Back
[05:40:45] <dgarr> a minor patch:
http://www.panix.com/~dgarrett/stuff/0001-fix-typos-on-interp-messages.patch
[15:23:38] <Guest450> Guest450 is now known as skunkworks
[15:53:11] <CIA-81> EMC: 03cradek 07master * ra2312080c4c3 10/src/emc/iotask/ioControl.cc: Fix bogus prep when encountering Tn when n is already the loaded tool
[15:53:15] <CIA-81> EMC: 03cradek 07master * r3ff82254970c 10/src/emc/iotask/ioControl.cc: Merge branch 'toolchange-fixes'
[15:53:16] <CIA-81> EMC: 03cradek 07master * rb3a24b70a03d 10/src/emc/iotask/ioControl.cc: on nonrandom, eliminate tool load if that tool is already loaded
[15:53:17] <CIA-81> EMC: 03cradek 07v2.4_branch * r5519ebb239cc 10/src/emc/iotask/ioControl.cc: Merge branch 'toolchange-fixes' into v2.4_branch
[15:55:17] <jepler> cradek: you're now officially the expert on using merges to put a change on 2.4 and master
[15:55:36] <cradek> bleh
[15:56:24] <cradek> it's not hard, because I understand it, but it seems like a lot of steps
[18:27:30] <skunkworks> cradek: what is the motor on your lathe? is it this?
http://electronicsam.com/images/KandT/conversion/yservomaybe.JPG
[18:27:41] <skunkworks> spindle motor
[18:56:34] <cradek> no, it's just a 3ph single speed ac motor
[18:57:03] <skunkworks> ah - ok
[18:57:05] <skunkworks> thanks
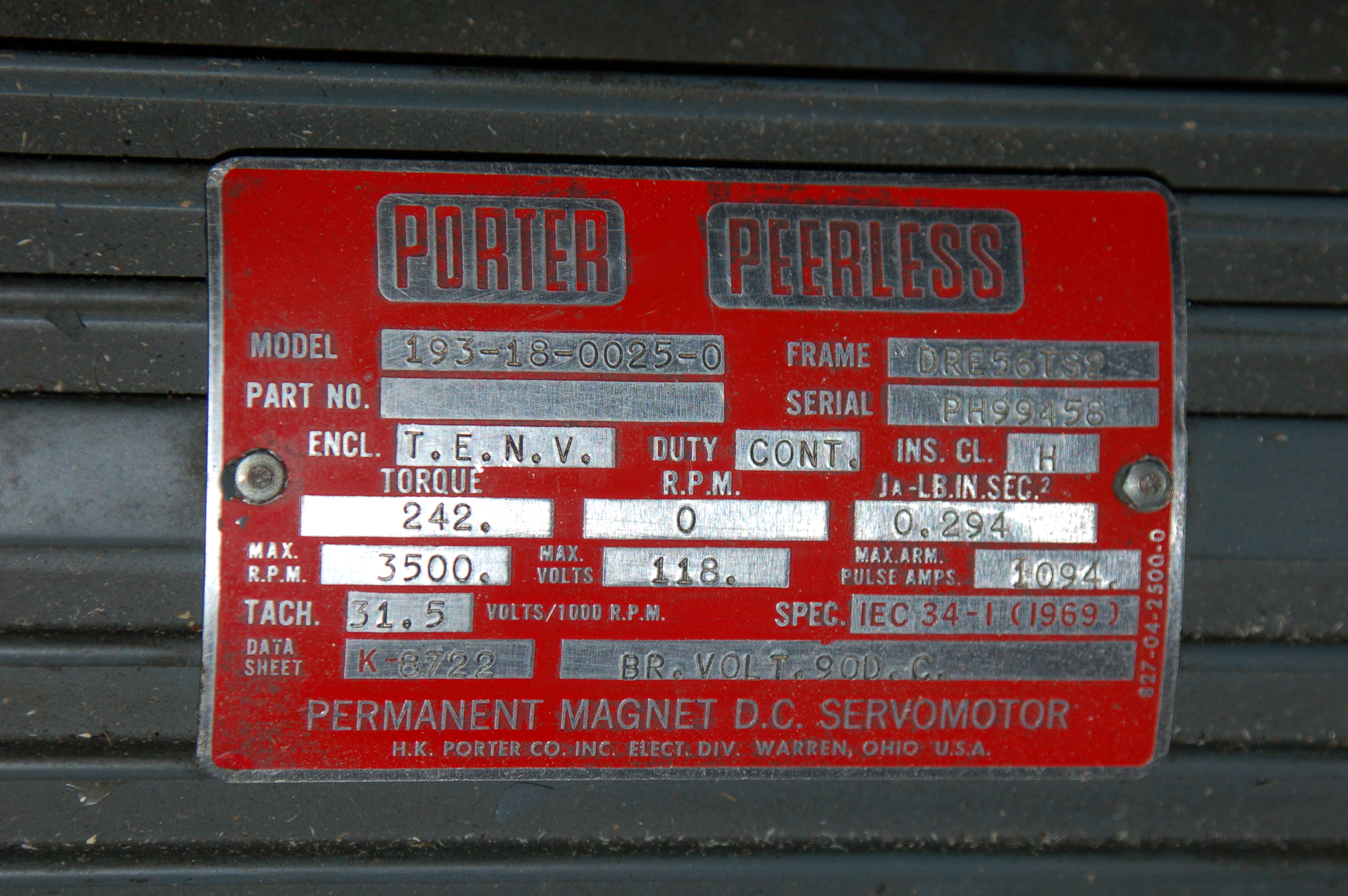
[18:57:56] <skunkworks> the specs on this thing are vauge.. We are thinking of using it for the y axis servo as it has a brake. (and is big enough if it works)
[19:15:14] <cradek> sure looks promising
[19:16:23] <cradek> I'm struggling to come up with something that might be in lb-in-sec2. do you know what Ja is?
