Table of Contents
NOTICE
As of 2011-01-16, the French version of the EMC2 documentation is 2 years out of date due to not having a translator available.
It’s recommended to use the English documentation whenever possible.
If you wish to provide updated French translation of EMC2, please contact us.
AVIS
Au 2011-01-16, la version française de la documentation EMC2 est de 2 ans à la date d'échéance pour ne pas avoir un traducteur disponible.
Il est recommandé d’utiliser la documentation en anglais chaque fois que possible.
Si vous souhaitez fournir des mises à jour traduction française d’EMC2, s’il vous plaît contactez-nous.
This handbook is a work in progress. If you are able to help with writing, editing, or graphic preparation please contact any member of the writing team or join and send an email to emc-users@lists.sourceforge.net.
Copyright (c) 2000-9 LinuxCNC.org
Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.1 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front-Cover Texts, and one Back-Cover Text: This EMC Handbook is the product of several authors writing for linuxCNC.org. As you find it to be of value in your work, we invite you to contribute to its revision and growth.A copy of the license is included in the section entitled GNU Free Documentation License. If you do not find the license you may order a copy from Free Software Foundation, Inc. 59 Temple Place, Suite 330 Boston, MA 02111-1307
HAL est le sigle de Hardware Abstraction Layer, le terme Anglais pour Couche d’Abstraction Matériel[1]. Au plus haut niveau, il s’agit simplement d’une méthode pour permettre à un grand nombre de “modules” d'être chargés et interconnectés pour assembler un système complexe. La partie “matériel” devient abstraite parce que HAL a été conçu à l’origine pour faciliter la configuration d’EMC pour une large gamme de matériels. Bon nombre de ces modules sont des pilotes de périphériques. Cependant, HAL peut faire beaucoup plus que configurer les pilotes du matériel.
HAL est basé sur le même principe que celui utilisé pour l'étude des circuits et des systèmes techniques, il va donc être utile d’examiner d’abord ces principes.
N’importe quel système, y compris les machines CNC, est fait de composants interconnectés. Pour les machines CNC, ces composants pourraient être le contrôleur principal, les amplis de servomoteurs, les amplis ou les commandes de puissance des moteurs pas à pas, les moteurs, les codeurs, les interrupteurs de fin de course, les panneaux de boutons de commande, les manivelles, peut être aussi un variateur de fréquence pour le moteur de broche, un automate programmable pour gérer le changeur d’outils, etc. Le constructeur de machine doit choisir les éléments, les monter et les câbler entre eux pour obtenir un système complet et fonctionnel.
Il ne sera pas nécessaire au constructeur de machine de se soucier du fonctionnement de chacun des organes, il les traitera comme des boîtes noires. Durant la phase de conception, il décide des éléments qu’il va utiliser, par exemple, moteurs pas à pas ou servomoteurs, quelle marque pour les amplis de puissance, quels types d’interrupteurs de fin de course et combien il en faudra, etc. La décision d’intégrer tel ou tel élément spécifique plutôt qu’un autre, repose sur ce que doit faire cet élément et sur ses caractéristiques fournies par le fabricant. La taille des moteurs et la charge qu’ils doivent supporter affectera le choix des interfaces de puissance nécessaires pour les piloter. Le choix de l’ampli affectera le type des signaux de retour demandés ainsi que le type des signaux de vitesse et de position qui doivent lui être transmis.
Dans le monde de HAL, l’intégrateur doit décider quels composants de HAL sont nécessaires. Habituellement, chaque carte d’interface nécessite un pilote. Des composants supplémentaires peuvent être demandés, par exemple, pour la génération logicielle des impulsions d’avance, les fonctionnalités des automates programmables, ainsi qu’une grande variété d’autres tâches.
Le créateur d’un système matériel, ne sélectionnera pas seulement les éléments, il devra aussi étudier comment ils doivent être interconnectés. Chaque boîte noire dispose de bornes, deux seulement pour un simple contact, ou plusieurs douzaines pour un pilote de servomoteur ou un automate. Elles doivent être câblées entre elles. Les moteurs câblés à leurs interfaces de puissance, les fins de course câblés au contrôleur et ainsi de suite. Quand le constructeur de machine commence à travailler sur le câblage, il crée un grand plan de câblage représentant tous les éléments de la machine ainsi que les connections qui les relient entre eux.
En utilisant HAL, les composants sont interconnectés par des signaux . Le concepteur peut décider quels signaux sont nécessaires et à quoi ils doivent être connectés.
Une fois que le plan de câblage est complet, il est possible de construire la machine. Les pièces sont achetées et montées, elles peuvent alors être câblées et interconnectées selon le plan de câblage. Dans un système physique, chaque interconnection est un morceau de fil qui doit être coupé et raccordé aux bornes appropriées.
HAL fournit un bon nombre d’outils d’aide à la “construction” d’un système HAL. Certains de ces outils permettent de “connecter” (ou déconnecter) un simple “fil”. D’autres permettent d’enregistrer une liste complète des organes, du câblage et d’autres informations à propos du système, de sorte qu’il puisse être “reconstruit” d’une simple commande.
Très peu de machines marchent bien dès la première fois. Lors des tests, le technicien peut utiliser un appareil de mesure pour voir si un fin de course fonctionne correctement ou pour mesurer la tension fournie aux servomoteurs. Il peut aussi brancher un oscilloscope pour examiner le réglage d’une interface ou pour rechercher des interférences électriques et déterminer leurs sources. En cas de problème, il peut s’avérer indispensable de modifier le plan de câblage, peut être que certaines pièces devront être recâblées différemment, voir même remplacées par quelque chose de totalement différent.
HAL fournit les équivalents logiciels du voltmètre, de l’oscilloscope, du générateur de signaux et les autres outils nécessaires à la mise au point et aux réglages d’un système. Les même commandes utilisées pour construire le système, seront utilisées pour faire les changements indispensables.
Ce document est destiné aux personnes déjà capables de concevoir ce type de réalisation matérielle, mais qui ne savent pas comment connecter le matériel à EMC.
La conception de matériel, telle que décrite précédemment, s’arrête à l’interface de contrôle. Au delà, il y a un tas de boîtes noires, relativement simples, reliées entre elles pour faire ce qui est demandé. À l’intérieur, un grand mystère, c’est juste une grande boîte noire qui fonctionne, nous osons l’espérer.
HAL étend cette méthode traditionnelle de conception de matériel à l’intérieur de la grande boîte noire. Il transforme les pilotes de matériels et même certaines parties internes du matériel, en petites boîtes noires pouvant être interconnectées, elles peuvent alors remplacer le matériel externe. Il permet au “plan de câblage” de faire voir une partie du contrôleur interne et non plus, juste une grosse boîte noire. Plus important encore, il permet à l’intégrateur de tester et de modifier le contrôleur en utilisant les mêmes méthodes que celles utilisées pour le reste du matériel.
Les termes tels que moteurs, amplis et codeurs sont familiers aux intégrateurs de machines. Quand nous parlons d’utiliser un câble extra souple à huit conducteurs blindés pour raccorder un codeur de position à sa carte d’entrées placée dans l’ordinateur. Le lecteur comprend immédiatement de quoi il s’agit et se pose la question, “quel type de connecteurs vais-je devoir monter de chaque côté de ce câble ?” Le même genre de réflexion est indipensable pour HAL mais le cheminement de la pensée est différent. Au début les mots utilisés par HAL pourront sembler un peu étranges, mais ils sont identiques au concept de travail évoluant d’une connection à la suivante.
HAL repose sur une seule idée, l’idée d'étendre le plan de câblage à l’intérieur du contrôleur. Si vous êtes à l’aise avec l’idée d’interconnecter des boîtes noires matérielles, vous n’aurez sans doute aucune difficulté à utiliser HAL pour interconnecter des boites noires logicielles.
Cette section est un glossaire qui définit les termes clés de HAL mais il est différent d’un glossaire traditionnel en ce sens que les termes ne sont pas classés par ordre alphabétique. Ils sont classés par leur relation ou par le sens du flux à l’intérieur de HAL.
- Component
- : (Composant) Lorsque nous avons parlé de la conception du matériel, nous avons évoqué les différents éléments individuels comme "pièces", "modules", "boîtes noires", etc. L'équivalent HAL est un "component" ou "HAL component". (ce document utilisera: "HAL component" quand la confusion avec un autre type de composant est possible, mais normalement, utilisez juste: "component".) Un HAL component est une pièce logicielle avec, bien définis, des entrées, des sorties, un comportement, qui peuvent éventuellement être interconnectés.
- Parameter
- : (Paramètre) De nombreux composants matériels ont des réglages qui ne sont raccordés à aucun autre composant mais qui sont accessibles. Par exemple, un ampli de servomoteur a souvent des potentiomètres de réglage et des points tests sur lesquels on peut poser une pointe de touche de voltmètre ou une sonde d’oscilloscope pour visualiser le résultat des réglages. Les HAL components aussi peuvent avoir de tels éléments, ils sont appelés "parameters". Il y a deux types de paramètres: “Input parameters” qui sont des équivalents des potentiomètres. Ce sont des valeurs qui peuvent être réglées par l’utilisateur, elles gardent leur valeur jusqu'à un nouveau réglage. “Output parameters” qui ne sont pas ajustables. Ils sont équivalents aux points tests qui permettent de mesurer la valeur d’un signal interne.
- Pin
- : (Broche) Les composants matériels ont des broches qui peuvent être interconnectées entre elles. L'équivalent HAL est une "pin" ou "HAL pin". ("HAL pin" est utilisé quand c’est nécessaire pour éviter la confusion.) Toutes les HAL pins sont nommées et les noms des pins sont utilisés lors des interconnexions entre elles. Les HAL pins sont des entités logicielles qui n’existent qu'à l’intérieur de l’ordinateur.
- Physical_Pin
- : (Broche physique) La plupart des interfaces d’entrées/sorties ont des broches physiques réelles pour leur connection avec l’extérieur, par exemple, les broches du port parallèle. Pour éviter la confusion, elles sont appelées "physical_pins". Ce sont des repères pour faire penser au monde physique réel. Vous vous demandez peut être quelle relation il y a entre les HAL_pins, les Physical_pins et les éléments extérieurs comme les codeurs ou une carte stg. Nous avons ici, affaire à des interfaces de type translation/conversion de données.
- Signal
- : Dans une machine physique réelle, les terminaisons des différents organes sont reliées par des fils. L'équivalent HAL d’un fil est un "signal" ou "HAL signal". Ces signaux connectent les “HAL pins” entre elles comme le requiert le concepteur de la machine. Les “HAL signals” peuvent être connectés et déconnectés à volonté (même avec la machine en marche).
- Type
: Quand on utilise un matériel réel, il ne viendrait pas à l’idée de connecter la sortie 24V d’un relais à l’entrée analogique +/-10V de l’ampli d’un servomoteur. Les “HAL pins” ont les même restrictions, qui sont fondées sur leur type. Les “pins” et les “signals” ont tous un type, un “signals” ne peux être connecté qu'à une “pins” de même type. Il y a actuellement les 4 types suivants:
- bit - une simple valeur vraie ou fausse TRUE/FALSE ou ON/OFF
- float - un flottant de 32 bits, avec approximativement 24 bits de résolution et plus de 200 bits d'échelle dynamique.
- u32 - un entier non signé de 32 bits, les valeurs légales vont de 0 à +4294967295
- s32 - un entier signé de 32 bits, les valeurs légales vont de -2147483648 à +2147483647
- Function
- : (Fonction) Les composants matériels réels ont tendance à réagir immédiatement à leurs signaux d’entrée. Par exemple, si la tension d’entrée d’un ampli de servo varie, la sortie varie aussi automatiquement. Les composants logiciels ne peuvent pas réagir immédiatement. Chaque composant a du code spécifique qui doit être exécuté pour faire ce que le composant est sensé faire. Dans certains cas, ce code tourne simplement comme une partie du composant. Cependant dans la plupart des cas, notamment dans les composants temps réel, le code doit être exécuté selon un ordre bien précis et à des intervalles trés précis. Par exemple, les données en entrée doivent d’abord être lues avant qu’un calcul ne puisse être effectué sur elles et les données en sortie ne peuvent pas être écrites tant que le calcul sur les données d’entrée n’est pas terminé. Dans ces cas, le code est confié au système sous forme de "functions". Chaque “function” est un bloc de code qui effectue une action spécifique. L’intégrateur peut utiliser des "threads" pour combiner des séries de “functions” qui seront exécutées dans un ordre particulier et selon des intervalles de temps spécifiques.
- Thread
- : (Fil) Un "thread" est une liste de “functions” qui sont lancées à intervalles spécifiques par une tâche temps réel. Quand un “thread” est créé pour la première fois, il a son cadencement spécifique (période), mais pas de “functions”. Les “functions” seront ajoutées au “thread” et elle seront exécutées dans le même ordre, chaque fois que le “tread” tournera.
Prenons un exemple, supposons que nous avons un composant de port parallèle nommé “hal_parport”. Ce composant défini une ou plusieurs “HAL pins” pour chaque “physical pin”. Les “pins” sont décrites dans ce composant, comme expliqué dans la section “component“de cette doc, par: leurs noms, comment chaque “pin” est en relation avec la “physical pin”, est-elle inversée, peut-on changer sa polarité, etc. Mais ça ne permet pas d’obtenir les données des “HAL pins” aux “physical pins”. Le code est utilisé pour faire ça, et c’est la où les “functions” entrent en oeuvre. Le composant parport nécessite deux “functions”: une pour lire les broches d’entrée et mettre à jour les “HAL pins”, l’autre pour prendre les données des “HAL pins” et les écrire sur les broches de sortie “physical pins”. Ce deux fonctions font partie du pilote “hal_parport”.
Chaque composant HAL est un morceau de logiciel avec, bien définis, des entrées, des sorties et un comportement. Ils peuvent être installés et interconnectés selon les besoins. Cette section liste certains des composants actuellement disponibles et décrit brièvement ce que chacun fait. Les détails complets sur chacun seront donnés plus loin dans ce document.
- motion
- Un module temps réel qui accepte les commandes de mouvement en NML et inter-agit avec HAL
- iocontrol
- Un module d’espace utilisateur qui accepte les commandes d’entrée/sortie (I/O) en NML et inter-agit avec HAL
- classicladder
- Un automate programmable en langage à contacts utilisant HAL pour les entrées/sorties (I/O)
- halui
- Un espace de utilisateur de programmation qui inter-agit avec HAL et envoie des commandes NML, Il est destiné à fonctionner comme une interface utilisateur en utilisant les boutons et interrupteurs externes.
- stepgen
- Générateur d’impulsions de pas avec boucle de position.
- encoder
- Codeur/compteur logiciel.
- pid
- Boucle de contrôle Proportionnelle/Intégrale/Dérivée.
- siggen
- Générateur d’ondes: sinusoïdale/cosinusoïdale/triangle/carrée, pour la mise au point.
