22:38:11] <robin_sz> but the cards keep losing connectivity
[22:38:34] <robin_sz> should I translate that for our American readers?
[22:38:41] <robin_sz> but the cards keep loosing connectivity
[22:38:56] <alex_joni> robin_sz: you need a HA2425TI-NF
[22:39:01] <robin_sz> I do?
[22:39:03] <jmkasunich> loosing is _not_ an Americanism
[22:39:04] <alex_joni> yes
[22:39:21] <alex_joni> robin_sz: google it ;)
[22:39:39] <robin_sz> jmkasunich, it is in a way. its wrong, but primarily it americans who get it wrong all the time for some reason I dont understand
[22:40:18] <alex_joni> robin_sz: found it?
[22:40:53] <robin_sz> heh
[22:40:59] <robin_sz> nice
[22:41:12] <alex_joni> too bad it's 4k$
[22:41:21] <robin_sz> ive got a 6W GaAsfet amp for 11 to 14ghz somewhere ...
[22:41:28] <jmkasunich> that buys a lot of Cat5 cable
[22:41:46] <alex_joni> jmkasunich: 25W amplifier for 2.4GHz
[22:42:01] <jmkasunich> I know - I looked
[22:42:03] <alex_joni> europe has a limit of 50mW on 2.4
[22:42:11] <robin_sz> would it work?
[22:42:15] <robin_sz> I mean ..
[22:42:22] <alex_joni> robin_sz: probably blast your ears off :D
[22:42:38] <alex_joni> I wouldn't wanna use it ..
[22:42:40] <robin_sz> what does wifi use for duplex? tdm?
[22:43:05] <jmkasunich> tin cans and string - inherently full duplex
[22:43:14] <alex_joni> some crazy collision avoidance protocol
[22:43:20] <alex_joni> with timeslots
[22:43:24] <robin_sz> right
[22:43:25] <robin_sz> tdm
[22:43:27] <alex_joni> kinda like old tokennet
[22:43:29] <alex_joni> :D
[22:43:51] <alex_joni> hmm.. I used to know this stuff :( but I don't anymore
[22:44:17] <alex_joni> robin_sz: I have a nice SMC for laptops (PRISM chipset, 100mW power)
[22:44:23] <robin_sz> nice
[22:44:36] <alex_joni> oh, and it has antenna connectors too ;)
[22:44:39] <MichelG> alex_joni: I added line "deb-src
http://dsplabs.cs.utt.ro/emc2/ dapper emc2" at end of sources.list, and now I get "E: Could not open file /var/lib/apt/lists/dsplabs.cs.utt.ro_emc2_dists_dapper_emc2_source_Sources - open (2 No such file or directory)". I don't know (nor understand...) the debian packaging system... :-(
[22:45:02] <alex_joni> MichelG: did you "sudo apt-get update" ?
[22:45:15] <alex_joni> that causes it to reload all server package lists
[22:45:17] <robin_sz> the one in the latop is fine, its the base thats useless... debian box, PCI->PCMCIA card, Lucent Orinoco POS>
[22:45:18] <robin_sz> .
[22:45:38] <alex_joni> ick.. used ad-hoc? or using host-ap ?
[22:45:44] <robin_sz> ad hoc
[22:45:52] <robin_sz> I think ...
[22:45:53] <alex_joni> than that's the problem
[22:45:57] <alex_joni> ad hoc is a PITA
[22:46:15] <robin_sz> how can I tell what mode it is?
[22:46:19] <alex_joni> _I_ would switch to the host-ap drivers
[22:46:33] <alex_joni> robin_sz: right click the connection thingie ? (lol)
[22:46:43] <robin_sz> err.
[22:46:44] <alex_joni> no idea really..
[22:46:46] <MichelG> Alex_joni: Bingo, downloading...
[22:47:01] <alex_joni> MichelG: good, that should get you gcc-4.0 amongst other stuff
[22:47:29] <alex_joni> MichelG: kernel headers and so on
[22:47:39] <alex_joni> but only if you don't already have it.. so it's safe to do
[22:48:05] <robin_sz> ahh,
[22:48:08] <alex_joni> MichelG: any idea why you had only one line in /etc/apt/sources.list ?