[19:17:43] <SWPadnos> that is a crapload of current
[19:18:33] <cradek> > 100 kW
[19:24:07] <jepler> the internet suggests Jx stanrds for "moment of inertia of mass x", but that doesn't say what a is. armature?
[19:24:40] <cradek> yep I bet so
[19:24:49] <cradek> low armature mass means better acceleration
[19:28:15] <jepler> what are the units of torque? lb*ft*force?
[19:28:35] <SWPadnos> length * force
[19:29:01] <SWPadnos> (like a newton-meter)
[19:29:03] <cradek> well technically length * force, but in the US we use length * weight
[19:29:20] <cradek> here, ft lb is a torque
[19:29:29] <SWPadnos> that's only because we confuse weight with the force of that weight in a 1G gravity well :)
[19:29:42] <cradek> of course we do, we're here aren't we?
[19:29:52] <SWPadnos> yes. who are we?
[19:43:41] <ries> hehe.. gravity is not the same all over the planet...
[19:44:30] <ries> http://www.treehugger.com/earth-gravity-map.jpg
[19:45:28] <cradek> neat
[19:49:21] <ries> I think some dutchies launched a satellite and mapped it last year
[19:53:20] <skunkworks> sorry - was away. I assume the 242 is in-lbs - that comes out to around 20 ft-lbs cont.
[19:54:09] <skunkworks> I figured the jx... rating was an inertia rating also.
[19:54:49] <skunkworks> I like the max pulse amp rating..
[19:55:34] <skunkworks> I might just have to hook it up and measure it.
[21:06:12] <jepler> You can make the "start by stepping" bug much more obvious by specifying [TASK]INTERP_MAX_LEN=10
[21:07:01] <alex_joni> * alex_joni looks the other way
[21:07:20] <cradek> I was just going to go do something else, sorry
[21:10:23] <cradek> but seriously - I didn't know you could shorten the interplist - that'll help make it less tedious to work on
[21:10:44] <jepler> I only recall it because I recently read all the commits
[21:11:21] <cradek> I still think we should just ditch the interplist (but sadly not for 2.4 of course)
[21:13:05] <jepler> long ago axis just disabled the step button when the program wasn't running (so you couldn't start with step)
[21:13:08] <jepler> we should just put that back for 2.4..
[21:13:42] <cradek> I doubt that fixes it
[21:13:53] <cradek> I bet stepping from an M0 in the program would do it too
[21:19:32] <jepler> ctags-exuberant: Warning: ignoring null tag in emc/usr_intf/touchy/touchy.py
[21:24:12] <cradek> I don't get that...?
[21:24:16] <jepler> huh
[21:24:22] <jepler> I don't think I have any local edits left in that file
[21:26:10] <jepler> it's readahead_waiting that calls emcTaskPlanClose when the initial interp list empties
[21:34:18] <cradek> jepler:
http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?Git#Choose_an_appropriate_starting_point
[21:53:35] <jepler> I don't think I've tried to fix the step-from-start bug before, so here's my effort:
http://emergent.unpy.net/files/sandbox/0001-make-step-from-start-run-pause-not-run-step-pause.patch
[21:55:26] <alex_joni> jepler: tried the usual cases?
[21:55:45] <jepler> only a little bit
[21:55:47] <alex_joni> stop, step.. continue, pause, step ?
[22:12:01] <jepler> I guess I misunderstood how this works
[22:12:11] <jepler> I thought that I got to claim I fixed it, and then someone else would figure out how it didn't work
[22:12:20] <jepler> now you say I have to figure out whether it works?
[22:16:21] <alex_joni> well, at least feel confident it works ;)
[22:19:37] <alex_joni> http://sourceforge.net/tracker/?func=detail&aid=1680007&group_id=6744&atid=106744
[22:19:46] <alex_joni> I'd try that, if I had an emc2 running around here
[23:23:55] <ries> Hey Guys, I have a git question...
[23:24:17] <ries> I made modifications to the axis cide and wanting to create a patch, would it be fine if I compile/run the code from git?
[23:24:59] <ries> or should I do it differently? what I am trying to understand is, if I create a patch, would it also contain all other files the are created during compilation or just the modified code?
[23:36:59] <cradek> 'un
[23:37:07] <cradek> oops
[23:38:48] <cradek> ries: when you use git format-patch, you get a patch that when applied gives exactly your commit (code changes, log messages, authorship)
[23:39:02] <ries> great
[23:39:20] <ries> I hate to bug you again... trying prepare a patch, I need to patch against 2.5 pre, right?
[23:40:14] <cradek> if you did a git clone, you're on the master branch by default. you'd do 'git format-patch origin/master' to get patches for all commits you've made.
[23:41:07] <ries> ok...
[23:41:20] <cradek> bbl, hope you get it
[23:41:30] <ries> I will get there...
{kind=link}
{kind=link}