- supply
- Une simple alimentation, pour la mise au point
- blocks
- Un assortiment de composants (mux, demux, or, and, integ, ddt, limit, wcomp, etc.)
- hal_ax5214h
- Un pilote pour la carte d’entrées/sorties Axiom Measurement & Control AX5241H
- hal_m5i20
- Un pilote pour la carte Mesa Electronics 5i20
- hal_motenc
- Un pilote pour la carte Vital Systems MOTENC-100
- hal_parport
- Pilote pour le(ou les) port(s) parallèle(s).
- hal_ppmc
- Un pilote pour la famille de contrôleurs Pico Systems (PPMC, USC et UPC)
- hal_stg
- Un pilote pour la carte Servo To Go (versions 1 & 2)
- hal_vti
- Un pilote pour le contrôleur Vigilant Technologies PCI ENCDAC-4
Chacun de ces modules est décrit en détail dans les chapitres suivants.
Cette première introduction au concept de HAL peut être un peu déconcertante pour l’esprit. Construire quelque chose avec des blocs peut être un défi, pourtant certains jeux de construction avec lesquels nous avons joué étant enfants peuvent nous aider à construire un système HAL.
Je regardais mon fils et sa petite fille de six ans construire une tour à partir d'une boîte pleine de blocs de différentes tailles, de barres et de pièces rondes, des sortes de couvercles. L'objectif était de voir jusqu'où la tour pouvait monter. Plus la base était étroite plus il restait de pièces pour monter. Mais plus la base était étroite, moins la tour était stable. Je les voyais étudier combien de blocs ils pouvaient poser et où ils devaient les poser pour conserver l'équilibre avec le reste de la tour.
La notion d’empilage de cartes pour voir jusqu’où on peut monter est une très vieille et honorable manière de passer le temps. En première lecture, l’intégrateur pourra avoir l’impression que construire un HAL est un peu comme ça. C’est possible avec une bonne planification, mais l’intégrateur peut avoir à construire un système stable aussi complexe qu’une machine actuelle l’exige.
1.4.2. Erector Sets [2] (Meccano en France)
C'était une grande série de boites de construction en métal, des tôles perforées, plates ou en cornières, toutes avaient des trous régulierements espacés. Vous pouviez concevoir des tas de choses et les monter avec ces éléments maintenus entre eux par des petits boulons.
J'ai eu ma première boîte Erector pour mon quatrième anniversaire. Je sais que la boîte était prévue pour des enfants beaucoup plus agés que moi. Peut être que mon père se faisait vraiment un cadeau à lui même. J'ai eu une période difficile avec les petites vis et les petits écrous. J'ai vraiment eu envie d'avoir quatre bras, un pour visser avec le tournevis, un pour tenir la vis, les pièces et l'écrou. En persévérant, de même qu'en agaçant mon père, j'ai fini par avoir fait tous les montages du livret. Bientôt, je lorgnais vers les plus grandes boîtes qui étaient imprimées sur ce livret. Travailler avec ces pièces de taille standard m'a ouvert le monde de la construction et j'ai bientôt été au delà des projets illustrés.
Les composants Hal ne sont pas tous de même taille ni de même forme mais ils permettent d'être regroupés en larges unités qui feront bien du travail. C’est dans ce sens qu’ils sont comme les pièces d’un jeu Erector. Certains composants sont longs et minces. Ils connectent essentiellement les commandes de niveau supérieur aux “physical pins”. D’autres composants sont plus comme les plateformes rectangulaires sur lesquelles des machines entières pourraient être construites. Un intégrateur parviendra rapidement au delà des brefs exemples et commencera à assembler des composants entre eux d’une manière qui lui sera propre.
1.4.3. Tinkertoys [3]
Le jouet en bois Tinkertoys est plus humain que l'acier froid de l'Erector. Le coeur de la construction avec TinkerToys est un connecteur rond avec huit trous équidistants sur la circonférence. Il a aussi un trou au centre, perpendiculaire aux autres trous répartis autour du moyeu.
Les moyeux pouvaient être connectés avec des tiges rondes de différentes longueurs. Le constructeur pouvait faire une grosse roue à l'aide de rayons qui partaient du centre.
Mon projet favori était une station spaciale rotative. De courtes tiges rayonnaient depuis les trous du moyeu central et étaient connectées avec d'autres moyeux aux extrémités des rayons. Ces moyeux extérieurs étaient raccordés entre eux avec d'autres rayons. Je passais des heures à rêver de vivre dans un tel dispositif, marchant de moyeu en moyeu et sur la passerelle extérieure qui tournait lentement à cause de la gravité dans l'espace en état d'apesanteur. Les provisions circulaient par les rayons et les ascenceurs qui les transféraient dans la fusée arrimée sur le rayon central pendant qu'on déchargeait sa précieuse cargaison.
L’idée qu’une “pin” ou qu’un “component” est la plaque centrale pour de nombreuses connections est aussi une notion facile avec le HAL. Les exemples deux à quatre (voir section [cha:Tutoriel-HAL]) connectent le multimètre et l’oscilloscope aux signaux qui sont prévus pour aller ailleurs. Moins facile, la notion d’un moyeu pour plusieurs signaux entrants. Mais, c’est également possible avec l’utilisation appropriée des fonctions dans ce composant de moyeu qui manipulent les signaux quand ils arrivent, venant d’autres composants.
Une autre réflexion qui vient à partir de ce jouet mécanique est une représentation de “HAL threads”. Un “thread” pourrait ressembler un peu à un chilopode, une chenille, ou un perce-oreille. Une épine dorsale, des “HAL components”, raccordés entre eux par des tiges, les “HAL signals”. Chaque composant prend dans ses propres paramètres et selon l'état de ses broches d’entrée, les passe sur ses broches de sortie à l’intention du composant suivant. Les signaux voyagent ainsi de bout en bout, le long de l'épine dorsale où ils sont ajoutés ou modifiés par chaque composant son tour venu.
Les “Threads” sont tous synchronisés et exécutent une série de tâches de bout en bout. Une représentation mécanique est possible avec Thinkertoys si on pense à la longueur du jouet comme étant la mesure du temps mis pour aller d’un bout à l’autre. Un thread, ou épine dorsale, très différent est créé en connectant le même ensemble de modules avec des tiges de longueur différente. La longueur totale de l'épine dorsale peut aussi être changée en jouant sur la longueur des tiges pour connecter les modules. L’ordre des opérations est le même mais le temps mis pour aller d’un bout à l’autre est très différent.
1.4.4. Un exemple en Lego[4]
Lorsque les blocs de Lego sont arrivés dans nos magasins, ils étaient à peu près tous de la même taille et de la même forme. Bien sûr il y avait les demi taille et quelques uns en quart de taille mais tous rectangulaires. Les blocs de Lego se relient ensembles en enfonçant les broches mâles d’une pièce dans les trous femelles de l’autre. En superposant les couches, les jonctions peuvent être rendues très solides, même aux coins et aux tés.
J'ai vu mes enfants et mes petits-enfants construire avec des pièces Lego (les mêmes Lego). Il y en a encore quelques milliers dans une vieille et lourde boîte en carton qui dort dans un coin de la salle de jeux. Ils sont stockés dans cette boîte car c'était trop long de les ranger et de les ressortir à chacune de leur visite et ils étaient utilisés à chaque fois. Il doit bien y avoir les pièces de deux douzaines de boîtes différentes de Lego. Les petits livrets qui les accompagnaient ont été perdus depuis longtemps, mais la magie de la construction avec l'imbrication de ces pièces toutes de la même taille est quelque chose à observer.
Contrairement aux modèles physiques du câblage entre les boîtes noires sur lequel, nous l’avons dit, HAL est basé, il suffit de relier deux broches avec un signal hal, on est loin de l’action physique.
La vraie logique à relais consiste en relais connectés ensembles, quand un relais s’ouvre ou se ferme, le courant passe (ou s’arrête) immédiatement. D’autres bobines peuvent changer d'état etc. Dans le style langage à contacts d’automate comme le Ladder ça ne marche pas de cette façon. Habituellement dans un Ladder simple passe, chaque barreau de l'échelle est évalué dans l’ordre où il se présente et seulement une fois par passe. Un exemple parfait est un simple Ladder avec un contact en série avec une bobine. Le contact et la bobine actionnent le même relais.
Si c'était un relais conventionnel, dès que la bobine est sous tension, le contact s’ouvre et coupe la bobine, le relais retombe etc. Le relais devient un buzzer.
Avec un automate programmable, si la bobine est OFF et que le contact est fermé quand l’automate commence à évaluer le programme, alors à la fin de la passe, la bobine sera ON. Le fait que la bobine ouvre le contact qui la prive de courant est ignoré jusqu'à la prochaine passe. À la passe suivante, l’automate voit que le contact est ouvert et désactive la bobine. Donc, le relais va battre rapidement entre on et off à la vitesse à laquelle l’automate évalue le programme.
Dans HAL, c’est le code qui évalue. En fait, la version Ladder HAL temps réel de ClassicLadder exporte une fonction pour faire exactement cela. Pendant ce temps, un thread exécute les fonctions spécifiques à intervalle régulier. Juste comme on peut choisir de régler la durée de la boucle de programme d’un automate programmable à 10ms, ou à 1 seconde, on peut définir des “HAL threads” avec des périodes différentes.
Ce qui distingue un thread d’un autre n’est pas ce qu’il fait mais quelles fonctions lui sont attachées. La vraie distinction est simplement combien de fois un thread tourne.
Dans EMC on peut avoir un thread à 50s et un thread à 1ms. En se basant sur les valeurs de BASE_PERIOD et de SERVO_PERIOD. Valeurs fixées dans le fichier ini.
La prochaine étape consiste à décider de ce que chaque thread doit faire. Certaines de ces décisions sont les mêmes dans (presque) tous les systèmes emc. Par exemple, le gestionnaire de mouvement est toujours ajouté au servo-thread.
D’autres connections seront faites par l’intégrateur. Il pourrait s’agir de brancher la lecture d’un codeur par une carte STG à un DAC pour écrire les valeurs dans le servo thread, ou de brancher une fonction stepgen au base-thread avec la fonction parport pour écrire les valeurs sur le port.
La configuration passe de la théorie à la pratique de HAL. Pour ceux qui ont juste un peu de pratique avec la programmation des ordinateurs, cette section est le “Hello World” de HAL. Comme indiqué précédemment halrun peut être utilisé pour créer un système qui fonctionne. Il s’agit d’un outil de configuration et de mise au point en ligne de commande ou en fichier texte. Les exemples suivants illustrent son installation et son fonctionnement.
Les exemples en ligne de commande sont représentés en police bold
typewriter. Les réponses de l’ordinateur sont en police typewriter.
Le texte optionnel est entre crochets [comme ça]. Le texte <comme
ça> représente un champ qui peut prendre différentes valeurs, le
paragraphe adjacent explique quelles sont les valeurs appropriées. Les
élements textuels séparés par des barres verticales indiquent qu’une
valeur ou l’autre mais pas les deux, doit être présente. Toutes les
lignes de commandes considèrent que vous êtes dans le répertoire
emc2/ , les chemins sont affichés en accord avec ce principe.
Votre version de halcmd peut inclure la complétion avec la touche tab. Au lieu de compléter les noms de fichiers comme le fait un shell, il complète les commandes avec les identifiants HAL. Essayez de presser la touche tab après le début d’une commande HAL:
halcmd: *loa<TAB>* + halcmd: *load* + halcmd: *loadrt* + halcmd: *loadrt deb<TAB>* + halcmd: *loadrt debounce*
RTAPI est le sigle de Real Time Application Programming Interface. De nombreux composants HAL travaillent en temps réel et tous les composants de HAL stockent leurs données dans la mémoire partagée, de sorte que les composants temps réel puissent y accéder. Normalement, Linux ne prend pas en charge les programmes temps réel ni le type de mémoire partagée dont HAL a besoin. Heureusement, il existe des systèmes d’exploitation temps réel RTOS qui fournissent les extensions nécessaires à Linux. Malheureusement, chaque RTOS fait les choses différemment des autres.
Pour remédier à ces différences, l'équipe d’EMC a proposé RTAPI, qui
fournit une manière cohérente aux programmes de parler au RTOS. Si vous
êtes un programmeur qui veut travailler à l’intérieur d’EMC, vous
pouvez étudier emc2/src/rtapi/rtapi.h pour comprendre l’API. Mais si
vous êtes une personne normale, tout
ce que vous avez besoin de savoir à propos de RTAPI est qu’il doit être
(avec le RTOS) chargé dans la mémoire de votre ordinateur avant de
pouvoir faire n’importe quoi avec HAL.
Pour ce tutoriel, nous allons supposer que vous avez installé avec
succés le CD-Live ou que vous avez compilé correctement l’arborescence
emc2/src. Si nécessaire, invoquez le script «emc-environment» pour
préparer votre shell. Dans ce cas, tout ce que vous avez à faire
est de charger le RTOS requis et les modules RTAPI dans la mémoire.
Tapez juste les commandes suivantes dans une console:
~$ *cd emc2* + ~/emc2$ *halrun +*halcmd:
Avec l’OS temps réel et RTAPI chargés, vous pouvez passer au premier exemple. Notez que le prompt a changé, il est passé de “$” à “halcmd:”. La raison en est que les commandes ultérieures seront interprétées comme des commandes HAL et non plus comme des commandes shell.
Pour le premier exemple, nous allons utiliser un composant HAL appelé
siggen , qui est un simple générateur de signal. Une description
complète du
composant siggen reste disponible à la section ??? de
ce document. Il
s’agit d’un composant temps réel, mis en oeuvre comme un module du
noyau Linux. Pour charger siggen utiliser la commande de HAL,
loadrt:
halcmd: *loadrt siggen*
Maintenant que le module est chargé, il faut introduire halcmd ,
l’outil en ligne de commande utilisé pour configurer le HAL. Pour
une description plus complète essayez: man halcmd, ou consultez la
section halcmd à la section [sec:Halcmd] de ce document. La
première commande de
halcmd et show, qui affichera les informations concernant l'état actuel
du HAL. Pour afficher tout ce qui est installé tapez:
halcmd:* show comp* + Loaded HAL Components: + ID Type Name PID State + 3 RT siggen ready + 2 User halcmd10190 10190 ready
Puisque halcmd lui même est un composant HAL, il sera toujours
présent dans la
liste. Le nombre après halcmd dans la liste des composants est le
“process ID”. Il est toujours possible de lancer plus d’une instance de
halcmd en même temps (dans différentes fenêtres par exemple), Le numéro
PID est ajouté à la fin du nom pour rendre celui-ci unique. La liste
montre aussi le composant siggen que nous avions installé à l'étape
précédente. Le “RT” sous “Type”
indique que siggen est un composant temps réel.