[22:48:09] <robin_sz> Mode: managed
[22:48:15] <alex_joni> ok, so not ad-hoc
[22:48:31] <MichelG> alex_joni: No problem, I have not tinkered with this kernel yet!
[22:49:08] <alex_joni> robin_sz:
http://hostap.epitest.fi/
[22:49:54] <alex_joni> robin_sz: even stuff to set up RADIUS there ;)
[22:50:05] <robin_sz> ick
[22:50:15] <robin_sz> I run with no access control and no encryption
[22:50:19] <alex_joni> These include support for IEEE 802.1X and dynamic WEP rekeying, RADIUS Accounting, RADIUS-based ACL for IEEE 802.11 authentication, minimal IAPP (IEEE 802.11f), WPA, IEEE 802.11i/RSN/WPA2.
[22:50:42] <alex_joni> normaly I use WEP(128 bit) and MAC filtering
[22:50:47] <alex_joni> safe enough for my needs
[22:50:53] <robin_sz> MAC filtereing?
[22:51:11] <robin_sz> how?
[22:51:12] <jmkasunich> only talk to known MAC addresses (NICs)?
[22:51:25] <alex_joni> jmkasunich: yeah
[22:51:28] <robin_sz> im aware of what it is, not how to set it up
[22:51:35] <alex_joni> any access point knows how to do that
[22:51:52] <robin_sz> ummm ... right
[22:52:08] <alex_joni> robin_sz: AP = Access Point (those boxes with antennas sticking out of them , and with an Eth sticking out the back) ;)
[22:52:22] <robin_sz> right .. well, if I had one, id ask it.
[22:52:22] <alex_joni> and I suspect you can always drop an iptables line
[22:52:34] <jmkasunich> AP also = a Linux box with a wireless card
[22:52:43] <robin_sz> I have that
[22:52:50] <alex_joni> iptables -A INPUT -m mac --mac-source 00:0F:EA:91:04:08 -j ACCEPT
[22:53:01] <robin_sz> uh huh
[22:53:11] <MichelG> alex_joni: iwconfig -> wlan0 :-) :-) now, just have to explain it to use tkip...
[22:53:12] <jmkasunich> alex: that simple?
[22:53:14] <jmkasunich> cool
[22:53:15] <alex_joni> jmkasunich: not any wireless card, only PRISM based with the host-ap drivers
[22:53:23] <alex_joni> MichelG: it worked?
[22:53:42] <alex_joni> jmkasunich: when was something around linux ever complicated?
[22:53:52] <jmkasunich> lol
[22:53:56] <jmkasunich> always?
[22:54:01] <alex_joni> lol.. yeah
[22:54:07] <alex_joni> but google is your friend :D
[22:54:13] <MichelG> alex_joni: don't know yet, but at least iwconfig finds it
[22:55:23] <alex_joni> MichelG: so it compiled & loaded ok.. nice one ;)
[22:55:36] <alex_joni> robin_sz: but then again it's easy to change the MAC :D
[22:55:37] <alex_joni> sudo su
[22:55:37] <alex_joni> ifconfig eth0 down
[22:55:37] <alex_joni> ifconfig eth0 hw ether 01:02:03:04:05:06
[22:55:37] <alex_joni> ifconfig eth0 up
[22:56:10] <jmkasunich> that assumes the attacker knows your mac, and he knows you are blocking by mac
[22:56:20] <alex_joni> the only problem is that one needs to connect to the AP, in order to listen to packets, and read the mac
[22:56:24] <jmkasunich> I guess he could sniff packets to get the max
[22:56:45] <alex_joni> and the AP drops the connection from bad MAC's
[22:56:58] <alex_joni> so it's a bit harder to do ;)
[22:57:40] <alex_joni> you need a wireless sniffer (one that doesn't connect to the AP), but logs packets as they come out through the ether
[22:58:20] <alex_joni> jmkasunich: but I guess this is always more fun then securing the connection:
http://www.ex-parrot.com/~pete/upside-down-ternet.html
[22:58:20] <jmkasunich> the equivalent of promiscuous mode
[22:58:55] <alex_joni> jmkasunich: right, but only a handfull of boards/driver combinations can do that
[23:00:19] <jmkasunich> heh, kittenwar is nice
[23:01:03] <alex_joni> lol
[23:02:53] <robin_sz> * robin_sz returns from going upstairs to flush the iptables
[23:03:06] <robin_sz> that didnt work then ;)
[23:03:19] <alex_joni> lol
[23:03:50] <alex_joni> robin_sz: I always use "reboot 10" before messing with iptables
[23:03:57] <alex_joni> if it works.. kill the reboot
[23:04:03] <alex_joni> if not.. it restores itself ;)
[23:04:39] <jepler> interesting idea
[23:05:03] <jepler> but why not 'echo command to restore tables | at now+10'
[23:05:33] <alex_joni> jepler: cause I had no idea of that ;)
[23:05:59] <alex_joni> probably a 'echo /etc/init.d/iptables restart | at now+10'
[23:06:07] <alex_joni> that's a keeper
[23:07:33] <alex_joni> heh.. the nicest thing I found today:
http://www.catb.org/~esr/faqs/smart-questions.html
[23:09:20] <MichelG> alex_joni: with "iwlist wlan0 scan", the card finds my AP and its ESSID :-). iwconfig supports only WEP. Do you know a tool which allows WPA / TKIP ?