Ensuite, voyons quelles pins siggen rend disponibles:
halcmd:* show pin* +
Component Pins: +
Owner Type Dir Value Name +
3 float IN 1 siggen.0.amplitude +
3 float OUT 0 siggen.0.cosine +
3 float IN 1 siggen.0.frequency +
3 float IN 0 siggen.0.offset +
3 float OUT 0 siggen.0.sawtooth +
3 float OUT 0 siggen.0.sine +
3 float OUT 0 siggen.0.square +
3 float OUT 0 siggen.0.triangleCette commande affiche toutes les pins présentes dans le HAL. Un
système complexe peut avoir plusieurs dizaines ou centaines de pins.
Mais pour le moment il y a seulement huit pins. Toutes ces huit pins
sont des flottants, elles transportent toutes des données en provenance
du composant siggen . Puisque nous n’avons pas encore exécuté le code
contenu dans le
composant, certaines pins ont une valeur de zéro.
L'étape suivante consiste à examiner les paramètres:
halcmd:* show param* +
Parameters: +
Owner Type Dir Value Name +
3 s32 RO 0 siggen.0.update.time +
3 s32 RW 0 siggen.0.update.tmaxLa commande “show param” affiche tous les paramètres de HAL. Pour le
moment chaque paramètre à la valeur par défaut attribuée quand le
composant a été chargé. Notez dans la colonne Dir, les paramètres
marqués -W sont en écriture possible, pour ceux qui ne sont jamais
modifiés par
le composant lui-même, mais qui sont modifiables par l’utilisateur pour
contrôler le composant. Nous verrons comment plus tard. Les paramètres
marqués R- sont en lecture seule. Il ne peuvent être modifiés que
par le
composant. Finalement, les paramètres marqués RW sont en
lecture/écriture. Ils peuvent être modifiés par le composant
et aussi par l’utilisateur. Nota: les paramètres
siggen.0.update.time et siggen.0.update.tmax existent dans un but
de déboguage, ils ne sont pas couverts par cette
documentation.
Les paramètres thread.time et thread.tmax sont associés avec le thread
créé quand le composant a été chargé. Quand la réécriture de HAL sera
terminée, le thread ne sera plus créé à ce stade, de sorte que ces
paramètres ne seront plus visibles.
Il n’y a pas de thread créé ici, mais il y a quand même les paramètres siggen.0.update.{time,tmax}.
Les paramètres de thread sont ceux du composant 02, le module siggen. C’est incorrect, ils devraient être ceux du module hal_lib, parce que le thread lui même n’est plus la propriété de siggen, et en fait, si siggen est retiré, les paramètres devraient rester.
Et bien en fait, “fixer” les paramètres de thread aura pris plus de temps que je ne pensais. Donc, je les ai éliminés pour l’instant. Quand la réécriture de HAL sera terminée, je les remettrai.
La plupart des composants temps réel exportent une ou plusieurs
fonctions pour que le code qu’elles contiennent soit exécuté en temps
réel. Voyons ce que la fonction siggen exporte:
halcmd: *show funct* + Exported Functions: + Owner CodeAddr Arg FP Users Name + 32769 b7f74ac5 b7d0c0b4 YES 0 siggen.0.update
Le composant siggen exporte une seule fonction. Il nécessite un flottant (Floating Point). Il n’est lié à aucun thread, puisque “users” est à zero[5].
Pour faire tourner le code actuellement contenu dans la fonction
siggen.0.update, nous avons besoin d’un thread temps réel. C’est le
composant appelé threads qui est utilisé pour créer le nouveau
thread. Créons un thread appelé test-thread avec une période de 1ms
(1000000ns):
halcmd: *loadrt threads name1=test-thread period1=1000000*
Voyons si il fonctionne:
halcmd: *show thread +*Realtime Threads: +
Period FP Name (Time, Max-Time) +
999849 YES test-thread ( 0, 0 )Il fonctionne. La période n’est pas exactement de 1000000ns à cause des limitations dues au matériel, mais nous avons bien un thread qui tourne à une période approximativement correcte et qui peut manipuler des fonctions en virgule flottante. La prochaine étape sera de connecter la fonction au thread:
halcmd: *addf siggen.0.update test-thread*
Pour le moment nous avions utilisé halcmd seulement pour regarder
le HAL. Mais cette fois-ci, nous avons
utilisé la commande addf (add function) pour changer quelque chose
dans le HAL. Nous avons dit
à halcmd d’ajouter la fonction siggen.0.update au thread
test-thread et la commande suivante indique qu’il a réussi:
halcmd: *show thread +*Realtime Threads: +
Period FP Name (Time, Max-Time) +
999849 YES test-thread ( 0, 0 ) +
1 siggen.0.updateIl y a une étape de plus avant que le composant siggen ne commence
à générer des signaux. Quand le HAL est démarré pour la
première fois, les threads ne sont pas en marche. C’est pour vous
permettre de compléter la configuration du système avant que le code
temps réel ne démarre. Une fois que vous êtes satisfait de la
configuration, vous pouvez lancer le code temps réel comme ceci:
halcmd: *start*
Maintenant le générateur de signal est en marche. Regardons ses pins de sortie:
halcmd: *show pin* +
Component Pins: +
Owner Type Dir Value Name +
3 float IN 1
siggen.0.amplitude +
3 float OUT -0.9406941 siggen.0.cosine +
3 float IN 1
siggen.0.frequency +
3 float IN 0 siggen.0.offset +
3 float OUT -0.1164055 siggen.0.sawtooth +
3 float OUT 0.379820 siggen.0.sine +
3 float OUT -1 siggen.0.square +
3 float OUT -0.7728110 siggen.0.trianglehalcmd: *show pin* +
Component Pins: +
Owner Type Dir Value Name +
3 float IN 1
siggen.0.amplitude +
3 float OUT 0.9958036 siggen.0.cosine +
3 float IN 1
siggen.0.frequency +
3 float IN 0
siggen.0.offset +
3 float OUT 0.9708287 siggen.0.sawtooth +
3 float OUT -0.09151597 siggen.0.sine +
3 float OUT 1 siggen.0.square +
3 float OUT 0.9416574 siggen.0.triangleNous avons fait, très rapidement, deux commandes show pin et vous
pouvez voir que les sorties ne sont plus à zéro. Les sorties
sinus, cosinus, dents de scie et triangle changent constamment. La
sortie carrée fonctionne également, mais elle passe simplement de +1.0
à -1.0 à chaque cycle.
La réelle puissance de HAL est de permettre de modifier les choses.
Par exemple, on peut utiliser la commande setp pour ajuster la
valeur d’un paramètre. Modifions l’amplitude du
signal de sortie du générateur de 1.0 à 5.0:
halcmd: *setp siggen.0.amplitude 5* + emc2$
Voyons encore une fois les paramètres et les pins:
halcmd: *show param* +
Parameters: +
Owner Type Dir Value Name +
3 s32 RO 397 siggen.0.update.time +
3 s32 RW 109100 siggen.0.update.tmaxhalcmd: *show pin* +
Component Pins: +
Owner Type Dir Value Name +
3 float IN 5
siggen.0.amplitude +
3 float OUT -4.179375 siggen.0.cosine +
3 float IN 1
siggen.0.frequency +
3 float IN 0
siggen.0.offset +
3 float OUT 0.9248036 siggen.0.sawtooth +
3 float OUT -2.744599 siggen.0.sine +
3 float OUT 5 siggen.0.square +
3 float OUT -3.150393 siggen.0.triangleNotez que la valeur du paramètre siggen.0.amplitude est bien passée
à 5.000 et que les pins ont maintenant des valeurs
plus grandes.
La plupart de ce que nous avons fait jusqu’ici avec halcmd a été de
simplement regarder les choses avec la commande show . Toutefois,
deux commandes ont rééllement modifié des valeurs. Au fur
et à mesure que nous concevons des systèmes plus complexes avec HAL,
nous allons utiliser de nombreuses commandes pour le configurer comme
nous le souhaitons. HAL a une mémoire d'éléphant et peut retenir sa
configuration jusqu'à ce qu’il s’arrête. Mais qu’en est-il de la
prochaine fois ? Nous ne voulons pas entrer une série de commande à
chaque fois que l’on veut utiliser le système. Nous pouvons enregistrer
la configuration de l’ensemble de HAL en une seule commande:
halcmd:* save* + # components + loadrt threads name1=test-thread period1=1000000 + loadrt siggen + # pin aliases + # signals + # nets + # parameter values + setp siggen.0.update.tmax 14687 + # realtime thread/function links + addf siggen.0.update test-thread
La sortie de la commande save est une séquence de commandes HAL. Si
vous commencez par un HAL
“vide” et que vous tapez toute la séquence de commandes HAL, vous aurez
la configuration qui existait lors de l’exécution de la commande
save . Pour sauver ces commandes pour une utilisation ultérieure,
nous
allons simplement rediriger la sortie vers un fichier:
halcmd: *save all saved.hal +*halcmd: *exit +*~/emc2$
Pour restaurer la configuration de HAL stockée dans saved.hal , nous
avons besoin d’exécuter toutes ces commandes HAL. Pour ce
faire, nous utiliserons la commande -f <filename> qui lit les
commandes à partir d’un fichier, le -I qui affichera le prompt halcmd
après l’exécution des commandes:
~/emc2$ *halrun -I -f saved.hal*
Notez qu’il n’y a pas de commande start dans le fichier saved.hal. Il est nécessaire de la retaper (ou d'éditer saved.hal pour l’ajouter):
halcmd: *start +*halcmd: *exit +*~/emc2$
Vous pouvez construire des systèmes HAL vraiment complexes sans utiliser d’interface graphique. Mais il y a quelque chose de rassurant à visualiser le résultat du travail. Le premier, et le plus simple des outils graphiques pour le HAL, est “halmeter”. C’est un programme très simple qui s’utilise comme un multimètre.
Nous allons utiliser de nouveaux éléments du composant siggen pour vérifier halmeter. Si vous avez fini l’exemple précédent, alors siggen est déjà chargé. Sinon, on peut charger tout comme nous l’avons fait précédemment:
~/emc2$ *halrun +*halcmd: *loadrt siggen +*halcmd: *loadrt threads name1=test-thread period1=1000000 +*halcmd: *addf siggen.0.update test-thread +*halcmd:* start +*halcmd:* setp siggen.0.amplitude 5*
À ce stade, nous avons chargé le composant siggen qui est en cours d’exécution. Nous pouvons lancer halmeter. Puisque halmeter est une application graphique, X doit être actif.
halcmd: *loadusr halmeter*
Dans le même temps, une fenêtre s’ouvre sur votre écran, demandant de sélectionner le signal à observer [cap:HAL-Meter-Fenetre-selection].
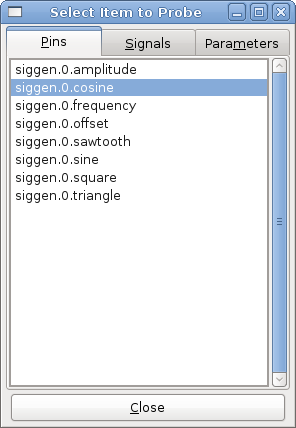
Fenêtre de sélection de HAL Meter. Ce dialogue contient trois onglets. Le premier onglet affiche toutes
les HAL pins du système. La seconde affiche tous les signaux et le
troisième affiche tous les paramètres. Si nous voulons analyser la pin
siggen.0. cosine en premier, il suffit de cliquer sur elle puis sur
le bouton
Close. Le dialogue de sélection se ferme et la mesure s’affiche,
quelque chose comme sur la figure [cap:Halmeter].
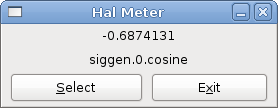
Pour modifier ce qui est affiché sur Hal meter pressez le bouton "Select" qui vous raménera à la fenêtre de sélection précédente.
Vous devriez voir la valeur évoluer puisque siggen génére une onde cosinusoïdale. Halmeter raffraîchi son affichage environ 5 fois par seconde.
Pour éteindre halmeter, cliquer sur le bouton exit.
Pour visualiser plusieurs pins, signaux ou paramètres en même temps, il est possible d’ouvrir plusieurs halmeters. La fenêtre de halmeter est intentionnellement petite justement pour permettre d’en ouvrir un grand nombre sur le même écran.
Jusqu'à maintenant, nous avons chargé un composant HAL. Mais l’idée générale de HAL est de vous permettre de charger et de relier un grand nombre de composants pour en faire un système complexe. Le prochain exemple va utiliser deux composants.
Avant de mettre en place ce nouvel exemple, nous allons commencer par un petit nettoyage. Si vous avez fini l’un des exemples précédents, il faut supprimer tous les composants et ensuite recharger la RTAPI et les librairies de HAL en faisant:
halcmd: *exit +*~/emc2$ *halrun*
Maintenant, nous allons charger le composant générateur d’impulsions. Pour l’instant, nous pouvons nous passer des détails et exécuter les commandes suivantes:[6]
Dans cet exemple nous utiliserons le type de contrôle "velocity" du composant stepgen.
halrun: *loadrt stepgen step_type=0,0 ctrl_type=v,v +*halcmd: *loadrt siggen +*halcmd: *loadrt threads name1=fast fp1=0 period1=50000 name2=slow period2=1000000*
La première commande charge deux générateurs d’impulsions, configurés pour générer des impulsions de type 0. La seconde commande charge notre vieil ami siggen et la troisième crée deux threads, un rapide (fast) avec une période de 50 us et un lent avec une période de 1ms. Le thread rapide ne prend pas en charge les fonctions à virgule flottante (fp1=0).
Comme précédemment, on peut utiliser halcmd show pour jeter un coup
d’oeil à HAL. Cette fois, nous aurons beaucoup
plus de pins et de paramètres que précédemment:
halcmd:* show pin +*Component Pins: +
Owner Type Dir Value Name +
3 float IN 1 siggen.0.amplitude +
3 float OUT 0 siggen.0.cosine +
3 float IN 1 siggen.0.frequency +
3 float IN 0 siggen.0.offset +
3 float OUT 0 siggen.0.sawtooth +
3 float OUT 0 siggen.0.sine +
3 float OUT 0 siggen.0.square +
3 float OUT 0 siggen.0.triangle +
3 float OUT 0 stepgen.0.counts +
2 bit OUT FALSE stepgen.0.dir +
2 bit IN FALSE stepgen.0.enable +
2 float IN 0 stepgen.0.position-fb +
2 float OUT 0 stepgen.0.step +
2 bit OUT FALSE stepgen.0.velocity-cmd +
2 s32 OUT 0 stepgen.1.counts +
2 bit OUT FALSE stepgen.1.dir +
2 bit IN FALSE stepgen.1.enable +
2 float IN 0 stepgen.1.position-fb +
2 float OUT 0 stepgen.1.step +
2 bit OUT FALSE stepgen.1.velocity-cmdhalcmd:* show param +*Parameters: +
Owner Type Dir Value Name +
3 s32 RO 0
siggen.0.update.time +
3 s32 RW 0
siggen.0.update.tmax +
2 u32 RW 00000001 stepgen.0.dirhold +
2 u32 RW 00000001 stepgen.0.dirsetup +
2 float RO 0
stepgen.0.frequency +
2 float RW 0
stepgen.0.maxaccel +
2 float RW 0
stepgen.0.maxvel +
2 float RW 1
stepgen.0.position-scale +
2 s32 RO 0
stepgen.0.rawcounts +
2 u32 RW 00000001 stepgen.0.steplen +
2 u32 RW 00000001 stepgen.0.stepspace +
2 u32 RW 00000001 stepgen.1.dirhold +
2 u32 RW 00000001 stepgen.1.dirsetup +
2 float RO 0
stepgen.1.frequency +
2 float RW 0
stepgen.1.maxaccel +
2 float RW 0
stepgen.1.maxvel +
2 float RW 1
stepgen.1.position-scale +
2 s32 RO 0
stepgen.1.rawcounts +
2 u32 RW 00000001 stepgen.1.steplen +
2 u32 RW 00000001 stepgen.1.stepspace +
2 s32 RO 0
stepgen.capture-position.time +
2 s32 RW 0
stepgen.capture-position.tmax +
2 s32 RO 0
stepgen.make-pulses.time +
2 s32 RW 0
stepgen.make-pulses.tmax +
2 s32 RO 0
stepgen.update-freq.time +
2 s32 RW 0
stepgen.update-freq.tmaxNous avons donc deux générateurs d’impulsions de pas et un générateur
de signaux. Maintenant, nous allons créer des signaux HAL pour
connecter ces trois composants. Nous allons faire comme si nous
pilotions les axes X et Y d’une machine avec nos générateurs
d’impulsions de pas. Nous voulons déplacer la table en ronds. Pour ce
faire, nous allons envoyer un signal cosinusoïdal à l’axe des X et un
signal sinusoïdal à l’axe des Y. Le module siggen créera le sinus et le
cosinus, mais nous aurons besoin de “fils” pour connecter les modules
ensemble. Dans le HAL, les “fils” sont appelés signaux. Nous devons en
créer deux. Nous pouvons les appeler comme on veut, pour cet exemple il
y aura X-vel et Y-vel. Le signal X-vel partira de la sortie
cosinus du générateur de signal et arrivera sur
l’entrée “velocity” du premier générateur d’impulsions de pas. La
première étape consiste à connecter le signal à la sortie du générateur
de signaux. Pour connecter un signal à une pin, nous utilisons la
commande net:
halcmd: *net X-vel <= siggen.0.cosine*
Pour voir l’effet de la commande net, regardons les signaux:
halcmd: *show sig* +
ignals: +
Type Value Name +
float 0.00000e+00 X_vel +
<== siggen.0.cosineQuand un signal est connecté à une ou plusieurs pins, la commande
«show» liste les pins immédiatement suivies par le nom du signal.
Les
flèches donnent la direction du flux de données, dans ce cas, le flux
va de la pin siggen.0.cosine vers le signal X-vel. Maintenant,
connectons X-vel à l’entrée “velocity” du générateur d’impulsions de
pas:
halcmd: *net X-vel => stepgen.0.velocity-cmd*
On peut aussi connecter l’axe Y au signal Y-vel . Il doit partir de
la sortie sinus du générateur de signal pour
arriver sur l’entrée du second générateur d’impulsions de pas. La
commande suivante fait en une ligne, la même chose que les deux
commandes net précédentes ont fait pour X-vel:
halcmd: *net Y-vel siggen.0.sine => stepgen.1.velocity-cmd*
Pour voir l’effet de la commande net, regardons encore les signaux et les pins:
halcmd:* show sig* +
Signals: +
Type Value Name (linked to) +
float 0 X-vel +
<== siggen.0.cosine +
==>
stepgen.0.velocity-cmd +
float 0 Y-vel +
<== siggen.0.sine +
==>
stepgen.1.velocity-cmdLa commande «show sig» montre clairement comment les flux de
données circulent dans HAL. Par
exemple, le signal` X-vel` provient de la pin siggen.0.cosine et va
vers la pin stepgen.0.velocity-cmd.
Penser à ce qui circule dans les “fils” rend les pins et les signaux assez faciles à comprendre. Les threads et les fonctions sont un peu plus difficiles. Les fonctions contiennent des instructions pour l’ordinateur. Les threads sont les méthodes utilisées pour faire exécuter ces instructions quand c’est nécessaire. Premièrement, regardons les fonctions dont nous disposons:
halcmd: *show funct +*Exported Functions: + Owner CodeAddr Arg FP Users Name + 00004 d8a3a120 d8bd322c YES 0 siggen.0.update + 00003 d8bf45b0 d8bd30b4 YES 0 stepgen.capture-position + 00003 d8bf42c0 d8bd30b4 NO 0 stepgen.make-pulses + 00003 d8bf46b0 d8bd30b4 YES 0 stepgen.update-freq
En règle générale, vous devez vous référer à la documentation de
chaque composant pour voir ce que font ses fonctions. Dans notre
exemple, la fonction siggen.0.update est utilisée pour mettre à jour
les sorties du générateur de signaux.
Chaque fois qu’elle est exécutée, le générateur recalcule les valeurs
de ses sorties sinus, cosinus, triangle, carrée. Pour générer un signal
régulier, il doit fonctionner à des intervalles bien spécifiques.
Les trois autres fonctions sont relatives au générateur d’impulsions de pas:
La première, stepgen.capture-position , est utilisée pour un retour
de position. Elle capture la valeur d’un
compteur interne qui compte les impulsions qui sont générées. S’il n’y
a pas de perte de pas, ce compteur indique la position du moteur.
La fonction principale du générateur d’impulsions est
stepgen.make-pulses. Chaque fois que make-pulses démarre elle
décide qu’il est temps de faire un pas, si oui il fixe
les sorties en conséquence. Pour des pas plus doux, il doit fonctionner
le plus souvent possible. Parce qu’il a besoin de fonctionner de
manière rapide, make-pulses est hautement optimisé et n’effectue
que quelques calculs.
Contrairement aux autres, il n’a pas besoin de virgule flottante pour
ses calculs.
La dernière fonction, stepgen.update-freq , est responsable de
l'échelle et de quelques autres calculs qui ne
doivent être effectués que lors d’une commande de changement de
fréquence.
Pour notre exemple nous voulons faire tourner siggen.0.update avec
une vitesse de calcul des valeurs sinus et cosinus modérée.
Immédiatement après, nous lançons stepgen.0.update. Nous voulons
lancer freqgen.update-freq pour charger les nouvelles valeurs dans
le générateur d’impulsions.
Finalement nous lancerons` stepgen.make-pulses` aussi vite que
possible pour des pas plus doux. Comme nous
n’utilisons pas de retour de position, nous n’avons pas besoin de
lancer stepgen.capture-position.
Nous lançons les fonctions en les ajoutant aux threads. Chaque thread va à une vitesse spécifique. Regardons de quels threads nous disposons:
halcmd: *show thread* +
Realtime Threads: +
Period FP Name +
1005720 YES slow ( 0, 0 ) +
50286 NO fast ( 0, 0 )Les deux threads ont été créés lorsque nous les avons chargés. Le
premier, slow , tourne toutes les millisecondes, il est capable
d’exécuter des
fonctions en virgule flottante (FP). Nous l’utilisons pour
s`iggen.0.update` et stepgen.update-freq. Le deuxième thread est
fast , il tourne toutes les 50 microsecondes, il ne prend pas en
charge les
calculs en virgule flottante. Nous l’utilisons pour
stepgen.make-pulses . Pour connecter des fonctions au bon thread,
nous utilisons la
commande addf. Nous spécifions la fonction en premier suivie par le
thread:
halcmd: *addf siggen.0.update slow* + halcmd: *addf stepgen.update-freq slow* + halcmd: *addf stepgen.make-pulses fast*
Après avoir lancé ces commandes, nous pouvons lancer la commande show
thread une nouvelle fois pour voir ce qui ce passe:
halcmd: *show thread +*Realtime Threads: +
Period FP Name (Time,
Max-Time) +
988960 YES slow ( 0,
0 ) +
1 siggen.0.update +
2 stepgen.update-freq +
49448 NO fast ( 0,
0 ) +
1 stepgen.make-pulsesMaintenant, chaque thread est suivi par les noms des fonctions, dans l’ordre dans lequel les fonctions seront exécutées.
Nous sommes presque prêts à démarrer notre système HAL. Mais il faut
auparavant régler quelques paramètres. Par défaut le composant siggen
génère des signaux qui varient entre +1 et -1. Pour notre exemple,
c’est très bien, nous voulons que la vitesse de la table varie de +1 à
-1 pouce par seconde. Toutefois, l'échelle du générateur d’impulsions
de pas n’est pas bonne. Par défaut, il génère une fréquence de sortie
de 1 pas par seconde avec une capacité de 1000. Il est fort improbable
qu’un pas par seconde nous donne une vitesse de déplacement de la table
d’un pouce par seconde. Supposons que notre vis fasse 5 tours par
pouce, couplée à un moteur pas à pas de 200 pas par tour et une
interface qui fournit 10 micropas par pas. Il faut donc 2000 pas pour
faire un tour de vis et 5 tours pour faire un pouce. Ce qui signifie
que notre montage utilisera 10000 pas par pouce. Nous avons besoin de
multiplier la vitesse d’entrée à l'étape générateur d’impulsions par
10000 pour obtenir la bonne valeur. C’est exactement pour cela
qu’existe le paramètre stepgen.n.velocity-scale . Dans notre cas, les
axes X et Y ont la même échelle et nous pouvons
passer les deux paramètres à 10000:
halcmd:* setp stepgen.0.position-scale 10000 +*halcmd:* setp stepgen.1.position-scale 10000 +*halcmd: *setp stepgen.0.enable 1* + halcmd: *setp stepgen.1.enable 1*
Cela signifie que, avec la pin stepgen.0.velocity-cmd à 1.000 et le
générateur réglé pour 10000 impulsions par seconde
(10kHz), avec le moteur et la vis décrits précédemment, nos axes auront
une vitesse de déplacement de exactement 1.000 pouce par seconde. Cela
illustre une notion clé du concept de HAL, des éléments comme les
échelles étant au plus bas niveau possible, dans notre exemple le
générateur d’impulsions de pas, le signal interne X_vel est celui
de la vitesse de déplacement de la table en pouces par
seconde. Les autres composants comme siggen ne savent rien du tout
à propos de l'échelle des autres. Si on change
de vis, ou de moteur, il n’y a qu’un seul paramètre à changer,
l'échelle du générateur d’impulsions de pas.
Nous avons maintenant tout configuré et sommes prêts à démarrer. Tout
comme dans le premier exemple, nous utilisons la commande start:
halcmd: *start*
Bien que rien ne semble se produire, à l’intérieur de l’ordinateur les impulsions de pas sont présentes sur la sortie du générateur, variant entre 10kHz dans un sens et 10kHz dans l’autre à chaque seconde. Dans la suite de ce tutoriel, nous allons voir comment convertir ces signaux internes des moteurs dans le monde réel, mais nous allons d’abord les examiner pour voir ce qui se passe.
L’exemple précédent génère certains signaux très intéressants. Mais beaucoup de ce qui se passe est beaucoup trop rapide pour être vu avec halmeter. Pour examiner de plus près ce qui se passe à l’intérieur de HAL, il faudrait un oscilloscope. Heureusement HAL en a un, appelé halscope.
Halscope comporte deux parties, une partie en temps réel qui est chargée comme un module de noyau et une partie utilisateur qui fournit l’interface graphique et l’affichage. Cependant, vous n’avez pas à vous inquiéter à ce sujet car l’interface demandera automatiquement que la partie temps réel soit chargée:
halcmd: *loadusr halscope*
La fenêtre graphique du scope s’ouvre, immédiatement suivie par un dialogue “Realtime function not linked” visible sur la figure [fig:function-not-linked].
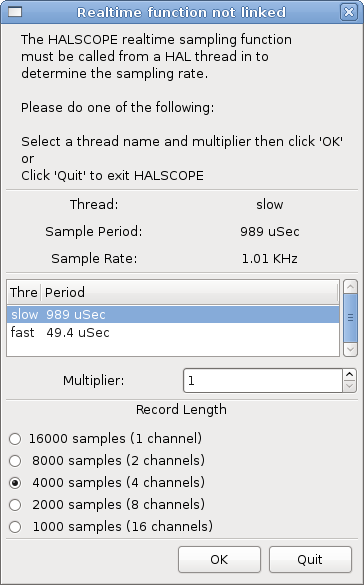
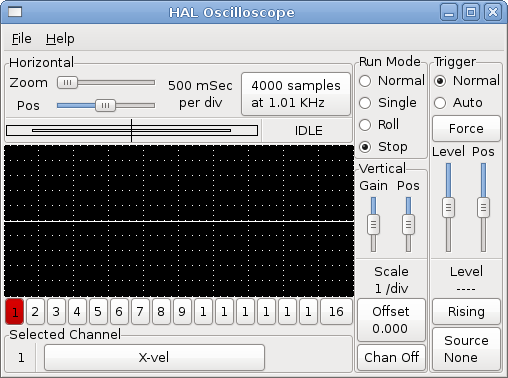
Dialogue“Realtime function not linked”. Ce dialogue est l’endroit où vous définissez le taux d'échantillonnage de l’oscilloscope. Pour le moment nous voulons un échantillon par milliseconde, alors cliquez sur le thread “slow” et laissez le multiplicateur à 1. Nous allons aussi passer la longueur d’enregistrement à 4000 samples (échantillons), de sorte que nous puissions utiliser jusqu'à 4 voies simultanément. Quand vous sélectionnez un thread puis que vous cliquez sur le bouton “OK”, le dialogue disparaît et la fenêtre du scope affiche quelque chose comme sur la figure [fig:Fenetre-initiale-Halscope].
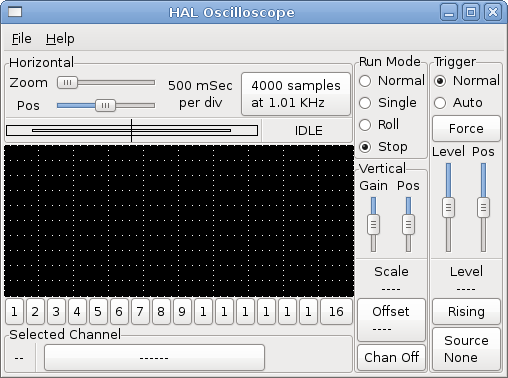
Fenêtre initiale du scope. À ce stade, Halscope est prêt à l’emploi. Nous avons déjà choisi le taux d'échantillonnage et la longueur d’enregistrement, de sorte que la prochaine étape consiste à décider de ce qu’il faut mesurer. C’est équivalent à brancher les “sondes virtuelles du scope” à HAL. Halscope dispose de 16 voies, mais le nombre de voies utilisables à un moment donné dépend de la longueur d’enregistrement, plus il y a de voies, plus les enregistrements doivent être courts, car la mémoire disponible pour l’enregistrement est fixée à environ 16000 échantillons.