[23:09:45] <alex_joni> MichelG:
http://www.catb.org/~esr/faqs/smart-questions.html#rtfm
[23:10:20] <alex_joni> MichelG: I am kidding..
[23:10:34] <alex_joni> but the answer was there (search the web as I did):
https://help.ubuntu.com/community/WifiDocs/WPAHowTo
[23:11:02] <MichelG> alex_joni: ;-)
[23:11:32] <alex_joni> "RTFM has a younger relative. If you get a reply that reads .STFW., the person who sent it thinks you should have Searched The Fucking Web. He or she is almost certainly right. Go search it. (The milder version of this is when you are told .Google is your friend!.)"
[23:11:52] <alex_joni> "You shouldn't be offended by this; by hacker standards, your respondent is showing you a rough kind of respect simply by not ignoring you. You should instead be thankful for this grandmotherly kindness."
[23:12:08] <alex_joni> ROFL.. this is great
[23:12:20] <jmkasunich> thats the first time you've seen it?
[23:14:19] <alex_joni> jmkasunich: oddly.. yes
[23:14:47] <alex_joni> maybe I got lucky so far, and wasn't sent there yet
[23:15:23] <MichelG> alex-joni: I usually play your side as I have to provide answers to everybody... this time I was very happy to find a guy better than me, and as I am VERY lazy, I played it the easy (and fastest) way. Thankx!
[23:16:22] <alex_joni> MichelG: I'm glad you got it working that fast
[23:16:42] <alex_joni> MichelG: and yes, we are used to people with far less idea asking in here ;)
[23:31:24] <alex_joni> hmm.. did you guys ever hear about elks?
[23:31:33] <alex_joni> http://elks.sourceforge.net/
[23:32:19] <robin_sz> like the largem several hundred pound deer like animal?
[23:32:20] <jmkasunich> hmmm
[23:32:32] <jmkasunich> thats what I thought at first
[23:32:37] <alex_joni> no, like software running on 8080
[23:33:18] <alex_joni> err.. 8086
[23:33:18] <jmkasunich> my second thought
http://en.wikipedia.org/wiki/Elks
[23:33:33] <alex_joni> ELKS is the Embeddable Linux Kernel Subset, a project to build a small kernel subset of Linux (which will provide more or less UNIX V7 functionality within the kernel) that can run on machines with limited processor and memory resources.
[23:33:58] <jmkasunich> need RTELKS to make it interesting
[23:39:47] <alex_joni> well.. 3am soon, good night all
[23:46:59] <robin_sz> night
[23:47:08] <robin_sz> 2am here ... I should be off too
[23:47:58] <jmkasunich> goodnight both of you
[23:48:29] <SWPadnos> yeah. good night. Hi. :)
[23:50:15] <MichelG> alex_joni: OK, the wifi card works perfectly; thanks a lot.
[23:50:27] <MichelG> alex_joni: On my previous system (BDI 4.38) I patched emc2 so that my digitizing probe works (15 line patch). I expect to get emc2 from cvs and do the patch again during next week. to who should I send the diffs?
{kind=link}