Les boutons des voies se situent en dessous de l'écran du scope. Cliquez le boutton “1” et vous verrez apparaître le dialogue de sélection “Select Channel Source”, pour sélectionner le signal à afficher sur la voie 1, comme sur la figure [fig:Selection-sources-Halscope]. Ce dialogue est très similaire à celui utilisé par Halmeter.
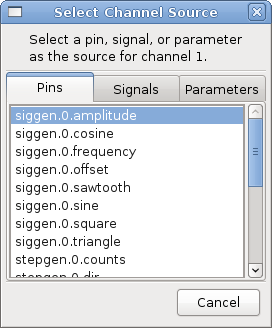
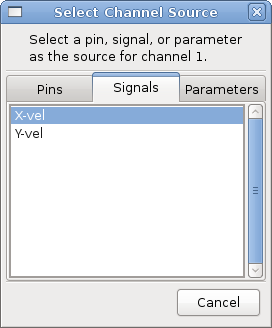
Dialogue de sélection des sources. Nous aimerions bien regarder les signaux que nous avons défini précédemment, pour cela, cliquons sur l’onglet “Signals” et le dialogue affichera tous les signaux existants dans le HAL (seulement deux dans notre exemple). [cap:Select-Signal]
Pour choisir un signal, il suffit de cliquer dessus. Dans notre cas, nous voulons utiliser la voie 1 pour afficher le signal ‘` X-vel''. Lorsque l'on clique sur `` X-vel’', la fenêtre se ferme et le canal a été sélectionné.
Le bouton de la voie 1 est pressé, le numéro de la voie 1 et le nom ‘` X-vel’' apparaissent sous la rangée de boutons. L’affichage indique toujours la voie sélectionnée, vous pouvez avoir beaucoup de voies sur l'écran, mais celle qui est active sera en surbrillance.
Les différents contrôles comme la position verticale et l’amplitude sont toujours relatifs à la voie 1. Pour ajouter un signal sur la voie 2, cliquer sur le bouton "2'. Dans la fenêtre de dialogue, cliquer sur l’onglet "Signals', puis cliquer sur ‘` Y-vel’'.
Nous voulons aussi voir les signaux carrés et triangles produits. Il n’existe pas de signaux connectés à ces pins, nous utilisons donc l’onglet ‘`Pins”. Pour le canal 3, sélectionnez `` siggen.0.triangle’' et pour le canal 4, choisissez ‘` siggen.0.square’'.
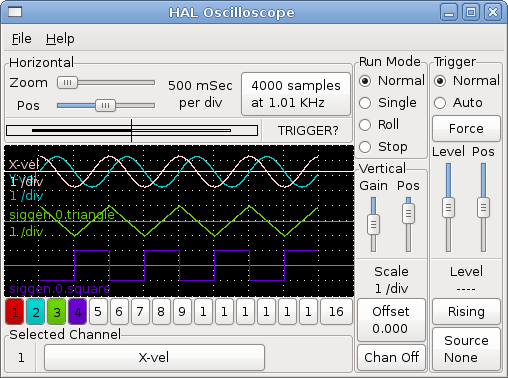
Maintenant que nous avons plusieurs sondes branchées sur HAL, il est temps de capturer quelques formes d’ondes. Pour démarrer le scope, cochez la case "Normal'' du groupe ‘`run mode'' (en haut à droite). Puisque nous avons une longueur d'enregistrement de 4000 échantillons et une acquisition de 1000 échantillons par seconde, il faudra à halscope environ 2 secondes pour remplir la moitié de son tampon. Pendant ce temps, une barre de progression juste au-dessus de l'écran principal affichera le remplissage du tampon. Une fois que le tampon est à moitié plein, scope attend un déclencheur. Puisque nous n'en avons pas encore configuré, il attendra toujours. Pour déclencher manuellement, cliquez sur le bouton "Force'' du groupe `` Trigger’' en haut à droite. Vous devriez voir le reste de la zone tampon se remplir, puis l'écran afficher les ondes capturées. Le résultat ressemble à la figure [fig:Capture-onde-Halscope].
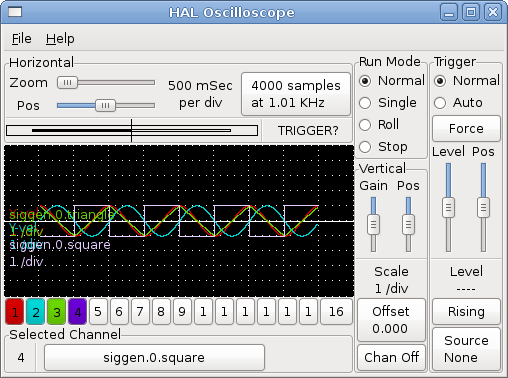
Capture d’ondes. Le grand bouton “Selected Channel” en bas, indique que la voie 4 est actuellement sélectionnée, donc, qu’elle correspond à la pin “siggen.0.square”. Essayez de cliquer sur les autres voies pour mettre leurs traces en évidence.
Les traces sont assez difficiles à distinguer car toutes les quatre sont les unes sur les autres. Pour résoudre ce problème, nous utilisons le curseur “Vertical” situé à droite de l'écran. Ces contrôles agissent sur la voie actuellement sélectionnée. En ajustant le gain, notez qu’il couvre une large échelle (contrairement aux scopes réels), celle-ci permet d’afficher des signaux très petits (pico unités) à très grands (Tera - unités). Le curseur “position” déplace la trace affichée de haut en bas sur toute la hauteur de l'écran. Pour de plus grands ajustements le bouton Offset doit être utilisé (voir les références de halscope dans la section [sec:Halscope] pour plus de détails).
L’utilisation du bouton “Force” n’est parfois pas satisfaisante pour déclencher le scope. Pour régler un déclenchement (triggering) réel, cliquer sur le bouton “Source” situé en bas à droite. Il ouvre alors le dialogue “Trigger Source”, qui est simplement la liste de toutes les sondes actuellement branchées (Figure [fig:Halscope-demo-5] ). Sélectionner la sonde à utiliser pour déclencher en cliquant dessus. Pour notre exemple nous utilisons 3 canaux, essayons l’onde triangle.
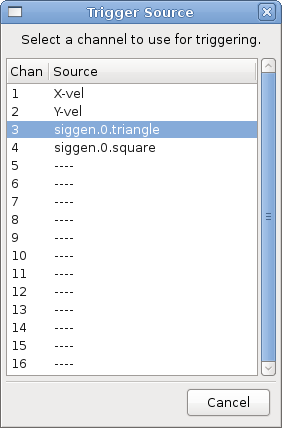
Dialogue des sources de déclenchement. Après avoir défini les sources de déclenchement, il est possible d’ajuster le niveau de déclenchement avec les curseurs dans la boîte ‘` Trigger’' le long du bord droit. Le niveau peut être modifié à partir du haut vers le bas de l'écran, et est affiché sous les curseurs. La position est l’emplacement du point de déclenchement dans l’enregistrement complet. Avec le curseur tout en bas, le point de déclenchement est à la fin de l’enregistrement, et halscope affiche ce qui s’est passé avant le point de déclenchement. Lorsque le curseur est tout en haut, le point de déclenchement est au début de l’enregistrement, l’affichage représente ce qui s’est passé après le point de déclenchement. Le point de déclenchement est visible comme une ligne verticale dans la barre de progression située juste au dessus de l'écran. La polarité du signal de déclenchement peut être inversée en cliquant sur le bouton situé juste sous l’affichage du niveau de déclenchement. Notez que la modification de la position de déclenchement arrête le scope une fois la position ajustée, vous relancez le scope en cliquant sur le bouton “Normal” du groupe “Run Mode”.
Maintenant que nous avons réglé la position verticale et le déclenchement, l'écran doit ressembler à la figure [fig:Halscope-demo-6].
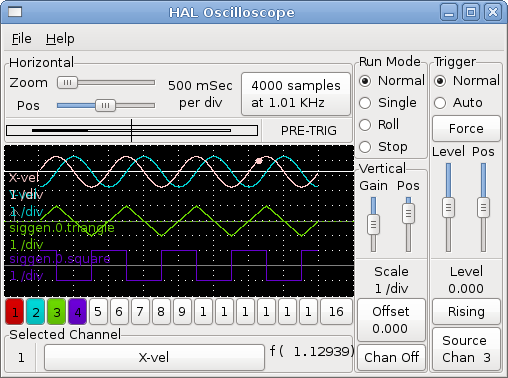
Formes d’ondes avec déclenchement. Pour examiner de près une partie d’une forme d’onde, vous pouvez utiliser le zoom au dessus de l'écran pour étendre la trace horizontalement et le curseur de position pour déterminer quelle partie de l’onde zoomée est visible. Parfois simplement élargir l’onde n’est pas suffisant et il faut augmenter la fréquence d'échantillonnage. Par exemple, nous aimerions voir les impulsions de pas qui sont générés dans notre exemple. Mais les impulsions de pas font seulement 50 us de long, l'échantillonnage à 1kHz n’est pas assez rapide. Pour changer le taux d'échantillonnage, cliquer sur le bouton qui affiche la longueur de l’enregistrement et l'échantillonnage pour avoir le dialogue “Select Sample Rate”, figure [fig:Halscope-demo-7]. Pour notre exemple, nous cliquerons sur le thread “fast”, qui fournira un échantillonnage à environ 20KHz. Maintenant au lieu d’afficher environ 4 secondes de données, un enregistrement est de 4000 échantillons à 20KHz, soit environ 0.20 seconde.
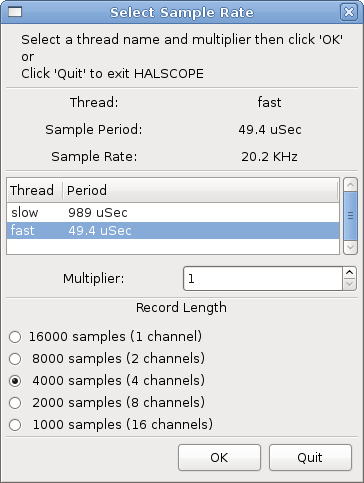
Dialogue de choix d'échantillonnage. Maintenant regardons les impulsions de pas. Halscope dispose de 16 voies, mais pour cet exemple, nous en utilisons seulement 4 à la fois. Avant de sélectionner toute autre voie, nous avons besoin d’en éteindre certaines. Cliquer sur la voie 2, puis sur le bouton "Off'' sous le groupe ‘` vertical''. Ensuite, cliquez sur la voie 3, la mettre off et faire de même pour la voie 4. Même si les circuits sont éteints, ils ont encore en mémoire ce à quoi ils sont connectés et en fait, nous continuerons d'utiliser la voie 3 comme source de déclenchement. Pour ajouter de nouvelles voies, sélectionner la voie 5, choisir la pin `` stepgen.1.dir’, puis la voie 6 et sélectionner "stepgen.1.step'. Ensuite, cliquer sur "mode Normal'' pour lancer le scope, ajustez le zoom horizontal à 5ms par division. Vous devriez voir les impulsions de pas ralentir à la vitesse commandée (voie 1) approcher de zéro, puis la pin de direction changer d'état et les impulsions de pas reprendre de nouveau de la vitesse. Vous aurez peut être besoin d’augmenter le gain sur la voie 1 à environ 20ms par division afin de mieux voir l'évolution de la vitesse de commande. Le résultat devrait être proche de celui de la figure [fig:Halscope-demo-8].
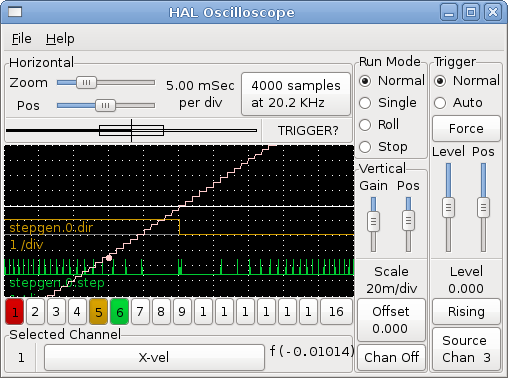
Observer les impulsions de pas. Si vous souhaitez enregistrer plus d'échantillons à la fois, redémarrez le temps réel et chargez halscope avec un argument numérique qui indique le nombre d'échantillons que vous voulez capturer, comme:
halcmd: *loadusr halscope 80000*
Si le composant scope_rt n’est pas déjà chargé, halscope va le
charger et lui demander un
total de 80000 échantillons, de sorte que lorsque l'échantillonnage se
fera sur 4 voies à la fois, il y aura 20000 échantillons par voie. (Si
scope_rt est déjà chargé, l’argument numérique passé à halscope sera
sans effet)
[5] Les champs codeaddr et arg ont été utilisés pendant le développement et devraient probablement disparaître.
[6] Le signe “\” à la fin d’une longue ligne indique que la ligne est tronquée (c’est nécessaire pour formater ce document). Quand vous entrez la commande en ligne dans la console, sautez simplement le “\” (ne pressez pas Entrée) et continuez à taper la ligne suivante.
Les lignes de commandes sont représentées en police bold typewriter.
Les réponses de l’ordinateur sont en police typewriter . Depuis début
2006, plus aucune commande ne nécessite les privilèges
du root, de sorte que tous les exemples seront précédés par le prompt
utilisateur normal, $. Le texte entre crochets est un texte
optionnel [comme-cela]. Le texte entre crochets <comme-cela>
représente un champ qui peut prendre différentes valeurs, le
paragraphe suivant explique les valeurs appropriées. Les items de texte
séparés par une barre verticale signifie que l’un ou l’autre, mais pas
plus, doit être présent. Toutes les lignes de commandes des exemples
supposent que vous êtes dans le répertoire d'emc2/ ou vous avez
configuré ou compilé emc2 avec l’option --run-in-place.
Les chemins seront par conséquent, affichés en accord avec cet
emplacement.
Toutes les entités de HAL sont accessibles et manipulées par leurs
noms, donc, documenter les noms des pins, signaux, paramètres, etc, est
très important. Les noms dans HAL ont un maximum de 41 caractères de
long (comme défini par HAL_NAME_LEN dans hal.h). De nombreux noms
seront présentés dans la forme générale, avec un texte entre crochets
<comme-cela> représentant les champs de valeurs diverses.
Quand les pins, signaux, ou paramètres sont décrits pour la première
fois, leur nom sera précédé par leur type en (PETITES CAPITALES ) et
suivi par une brève description. Les définitions typiques de pins
ressemblent à ces exemples:
-
(bit) ``parport.<portnum>.pin-<pinnum>-in— La HAL pin associée avec la broche physique d’entrée<pinnum>du connecteur db25. -
(float)` pid.<loopnum>.output` — La sortie de la boucle PID.
De temps en temps, une version abrégée du nom peut être utilisée, par
exemple la deuxième pin ci-dessus pourrait être appelée simplement
avec .output quand cela peut être fait sans prêter à confusion.
Le but des conventions de nommage est de rendre l’utilisation de HAL plus facile. Par exemple, si plusieurs interfaces de codeur fournissent le même jeu de pins et qu’elles sont nommées de la même façon, il serait facile de changer l’interface d’un codeur à un autre. Malheureusement, comme tout projet open-source, HAL est la combinaison de choses diversement conçues et comme les choses simples évoluent. Il en résulte de nombreuses incohérences. Cette section vise à remédier à ce problème en définissant certaines conventions, mais il faudra certainement un certain temps avant que tous les modules soient convertis pour les suivre.
Halcmd et d’autres utilitaires HAL de bas niveau, traitent les noms HAL comme de simples entités, sans structure. Toutefois, la plupart des modules ont une certaine structure implicite. Par exemple, une carte fournit plusieurs blocs fonctionnels, chaque bloc peut avoir plusieurs canaux et chaque canal, une ou plusieurs broches. La structure qui en résulte ressemble à une arborescence de répertoires. Même si halcmd ne reconnait pas la structure arborescente, la convention de nommage est un bon choix, elles lui permettra de regrouper ensemble, les items du même groupe, car il trie les noms. En outre, les outils de haut niveau peuvent être conçus pour reconnaitre de telles structures si les noms fournissent les informations nécessaires. Pour cela, tous les modules de HAL devraient suivrent les règles suivantes:
- Les points (“.”) séparent les niveaux hiérarchiques. C’est analogue à la barre de fraction (“/”) dans les noms de fichiers.
- Le tiret (“-”) sépare les mots ou les champs dans la même hiérarchie.
- Les modules HAL ne doivent pas utiliser le caractère souligné ou les casses mélangées. [7]
- Utiliser seulement des caractères minuscules, lettres et chiffres.
3.3. Conventions de nommage des pilotes de matériels[8]
Les pilotes matériels devraient utiliser cinq champs (sur trois niveaux) pour obtenir un nom de pin ou de paramètre, comme le suivant:
Les champs individuels sont:
- <device-name>
- Le matériel avec lequel le pilote est sensé travailler. Il s’agit le plus souvent d’une carte d’interface d’un certain type, mais il existe d’autres possibilités.
- <device-num>
- Il est possible d’installer plusieurs cartes servo, ports parallèles ou autre périphérique matériel dans un ordinateur. Le numéro du périphérique identifie un périphérique spécifique. Les numéros de périphériques commencent à 0 et s’incrémentent.[9]
- <io-type>
- La plupart des périphériques fournissent plus d’un type d’I/O. Même le simple port parallèle a, à la fois plusieurs entrées et plusieurs sorties numériques. Les cartes commerciales plus complexes peuvent avoir des entrées et des sorties numériques, des compteurs de codeurs, des générateurs d’impulsions de pas ou de PWM, des convertisseurs numérique/analogique, analogique/numérique et d’autres possibilités plus spécifiques. Le “I/O type” est utilisé pour identifier le type d’I/O avec lequel la pin ou le paramètre est associé. Idéalement, les pilotes qui implémentent les mêmes type d’I/O, même sur des dispositifs très différents, devraient fournir un jeu de pins et de paramètres cohérents et de comportements identiques. Par exemple, toutes les entrées numériques doivent se comporter de la même manière quand elles sont vues de l’intérieur de HAL, indépendamment du périphérique.
- <chan-num>
- Quasiment tous les périphériques d’I/O ont plusieurs canaux, le numéro de canal “chan-num” identifie un de ceux ci. Comme les numéros de périphériques “device-num”, les numéros de canaux, “chan-num”, commencent à zéro et s’incrémentent.[10] Si plusieurs périphériques sont installés, les numéro de canaux des périphériques supplémentaires recommencent à zéro. Comme il est possible d’avoir un numéro de canal supérieur à 9, les numéros de canaux doivent avoir deux chiffres, avec un zéro en tête pour les nombres inférieur à 10 pour préserver l’ordre des tris. Certains modules ont des pins et/ou des paramètres qui affectent plusieurs canaux. Par exemple un générateur de PWM peut avoir quatre canaux avec quatre entrées “duty-cycle” indépendantes, mais un seul paramètre “frequency” qui contrôle les quatres canaux (à cause de limitations matérielles). Le paramètre “frequency” doit utiliser les numéros de canaux de “00-03”.
- <specific-name>
- Un canal individuel d’I/O peut avoir une seule HAL pin associée avec lui, mais la plupart en ont plus. Par exemple, une entrée numérique a deux pins, une qui est l'état de la broche physique, l’autre qui est la même chose mais inversée. Cela permet au configurateur de choisir entre les deux états de l’entrée, active haute ou active basse. Pour la plupart des types d' entrée/sortie, il existe un jeu standard de broches et de paramètres, (appelé l'“interface canonique”) que le pilote doit implémenter. Les interfaces canoniques sont décrites au chapitre [cha:Priphriques-canoniques].
- motenc.0.encoder.2.position
- — la sortie position du troisième canal codeur sur la première carte Motenc.
- stg.0.din.03.in
- — l'état de la quatrième entrée numérique sur la première carte Servo-to-Go.
- ppmc.0.pwm.00-03.frequency
- — la fréquence porteuse utilisée sur les canaux PWM de 0 à 3.
Les pilotes matériels ont généralement seulement deux types de fonctions HAL, une qui lit l'état du matériel et met à jour les pins HAL, l’autre qui écrit sur le matériel en utilisant les données fournies sur les pins HAL. Ce qui devrait être nommé de la façon suivante:
- <device-name>
- Le même que celui utilisé pour les pins et les paramètres.
- <device-num>
- Le périphérique spécifique auquel la fonction aura accès.
- <io-type>
- Optionnel. Une fonction peut accéder à toutes les d’entrées/sorties d’une carte ou, elle peut accéder seulement à un certain type. Par exemple, il peut y avoir des fonctions indépendantes pour lire les compteurs de codeurs et lire les entrées/sorties numériques. Si de telles fonctions indépendantes existent, le champ <io-type> identifie le type d’I/O auquelles elles auront accès. Si une simple fonction lit toutes les entrés/sorties fournies par la carte, <io-type> n’est pas utilisé.[11]
- <chan-num-range>
- Optionnel. Utilisé seulement si l’entrée/sortie <io-type> est cassée dans des groupes et est accédée par différentes fonctions.
- read|write
- Indique si la fonction lit le matériel ou lui écrit.
- motenc.0.encoder.read
- — lit tous les codeurs sur la première carte motenc.
- generic8255.0.din.09-15.read
- — lit le deuxième port 8 bits sur la première carte d’entrées/sorties à base de 8255.
- ppmc.0.write
- — écrit toutes les sorties (générateur de pas, pwm, DAC et ADC) sur la première carte ppmc.
[7] Les caractères souslignés ont été enlevés, mais il reste quelques cas de mélange de casses, par exemple “pid.0.Pgain” au lieux de “pid.0.p-gain”.
[8] La plupart des pilotes ne suivent pas ces conventions dans la version 2.0. Ce chapitre est réellement un guide pour les développements futurs.
[9] Certains matériels utilisent des cavaliers ou d’autres dispositifs pour définir une identification spécifique à chacun. Idéalement, le pilote fournit une manière à l’utilisateur de dire, le “device-num 0 est spécifique au périphérique qui a l’ID XXX”, ses sous-ensembles porterons tous un numéro commençant par 0. Mais à l’heure actuelle, certains pilotes utilisent l’ID directement comme numéro de périphérique. Ce qui signifie qu’il est possible d’avoir un périphérique Numéro 2, sans en avoir en Numéro 0. C’est un bug qui devrait disparaître en version 2.1.
[10] Une exception à la règle du “numéro de canal commençant à zéro” est le port parallèle. Ses “HAL pins” sont numérotées avec le numéro de la broche correspondante du connecteur DB-25. C’est plus pratique pour le câblage, mais non cohérent avec les autres pilotes. Il y a débat pour savoir si c’est un bogue ou une fonctionnalité.
[11] Note aux programmeurs de pilotes: ne PAS implémenter des fonctions séparées pour différents types d’I/O à moins qu’elles ne soient interruptibles et puissent marcher dans des threads indépendants. Si l’interruption de la lecture d’un codeur pour lire des entrées numériques, puis reprendre la lecture du codeur peut poser problème, alors implémentez une fonction unique qui fera tout.
Les sections qui suivent expliquent les pins, paramètres et functions qui sont fournies par les “périphériques canoniques”. Tous les pilotes de périphériques HAL devraient fournir les mêmes pins et paramètres et implémenter les mêmes comportements.
Noter que seuls les champs <io-type> et <specific-name> sont
définis pour un périphérique canonique. Les champs <device-name>,
<device-num> et <chan-num> sont définis en fonction des
caractéristiques du périphérique réel.
L’entrée numérique canonique (I/O type: digin) est assez simple.
-
(bit)
in— état de l’entrée matérielle. -
(bit)
in-not— état inversé de l’entrée matérielle.
La sortie numérique canonique est également très simple (I/O type:
digout).
L’entrée analogique canonique (I/O type: adcin ). Devrait être
utilisée pour les convertisseurs
analogiques/numériques, qui convertissent par exemple, les tensions en
une échelle continue de valeurs.
- (float) value — Lecture du matériel, avec mise à l'échelle ajustée par les paramètres scale et offset. Value = ((lecture entrée, en unités dépendantes du matériel) * scale) - offset
- (float) scale — La tension d’entrée (ou l’intensité) sera multipliée par scale avant d'être placée dans value.
- (float) offset — Sera soustrait à la tension d’entrée (ou l’intensité) après que la mise à l'échelle par scale ait été appliquée.
- (float) bit_weight — Valeur du bit le moins significatif (LSB). C’est effectivement, la granularité de lecture en entrée.
- (float) hw_offset — Valeur présente sur l’entrée quand 0 volts sont appliqués sur la pin d’entrée.
La sortie analogique canonique (I/O Type: adcout ). Elle est
destinée à tout type de matériel capable de sortir une
échelle plus ou moins étendue de valeurs. Comme par exemple les
convertisseurs numérique/analogique ou les générateurs de PWM.
- (float) value — La valeur à écrire. La valeur réelle sur la sortie matérielle dépends de la mise à l'échelle des paramètres d’offset.
- (bit) enable — Si fausse, la sortie matérielle passera à 0, indépendamment de la pin value.
- (float) offset — Sera ajouté à value avant l’actualisation du matériel.
- (float) scale — Doit être défini de sorte qu’une entrée avec 1 dans value produira 1V
- (float) high_limit (optionnel) — Quand la valeur en sortie matérielle est calculée, si value + offset est plus grande que high_limit, alors high_limit lui sera substitué.
- (float) low_limit (optionnel) — Quand la valeur en sortie matérielle est calculée, si value + offset est plus petite que low_limit, alors low_limit lui sera substitué.
- (float) bit_weight (optionnel) — La valeur du bit le moins significatif (LSB), en Volts (ou mA, pour les sorties courant)
- (float) hw_offset (optionnel) — La tension actuelle (ou l’intensité) présente sur la sortie quand 0 est écrit sur le matériel.
(funct) write — Ecrit la valeur calculée sur la sortie matérielle. Si enable est fausse, la sortie passera à 0, indépendamment des valeurs de value, scale et offset . La signification de “0” dépend du matériel. Par exemple, un convertisseur A/D 12 bits peut vouloir écrire 0x1FF (milieu d'échelle) alors que le convertisseur D/A reçoit 0 Volt de la broche matérielle. Si enable est vraie, l'échelle, l’offset et la valeur sont traités et (scale * value) + offset sont envoyés en sortie de l’adc . Si enable est faux, la sortie passe à 0.
L’interface de codeur canonique(I/O type: encoder ) fournit les
fonctionnalités nécessaires pour une prise d’origine
sur une impulsion d’index et pour la synchronisation avec la vitesse de
broche, ainsi que de base pour le positionnement et/ou le contrôle de
vitesse. Cette interface devrait être implémentable quel que soit le
matériel sous-jacent, même si certains matériels donnent de “meilleurs”
résultats que d’autres. (Par exemple, pour capturer un index de
position à +/- 1 impulsion lors d’un mouvement rapide, ou avoir moins
de fluctuation sur la pin de vitesse).
-
(s32)
count— Valeur de comptage du codeur. -
(float)
position— Valeur de position en unités de longueur (voir paramètre “scale”). -
(float)
velocity— Vitesse en unités de longueur par seconde. -
(bit)
reset— Quand il est vrai, force le compteur à zéro. -
(bit)
index-enable— (bidirectionnel) Quand il est vrai, remise à zéro à la prochaine impulsion d’index et passe les pins sur faux.
La pin “index-enable” est bi-directionnelle, elle exige un peu plus d’explications. Si “index-enable” est faux, le canal d’index du codeur sera ignoré et le compteur comptera normalement. Le pilote du codeur ne passera jamais “index-enable” sur vrai. Cependant, un autre composant peut le faire. Si “index-enable” est vrai, alors quand la prochaine impulsion d’index arrivera, le compteur du codeur sera remis à zéro et le pilote passera “index-enable” sur faux. Ce qui permettra à l’autre composant de savoir qu’une impulsion d’index est arrivée. C’est une forme de poignée de main, l’autre composant passe “index-enable” sur vrai pour requérir une remise à zéro du comptage d’impulsion d’index et le pilote le repasse sur faux quand la requête à été satisfaite.
-
(float)
scale— Le facteur d'échelle à utiliser pour convertir la valeur de comptage (count) en unités de longueur. Il se trouve dans “counts par unité de longueur”. Par exemple, si vous avez un codeur qui fournit 512 impulsions par tour de codeur sur une vis qui fait 5 tours par pouce, l'échelle (scale) devra être de 512*5 = 2560 counts par pouce, ce qui se traduira par la “position” en pouces et la “vitesse” en pouces par seconde. -
(float)
max-index-vel— (optionnel) La vitesse maximale (en unités de longueur par seconde) à laquelle le codeur peut remettre le comptage à zéro avec une précision de +/- 1 impulsion. Il s’agit d’une sortie du pilote du codeur, elle est destinée à informer l’utilisateur des capacités du codeur. Certains codeurs peuvent remettre le comptage à zéro exactement à l’apparition de l’impulsion d’index. D’autres peuvent seulement dire qu’une impulsion d’index s’est produite depuis la dernière fois que la fonction de lecture à été appelée. Pour ces derniers, une précision de +/- 1 impulsion ne peut être atteinte que si le codeur avance d’une impulsion ou moins entre deux appels à la fonction de lecture. -
(float)
velocity-resolution— (optionnel) La résolution de la sortie vitesse, en unités de longueur par seconde. Il s’agit d’une sortie du pilote du codeur, elle est destinée à informer l’utilisateur des capacités du codeur. L’implémentation la plus simple de la sortie vitesse est le changement de position entre deux appels à la fonction de lecture, divisé par le temps entre ces appels. Cela permet d’obtenir un signal de vitesse grossier avec des fluctuations évaluées entre deux valeurs aussi éloignées que possible (erreur de quantification). Cependant, certains matériels capturent le comptage et le temps exact quand une impulsion arrive (éventuellement avec une haute résolution d’horloge). Ces données permettent au pilote de calculer une vitesse avec une résolution plus fine et moins de fluctuations.
Halcmd est un outil en ligne de commande pour manipuler HAL. Il existe une man page plus complète pour halcmd, elle sera installée en même temps qu' EMC2 depuis ses sources ou depuis un paquet. Si EMC2 a été compilé en “run-in-place”, la man page n’est pas installée, mais elle est accessible, dans le répertoire principal d’EMC2, taper:
$
Le chapitre [cha:Tutoriel-HAL] donne de nombreux exemples d’utilisation de halcmd.
Halmeter est un “voltmètre” pour HAL. Il permet de regarder les pins,
signaux, ou paramètres en affichant la valeur courante de ces items. Il
est très simple à utiliser. Dans une console taper “halmeter ”.
Halmeter est une application pour environnement graphique. Deux
fenêtres vont apparaîtrent, la fenêtre de sélection est la plus grande.
Elle comprend trois onglets. Un onglet liste toutes les pins
actuellement définies dans HAL. Le suivant, liste tous les signaux et
le dernier onglet, liste tous les paramètres. Cliquer sur un onglet,
puis cliquer sur un des pin/signal/paramètre pour le sélectionner. La
petite fenêtre affichera le nom et la valeur de l’item sélectionné.
L’affichage est mis à jour environ 10 fois par seconde. Pour libérer de
la place sur l'écran, la fenêtre de sélection peut être fermée avec le
bouton “Close”. Sur la petite fenêtre, cachée sous la grande à
l’ouverture, le bouton “Select”, réouvre la fenêtre de sélection et le
bouton Exit arrête le programme et ferme les fenêtres.
Il est possible d’ouvrir et de faire fonctionner simultanément
plusieurs halmeters, ce qui permet de visualiser plusieurs items en
même temps. Pour ouvrir un halmeter en libérant la console, taper
“halmeter & ” pour le lancer en tâche de fond. Il est possible de
lancer halmeter
en lui faisant afficher immédiatement un item, pour cela, ajouter les
arguments sur la ligne de commande “pin|sig|par[am] <nom> ”. Il
affichera le signal, pin, ou paramètre <nom> dès qu’il
démarrera. (Si l’item indiqué n’existe pas, il démarrera normalement.
Finalement, si un item est spécifié pour l’affichage, il est possible
d’ajouter “-s” devant pin|sig|param pour indiquer à halmeter d’utiliser
une fenêtre encore plus réduite. Le nom de l’item sera affiché dans la
barre de titre au lieu de sous la valeur et il n’y aura pas de bouton.
Utile pour afficher beaucoup de halmeter dans un petit espace de
l'écran.
Se référer à la section [sec:Tutoriel - Halmeter] Halmeter dans le tutoriel.
Halscope est un “oscilloscope” pour HAL. Il permet de capturer la valeur des pins, signaux et paramètres en fonction du temps. Des instructions plus complètes seront ajoutées ici, éventuellement. Se référer à la section Halscope [sec:Tutoriel - Halscope] dans le tutoriel, qui explique les bases de son utilisation.
- 6.1. Introduction
- 6.2. Définitions
- 6.3. Création d’instance
- 6.4. Syntaxe
- 6.5. Stockage des données «par-instance»
- 6.6. Autres restrictions sur les fichiers comp
- 6.7. Conventions des macros
- 6.8. Composants avec une seule fonction
- 6.9. «Personnalité» du composant
- 6.10. Compiler un fichier
.compdans l’arborescence - 6.11. Compiler un composant temps réel hors de l’arborescence
- 6.12. Compiler un composant de l’espace utilisateur hors de l’arborescence
- 6.13. Exemples
Ecrire un composant de HAL peut se révéler être une tâche ennuyeuse,
la plupart de cette tâche consiste à appeler des fonctions rtapi_ et
hal_ et à contrôler les erreurs associées à ces fonctions. comp va
écrire tout ce code pour vous, automatiquement.
Compiler un composant de HAL est également beaucoup plus simple en utilisant comp , que le composant fasse partie de l’arborescence d’emc2, ou qu’il en soit extérieur.
Par exemple, cette portion des blocks «ddt» fait environ 80 lignes de code. Le composant équivalent est vraiment très court quand il est écrit en utilisant le préprocesseur comp:
component ddt "Calcule la dérivée de la fonction d'entrée";
et il peut être compilé et installé très facilement en plaçant
simplement ddt.comp dans «src/hal/components» puis en lançant
«make`», ou en le plaçant quelque part sur le système et en lançant
`«comp --install ddt.comp»
- component
-
Un composant est un simple module temps réel, qui se charge avec
«halcmd loadrt`». Un fichier `.compspécifie un seul composant. - instance
- Un composant peut avoir zéro ou plusieurs instances. Chaque instance d’un composant est créée égale (elles ont toutes les mêmes pins, les mêmes paramètres, les mêmes fonctions et les mêmes données) mais elle se comporte de manière différente quand leurs pins, leurs paramètres et leur données ont des valeurs différentes.
- singleton
-
Il est possible pour un composant d'être un singleton (composant
dont il n’existe qu’une seule instance), dans ce cas, exactement une
seule instance est créée. Il est rarement logique d'écrire un composant
singleton, à moins qu’il n’y ait qu’un seul objet de ce type dans le système (par exemple, un composant ayant pour but de fournir une pin avec le temps Unix courant, ou un pilote matériel pour le haut parleur interne du PC)
Pour un singleton, une seule instance est créée quand le composant est chargé.
Pour un non-singleton, le paramètre count du module détermine
combien d’instances seront créées.
Un fichier .comp commence par un certain nombre de déclarations,
puis par un «;;» seul sur sa propre ligne. Il se terminé par le code
C implémentant
les fonctions du module.
Déclarations d’include:
-
component ``HALNAME``(DOC); -
pin ``PINDIRECTION``TYPE``HALNAME` ([`SIZE]|[MAXSIZE `:`CONDSIZE]) (if ``CONDITION) (= ``STARTVALUE) (DOC); -
param ``PARAMDIRECTION``TYPE``HALNAME` ([`SIZE]|[MAXSIZE `:`CONDSIZE]) (if ``CONDITION) `(=`STARTVALUE) (DOC) ; -
function ``HALNAME` (fp | nofp) (`DOC); -
option ``OPT` (`VALUE); -
variable ``CTYPE NAME `([`SIZE]); -
description DOC; -
see_also DOC; -
license LICENSE; -
author AUTHOR;
Les parenthèses indiquent un item optionnel. Une barre verticale indique une alternative. Les mots en CAPITALES indiquent une variable texte, comme ci-dessous:
- HALNAME
Un identifiant. Lorsqu’ils sont utilisés pour créer un identifiant de HAL, tous les caractères soulignés sont remplacés par des tirets, tous les points et les virgules de fin, sont supprimés, ainsi «ce_nom_» est remplacé par «ce-nom» et si le nom
«_`», alors le point final est enlevé aussi, ainsi `«function _`» donne un nom de fonction HAL tel que `component.<num>au lieu decomponent.<num>.S’il est présent, le préfixehal_est enlevé du début d’un nom de composant pour la création des pins des paramètres et des fonctions. Dans l’identifiant de HAL pour une pin ou un paramètre, # indique un membre de tableau, il doit être utilisé conjointement avec une déclaration[SIZE]. Les «hash marks» sont remplacées par des nombres de 0-barrés équivalents aux nombres de caractères #. Quand ils sont utilisés pour créer des identifiants C, les changements de caractères suivants sont appliqués au HALNAME:- Tous les caractères # sont enlevés ainsi que tous les caractères «.», «_» ou «-» immédiatement devant eux.
- Dans un nom, tous les carcatères «.» et «-» sont remplacés par «_»
- Les caractères «» répétitifs sont remplacés par un seul caractère «_». Un «_» final est maintenu, de sorte que les identifiants de HAL, qui autrement seraient en conflit avec les noms ou mots clé réservés (par exemple: «min»), puissent être utilisés. [width="90%", options="header"] |======================================== |HALNAME | Identifiant C | Identifiant HAL |x_y_z | x_y_z | x-y-z |x-y.z | x_y_z | x-y.z |x_y_z | x_y_z_ | x-y-z |x..y | x_y(MM) | x.MM.z |x. | x(MM) | x.MM |========================================
- if CONDITION
- Une expression impliquant la personnalité d’une variable non nulle quand la variable ou le paramètre doit être créé.
- SIZE
- Un nombre donnant la taille d’un tableau. Les items des tableaus sont numérotés de 0 à SIZE-1.
- MAXSIZE : CONDSIZE
- Un nombre donnant la taille maximum d’un tableau, suivi d’une expression impliquant la personnalité d’une variable et qui aura toujours une valeur inférieure à MAXSIZE. Quand le tableau est créé sa taille est égale à CONDSIZE.
- DOC
-
Une chaine qui documente l’item. La chaine doit être au format C,
«entre guillemets», comme
"Sélectionnez le front désiré: TRUE pour descendant, FALSE pour montant"ou au format Python «triples guillemets», pouvant inclure des caractères newlines et des guillements, comme: param rw bit zot=TRUE La chaine documentation est en format «groff -man». Pour plus d’informations sur ce format de markup, voyezgroff_man(7). Souvenez vous que comp interpréte backslash comme Echap dans les chaines, ainsi par exemple pour passer le mot example en font italique, ecrivez `«\\fIexample\\fB`». - TYPE
-
Un des types de HAL:
bit,signed (sign`é), `unsigned (non sign`é) ou `float (flott`ant). Les anciens noms `s32etu32peuvent encore être utilisés, maissignedetunsignedsont préférables. - PINDIRECTION
-
Une des ces directions:
in,out, ouio. Le composant pourra positionner la valeur d’une pin de sortie, il pourra lire la valeur sur une pin d’entrée et il pourra lire ou positionner la valeur d’une pinio. - PARAMDIRECTION
-
Une des valeurs suivantes:
rourw. Le composant pourra positionner la valeur d’un paramètreret il pourra positionner ou lire la valeur d’un paramètre rw. - STARTVALUE
-
Spécifie la valeur initiale d’une pin ou d’un paramètre. Si il n’est
pas spécifié, alors la valeur par défaut est
0ouFALSE, selon le type de l’item. - fp
- Indique que la fonction effectuera ses calculs en virgule flottante.
- nofp
-
Indique que la fonction effectuera ses calculs sur des entiers. Si il
n’est pas spécifié,
fpest utilisé. Ni comp ni gcc ne peuvent détecter l’utilisation de calculs en virgule flottante dans les fonctions marquéesnofp. - OPT, VALUE
Selon le nom de l’option OPT, les valeurs VALUE varient. Les options actuellement définies sont les suivantes:
- option singleton yes
-
(défaut: no)
Ne crée pas le paramètre numéro de module et crée toujours une seule
instance. Avec
singleton, les items sont nomméscomposant-name.item-nameet sanssingleton, les items des différentes instances sont nomméscomposant-name.<num>.item-name. - option default_count
-
number (défaut: 1)
Normalement, le paramètre
count pardéfaut est 0. Si spécifié,countremplace la valeur par défaut. - option count_function yes
-
(défaut: no)
Normalement, le numéro des instances à créer est specifié dans le
paramètre
countdu module, sicount_functionest spécifié, la valeur retournée par la fonctionint get_count(void)est utilisée à la place de la valeur par défaut et le paramètrecountdu module n’est pas défini. - option rtapi_app no
-
(défaut: yes)
Normalement, les fonctions
rtapi_app_mainetrtapi_app_exitsont définies automatiquement. Avecoption rtapi_app no, elles ne le seront pas et doivent être fournies dans le code C. Quand vous implémentez votre proprertapi_app_main, appellez la fonctionint export(char *prefix, long extra_arg)pour enregistrer les pins, paramètres et fonctions pour `préfix`er. - option data
-
type (défaut: none) deprecated
If specified, each instance of the component will have an associated
data block of type (which can be a simple type like
floator the name of a type created withtypedef). In new components, variable should be used instead.
- option extra_setup yes
(défaut: no)
- option extra_cleanup yes
-
(défaut: no)
Si spécifié, appelle la fonction définie par
EXTRA_CLEANUPdepuis la fonction définie automatiquementrtapi_app_exit, ou une erreur est détectée dans la fonction automatiquement définiertapi_app_main. - option userspace yes
-
(défaut: no)
Si spécifié, ce fichier décrit un composant d’espace utilisateur,
plutôt que le réel. Un composant d’espace utilisateur peut ne pas
avoir
de fonction définie par la directive de fonction. Au lieu de cela,
après que toutes les instances soient construites, la fonction C
user_mainloop()est appelée. Dès la fin de cette fonction, le composant se termine. En règle générale,user_mainloop()va utiliserFOR_ALL_INSTS()pour effectuer la mise à jour pour chaque action, puis attendre un court instant. Une autre action commune dansuser_mainloop()peut être d’appeler le gestionnaire de boucles d'événements d’une interface graphique. - option userinit yes
-
(défaut: no)
Si spécifiée, la fonction
userinit(argc,argv)est appelée avantrtapi_app_main()(et cela avant l’appel dehal_init()). Cette fonction peut traiter les arguments de la ligne de commande ou exécuter d’autres actions. Son type de retour estvoid; elle peut appelerexit()et si elle le veut, se terminer sans créer de composant HAL (par exemple, parce que les arguments de la ligne de commande sont invalides). Si aucune option VALUE n’est spécifiée, alors c’est équivalent à spécifier la valeur`… yes` . Le résultat consécutif à l’assignation d’une valeur inappropriée à une option est indéterminé. Le résultat consécutif à n’utiliser aucune autre option est indéfini.
- LICENSE
- Spécifie la license du module, pour la documentation et pour le module déclaré dans MODULE_LICENSE().
- AUTHOR
- Spécifie l’auteur du module, pour la documentation
- variable
- CTYPE NAME;
- variable
- CTYPE NAME[SIZE];
- variable
- CTYPE NAME' = 'default;
- variable
-
CTYPE NAME[SIZE] = default;
Déclare la variable «par-instance» NAME de type CTYPE,
optionnellement comme un tableau de SIZE items et optionnellement
avec une valeur default. Les items sans default sont initialisés
«all-bits-zero». CTYPE est un simple mot de type C, comme
float,u32,s32, etc. Les variables d’un tableau sont mises entre crochets.
Les commentaires de style C++ une ligne (// …) et de style C
multi-lignes (/* … */) sont supportés tous les deux dans la section
déclaration.
Bien que HAL permette à une pin, un paramètre et une fonction d’avoir le même nom, comp ne le permet pas.
En se basant sur les déclarations des items de section, comp crée
une structure C appellée structure d'état . Cependant, au lieu de
faire référence aux membres de cette structure
(par exemple: *(inst->name) ), il leur sera généralement fait
référence en utilisant les macros
ci-dessous. Certains détails de la structure d'état et de ces macros
peuvent différer d’une version de comp à la suivante.
- FUNCTION(name)
-
Cette macro s’utilise au début de la définition d’une fonction temps
réel qui aura été précédemment déclarée avec
function NAME. function inclus un paramètre 'period' qui est le nombre entier de nanosecondes entre les appels à la fonction. - EXTRA_SETUP()
-
Cette macro s’utilise au début de la définition de la fonction appelée
pour exécuter les réglages complémentaires à cette instance. Une valeur
de retour négative (Unix
errno)indique un défaut (par exemple:elle retourne -EBUSYcomme défaut à la réservation d’un port d’entrées/sorties), une valeur égale à 0 indique le succés. - EXTRA_CLEANUP()
- Cette macro s’utilise au début de la définition de la fonction appelée pour exécuter un nettoyage (cleanup) du composant. Noter que cette fonction doit nettoyer toutes les instances du composant, pas juste un. Les macros pin_name, parameter_name et data ne doivent pas être utilisées ici.
- pin_name , parameter_name
-
Pour chaque pin, ‘pin_name` ou pour chaque paramètre,
parameter_nameil y a une macro qui permet d’utiliser le nom seul pour faire référence à la pin ou au paramètre. Quandpin_nameouparameter_namesont des tableaux, la macro est de la forme pin_name(idx) ou param_name(idx) 'dans laquelle 'idx est l’index dans le tableau de pins. Quand le tableau est de taille variable, il est seulement légal de faire référence aux items par leurs’condsize’. Quand un item est conditionnel, il est seulement légal de faire référence à cet item quand ses conditions 'sont évaluées 'à des valeurs différentes de zéro. - variable_name
-
Pour chaque variable,
il y a une macro variable_namequi permet au nom seul d'être utilisé pour faire référence à la variable. Quandvariable_nameest un tableau, le style normal de C est utilisé: variable_name[idx] - data
- Si l'«option data» est spécifiée, cette macro permet l’accès à l’instance de la donnée.
- fperiod
- Le nombre de secondes en virgule flottante entre les appels à cette fonction temps réel.
- FOR_ALL_INSTS() {
-
…} Pour les composants de l’espace utilisateur. Cette macro utilise la variablestruct state *instpour itérer au dessus de toutes les instances définies. Dans le corps de la boucle, les macros pin_name, parameter_name et data travaillent comme elles le font dans les fonctions temps réel.
Si un composant a seulement une fonction et que la chaine «FUNCTION»
n’apparaît nulle part après ;;, alors la portion après ;; est
considérée comme étant le corps d’un composant simple fonction.
Si un composant a n’importe combien de pins ou de paramètres avec un «if condition'» ou «['maxsize : condsize]», il est appelé un composant avec «personnalit é». La «personnalité» de chaque instance est spécifiée quand le module est chargé. La «Personnalité» peut être utilisée pour créer les pins seulement quand c’est nécessaire. Par exemple, la personnalité peut être utilisée dans un composant logique, pour donner un nombre variable de broches d’entrée à chaque porte logique et permettre la sélection de n’importe quelle fonction de logique booléenne de base and, or et xor.
Placer le fichier .comp dans le répertoire emc2/src/hal/components
et lancer/relancer «make`». `Les fichiers Comp sont automatiquement
détectés par le système de compilation.
Si un fichier .comp est un pilote de périphérique, il peut être
placé dans emc2/src/hal/components et il y sera construit excepté si
emc2 est configuré en mode
simulation.
comp peut traiter, compiler et installer un composant temps réel en
une
seule étape, en plaçant rtexample.ko dans le répertoire du module
temps réel d’emc2:
comp --install rtexample.comp
Ou il peut aussi être traité et compilé en une seule étape en laissant
example.ko (ou example.so pour la simulation) dans le répertoire
courant:
comp --compile rtexample.comp
Ou il peut simplement être traité en laissant example.c dans le
répertoire courant:
comp rtexample.comp
comp peut aussi compiler et installer un composant écrit en C, en
utilisant les options --install et --compile comme ci-dessous:
comp --install rtexample2.c
La documentation au format man peut être créée à partir des informations de la section «declaration»:
comp --document rtexample.comp
La manpage résultante, exemple.9 peut être lue avec:
man ./exemple.9
ou copiée à un emplacement standard pour une page de manuel.
comp peut traiter, compiler et installer un document de l’espace
utilisateur:
comp usrexample.comp
Cela fonctionne seulement pour les fichiers .comp mais pas pour les
fichiers .c.
Ce composant fonctionne comme dans blocks, y compris la valeur par défaut à 1.0. La déclaration «function _» crée les fonctions nommées constant.0, etc.
component constant;
Ce composant calcule le sinus et le cosinus d’un angle entré en radians. Il a différentes possibilités comme les sorties sinus et cosinus de siggen, parceque l’entrée est un angle au lieu d'être librement basé sur un paramètre frequency.
Les pins sont déclarées avec les noms sin_ et cos_ dans le code
source pour que ça n’interfère pas avec les fonctions sin() et
cos(). Les pins de HAL sont toujours appelées sincos.<num>.sin.
component sincos;
Ce composant est un pilote pour une carte imaginaire appelée «out8»,
qui a 8 pins de sortie digitales qui sont traitées comme une simple
valeur sur 8 bits. Il peut y avoir un nombre quelconque de ces cartes
dans le système et elles peuvent avoir des adresses variées. La pin est
appelée out_ parceque out est un identifiant utilisé dans
<asm/io.h>. Il illustre l’utilisation de EXTRA_SETUP et de
EXTRA_CLEANUP pour sa requête de région d’entrées/sorties et libère
cette région en
cas d’erreur ou quand le module est déchargé.
component out8;
pin out unsigned out_ "Output value; only low 8 bits are used";
param r unsigned ioaddr;
function _;
option count_function;
option extra_setup;
option extra_cleanup;
option constructable no;
license "GPL";
;;
#include <asm/io.h>
#define MAX 8
int io[MAX] = {0,};
RTAPI_MP_ARRAY_INT(io, MAX, "I/O addresses of out8 boards");
int get_count(void) {
int i = 0;
for(i=0; i<MAX && io[i]; i++) { /* Nothing */ }
return i;
}
EXTRA_SETUP() {
if(!rtapi_request_region(io[extra_arg], 1, "out8")) {
// set this I/O port to 0 so that EXTRA_CLEANUP does not release the IO
// ports that were never requested.
io[extra_arg] = 0;
return -EBUSY;
}
ioaddr = io[extra_arg];
return 0;
}
EXTRA_CLEANUP() {
int i;
for(i=0; i < MAX && io[i]; i++) {
rtapi_release_region(io[i], 1);
}
}
FUNCTION(_) { outb(out_, ioaddr); }component hal_loop;
Ce fragment de composant illustre l’utilisation du préfixe hal_ dans
un nom de composant. loop est le nom d’un module standard du kernel
Linux, donc un composant loop ne pourrait pas être chargé si le
module loop de Linux est également
présent.
Quand il le charge, halcmd montre un composant appelé hal_loop.
Cependant, les pins affichées par halcmd sont loop.0.example et non
hal-loop.0.example.
Ce composant temps réel illustre l’utilisation d’un tableau de taille fixe:
component arraydemo "Registre à décalage 4-bits";
Ce composant de l’espace utilisateur modifie la valeur de ses pins de sortie vers une nouvelle valeur aléatoire dans l'étendue à chaque ms.
component rand;
option userspace;
pin out float out;
license "GPL";
;;
#include <unistd.h>
void user_mainloop(void) {
while(1) {
usleep(1000);
FOR_ALL_INSTS() out = drand48();
}
}Ce composant temps réel montre l’utilisation de la «personnalité» pour créer un tableau de taille variable et des pins optionnelles.
component logic "EMC2 HAL component providing experimental logic functions";
pin in bit in-##[16 : personality & 0xff];
pin out bit and if personality & 0x100;
pin out bit or if personality & 0x200;
pin out bit xor if personality & 0x400;
function _ nofp;
description """
Experimental general `logic function' component. Can perform `and', `or'
and `xor' of up to 16 inputs. Determine the proper value for `personality'
by adding:
.IP \\(bu 4
The number of input pins, usually from 2 to 16
.IP \\(bu
256 (0x100) if the `and' output is desired
.IP \\(bu
512 (0x200) if the `or' output is desired
.IP \\(bu
1024 (0x400) if the `xor' (exclusive or) output is desired""";
license "GPL";
;;
FUNCTION(_) {
int i, a=1, o=0, x=0;
for(i=0; i < (personality & 0xff); i++) {
if(in(i)) { o = 1; x = !x; }
else { a = 0; }
}
if(personality & 0x100) and = a;
if(personality & 0x200) or = o;
if(personality & 0x400) xor = x;
}Une ligne de chargement typique pourrait être:
loadrt logic count=3 personality=0x102,0x305,0x503
qui créerait les pins suivantes:
- Une porte AND à 2 entrées: logic.0.and, logic.0.in-00, logic.0.in-01
- des portes AND et OR à 5 entrées: logic.1.and, logic.1.or, logic.1.in-00, logic.1.in-01, logic.1.in-02, logic.1.in-03, logic.1.in-04,
- des portes AND et XOR à 3 entrées: logic.2.and, logic.2.xor, logic.2.in-00, logic.2.in-01, logic.2.in-02
Un composant de l’espace utilisateur commence par créer ses pins et
ses paramètres, puis il entre dans une boucle de laquelle il va
positionner périodiquement toutes ses sorties en fonction de ses
entrées. Le composant suivant, un passe-tout, copie la valeur vue sur
ses pins d’entrée (passthrough.in) vers ses pins de sortie
(passthrough.out) approximativement une fois par seconde.
#!/usr/bin/python
Copier le listing précédent dans un fichier nommé «passthrough», le
rendre exécutable par un «chmod +x» `et le placer dans son `$PATH. On
peut alors l’essayer en faisant:
$ halrun
Si vous tapez rapidement «show pin», vous pourrez voir que
passthrough.out conserve un moment son ancienne valeur de 0. Ceci
est dû à l’appel de
la fonction time.sleep(1), qui fait que les pins de sortie changent
d'état, au plus, une fois par seconde. Parceque ce composant appartient
à l’espace utilisateur, ce délai peut apparaître plus long, par exemple
si la mémoire utilisée par le composant passthrough est échangée avec
le disque dur, le délai peut être allongé jusqu’au raffraîchissement de
la mémoire.
Ces composants de l’espace utilisateur conviennent parfaitement pour des éléments tels que des panneaux de contrôle pour lesquels des délais de l’ordre de quelques millisecondes sont imperceptibles. Ils ne conviennent pas, en revanche, pour envoyer des impulsions de pas vers une carte de pilotage de périphériques pour lesquelles les délais doivent rester de l’ordre de quelques microsecondes, dans tous les cas).
h = hal.component("passthrough")Le composant lui-même est créé par l’appel du constructeur
'hal.component '. Les arguments sont le nom du composant HAL et
optionnellement, le
préfixe utilisé pour les noms de pin et de paramètre. Si le préfixe
n’est pas spécifié, le nom du composant est utilisé.
h.newpin("in", hal.HAL_FLOAT, hal.HAL_IN)Puis les pins sont créées par appels des méthodes sur l’objet composant. Les arguments sont: pin nom suffixe, type de pin et direction de la pin. Pour les paramètres, les arguments sont: paramètre nom suffixe, type de paramètre et direction du paramètre.
Table 7.1. HAL Option Names
| Types de Pin et Paramètre: | HAL_BIT | HAL_FLOAT | HAL_S32 | HAL_U32 |
|---|---|---|---|---|
Directions des pins: | HAL_IN | HAL_OUT | HAL_IO | |
Directions des paramètres: | HAL_RO | HAL_RW |
Le nom complet d’une pin ou d’un paramètre est formé en joignant le
préfixe avec le suffixe par un «.», comme dans l’exemple où la pin
créée est appelée passthrough.in.
h.ready()
Une fois toutes les pins et les paramètres créés, la méthode .ready()
est appelée.
Pour les pins et les paramètres qui sont aussi des identifiants Python, la valeur est accessible ou ajustable en utilisant la syntaxe des attributs suivante:
h.out = h.in
Pour les pins et les paramètres qui sont aussi des identifiants Python, la valeur est accessible ou ajustable en utilisant la syntaxe de sous-script suivante:
h['out'] = h['in']
Périodiquement, habituellement dans le temps de réponse de l’horloge, toutes les pins HAL_OUT doivent être «pilotées» en leur assignant une nouvelle valeur. Ceci doit être fait que la valeur soit différente ou non de la valeur précédemment assignée. Quand la pin est connectée au signal, l’ancienne valeur de sortie n’est pas copiée vers le signal, la valeur correcte n’apparaîtra donc sur le signal qu’une fois que le composant lui aura assigné une nouvelle valeur.
La règle mentionnée ci-dessus ne s’applique pas aux pins bidirectionnelles. Au lieux de celà, une pin bidirectionnelle doit seulement être pilotée par le composant et quand le composant souhaîte changer sa valeur. Par exemple, dans l’interface codeur, le composant codeur positionne seulement la pin index-enable à FALSE quand une impulsion d’index est vue et que l’ancienne valeur est TRUE, mais ne la positionne jamais à TRUE. Piloter répétitivement la pin à FALSE pourrait faire qu’un autre composant connecté agisse comme si une nouvelle impulsion d’index avait été vue.
Une requête «halcmd unload`» pour le composant est délivrée comme une
exception `KeyboardInterrupt . Quand une requête de déchargement
arrive, le processus doit quitter
dans un court laps de temps ou appeler la méthode .exit() sur le
composant si un travail substentiel, comme la lecture ou
l'écriture de fichiers, doit être fourni pour terminer le processus
d’arrêt.
- Créer un panneau de contrôle extérieur avec boutons poussoirs, interrupteurs et voyants. Connecter le tout à un microcontrolleur et raccorder le microcontrolleur à un PC en utilisant une liaison série. Python est vraiment capable d’interfacer une liaison série grâce à son module pyserial (Paquet «python-serial,dans les dépots universe d’Ubuntu)
- Relier un module d’affichage à LCD LCDProc et l’utiliser pour afficher les informations de votre choix (Paquet «lcdproc», dans les dépots universe d’Ubuntu)
- Créer un panneau de contrôle virtuel utilisant n’importe quelle librairie d’interface graphique supportée par Python (gtk, qt, wxwindows, etc)